基于一種單向滑模的某巡飛彈過載控制仿真
2021-03-24 03:13:42王澤璞梁建輝梁美美
火力與指揮控制 2021年2期
馬 越,傅 健,王澤璞,梁建輝,梁美美
(1.北方自動控制技術研究所,太原 030006;2.南京理工大學,南京 210094)
0 引言
巡飛彈是無人機技術和智能彈藥技術相結合的產物,它與常規彈藥相比,具有在戰場上空巡飛的能力,能夠完成偵察監視、目標威脅、壓制摧毀等任務,同時具有造價便宜,效費比高的特點,是我國新型武器裝備發展的重要趨勢[1-3]。
巡飛彈在飛行過程中會受到風、自身裝配誤差等不確定因素的干擾,使飛行器產生較大的角速度,這就對巡飛彈的飛控系統有較強性能要求。而滑模系統對控制對象的參數變化和系統的外界干擾無關,又具有較強的魯棒性[4-7],因此,廣泛地應用于飛行器的控制系統中。本文以某巡飛彈為研究對象,將法向過載作為控制量,采用一種單向滑模理論設計了控制器,與傳統的滑模控制方法進行了對比,仿真結果顯示該單向滑模控制方法可以很好地抑制抖振,控制效果優于普通滑模控制器。
1 飛行動力學模型
為了簡化計算,在六自由度剛體彈道模型的基礎上進行簡化[8-9],經推導得到巡飛彈的縱向簡化模型如式(1),其中各符號含義參考文獻[8]。

2 普通滑模控制器設計
本節采用過載加角速度反饋來設計控制器。設計滑模變結構控制的滑模面如下:





將式(6)、式(7)帶入式(3)中,整理后得


由巡飛彈縱向動力學模型能夠推出角速度與過載的關系如下:

式中


整理后可得系統滑動模態特征方程為

特征方程的根與c1有關,為保證系統穩定性,利用勞斯判據可以得出有關c1的不等式。通過調整c1來移動滑動模態極點,可以改善系統動態特性。
3 單向滑模控制器設計
在實際工程應用中,由于系統存在慣性、控制時滯等原因,系統狀態會在切換面上來回穿越,這樣就產生劇烈的抖振現象。為了抑制抖振,下面采用一種單向滑模控制方法設計新的控制器。
單向滑模由2 個切換面s1i,s2i和4 個輔助滑模面h0i,h1i,h2i,h3i組成。如圖1 所示。當系統狀態在切換面上運動時,可以在2 個切換面和4 個單向輔助滑模面共同作用下趨向于原點,不會在切換面上產生高頻率的來回穿越,從而達到去抖振的效果,因此,該方法被稱為單向滑模[10-12]。

圖1 單向滑膜控制趨近示意圖
按照以上理論,選擇如下的組合切換面:

圖2 單向輔助滑模子空間
在圖中取適當的點滿足


由式(6),式(7)得到控制器表達式:
下面給出其穩定性的證明。取系統的Lyapunov函數為


圖3 M0-H0=0 直線位置圖
4 仿真結果分析

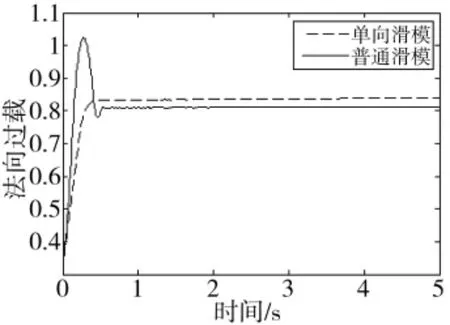
圖4 兩種控制系統法向過載輸出

圖5 普通滑模控制舵偏角輸出

圖6 單向滑模控制舵偏角輸出
從圖4 中可以看出,兩種滑模變結構控制器都可以很好地跟蹤調節系統法向過載的變化,最終使航彈的過載基本達到期望值。普通滑模控制過載曲線穩定在0.8 附近,大約為0.81。過渡過程時間約為ts=0.54 s,最大超調量Mp=26.1%。過渡過程品質較為良好。不足之處是存在一定的靜差。單向滑模控制的過載輸出穩定在0.83 附近,過渡過程時間大約為ts=0.48 s,幾乎沒有超調,過渡過程品質非常良好,但同樣存在靜差。由圖5 可以看出,升降舵偏角的變化曲線上疊加了一個鋸齒形的軌跡,這就是普通滑模控制器的抖振現象,這會導致控制系統性能變差,影響巡飛彈系統穩定性。從圖6 可以看出單向滑模控制的舵偏角輸出在起始的0.3 s 內有劇烈的抖振,隨后升降舵偏角的變化曲線變得平緩光滑,抖振現象得到了明顯的抑制。
5 結論
從仿真結果來看,這兩種控制方法都可以比較好地跟蹤和調節航彈的法向過載,使其達到要求的數值。兩種控制方法都有一定的偏差。單向輔助面滑模控制方法與普通滑模控制方法相比,過載控制量存在4%左右的偏差,但是其震蕩次數較少,收斂速度也較快,并且控制器抖振現象得到了明顯的抑制。所以這種單向輔助面滑模控制在飛行控制中具有較好的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12