基于數值模擬和機器學習的汽車碰撞代理模型
2021-03-13 08:38:00牟哲岳黃桂灶
重慶大學學報 2021年2期
林 翔,嚴 波,,牟哲岳,文 楠,黃桂灶
(重慶大學 a.汽車協同創新中心;b.航空航天學院,重慶 400044)
汽車碰撞屬于嚴重的交通事故,一旦發生對人們的生命以及財產安全都將構成極大的威脅,所以研究汽車碰撞安全性問題一直是汽車發展的熱點問題之一。提升汽車的碰撞安全性,設計更加合理的結構,對減少碰撞事故帶來的危害具有重要意義[1]。
自1889年美國紐約街頭發生第一次汽車碰撞事故以來,已有不少采用實車碰撞實驗研究汽車碰撞安全性的報道[2,3]。隨著計算機硬件和計算力學方法和軟件的發展,數值模擬已成為研究汽車碰撞的重要手段[4,5]。1986年LS-DYNA首次成功模擬了整車碰撞變形全過程[6]。黃金陵等[7]以閉口等截面薄壁直梁件為研究對象進行了汽車正面碰撞仿真和數值模擬,并將研究成果應用于紅旗轎車車身結構正面碰撞仿真模擬中。Hu等[8]以長安SC6350汽車為研究對象,采用數值模擬和實驗相結合的方法,改進了該汽車的正面碰撞性能。由于汽車結構極為復雜,碰撞過程數值模擬代價依然高昂。
近年,隨著人工智能技術的發展,機器學習方法在工程領域的應用研究受到越來越多的重視。張曉云[9]首次將有限元和神經網絡技術與汽車碰撞事故再現相結合,分析了事故發生瞬間的事故車輛關鍵點的測量值,對汽車結構安全設計提供指導。聶隱愚等[10]針對高速列車,將Kriging模型和Legendre多項式回歸應用于車輛動力學建模與仿真分析,提出了一種基于數據驅動的列車建模和仿真方法,優化了車輛多體動力學表達高度非線性力學行為的計算精度。Tang等[11]利用有限元仿真獲得列車碰撞響應數據,建立了一種以數據驅動的列車碰撞動力學模型。
1 汽車碰撞動態過程數值模擬
以某型皮卡車為對象,建立三維實體有限元模型,采用ABAQUS有限元軟件,模擬該汽車與剛性墻壁碰撞和兩車相向碰撞的動態響應過程。考慮5種不同初始速度的情況,模擬結果為代理模型的建立提供數據。
1.1 汽車有限元模型
汽車結構復雜,且碰撞過程涉及大變形非線性動態問題,計算模擬代價高。先在本節中建立某型皮卡車的有限元模型。為了提高計算效率,在保證精度的前提下對結構進行簡化。整車模型主要包括白車身、動力總成、車門總成、車輪等,由226個部件組成,如圖1(a)所示。其中白車身主要由薄壁板件組成,為保證模擬結果的正確性和精度,模型中對關鍵部位和部件僅對小的細節進行簡化[12]。動力總成主要包括發動機和變速器兩大部件,其結構極其復雜,微小部件多,忽略它們的變形在碰撞過程中對整體結構的影響,將其簡化成剛體。
建立的有限元模型見圖1(b)。車身采用四節點殼單元、六面體單元、梁單元、桿單元等進行離散,單元總數為194 924個。各部之間的連接方式為點焊連接、螺栓連接、鉸鏈連接、粘合等。其中點焊連接采用Beam單元進行模擬,螺栓連接采用耦合連接進行處理,鉸鏈連接采用joints連接關系進行簡化,采用Adhesive單元模擬部件之間的粘合。

圖1 某皮卡車整車分析模型Fig.1 Analytical model of a pickup truck
該車車身大部分構件采用鋼和鋁。輪胎由橡膠和多種材料組成,但不是模擬所關注的重點,將其簡化為各向同性均勻材料。當材料發生塑性變形時,均采用雙線性各項同性材料模型,其本構關系如下
if |ε|≤εs,σ=Eε,if |ε|≤εs,σ=[σs+E′(|ε|-εs)]signσs,
(1)
式中:σ為應力,ε為應變,σs為屈服應力,εs為屈服應變,E為楊氏模量,E′為強化楊氏模量。材料的參數如表1所示。

表1 某皮卡車的材料參數Table 1 Material parameters of a pickup truck
1.2 汽車對剛性墻碰撞數值模擬
汽車對剛性墻的碰撞模型如圖2所示,汽車以不同速度正面與剛性墻碰撞。采用ABAQUS/Explicit模擬汽車分別以36,54,72,90,108 km/h等5種初始速度碰撞剛性墻面的情況。圖3所示為汽車與剛性墻面碰撞典型時刻的變形。

圖2 皮卡車與剛性墻的碰撞模型Fig.2 Collision model of a truck colliding against a rigid wall

圖3 兩種不同速度下汽車與剛性墻碰撞典型時刻的變形Fig.3 Deformation of the pickup truck colliding against a rigid wall with different initial velocities at typical time


圖4 汽車以不同速度與剛性墻碰撞時的碰撞力位移曲線Fig.4 Collision force-displacement curves of the pickup truck colliding against a rigid wall
1.3 兩車相向碰撞數值模擬
兩車相向相撞是指兩輛相同的汽車以大小相同、方向相反的初始速度發生正面碰撞,模型如圖5所示。

圖5 兩車相向碰撞Fig.5 Collision between two trucks
初始速度仍然選擇36, 54, 72, 90, 108 km/h等5種速度。汽車的材料參數不變。典型初始速度下碰撞過程中典型時刻的變形如圖6所示。

圖6 典型速度下兩車相向碰撞過程中典型時刻的變形Fig.6 Deformation of trucks during collision with two different initial velocities at typical time

圖7 不同速度下兩車相向碰撞過程中碰撞力位移曲線Fig.7 Collision force-displacement curves during collision between two trucks with different initial velocities
2 基于BP神經網絡的代理模型
神經網絡是一種機器學習方法,其在對輸入數據進行學習和誤差修正的基礎上,建立一個基于數據的回歸模型[13]。人工神經網絡擁有多種不同結構,包括BP神經網絡、卷積神經網絡、循環神經網絡等。這里采用BP神經網絡,其具有分層結構,如圖8所示。BP神經網絡包括正向傳播和誤差的反向傳播兩個過程,其中正向傳播過程每一層的神經元從上一層接收數據,經過計算產生輸出數據,輸出到下一層神經元繼續處理,最后一層神經元輸出的是神經網絡最終的輸出值,而誤差的反向傳播主要是神經網絡的訓練算法,其目的在于對權值和閥值的調整,從而調整正向傳播中的計算誤差,使神經網絡達到最優[14]。

圖8 BP神經網絡結構Fig.8 BP neural network structure
2.1 構建代理模型
神經網絡的構建包括網絡設計、參數配置以及優化算法選擇。網絡設計包括輸入層、隱含層和輸出層,輸入層節點數應與輸入變量個數相同,輸出層節點數應與輸出變量個數保持一致。這里建立的汽車碰撞BP神經網絡結構中的隱含層包括3層神經元,每層128個節點。采用Dropout方法防止過擬合現象,Dropout原理是在前向傳播的時候,讓某個神經元的激活值以一定的概率停止工作,有利于增強模型的泛化能力,不會過于依賴某些局部特征。神經網絡的激活函數描述上層節點輸出和下層節點輸入之間關系的函數,對于識別率以及收斂速度都有顯著影響,這里采用了relu激活函數,relu函數不存在梯度消失問題,會使得模型的收斂速度維持在一個穩定的狀態。
神經網絡訓練的目的在于對權值和閥值的不斷調整,在保證模型精度的前提下,使模型進行盡可能多的訓練,直到模型的損失函數值達到收斂,誤差達到最小[16]。對訓練數據采用重采樣方法和K-Flod交叉驗證使數據充分學習并且得到驗證。
針對汽車與剛性墻壁碰撞和兩車相向碰撞問題,利用前述方法分別建立相應的代理模型,模型訓練的收斂性如圖9所示,可見,建立的兩個神經網絡模型均具有良好的收斂性。
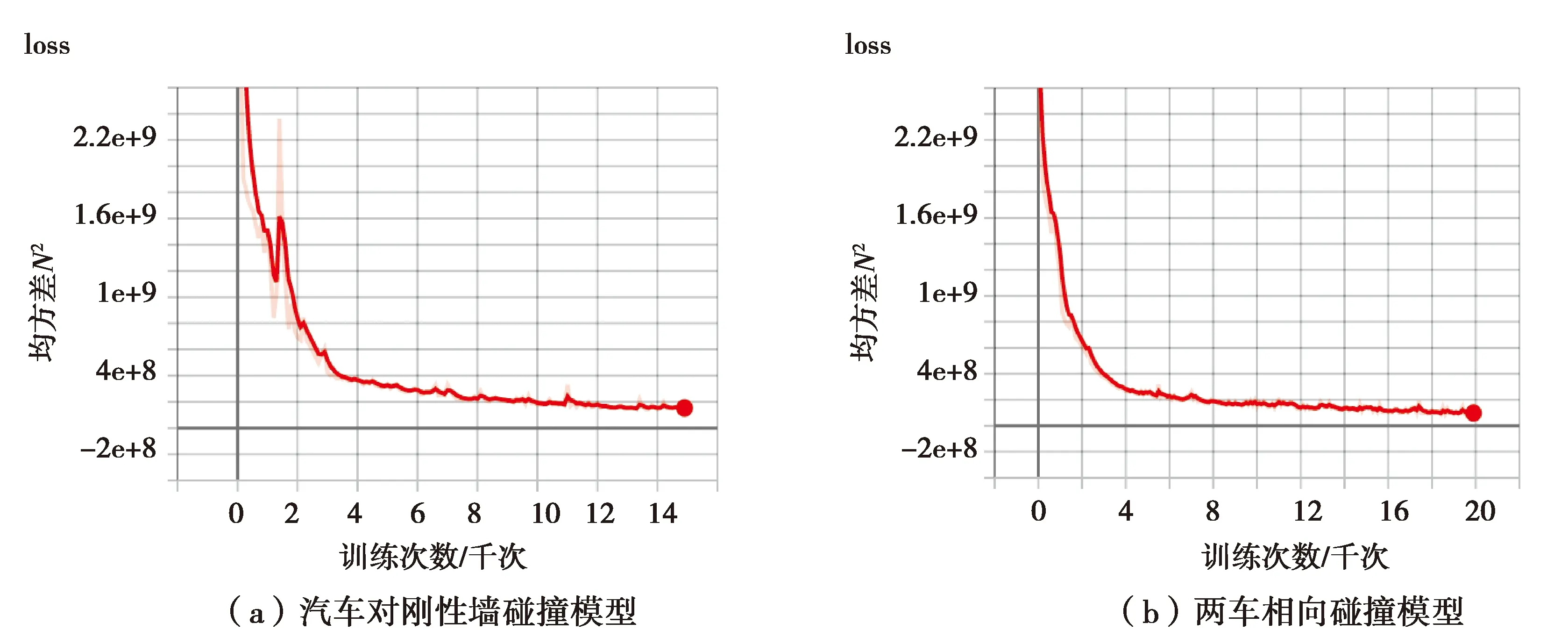
圖9 BP神經網絡模型訓練收斂性Fig.9 Training convergence of BP neural network models
2.2 代理模型性能分析

圖10 汽車碰撞代理模型預測及誤差Fig.10 Prediction by the surrogate model and its errors for collisions of a truck against a rigid wall and between two trucks at an initial velocity of 72km/h
值得一提的是,在建立該代理模型時,模擬的訓練樣本的參數選擇基于汽車設計規范的取值范圍,即對于該型汽車,設計中考慮的汽車發生碰撞的初始速度是在36~108 km/h范圍內,所以沒有討論該速度范圍以外模型的預測精度。
3 結 論
利用ABAQUS有限元軟件建立某皮卡車有限元模型,模擬在不同初始速度下汽車對剛性墻碰撞以及兩車相向碰撞的動態過程,基于數值模擬結果和BP神經網絡算法,建立了代理模型。得到如下結論:
2)針對汽車與剛性墻碰撞和兩車相向碰撞問題,基于數值模擬結果和BP神經網絡算法建立的代理模型合理。
3)得到的代理模型在給定的初始碰撞速度范圍36~108 km/h內具有足夠的預測精度。然而,由于沒有討論碰撞初始速度在該范圍之外的泛化能力,因此不能保證碰撞初始速度在該速度范圍之外的預測精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
機械工程師(2015年10期)2015-02-02 01:14:03
決策探索(2014年21期)2014-11-25 12:29:50
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18