全捷聯(lián)導(dǎo)引頭寄生回路穩(wěn)定裕度分析及校正網(wǎng)絡(luò)設(shè)計*
2021-03-24 03:13:40楊泗智
火力與指揮控制 2021年2期
楊泗智
(西北工業(yè)大學(xué)航天學(xué)院,西安 710072)
0 引言
相對于傳統(tǒng)平臺式導(dǎo)引頭,全捷聯(lián)導(dǎo)引頭用數(shù)學(xué)平臺隔離彈體擾動,并從中提取出視線角速度[1]。全捷聯(lián)導(dǎo)引頭在提取視線角速度的過程中,需要同時利用導(dǎo)引頭量測的誤差角信息和彈上慣導(dǎo)系統(tǒng)量測的彈體姿態(tài)角信息,當探測器與慣性器件輸出信息的刻度尺或動力學(xué)不一致時,將會使補償后的視線角存在一定的誤差,該誤差在制導(dǎo)系統(tǒng)中增加了寄生回路,影響制導(dǎo)系統(tǒng)數(shù)學(xué)平臺的隔離度,同時該寄生回路對全捷聯(lián)制導(dǎo)系統(tǒng)的穩(wěn)定性和有效導(dǎo)航比會有顯著影響[2-3]。
目前國內(nèi)外學(xué)者在寄生回路對制導(dǎo)控制系統(tǒng)的穩(wěn)定性和制導(dǎo)精度影響方面的研究已經(jīng)做了大量工作,如:王嘉鑫等[4]利用李雅普諾夫函數(shù)法分析了制導(dǎo)系統(tǒng)的一致漸進穩(wěn)定條件,研究了隔離度對比例導(dǎo)引制導(dǎo)穩(wěn)定性的影響。李富貴等[5-6]采用勞斯判據(jù)和系數(shù)凍結(jié)法研究了剩余飛行時間、制導(dǎo)參數(shù)、刻度尺偏差對制導(dǎo)穩(wěn)定性的影響,利用伴隨函數(shù)法研究了刻度尺偏差對脫靶量的影響。鄢琴濤等建立了引入末制導(dǎo)回路的隔離度寄生回路模型,得出了基于不同末制導(dǎo)剩余時間下的隔離度臨界幅值。針對常用誤差模型下隔離度正反饋幅值的影響,提出了一種引入制導(dǎo)回路的末制導(dǎo)剩余時間值的計算方法[7]。
綜上,在寄生回路分析方面,目前主要集中在制導(dǎo)控制系統(tǒng)的穩(wěn)定性和制導(dǎo)精度影響方面展開研究,而對于寄生回路本身的穩(wěn)定裕度分析以及其校正控制方面未見相關(guān)研究。
本文在頻域內(nèi)分析了刻度尺誤差和動力學(xué)延時對寄生回路穩(wěn)定性的影響,利用幅相裕度確定寄生回路的刻度尺誤差和動力學(xué)延時允許的變化范圍,在時域內(nèi)對邊界條件進行了驗證,同時分析了刻度尺誤差對有效導(dǎo)航比的影響。當寄生回路的參數(shù)不能滿足穩(wěn)定性要求時,利用超前校正網(wǎng)絡(luò)進行補償設(shè)計,通過校正網(wǎng)絡(luò)保證寄生回路的穩(wěn)定裕度,在滿足穩(wěn)定裕度的基礎(chǔ)上,通過調(diào)整增益補償寄生回路和校正網(wǎng)絡(luò)參數(shù)對有效導(dǎo)航比的影響,使其滿足制導(dǎo)系統(tǒng)穩(wěn)定性和比例導(dǎo)引系統(tǒng)的要求。
1 寄生回路模型分析

圖1 全捷連導(dǎo)引頭制導(dǎo)控制回路
其中,Vc為彈目接近速度,tgo為剩余飛行時間,Tf為濾波器時間常數(shù),N 為導(dǎo)航比,Tm為彈體震蕩周期,μm為彈體運動阻尼系數(shù),Ta為攻角時間常數(shù)。由于探測器的光電測量裝置的速度非常快,其動力學(xué)滯后可以忽略,同時探測器的輸出與視線角成線性關(guān)系,因此,在制導(dǎo)回路中可以不考慮捷聯(lián)探測器的動力學(xué)延時,可以令Gs(s)=1。而對角速率陀螺要考慮動力學(xué)延時的影響,同時由于探測器和角速率陀螺在測量過程中存在刻度尺誤差,造成數(shù)學(xué)平臺不能夠完全補償彈體擾動,從而構(gòu)成寄生回路。在不考慮噪聲的情況下,綜合彈體擾動和角速率陀螺補償及探測器的傳遞函數(shù),對制導(dǎo)控制回路進行簡化得到寄生回路的模型如圖2 所示。

圖2 寄生回路結(jié)構(gòu)圖
由于1-Gg(s)的傳遞函數(shù)主要由陀螺與探測器的刻度尺誤差和動力學(xué)延時構(gòu)成,可以令
為了對寄生回路的穩(wěn)定性進行分析,這里主要在頻域內(nèi)研究,在頻域內(nèi)當由n 個環(huán)節(jié)串聯(lián)時,可以得到開環(huán)傳遞函數(shù)為:

其中,對數(shù)的復(fù)頻特性為:
對于全捷連導(dǎo)引頭采用角速率陀螺進行反饋,捷聯(lián)導(dǎo)引頭探測器的傳遞函數(shù)用Gs(s)表示,角速率反饋系統(tǒng)的傳遞函數(shù)用Gg(s)表示,采用比例導(dǎo)引控制的全捷聯(lián)制導(dǎo)控制系統(tǒng)的原理如圖1 所示。
對數(shù)的相頻特性為:

2 寄生回路穩(wěn)定性分析
寄生回路的開環(huán)傳遞函數(shù)為:

開環(huán)傳遞函數(shù)的幅值函數(shù)和相位函數(shù)分別為:

由式(7)和式(8)可以看出:在彈體動力學(xué)和導(dǎo)航比參數(shù)確定的情況下,寄生回路的穩(wěn)定性及其裕度主要由刻度尺誤差Kp和動力學(xué)延時決定,并且相互獨立。
制導(dǎo)控制參數(shù)的取值如表1 所示:
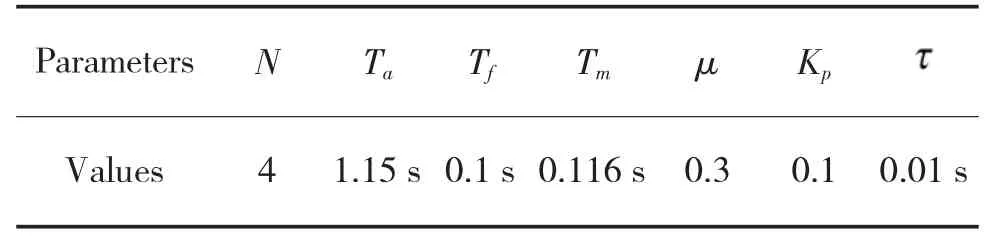
表1 寄生回路參數(shù)取值
在頻域內(nèi)利用bode 圖可以得到寄生回路開環(huán)系統(tǒng)的幅值和相位隨頻率的變化曲線如圖3 所示。可以看出寄生回路是穩(wěn)定的,其中剪切頻率為ωCR=19 rad/s,穿越頻率ωg=37.8 rad/s,幅值裕度:Gm=12.4 dB,相角裕度:φm=33.2°。
2.1 頻域內(nèi)寄生回路的穩(wěn)定性分析
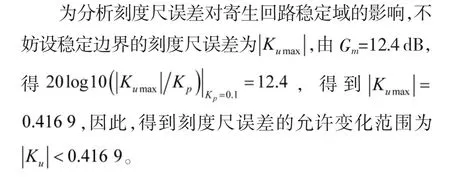
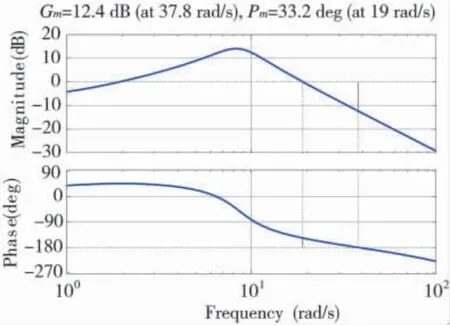
圖3 寄生回路開環(huán)傳遞函數(shù)的bode 圖

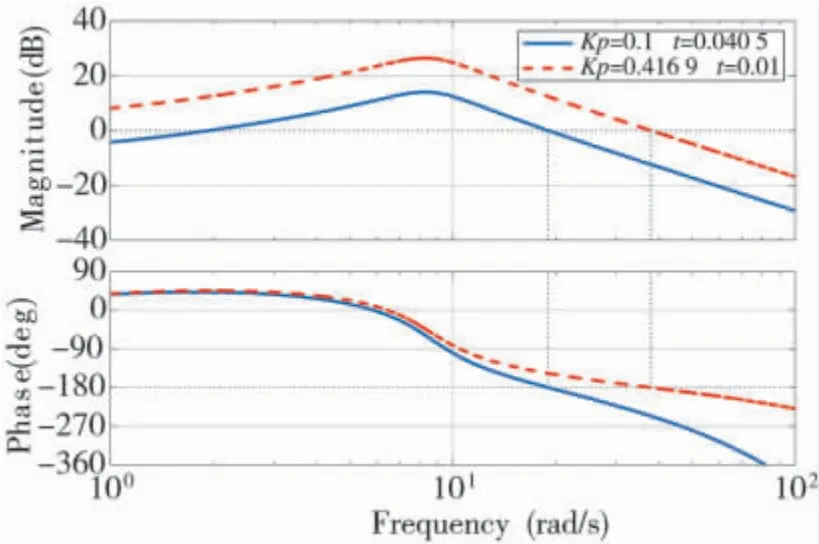
圖4 刻度尺誤差和動力學(xué)延時邊界狀態(tài)的bode 圖
由圖4 可以看出,刻度尺誤差和動力學(xué)延時處于邊界時寄生回路處于臨界穩(wěn)定狀態(tài)。
2.2 時域內(nèi)寄生回路穩(wěn)定邊界的驗證
當刻度尺誤差和動力學(xué)延時處于邊界狀態(tài)時,在時域內(nèi)對寄生回路閉環(huán)系統(tǒng)進行仿真,可以得到階躍響應(yīng)曲線如圖5 所示:

圖5 邊界狀態(tài)的單位階躍響應(yīng)函數(shù)
由圖5 可以看出,當刻度尺誤差或動力學(xué)延時處于臨界穩(wěn)定邊界時,單位階躍響應(yīng)也處于臨界穩(wěn)定狀態(tài),驗證了刻度尺誤差和系統(tǒng)延時臨界值的正確性,同時也可以看出刻度尺誤差同時影響制導(dǎo)控制回路的穩(wěn)態(tài)誤差。
3 寄生回路對有效導(dǎo)航比的影響
為了分析寄生回路對導(dǎo)航比的影響,對寄生回路引起的制導(dǎo)控制系統(tǒng)的穩(wěn)態(tài)特性進行分析,得到控制過載與視線角變化率的傳遞函數(shù)如下:
由式(11)可知:對于負反饋時有效導(dǎo)航比小于比例導(dǎo)引系數(shù),正反饋時有效導(dǎo)航比大于比例導(dǎo)引系數(shù),刻度尺誤差對導(dǎo)航比有影響,因此,在選擇導(dǎo)航比的時候要考慮刻度尺誤差的影響,在控制系統(tǒng)設(shè)計時需要對其進行補償。
4 增加超前校正網(wǎng)絡(luò)+增益控制
為了補償寄生回路對制導(dǎo)控制系統(tǒng)的影響,這里采用超前校正網(wǎng)絡(luò)+增益控制。增加校正網(wǎng)絡(luò)+增益控制后的制導(dǎo)控制回路如圖6 所示:

圖6 增加校正網(wǎng)絡(luò)+增益控制的制導(dǎo)控制回路
其中,超前校正網(wǎng)絡(luò)傳遞函數(shù)為:

α 稱為分度系數(shù),T 為時間常數(shù),根據(jù)超前校正網(wǎng)絡(luò)的性質(zhì)可以得到最大超前角頻率為:

最大超前角為:

為使有效導(dǎo)航比與比例導(dǎo)引系數(shù)一致,需要進行增益調(diào)節(jié)。根據(jù)式(10)可知,增加校正網(wǎng)絡(luò)和增益控制后的系統(tǒng)穩(wěn)態(tài)值為:

為分析方便這里按照幅值裕度:Gm≥10 dB,相角裕度:φm≥30°對兩種穩(wěn)定邊界值進行設(shè)計。
1)當Kp=0.416 9,=0.01 s 時,其中剪切頻率為ωCR=37.8 rad/s,為了滿足幅值和相位裕度的要求,令φm≥35°,根據(jù)式(14)算得α=3.690 4。令ωm=ωCR,由式(13)算得:T=0.013 8 s,令Kc=1,校正剪切頻率為ωCR=24.5 rad/s,幅值裕度為13.9 dB,相角裕度為52.3°,通過超前校正網(wǎng)絡(luò)補償滿足穩(wěn)定裕度要求。增加校正網(wǎng)絡(luò)前后的伯德圖變化如圖7 所示:

圖7 校正網(wǎng)絡(luò)補償刻度尺誤差的伯德圖
同時,由式(15)得到增益值:K=5.358,寄生回路在校正網(wǎng)絡(luò)+增益控制和無補償控制及與無寄生回路影響的比例導(dǎo)引控制,在單位階躍響應(yīng)條件下的對比如圖8 所示:
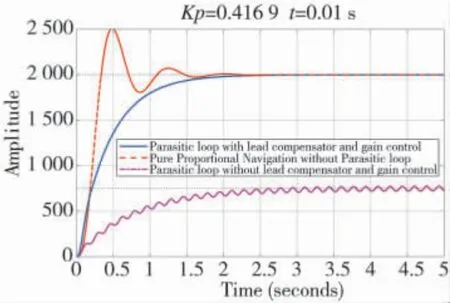
圖8 刻度尺誤差條件下校正網(wǎng)絡(luò)+增益控制與其他狀態(tài)的對比
圖8 可以看出通過增加校正網(wǎng)絡(luò)+ 增益控制可以滿足穩(wěn)定度要求,同時有效導(dǎo)航比與比例導(dǎo)引控制一致,可以消除寄生回路刻度尺誤差對制導(dǎo)控制系統(tǒng)的影響。
2)當Kp=0.1,=0.040 5 s 時,根據(jù)前面的分析取α=3.690 4,由穿越頻率ωg=19 rad/s,令ωm=ωg,可以得到T=0.027 4s,令Kc=1,校正后穿越頻率為ωg=10.901 8 rad/s,相角裕度為86.99°,幅值裕度為14.6 dB,滿足穩(wěn)定裕度要求,增加校正網(wǎng)絡(luò)前后的伯德圖變化如圖9 所示。

圖9 動力學(xué)延時補償校正網(wǎng)絡(luò)伯德圖
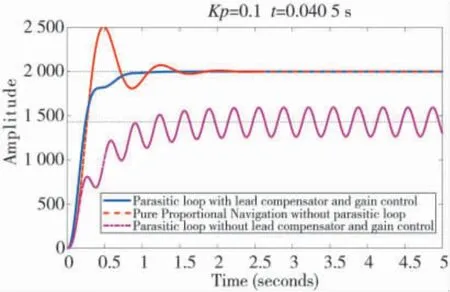
圖10 動力學(xué)延時條件下校正網(wǎng)絡(luò)+增益控制與其他狀態(tài)的對比
同樣由式(15)得到增益值:K=4.090 4,寄生回路在校正網(wǎng)絡(luò)+增益控制和無補償控制及與無寄生回路影響的比例導(dǎo)引控制在單位階躍響應(yīng)條件下的對比如圖10 所示。
圖10 可以看出,通過增加校正網(wǎng)絡(luò)+增益控制滿足穩(wěn)定度,要求同時有效導(dǎo)航比與比例導(dǎo)引控制一致,可以消除寄生回路動力學(xué)延時對制導(dǎo)控制系統(tǒng)的影響。
對于刻度尺誤差和動力學(xué)延時同時超出臨界值的不穩(wěn)定狀態(tài)采用同樣的處理可以進行校正,從而將寄生回路引起不穩(wěn)定系統(tǒng)校正為穩(wěn)定系統(tǒng),同時通過增益控制滿足比例導(dǎo)引系統(tǒng)有效導(dǎo)航比的要求。
5 結(jié)論
本文通過對捷聯(lián)導(dǎo)引頭制導(dǎo)控制回路的模型分析,建立了寄生回路的數(shù)學(xué)模型及其簡化形式,在頻域內(nèi)利用幅值和相角裕度計算出寄生回路的刻度尺誤差和動力學(xué)延時允許的變化范圍,在時域內(nèi)對邊界條件進行了驗證,驗證了邊界條件即為寄生回路的臨界穩(wěn)定狀態(tài)。分析了刻度尺誤差對有效導(dǎo)航比的影響,得到在穩(wěn)態(tài)條件下負反饋有效導(dǎo)航比小于比例導(dǎo)引系數(shù),正反饋有效導(dǎo)航比大于比例導(dǎo)引系數(shù)。當寄生回路的參數(shù)不能夠滿足穩(wěn)定裕度要求時,利用超前校正網(wǎng)絡(luò)+增益控制進行補償設(shè)計,通過校正網(wǎng)絡(luò)設(shè)計保證寄生回路的穩(wěn)定裕度,同時通過增益控制補償寄生回路開環(huán)增益對有效導(dǎo)航比的影響,使其滿足制導(dǎo)系統(tǒng)穩(wěn)定裕度和比例導(dǎo)引系統(tǒng)的要求。