我國林果振動(dòng)采收機(jī)發(fā)展應(yīng)用現(xiàn)狀與展望
2021-03-15 06:06:41林歡孫磊厚王二化
江蘇農(nóng)業(yè)科學(xué) 2021年1期
林歡 孫磊厚 王二化

摘要:林果產(chǎn)業(yè)是我國林業(yè)發(fā)展的重要組成部分,林果采收又是林果產(chǎn)業(yè)發(fā)展的重要標(biāo)志。國外對(duì)林果振動(dòng)采收的研究較早,相關(guān)采收裝置早已進(jìn)入應(yīng)用階段,國內(nèi)的振動(dòng)采收機(jī)發(fā)展較晚,相關(guān)研究比較缺乏。在采收機(jī)應(yīng)用研究方面,國外研制了樹干、樹枝和樹冠式振動(dòng)采收機(jī),并已形成種類廣泛的林果采收機(jī)體系;國內(nèi)針對(duì)干果類、鮮果類、漿果類林果研究開發(fā)了便攜式、履帶偏心式、液壓式等多種林果振動(dòng)采收機(jī),但仍處于試驗(yàn)研究階段未獲得廣泛應(yīng)用。隨著果園種植面積不斷擴(kuò)大,機(jī)械化作業(yè)成為必然趨勢,為了給機(jī)械化作業(yè)創(chuàng)造條件,我國急需推廣果園標(biāo)準(zhǔn)化種植及撫育模式,開發(fā)新型可靠的果實(shí)催熟技術(shù),推行振動(dòng)采收機(jī)模塊化組合模式和集成采收技術(shù)。
關(guān)鍵詞:林果;干果;鮮果;漿果;振動(dòng)采收機(jī)
中圖分類號(hào):S225.93文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1002-1302(2021)01-0036-07
作者簡介:林歡(1991—),女,江蘇徐州人,博士,講師,主要從事現(xiàn)代機(jī)械設(shè)計(jì)理論與方法研究。E-mail:huanlinphd@163.com。
我國是林果第一大生產(chǎn)國,林果種類豐富,主要分為干果和鮮果。林果采收作業(yè)是一項(xiàng)勞動(dòng)密集型和季節(jié)依賴性較強(qiáng)的工作,具有費(fèi)時(shí)、費(fèi)力等特點(diǎn),收獲作業(yè)中須要使用大量勞動(dòng)力和資金[1-2]。如果不能及時(shí)采收成熟的果實(shí),果實(shí)的品質(zhì)就會(huì)得不到保證,造成不必要的損失,機(jī)械采收逐漸成為最有效的林果采收方式。目前常用的林果采收設(shè)備多采用振動(dòng)的方式使果實(shí)掉落,能夠有效地解決人工采收成本過高等問題,適合我國的林果生產(chǎn)方式。
國外發(fā)達(dá)國家已經(jīng)利用機(jī)械化設(shè)備來采收林果,主要有氣力振動(dòng)采收機(jī)、撞擊振動(dòng)采收機(jī)、機(jī)械振動(dòng)采收機(jī)等,以機(jī)械振動(dòng)采收應(yīng)用最為廣泛,其收獲效率增加了4~9倍[3]。而我國大多數(shù)果園采用密植化種植模式,作業(yè)空間小,國外大型高效采收機(jī)具難以直接應(yīng)用于我國現(xiàn)有果園。因此,我國主要還是依靠人工的敲打、撿拾來進(jìn)行林果的采收,其費(fèi)用已經(jīng)占到了成本的一半以上[4-5]。林果的機(jī)械化采收作業(yè)已迫在眉睫,本研究針對(duì)干果類、鮮果類和漿果類中具有代表性的采收機(jī)進(jìn)行應(yīng)用現(xiàn)狀分析,以期為推廣林果的機(jī)械化采收提供一定的理論依據(jù)。
1振動(dòng)采收機(jī)制的研究
國外很早就對(duì)機(jī)械振動(dòng)采收機(jī)制進(jìn)行了研究,通過對(duì)曲柄滑塊式和偏心塊式振動(dòng)采收機(jī)的能量方程進(jìn)行研究,建立了由動(dòng)力阻尼系數(shù)、彈性系數(shù)、折算質(zhì)量組成的振動(dòng)系統(tǒng),得到了激振高度與振幅之間的關(guān)系[6]。Castro-Garcia等對(duì)受迫振動(dòng)下果樹自身所固有的參數(shù)特征進(jìn)行了研究,成為了機(jī)械振動(dòng)采收機(jī)的設(shè)計(jì)基礎(chǔ)。同時(shí),他們發(fā)現(xiàn)采收機(jī)的激振參數(shù)、機(jī)器的功率和冠層的尺寸參數(shù)均影響著振動(dòng)能量的傳遞和果實(shí)的采收效率[7-9]。
國內(nèi)進(jìn)行振動(dòng)采收機(jī)械理論方面的研究相對(duì)較遲,南京林業(yè)大學(xué)從2010年至今一直針對(duì)銀杏、棗、核桃等干果類果樹進(jìn)行研究,發(fā)現(xiàn)樹干全振幅與激振頻率成線性增大的趨勢,并且初步建立了整個(gè)系統(tǒng)的動(dòng)力學(xué)模型[10-11]。通過高速攝影儀研究發(fā)現(xiàn),激振能量在杏果樹各個(gè)分枝之間進(jìn)行傳遞的過程中,果枝的直徑大小、樹枝與樹干的夾角、分叉點(diǎn)位置等因素均影響能量波的傳遞特性[12]。近年來,針對(duì)海棠和葡萄果實(shí)采收效率和采收質(zhì)量的試驗(yàn)相繼探究了果樹機(jī)械采收的影響因素[13-14]。目前,利用高速旋轉(zhuǎn)的撥棒敲打沙棘、枸杞等小林果,使其從枝頭脫落的小林果采收機(jī)的機(jī)制研究日益成熟[15]。
針對(duì)振動(dòng)采收機(jī)制,國外從構(gòu)建振動(dòng)系統(tǒng)的動(dòng)力學(xué)模型,到振動(dòng)采收機(jī)、激振參數(shù)對(duì)果樹振動(dòng)響應(yīng)的關(guān)系均進(jìn)行了細(xì)致深入的研究與分析。國內(nèi)在國外研究的基礎(chǔ)上,對(duì)果枝果實(shí)振動(dòng)響應(yīng)、激振參數(shù)動(dòng)態(tài)傳遞特性等進(jìn)行了初步研究,基于振動(dòng)采摘機(jī)制設(shè)計(jì)了干果類、鮮果類和漿果類等不同類型的林果收獲機(jī)。
2干果類振動(dòng)采收機(jī)
2.1核桃采收機(jī)
國外很少針對(duì)核桃機(jī)械采收進(jìn)行專項(xiàng)研究,美國、加拿大等西方國家通過振動(dòng)落果機(jī)、清掃集條機(jī)和撿拾清選機(jī)的有效配合,能夠?qū)崿F(xiàn)核桃的振落、清掃、集中、撿拾、清選以及最后的裝箱運(yùn)輸[16]。
目前,國內(nèi)研究的核桃收獲機(jī)械主要有履帶式偏心核桃振動(dòng)采收機(jī)[17]、單軸單偏心和雙軸對(duì)稱偏心便攜式核桃收獲機(jī)[18]、曲柄連桿機(jī)械振動(dòng)式核桃采收裝置[19]、樹冠振動(dòng)式核桃采收裝置[20]和液壓驅(qū)動(dòng)偏心塊式核桃采摘機(jī)[21]。其中,履帶式偏心核桃振動(dòng)采收機(jī)的采凈率最高可達(dá)92.6%,但是需要人工進(jìn)行夾持伸縮(圖1)。單軸單偏心激振裝置的激振效果高于雙軸對(duì)稱偏心激振裝置,當(dāng)夾持高度約120cm,激振力為300~400kg時(shí),采凈率為85.2%~92.5%,采摘效率約為10棵/h。曲柄連桿機(jī)械振動(dòng)式核桃采收裝置具有振動(dòng)頻率高振幅低的特點(diǎn),樹冠振動(dòng)式核桃采收裝置對(duì)核桃的最大激振力為134N,此時(shí)振動(dòng)頻率為2Hz,所受最大慣性力為8.69N。液壓驅(qū)動(dòng)偏心塊式核桃采摘機(jī)的夾持高度可達(dá)120cm,當(dāng)液壓泵壓力高于4MPa時(shí),馬達(dá)轉(zhuǎn)動(dòng)速度可達(dá)700r/min,采收效率最高可達(dá)30棵/h。
2.2紅棗采收機(jī)
國外針對(duì)紅棗收獲機(jī)械的研究鮮見報(bào)道,韓國研制了一款全液壓自走式紅棗收獲機(jī),通過振動(dòng)樹冠來進(jìn)行紅棗采收,落果率可以高達(dá)95.8%[22]。但是,我國新疆紅棗采用矮化密植的種植模式,所以國外研制的機(jī)械并不能滿足我國紅棗的收獲需求。
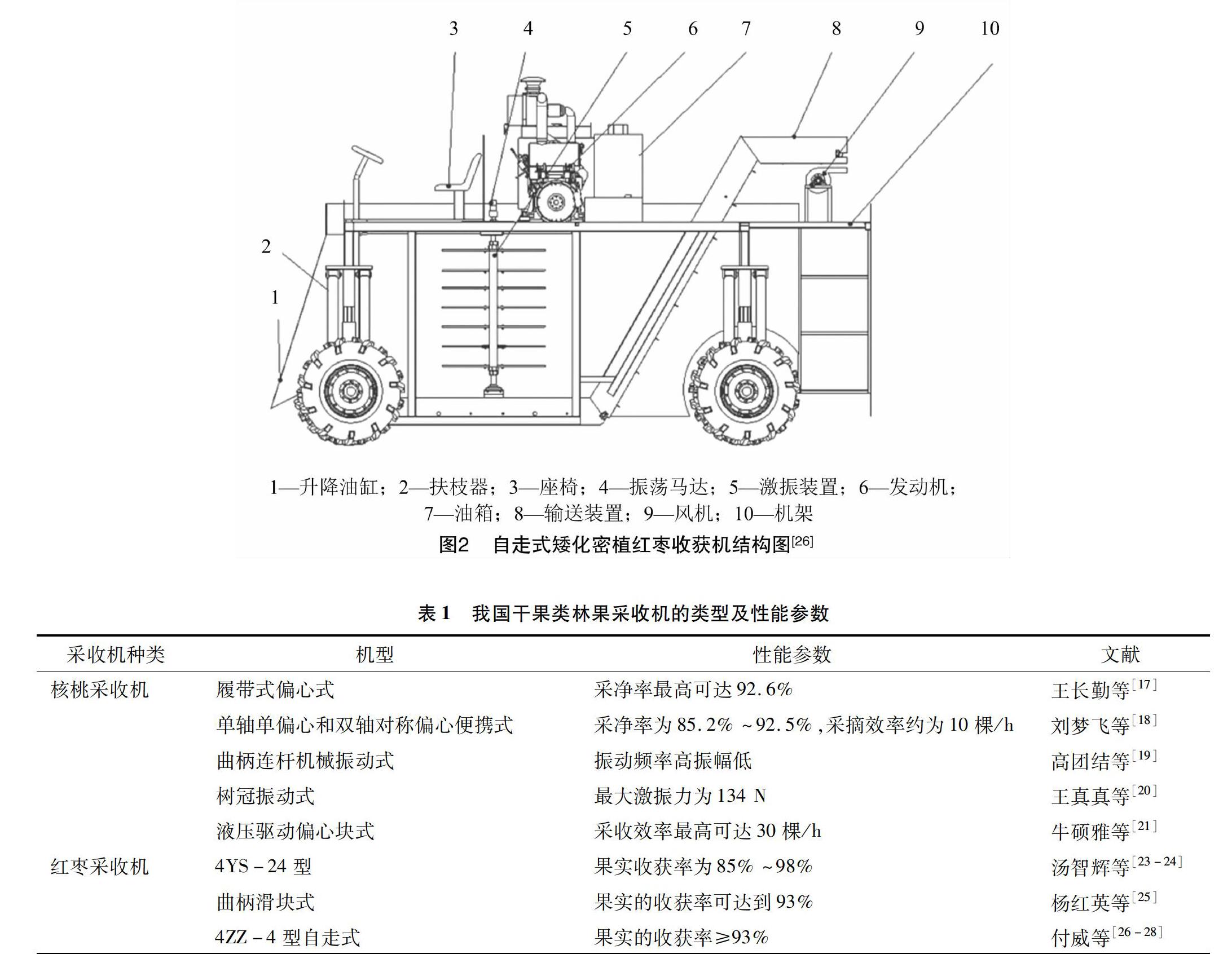
國內(nèi)研制的4YS-24型紅棗收獲機(jī)具有振幅小、頻率高、作業(yè)效率高的特點(diǎn),果實(shí)收獲率為85%~98%,可滿足空間較大稀疏果園的采收作業(yè)[23-24]。曲柄滑塊式紅棗采收裝置采用高頻、小振幅的樹冠振動(dòng)式進(jìn)行采收,利用倒傘狀裝置收集果實(shí),當(dāng)紅棗的含水率低于60%時(shí),以低于25Hz的頻率和0.014m的振幅進(jìn)行激振,果實(shí)的收獲率可達(dá)到93%[25]。針對(duì)新疆棗農(nóng)矮化密植和間作這2種種植模式,國內(nèi)還研制了4ZZ-4型基于樹冠振動(dòng)的自走式紅棗收獲機(jī),該收獲機(jī)采用斗式提升機(jī)作為傾斜輸送器,實(shí)現(xiàn)了紅棗的向上輸送[26-28],具體如圖2所示。
將以上干果類林果采收機(jī)的類型和性能參數(shù)匯總至表1,可以看出,國內(nèi)主要采用樹冠接觸式和樹干振動(dòng)式對(duì)干果類林果進(jìn)行采收,激振方式主要分為曲柄連桿式和偏心塊式,但與國外相比我國的采收機(jī)還處于試驗(yàn)研究階段,還不能實(shí)現(xiàn)集振動(dòng)采摘、運(yùn)輸、集果裝置于一體的機(jī)械化水平較高的集成采收技術(shù)。
3柑橘類振動(dòng)采收機(jī)
國外很早就對(duì)柑橘的機(jī)械化采收進(jìn)行了研究,通過振動(dòng)樹枝、樹干和樹冠進(jìn)行柑橘的收獲。其中,樹冠振動(dòng)式采收機(jī)又分為氣動(dòng)非接觸式和振動(dòng)桿接觸式,氣動(dòng)非接觸式采收機(jī)噪音大、能耗高,不適用于大規(guī)模的生產(chǎn)作業(yè)。美國Oxbo國際公司開發(fā)的振動(dòng)桿接觸式柑橘采收機(jī)采收效率高,已實(shí)現(xiàn)商業(yè)化應(yīng)用[29-30]。
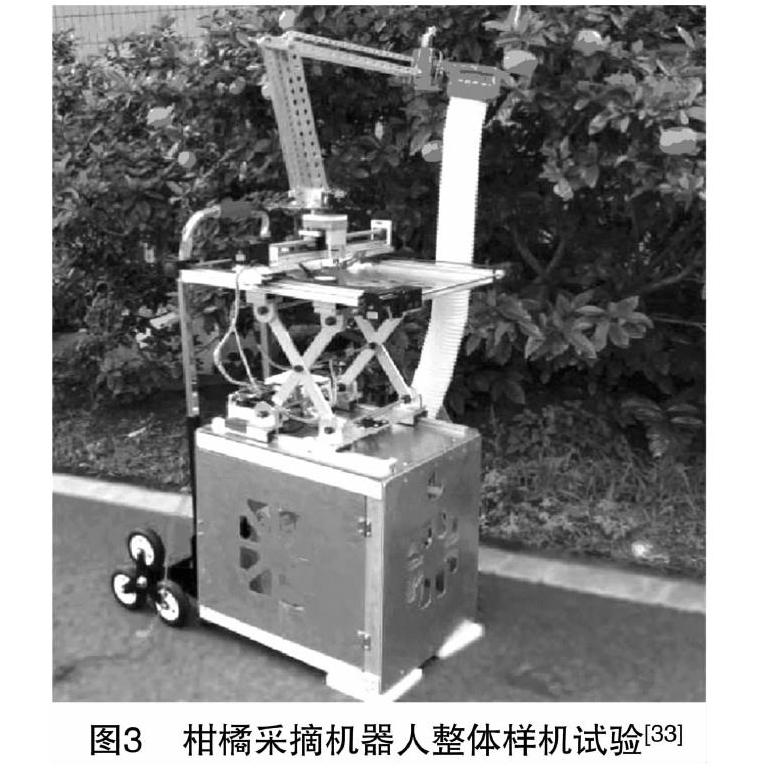
國內(nèi)基于接觸式原理研制了簡易的樹冠振動(dòng)收獲試驗(yàn)機(jī)和旋轉(zhuǎn)式柑橘采摘機(jī),簡易的樹冠振動(dòng)收獲試驗(yàn)機(jī)利用液壓馬達(dá)驅(qū)動(dòng)激振機(jī)構(gòu),當(dāng)激振頻率在4~7Hz范圍內(nèi)時(shí)機(jī)器運(yùn)行平穩(wěn),采收效果較好[31]。旋轉(zhuǎn)式柑橘采摘機(jī)利用主軸和采摘指棒對(duì)柑橘樹冠進(jìn)行攪動(dòng)從而使果實(shí)脫落,但是主要應(yīng)用于兩廣地區(qū)的砂糖橘采摘[32]。此外,我國還對(duì)柑橘采摘機(jī)器人進(jìn)行了研究,采摘速度可以達(dá)到5.4s/個(gè),最大采摘高度可達(dá)1.85m[33],具體如圖3所示。針對(duì)采摘機(jī)器人末端執(zhí)行器我國主要設(shè)計(jì)了梳剪采收末端執(zhí)行器和咬合式末端執(zhí)行器,二者均能有效地在切斷果柄的同時(shí)減少對(duì)果實(shí)的損傷,將果實(shí)采摘成功率提高至85%以上[34-36]。
將以上柑橘類采收機(jī)的類型和性能參數(shù)匯總至表2,可以看出柑橘類林果主要采用樹冠振動(dòng)式進(jìn)行收獲,國外的采收機(jī)能夠按照地形高低隨動(dòng),實(shí)現(xiàn)果實(shí)的分揀、清潔和收集,并且已實(shí)現(xiàn)商業(yè)化應(yīng)用。而我國的采收機(jī)還沒有獲得廣泛有效的應(yīng)用,同一種采收機(jī)只能采收特定的果實(shí),不能實(shí)現(xiàn)一機(jī)多用。此外,基于傳感器技術(shù)、機(jī)器視覺、圖像識(shí)別等技術(shù)的采摘機(jī)器人已經(jīng)被應(yīng)用到鮮果的采收作業(yè)中,但是采摘機(jī)器人的導(dǎo)航避障能力、作物信息篩選能力、爬坡行走能力、采摘效率等都有待提升。
4漿果類振動(dòng)采收機(jī)
4.1藍(lán)莓類采收機(jī)
美國的藍(lán)莓機(jī)械化采收水平最高,主要研制牽引式與自走式的采收機(jī),生產(chǎn)廠商主要有BEI、Littau、Korvan、AGHarvester和Oxbo[37-41]等公司。加拿大DBE公司生產(chǎn)的藍(lán)莓采收機(jī),由一個(gè)卷軸型式的采收頭安裝在拖拉機(jī)一則,并按照地形高低隨動(dòng),能夠?qū)崿F(xiàn)藍(lán)莓的分揀、清潔和收集[42]。
國內(nèi)針對(duì)藍(lán)莓機(jī)械化采收方面的研究相對(duì)較晚,目前處于發(fā)展階段,與發(fā)達(dá)國家相比有比較大的差距[43]。我國研制了梳齒式藍(lán)莓采摘機(jī)械手[44]、手推式藍(lán)莓采收機(jī)[45-46]、牽引式藍(lán)莓采收機(jī)[47-50]、自走式藍(lán)莓采收機(jī)[51]。手推式藍(lán)莓采收機(jī)適用于矮叢藍(lán)莓的機(jī)械化采收,操作簡單且制造成本較低,但是采摘機(jī)械的行走機(jī)構(gòu)還需要改進(jìn),故還處于試驗(yàn)階段,大規(guī)模批量生產(chǎn)仍需時(shí)日;牽引式藍(lán)莓采收機(jī)適合收獲半高叢、高叢的藍(lán)莓,GYL062牽引振動(dòng)式藍(lán)莓采摘機(jī)的龍門框架能夠跨過藍(lán)莓樹叢,片式梳刷以一定頻率和幅值反復(fù)擊打藍(lán)莓樹枝,使之產(chǎn)生相應(yīng)的受迫振動(dòng)(圖4)。機(jī)器的工作效率可以達(dá)到7.17kg/min,是人工采摘的10倍,未成熟果實(shí)的脫落率約為5.6%;自走式藍(lán)莓采收機(jī)的整機(jī)行駛速度范圍為0~11km/h,車架具有良好的升降性能,最高可達(dá)420mm的高度;極限越障高度為350~400mm,可滿足國內(nèi)機(jī)械采收藍(lán)莓使用要求。4.2沙棘和枸杞振動(dòng)采收機(jī)
沙棘可以用氣力式或振動(dòng)式進(jìn)行采收,俄羅斯研制了MⅡ70-6型氣吸式和后懸掛式沙棘采果機(jī),其日采收效率分別可達(dá)1000kg和1200kg左右,加拿大研制的自走式沙棘果振動(dòng)采收機(jī)采凈率高達(dá)90%以上,但均只適用于人工種植的大果沙棘園[52]。國外很少對(duì)枸杞的收獲機(jī)械進(jìn)行研究,僅有韓國設(shè)計(jì)了1款采收效率是人工采收4.2倍的枸杞振動(dòng)采收裝置,但并不適用于我國枸杞的種植模式和生長特性[53]。
國內(nèi)研制的機(jī)械振動(dòng)式沙棘采收機(jī)小巧輕便、工作適應(yīng)性強(qiáng),果實(shí)采凈率可達(dá)93%[54-55],具體如圖5所示。盧勇濤等改進(jìn)了沙棘采收機(jī)的振動(dòng)頭和果實(shí)收集裝置,其工作性能得到很大提高,果實(shí)采凈率提高至96%以上[56]。根據(jù)采收原理的不同,國內(nèi)主要有振動(dòng)式[57-58]、梳刷式[59]、剪切式[60]和氣流式[61]枸杞采收機(jī)。經(jīng)田間試驗(yàn)可知,振動(dòng)式采收機(jī)效率高損傷大,剪切式和梳刷式采收機(jī)效率低損傷小,氣流式采收機(jī)的氣源得不到穩(wěn)定的供應(yīng)導(dǎo)致其效率低下[62]。
由于我國枸杞種植模式大多為矮化密植,便攜梳刷振動(dòng)式枸杞采收機(jī)(圖6)成為枸杞機(jī)械化采收的趨勢,其熟果采收率可以達(dá)到89.12%,青果錯(cuò)采率與熟果破損率均小于10%[63-64]。
將以上漿果類林果采收機(jī)的類型和性能參數(shù)匯總至表3,可以看出,國外的漿果大多為人工果園種植,能夠利用自走式采收機(jī)對(duì)其進(jìn)行采收。而我國漿果以野生為主,分布在荒山、沙區(qū)等地形條件復(fù)雜的地區(qū),采收條件惡劣,且漿果果柄短容易損傷,現(xiàn)有采收機(jī)械大多為手持式工具,采收作業(yè)處于半手工、半機(jī)械化狀態(tài)。
5存在問題
5.1種植模式
為了實(shí)現(xiàn)果園的機(jī)械化作業(yè),國外果樹從種植至扶育修枝整個(gè)過程均為機(jī)械化作業(yè),留有足夠的作業(yè)空間,適合于采用大型作業(yè)設(shè)備。而矮化密植模式是我國一些林果的種植現(xiàn)狀,這樣的種植模式根本沒有給機(jī)械化采收留有空間。
5.2果實(shí)成熟度
林果振動(dòng)采收機(jī)進(jìn)行采收的關(guān)鍵技術(shù)是確定合適的振動(dòng)參數(shù),在獲得最大采凈率的同時(shí)減少對(duì)果樹的損傷。而同一棵果樹上果實(shí)成熟的時(shí)間存在一定差異,采用機(jī)械化采收時(shí)多批次采收會(huì)對(duì)果樹帶來損傷。
5.3振動(dòng)及采收裝置
干果類果實(shí)主要采用樹干振動(dòng)式進(jìn)行機(jī)械采收,與國外相比我國的林果采收機(jī)還處于試驗(yàn)研究階段,還不能實(shí)現(xiàn)集成采收作業(yè),商業(yè)化水平較低。
鮮果類果實(shí)無法直接采用高效的振動(dòng)式機(jī)械采收方法,主要利用樹冠振動(dòng)式和采摘機(jī)器人進(jìn)行采收作業(yè),采摘機(jī)器人的導(dǎo)航避障能力、作物信息篩選能力、爬坡行走能力、采摘效率等都有待提升。同時(shí),同一種采收機(jī)只能采收特定的果實(shí),不能實(shí)現(xiàn)一機(jī)多用。
針對(duì)漿果類林果,現(xiàn)有采收機(jī)械大多為手持式工具,采收作業(yè)處于半手工、半機(jī)械化狀態(tài)。
6發(fā)展展望
6.1標(biāo)準(zhǔn)化種植模式
無論是高枝株行距分明還是密植化種植,應(yīng)在全國推廣果園標(biāo)準(zhǔn)化種植模式,使果樹栽培標(biāo)準(zhǔn)化,為機(jī)械化采收提供條件,推動(dòng)林果采收機(jī)械的發(fā)展。
6.2果實(shí)催熟技術(shù)
為了提高采凈率,應(yīng)研究安全可靠的果實(shí)催熟技術(shù)對(duì)未成熟而又即將成熟的果實(shí)進(jìn)行催熟,促進(jìn)果實(shí)成熟的一致性,從而提高一次采凈率。
6.3集成采收技術(shù)
林果采收過程中振動(dòng)落果機(jī)、清掃集條機(jī)和撿拾清選機(jī)等機(jī)具協(xié)同作業(yè),實(shí)現(xiàn)振動(dòng)采摘、運(yùn)輸、集果等功能于一體的機(jī)械化水平較高的集成采收技術(shù)。
6.4一機(jī)多用采收裝置
針對(duì)林果種類多樣、果樹生長形態(tài)各異的特點(diǎn),可以模塊化設(shè)計(jì)激振裝置、夾持裝置及接載裝置來適應(yīng)不同果樹的需求。只需根據(jù)相應(yīng)的果樹類型,更換合適的模塊即可提高采收設(shè)備的利用率,降低成本,實(shí)現(xiàn)一機(jī)多用。
參考文獻(xiàn):
[1]SandersKF.Orangeharvestingsystemsreview[J].BiosystemsEngineering,2005,90(2):115-125.
[2]常有宏,呂曉蘭,藺經(jīng),等.我國果園機(jī)械化現(xiàn)狀與發(fā)展思路[J].中國農(nóng)機(jī)化學(xué)報(bào),2013,34(6):21-26.
[3]湯智輝,賈首星,沈從舉,等.新疆兵團(tuán)林果業(yè)機(jī)械化現(xiàn)狀與發(fā)展[J].農(nóng)機(jī)化研究,2008,40(11):5-8.
[4]王麗麗,郭艷玲,王迪,等.果蔬采摘機(jī)器人研究綜述[J].林業(yè)機(jī)械與木工設(shè)備,2009,37(1):10-11.
[5]梅松,肖宏儒,石志剛,等.基于往復(fù)振動(dòng)方法的枸杞低損采收技術(shù)裝備設(shè)計(jì)與試驗(yàn)[J].中國農(nóng)機(jī)化學(xué)報(bào),2019,40(11):100-105,208.
[6]LángZ.DynamicModelingstructureofafruittreeforinertialshakersystemdesign[J].BiosystemsEngineering,2006,93(1):35-44.
[7]Castro-GarcíaS,Blanco-RoldánGL,Gil-RibesJA,etal.Dynamicanalysisofolivetreesinintensiveorchardsunderforced[JP3]vibration[J].Trees-structureandFunction,2008,22(6):795-802.
[8]Castro-GarcíaS,Blanco-RoldánGL,Gil-RibesJA.Vibrationalandoperationalparametersinmechanicalconeharvestingofstonepine(PinuspineaL.)[J].BiosystemsEngineering,2012,112(4):352-358.
[9]Castro-GarcíaS,Castillo-RuizFJ,Jimenez-JimenezF,etal.SuitabilityofSpanish‘Manzanillatableoliveorchardsfortrunkshakerharvesting[J].BiosystemsEngineering,2015,129(1):388-395.
[10]王長勤,許林云,周宏平,等.偏心式林果振動(dòng)采收機(jī)的研制與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2012,28(16):10-16.
[11]王長勤.偏心式林果振動(dòng)采收機(jī)的設(shè)計(jì)及試驗(yàn)研究[D].南京:南京林業(yè)大學(xué),2012.
[12]瞿維,王春耀,王學(xué)農(nóng),等.受迫振動(dòng)下杏果實(shí)樹枝能量傳遞初探[J].西北農(nóng)林科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,42(7):223-227.
[13]范雷剛.果樹振動(dòng)采收影響機(jī)理的試驗(yàn)研究[D].烏魯木齊:新疆大學(xué),2017.
[14]楊蘭濤,王麗紅,坎雜,等.4PZ-1型自走式釀酒葡萄收獲機(jī)的研制與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2017,33(1):38-44.
[15]宋濤.小林果采收裝置撥棒與齒輪振動(dòng)耦合的模態(tài)分析[J].中國農(nóng)機(jī)化學(xué)報(bào),2019,40(5):17-21.
[16]王業(yè)成,陳海濤,林青.黑加侖采收裝置參數(shù)的優(yōu)化[J].農(nóng)業(yè)工程學(xué)報(bào),2009,25(3):79-83.
[17]王長勤,許林云,周宏平,等.基于PLC和MCGS的偏心式林果振動(dòng)采收機(jī)控制系統(tǒng)設(shè)計(jì)[J].農(nóng)機(jī)化研究,2013,35(3):79-83.
[18]劉夢飛,鄭甲紅,高警.采摘機(jī)-核桃樹系統(tǒng)的仿真與試驗(yàn)[J].食品與機(jī)械,2014,30(1):107-110.
[19]高團(tuán)結(jié),坎雜,馬俊貴,等.果園核桃機(jī)械化采收裝置的設(shè)計(jì)[J].中國農(nóng)機(jī)化學(xué)報(bào),2013,34(5):185-189.
[20]王真真,坎雜,付威,等.樹冠振動(dòng)式核桃采收裝置的設(shè)計(jì)與分析[J].農(nóng)機(jī)化研究,2016,38(8):56-59.
[21]牛碩雅,鄭甲紅,梁金生,等.液壓式核桃采摘機(jī)的設(shè)計(jì)與試驗(yàn)研究[J].農(nóng)機(jī)化研究,2015,37(8):124-127.
[22]LeeSW,HuhYK.Vibratoryharvestingmachineofboxthorn(LyciumchinenseMill)berries[J].TransactionsoftheASAE,2003,46(2):211-224.
[23]湯智輝,沈從舉,孟祥金,等.4YS-24型紅棗收獲機(jī)的研制[J].新疆農(nóng)機(jī)化,2010(1):30-32.
[24]孟祥金,湯智輝,沈從舉,等.4YS-24型紅棗收獲機(jī)[J].新疆農(nóng)機(jī)化,2013,20(1):13-14.
[25]楊紅英,坎雜,王麗紅,等.矮化密植紅棗采收裝置的設(shè)計(jì)[J].農(nóng)機(jī)化研究,2012,34(6):77-80.
[26]付威,楊紅英,王麗紅,等.4ZZ-4型自走式紅棗收獲機(jī)[J].湖南農(nóng)機(jī),2012,(5):68-69.
[27]付威,何榮,曲金麗,等.自走式矮化密植紅棗收獲機(jī)的設(shè)計(jì)[J].農(nóng)機(jī)化研究,2014,36(4):106-109.
[28]付威,崔健,張慧明,等.林果機(jī)械化采收技術(shù)研究及進(jìn)展[J].農(nóng)機(jī)化研究,2016,38(12):264-268.
[29]SavarySKJU,EhsaniR,SchuellerJK,etal.Simulationstudyofcitrustreecanopymotionduringharvestingusingacanopyshaker[J].TransactionsoftheASABE,2010,53(5):1373-1381.
[30]PuYJ,ToudeshkiA,EhsaniR,etal.Designandevaluationofatwo-sectioncanopyshakerwithvariablefrequencyformechanicalharvestingofcitrus[J].InternationalJournalofAgriculturalandBiologicalEngineering,2018,11(5):77-87.
[31]羅鋼,劉天湖,曾文,等.水果振動(dòng)收獲中樹干振動(dòng)的分析與仿真[J].機(jī)械設(shè)計(jì),2017,34(1):47-51.
[32]霍銀龍,王崇榮,張麗穎,等.全自動(dòng)旋轉(zhuǎn)式柑橘機(jī)械采摘機(jī)模型設(shè)計(jì)[J].南方農(nóng)機(jī),2018,49(16):27-28.
[33]劉靜,林沖,郭世財(cái).柑橘類水果采摘機(jī)器的設(shè)計(jì)與研究[J].包裝工程,2019,40(17):56-62.
[34]曾文,李康鎮(zhèn),劉天湖,等.柑橘梳剪采收末端執(zhí)行裝置設(shè)計(jì)[J].林業(yè)機(jī)械與木工設(shè)備,2019,47(9):9-13.
[35]王毅,許洪斌,張茂,等.仿蛇嘴咬合式柑橘采摘末端執(zhí)行器設(shè)計(jì)與實(shí)驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2018,49(10):61-71.
[36]王毅,付舜,張哲,等.柑橘采摘機(jī)器人末端執(zhí)行器設(shè)計(jì)與試驗(yàn)[J].中國農(nóng)業(yè)科技導(dǎo)報(bào),2018,20(1):69-77.
[37]YuPC,LiC,TakedaF,etal.Measurementofmechanicalimpactscreatedbyrotary,slapperslapper,andswayblueberrymechanicalharvesters[J].Computers&ElectronicsinAgriculture,2014,101(2):84-92.
[38]WhitingMD,WolfordSD,PetersonDL.Fresh-marketqualitytreefruitharvesterPartI:Sweetcherry[J].AppliedEngineeringinAgriculture,2003,19(5):539-544.
[39]SarigY.Roboticsoffruitharvesting:Astate-of-the-artreview[J].JournalofAgriculturalEngineeringResearch,1993,54(4):265-280.
[40]Erdo[KG-*5]g[DD(-1*2][HT6]ˇ[DD)]anD,GünerM,DursunE,etal.Mechanicalharvestingofapricots[J].BiosystemsEngineering,2003,85(1):19-28.
[41]StrikeB.BlueberryproductionandresearchtrendsinnorthAmerican[J].Agriculture,2006,715:173-184.
[42]霍強(qiáng).藍(lán)莓采摘車采摘系統(tǒng)及植株振動(dòng)模型仿真分析[D].哈爾濱:東北林業(yè)大學(xué),2013.
[43]劉紹金,盧煒樂.我國藍(lán)莓產(chǎn)業(yè)現(xiàn)狀和發(fā)展趨勢[J].現(xiàn)代園藝,2018(22):18.
[44]呂洋.梳齒式藍(lán)莓采摘機(jī)械手的設(shè)計(jì)與實(shí)驗(yàn)研究[D].大慶:黑龍江八一農(nóng)墾大學(xué),2018.
[45]郭艷玲,鮑玉冬,何培莊,等.手推式矮叢藍(lán)莓采摘機(jī)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2012,28(7):40-45.
[46]關(guān)慷慨,劉維,陳雪,等.矮叢藍(lán)莓采摘機(jī)的機(jī)械結(jié)構(gòu)設(shè)計(jì)[J].吉林化工學(xué)院學(xué)報(bào),2017,11(11):50-53.
[47]耿雷,郭艷玲,王海濱.高叢藍(lán)莓采摘機(jī)采摘系統(tǒng)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(3):67-74,81.
[48]趙玉龍.藍(lán)莓采摘機(jī)虛擬樣機(jī)設(shè)計(jì)[D].哈爾濱:哈爾濱商業(yè)大學(xué),2014.
[49]鮑玉冬,李志鵬,郭艷玲,等.振動(dòng)式藍(lán)莓采摘機(jī)對(duì)果實(shí)收獲的影響試驗(yàn)[J].湖南農(nóng)業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,40(1):96-100.
[50]王景巍,王海濱,李志鵬,等.振動(dòng)式藍(lán)莓采摘機(jī)槽型凸輪傳動(dòng)裝置的設(shè)計(jì)與分析[J].東北林業(yè)大學(xué)學(xué)報(bào),2017,10(10):88-93.
[51]梁釗.藍(lán)莓采收機(jī)自行走裝置的設(shè)計(jì)及性能研究[D].哈爾濱:哈爾濱理工大學(xué),2019.
[52]曹肆林,何義川,王敏,等.沙棘果機(jī)械化采收技術(shù)的研究現(xiàn)狀與思考[J].農(nóng)機(jī)化研究,2012,34(5):12-15.
[53]SoJD.Vibratoryharvestingmachineforboxthorn(Lyciumchinense[JP3]Mill.)berries[J].TransactionsoftheASAE,2003,46(2):211-221.
[54]王敏,曹肆林,何義川,等.機(jī)械振動(dòng)式沙棘采收機(jī)的設(shè)計(jì)[J].農(nóng)機(jī)化研究,2013,35(1):109-111.
[55]王敏,曹肆林,何義川,等.機(jī)械振動(dòng)式沙棘采收機(jī)的試驗(yàn)研究[J].農(nóng)機(jī)化研究,2013,35(9):202-208.
[56]盧勇濤,王敏,曹肆林,等.機(jī)械振動(dòng)式沙棘采收機(jī)的改進(jìn)[J].湖北農(nóng)業(yè)科學(xué),2016,55(10):2649-2651.
[57]張最,肖宏儒,丁文芹,等.振動(dòng)式枸杞采摘機(jī)理仿真分析與樣機(jī)試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2015,31(10):20-28.
[58]張文強(qiáng),張明明,張俊雄,等.振搖枸杞采收機(jī)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2018,49(7):97-102.
[59]張文強(qiáng),李召召,譚豫之,等.變間距梳刷式枸杞采收裝置優(yōu)化設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2018,49(8):83-90.
[60]趙金魚.一種枸杞采摘頭:201410807305.3[P].2014-12-23.
[61]張換高,徐博豪,周一笛,等.一種氣吸式枸杞采摘機(jī):201320129765.6[P].2013-03-21.
[62]宋志禹,梅松,肖宏儒,等.枸杞采收方法對(duì)比試驗(yàn)與分析[J].中國農(nóng)機(jī)化學(xué)報(bào),2019,40(10):110-116.
[63]趙健,陳云,王亞磊,等.便攜式枸杞振動(dòng)采收裝置參數(shù)優(yōu)化試驗(yàn)研究[J].農(nóng)機(jī)化研究,2019,41(3):176-182.
[64]陳軍,趙健,陳云,等.振刷式枸杞采收機(jī)設(shè)計(jì)與試驗(yàn)優(yōu)化[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2019,50(1):152-161,95.