基于多源傳感器的單星定位算法與精度分析
2021-03-24 03:13:16鄧彥鑫李柯陶
火力與指揮控制 2021年2期
鄧彥鑫,郭 偉,李柯陶
(中國(guó)航空無(wú)線(xiàn)電電子研究所,上海 200241)
0 引言
全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite Systems,GNSS)憑借其高精度、應(yīng)用便捷、覆蓋范圍廣且全天候全天時(shí)服務(wù)等諸多優(yōu)勢(shì)成為目前性?xún)r(jià)比最高、應(yīng)用領(lǐng)域最廣的定位導(dǎo)航授時(shí)系統(tǒng)[1]。但其存在一個(gè)重大的問(wèn)題,就是衛(wèi)星信號(hào)的羸弱性。衛(wèi)星信號(hào)從幾萬(wàn)公里的太空傳到地球表面,信號(hào)極易受到干擾,遮蔽和欺騙。當(dāng)衛(wèi)星信號(hào)由于受到建筑物,山體等遮擋而導(dǎo)致接收機(jī)接收到的衛(wèi)星空間分布不好甚至衛(wèi)星數(shù)少于4 顆時(shí),衛(wèi)星導(dǎo)航接收機(jī)將無(wú)法提供實(shí)時(shí)定位。或在極端戰(zhàn)爭(zhēng)時(shí)期,GNSS 可被各式反衛(wèi)星技術(shù)輕易破壞或摧毀而失效,應(yīng)急響應(yīng)發(fā)射備用衛(wèi)星時(shí),往往很難同時(shí)發(fā)射4 顆及以上數(shù)量的衛(wèi)星并完成快速組網(wǎng)提供服務(wù)。此外衛(wèi)星空間載荷異常、地面控制端出現(xiàn)故障等也可能造成GNSS 的定位,導(dǎo)航和授時(shí)(Positioning,Navigation and Timing,PNT)服務(wù)中斷。因此,實(shí)現(xiàn)可見(jiàn)衛(wèi)星數(shù)目不足時(shí)的應(yīng)急定位至關(guān)重要,國(guó)內(nèi)外的諸多學(xué)者針對(duì)該問(wèn)題,提出采用單星定位系統(tǒng)作為衛(wèi)星導(dǎo)航星座拒止服務(wù)環(huán)境下的應(yīng)急響應(yīng)系統(tǒng),采用大橢圓軌道并在軌道遠(yuǎn)地點(diǎn)為用戶(hù)提供定位服務(wù),以滿(mǎn)足長(zhǎng)時(shí)間服務(wù)的要求,而在近地點(diǎn)衛(wèi)星會(huì)快速通過(guò)非服務(wù)區(qū)[2]。對(duì)國(guó)內(nèi)外近些年已公開(kāi)的文獻(xiàn)分析可知,這種定位方法衛(wèi)星的定軌精度較低,所以定位誤差較大,僅憑單顆衛(wèi)星的測(cè)量信息是無(wú)法完成高精度的定位功能,其定位精度總會(huì)受到相關(guān)因素的制約[3-8]。因此,需要考慮加入高精度外部傳感器的方式輔助定位。
本文在假設(shè)接收機(jī)只獲得一顆衛(wèi)星信號(hào)的極端條件下,分析利用多源傳感器信息輔助單星定位的可行性,提出了基于多源傳感器信息的單星定位算法。通過(guò)添加高精度氣壓高度計(jì)提供系統(tǒng)高度信息以及芯片級(jí)原子鐘(Chip Scale Atomic Clock,CSAC)消除接收機(jī)時(shí)鐘鐘差的方法,增加衛(wèi)星定位測(cè)距算法中的輔助方程,從而實(shí)現(xiàn)使用更少時(shí)刻的衛(wèi)星數(shù)據(jù)提供定位服務(wù),最終解決單星定位過(guò)程中由于衛(wèi)星空間分布差造成定位精度低的問(wèn)題。通過(guò)理論分析、數(shù)字仿真實(shí)驗(yàn)和靜態(tài)試驗(yàn)的方法,對(duì)提出的算法精度和有效性進(jìn)行了分析和驗(yàn)證。
1 定位方法
1.1 定位原理
多源傳感器信息輔助下的單星連續(xù)測(cè)距定位原理如圖1 所示。即假設(shè)用戶(hù)靜止不動(dòng),接收機(jī)持續(xù)觀測(cè)收集不同時(shí)刻t 衛(wèi)星的偽距測(cè)量值,以及各項(xiàng)偏差、誤差成分的校正量(衛(wèi)星部分誤差校正量)、I(t電離層延時(shí)校正量)、T(t對(duì)流層延時(shí)校正量)和(多路徑誤差校正量)等,從而獲得各時(shí)刻校正后的衛(wèi)星偽距觀測(cè)值,以及各時(shí)刻由衛(wèi)星星歷計(jì)算并經(jīng)地球自轉(zhuǎn)校正后的衛(wèi)星位置坐標(biāo)。
由于利用CSAC 代替TCXO 作為接收機(jī)內(nèi)部時(shí)鐘,可認(rèn)為由接收機(jī)時(shí)鐘誤差造成的偽距測(cè)量誤差(厘米級(jí))可忽略不計(jì)。

圖1 單星連續(xù)測(cè)距定位原理圖
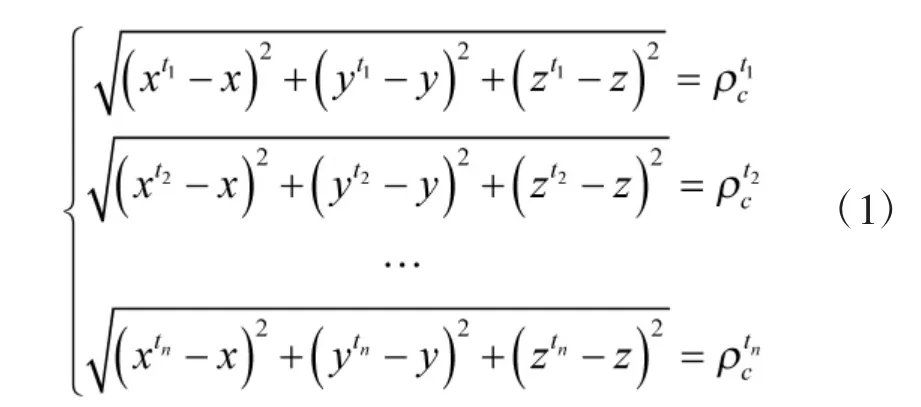
假設(shè)未知用戶(hù)的位置坐標(biāo)為(x,y,z),根據(jù)t1、t2到tn這n 個(gè)時(shí)刻的偽距測(cè)量值可建立如下非線(xiàn)性方程組:
在接收機(jī)的三維位置坐標(biāo)經(jīng)度、緯度和高度中,通常高度信息可通過(guò)外部輔助設(shè)備(如氣壓高度計(jì)、電子地圖等)測(cè)定,或在一個(gè)區(qū)域內(nèi)可認(rèn)為高度值固定已知,此時(shí)只需求解接收機(jī)在水平方向上的二維位置坐標(biāo)分量,便可精確獲得接收機(jī)的位置。同時(shí)減少未知數(shù)的求解可增加定位時(shí)的信息冗余度,從而提高接收機(jī)在水平方向的定位精度。
具體到方程組的求解時(shí),雖然已知用戶(hù)的高度值,但該高度是指地球坐標(biāo)系g系中運(yùn)載體的高度h,而在地心地固坐標(biāo)系e 系中運(yùn)載體的三維坐標(biāo)(x,y,z)仍均為未知數(shù),因此,不能通過(guò)直接減少一個(gè)未知數(shù)來(lái)完成定位求解,而是增加輔助方程個(gè)數(shù),即建立高度與運(yùn)載體三維坐標(biāo)間的關(guān)系式并添加到定位方程組中使得系統(tǒng)只需觀測(cè)兩個(gè)時(shí)刻的衛(wèi)星數(shù)據(jù)便可完成定位解算。

用戶(hù)高度h 與其三維位置坐標(biāo)(x,y,z)之間的關(guān)系式如下:其中,Re、Rp和RN分別為地球的長(zhǎng)半軸、短半軸和運(yùn)載體所在地的卯酉圈曲率半徑。簡(jiǎn)化計(jì)算可得用戶(hù)的高度曲面方程

其中,e 為地球偏心率。
與傳統(tǒng)定位方法相比,單星連續(xù)測(cè)距定位采用“以時(shí)間換空間”的原理,利用衛(wèi)星隨時(shí)間在空間幾何位置的變化彌補(bǔ)了系統(tǒng)的可觀測(cè)性,為系統(tǒng)提供了足夠的量測(cè)信息用于求解方程組,采樣時(shí)間間隔越長(zhǎng),衛(wèi)星不同時(shí)刻間的位置幾何分布越好,定位精度越高。同時(shí)該方法利用了CSAC 的高精度授時(shí)功能,降低了定位時(shí)的測(cè)量維度,提高了系統(tǒng)的性能。
將式(3)加入到式(1)中組成基于多源傳感器信息的單星定位方程組,采用最小二乘法進(jìn)行求解,具體解算過(guò)程因篇幅原因不做贅述,可參考文獻(xiàn)[10-11]。
1.2 精度分析
考慮接收機(jī)觀測(cè)衛(wèi)星并獲得偽距過(guò)程中tn時(shí)刻的偽距測(cè)量誤差,則由最小二乘法解得線(xiàn)性化矩陣


其中

式(6)表明了偽距測(cè)量誤差與定位誤差之間的關(guān)系,一般以均值和方差來(lái)描述測(cè)量誤差對(duì)定位誤差的影響大小,從簡(jiǎn)化定位精度理論分析考慮,我們做以下兩點(diǎn)假設(shè)分別闡述。
則測(cè)量誤差向量ε 的均值為

假設(shè)各時(shí)刻衛(wèi)星測(cè)量之中偽距測(cè)量誤差的各部分誤差相互獨(dú)立,則有

其中,σS代表由衛(wèi)星時(shí)鐘誤差和衛(wèi)星星歷誤差造成的偽距測(cè)量誤差標(biāo)準(zhǔn)差,值約為3 m,σP代表衛(wèi)星信號(hào)傳播中電離層延時(shí)和對(duì)流層延時(shí)造成的偽距測(cè)量誤差標(biāo)準(zhǔn)差,值約為5 m,σR代表與接收機(jī)和多路徑有關(guān)的誤差造成的偽距測(cè)量誤差標(biāo)準(zhǔn)差,值約為1 m。計(jì)算可得偽距測(cè)量誤差造成的定位誤差約為5.9 m。實(shí)際中的估算方法要更復(fù)雜,包括考慮衛(wèi)星信號(hào)強(qiáng)度,衛(wèi)星仰角值和接收機(jī)跟蹤環(huán)路運(yùn)行狀態(tài)等具體指標(biāo),這里不做深入探討。
2)假設(shè)衛(wèi)星各時(shí)刻間的測(cè)量誤差不相關(guān)。
此時(shí)測(cè)量誤差向量ε 的協(xié)方差矩陣Kε為
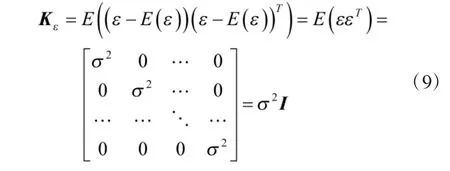
其中,I 為n×n 的單位陣。實(shí)際測(cè)量時(shí),由于是接收同一顆衛(wèi)星的發(fā)射信號(hào),不同時(shí)刻間的測(cè)量誤差間肯定存在相關(guān)性,此處假設(shè)只是為簡(jiǎn)化定位誤差協(xié)方差矩陣的推導(dǎo)。則由式(6)和式(9)可得
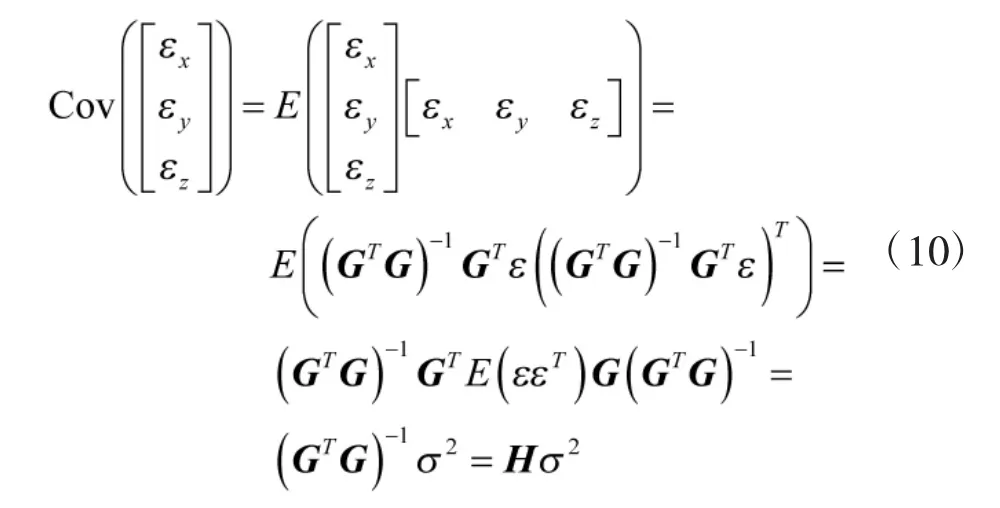
采用幾何精度因子GDOP 來(lái)表示誤差的放大倍數(shù),其計(jì)算方法為

將定位誤差從地心地固坐標(biāo)系轉(zhuǎn)化到地理坐標(biāo)系中有
其中

為地心地固坐標(biāo)系到地球坐標(biāo)系的方向余弦矩陣。
則式(10)在地球坐標(biāo)系下的表示為


GDOP 值越小,定位誤差越小。
將式(4)不考慮偽距測(cè)量誤差投影到地球坐標(biāo)系中有


2 驗(yàn)證分析
為了驗(yàn)證所設(shè)計(jì)的基于多源傳感器的單星定位算法的有效性和精度,本文采用數(shù)字仿真驗(yàn)證和跑車(chē)動(dòng)態(tài)試驗(yàn)方式進(jìn)行驗(yàn)證。1)數(shù)字仿真驗(yàn)證:通過(guò)仿真衛(wèi)星的軌道實(shí)現(xiàn)衛(wèi)星的仿真數(shù)據(jù)激勵(lì),模擬靜態(tài)載體長(zhǎng)時(shí)間只接收一顆衛(wèi)星的星歷數(shù)據(jù),對(duì)不同數(shù)量傳感器輔助下的單星定位算法進(jìn)行了有效性仿真驗(yàn)證,采用蒙特卡洛分析法對(duì)算法的定位精度數(shù)據(jù)進(jìn)行了統(tǒng)計(jì)分析;2)靜態(tài)試驗(yàn)驗(yàn)證:利用GNSS 單頻接收機(jī)、高精度氣壓高度計(jì)和CSAC 搭建基于C 多傳感器的單星定位靜態(tài)試驗(yàn)環(huán)境,完成對(duì)一顆衛(wèi)星信號(hào)的持續(xù)觀測(cè),并利用所獲得的試驗(yàn)數(shù)據(jù)對(duì)單星定位系統(tǒng)進(jìn)行了精度評(píng)估,最終驗(yàn)證基于多源傳感器信息的單星定位算法在實(shí)際應(yīng)用時(shí)的有效性和精度。
2.1 數(shù)字仿真驗(yàn)證
利用自行設(shè)計(jì)的理想圓軌道衛(wèi)星仿真軟件,載入一顆編號(hào)為“4”的在軌衛(wèi)星進(jìn)行仿真數(shù)據(jù)激勵(lì),其衛(wèi)星軌道特征如表1 所示。
選擇衛(wèi)星的過(guò)頂時(shí)間作為單星定位服務(wù)時(shí)間段,其運(yùn)行時(shí)長(zhǎng)為1 h,用戶(hù)位置為(北緯34.25°,東經(jīng)108.91°,高380 m),星下點(diǎn)軌跡如圖2 所示。
由于短時(shí)間內(nèi)衛(wèi)星運(yùn)行距離較短,導(dǎo)致不同時(shí)刻的衛(wèi)星依然集中在一起或在一條直線(xiàn)上,這時(shí)不同時(shí)刻衛(wèi)星的幾何分布很差,因此,本試驗(yàn)選取t=300 s 時(shí)刻為起始解算時(shí)刻,即單星定位接收機(jī)開(kāi)機(jī)前5 min 只做數(shù)據(jù)收集工作,從5 min 開(kāi)始做定位解算,每個(gè)時(shí)刻t 選取3 個(gè)時(shí)刻的衛(wèi)星信息作為偽距量測(cè)信息,這3 個(gè)時(shí)刻分別為1、t/2 和t 時(shí)刻,以確保衛(wèi)星的幾何分布結(jié)果最好。

表1 “4”號(hào)衛(wèi)星軌道特征表
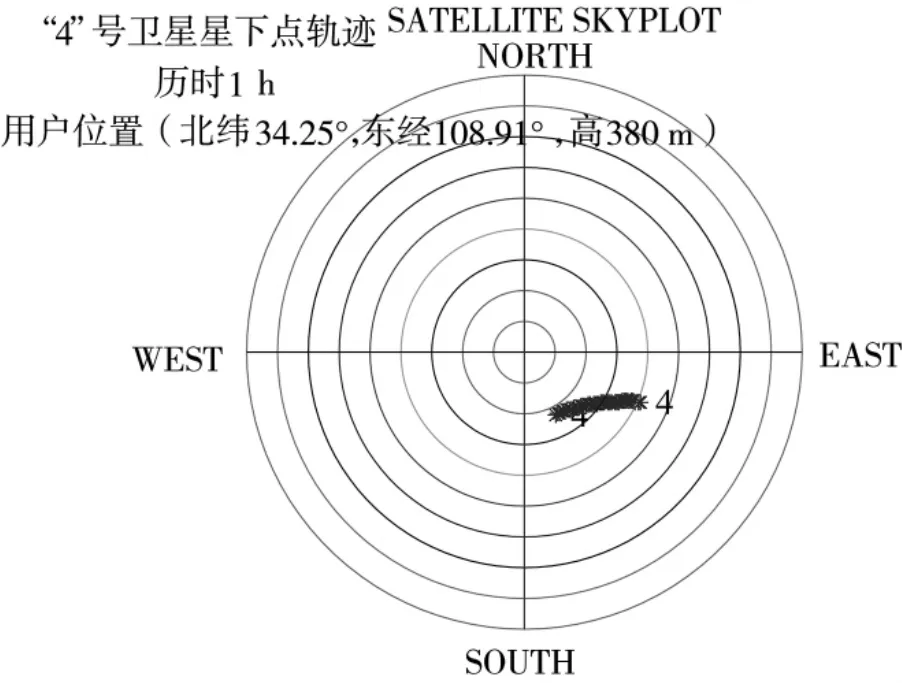
圖2 “4”號(hào)衛(wèi)星1 h 運(yùn)行星下點(diǎn)軌跡圖
分別選擇注入偽距觀測(cè)誤差均方差為1 m 和3 m,在上述仿真環(huán)境下進(jìn)行單星定位解算,根據(jù)上述仿真條件,其中當(dāng)偽距觀測(cè)誤差均方差為1 m 時(shí),得到用戶(hù)的三維定位結(jié)果誤差和幾何精度因子GDOP 隨時(shí)間的變化如圖3、圖4 所示(程序橫坐標(biāo)軸t 時(shí)刻為接收機(jī)開(kāi)機(jī)后(t+300)s 時(shí)刻)。

圖3 偽距測(cè)量誤差為1 m 時(shí)的單星定位結(jié)果
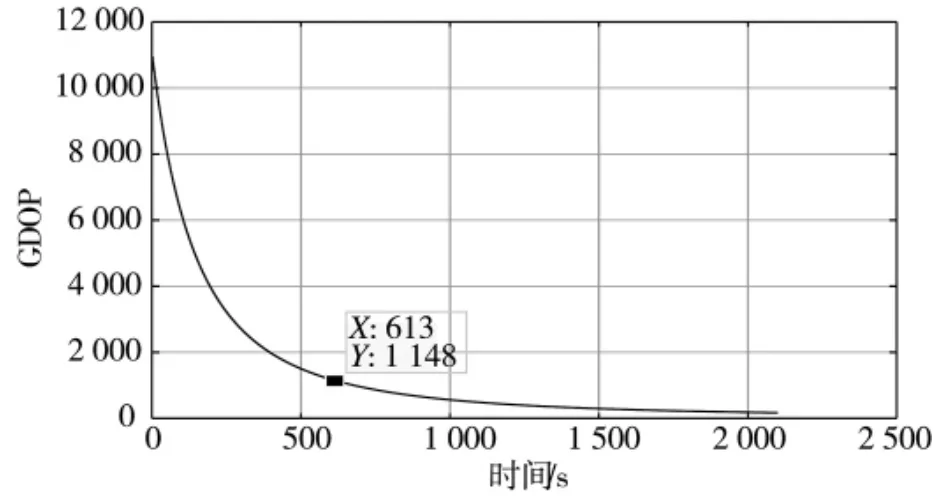
圖4 偽距測(cè)量誤差為1 m 時(shí)的GDOP
由圖3 可知,當(dāng)偽距測(cè)量誤差均方差為1 m 時(shí),僅以CSAC 輔助單星定位解算是可行的,仿真在900 s 左右完成了精度為1 km 的定位。由圖4 可知,隨著時(shí)間的增加,系統(tǒng)的GDOP 值在減小,即所選取3 個(gè)時(shí)刻的衛(wèi)星的幾何分布越來(lái)越好,但在900 s左右時(shí)GDOP 值仍在103的數(shù)量級(jí)別,這表明單星定位短期效果仍遠(yuǎn)差于傳統(tǒng)的多星定位。
利用蒙特卡洛仿真分析單星定位精度的統(tǒng)計(jì)特性,分別對(duì)用戶(hù)偽距測(cè)量誤差均方差為1 m 和3 m,采樣時(shí)間為600 s 和1 200 s 時(shí)的單星定位進(jìn)行100 次蒙特卡洛仿真,求得其結(jié)果的RMS 誤差作為單星定位統(tǒng)計(jì)精度,其中偽距誤差為1 m,采樣時(shí)間為1 200 s 時(shí)的蒙特卡洛仿真統(tǒng)計(jì)結(jié)果如圖5 所示,總的仿真統(tǒng)計(jì)結(jié)果如表2 所示。
由表2 結(jié)果可知,基于CSAC 輔助的靜態(tài)單星定位雖然可行,但由于僅能利用1 顆衛(wèi)星的數(shù)據(jù),多個(gè)時(shí)刻衛(wèi)星的空間幾何分布很差,導(dǎo)致GDOP 過(guò)大,當(dāng)偽距測(cè)量誤差的均方差為1 m 時(shí),需持續(xù)觀測(cè)20 min 方能達(dá)到400 m 的定位精度,而當(dāng)偽距測(cè)量誤差的均方差只增加2 m(從1 m 到3 m)時(shí),最終定位精度便從365.926 m 上升到1 270.489 m,可見(jiàn)單星定位系統(tǒng)是及其脆弱的,即使利用CSAC 降低了一維的測(cè)量維度信息,最終定位結(jié)果仍隨較小的偽距測(cè)量誤差的變化發(fā)生較大的波動(dòng),其根本原因就是短時(shí)間測(cè)量得到的3 個(gè)時(shí)刻的3 個(gè)衛(wèi)星位置之間的空間相關(guān)性很高,衛(wèi)星的幾何分布很差,從而使得權(quán)系矩陣H(或)的元素值過(guò)大。
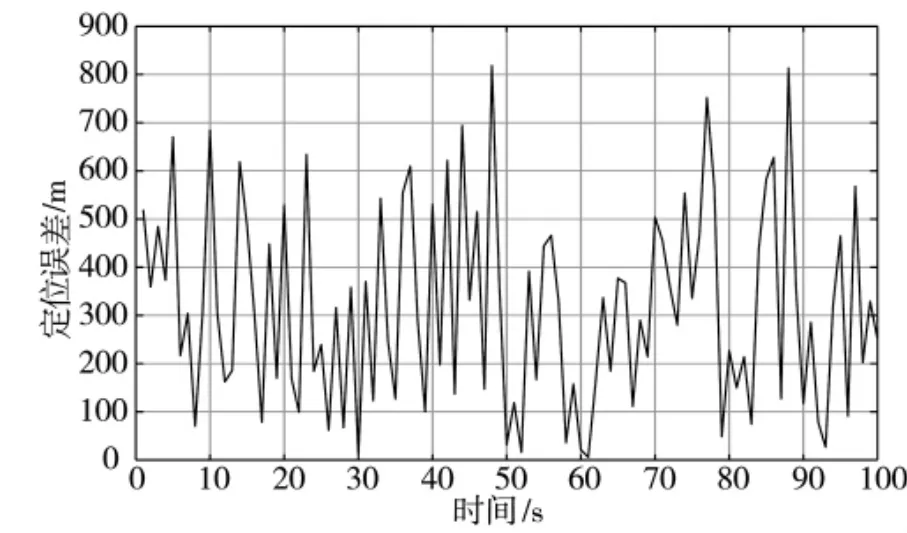
圖5 偽距測(cè)量誤差為1 m 時(shí)的100 次蒙特卡洛仿真統(tǒng)計(jì)
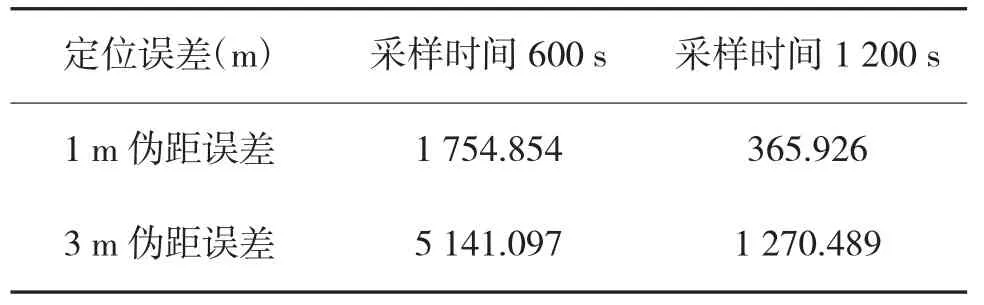
表2 基于CSAC 的單星連續(xù)測(cè)距定位精度(RMS)
設(shè)置仿真條件同上,并只采用兩個(gè)時(shí)刻(1 時(shí)刻與t 時(shí)刻)的衛(wèi)星數(shù)據(jù),假設(shè)用戶(hù)高度信息h=380 m可通過(guò)外部輔助器件測(cè)量獲得。考慮實(shí)際測(cè)量時(shí)仍會(huì)代入一定的測(cè)量誤差,設(shè)置注入誤差:偽距測(cè)量誤差均方差1 m,高度測(cè)量誤差均方差3 m。仿真可得基于高度信息與時(shí)鐘誤差約束下的單星定位誤差結(jié)果如圖6 所示。

圖6 基于高度信息與時(shí)鐘誤差約束下的單星定位
由圖6 可知,基于高度信息與時(shí)鐘誤差約束下的單星系統(tǒng)在約100 s 便完成了1 km 精度的定位,所用時(shí)間遠(yuǎn)小于僅用CSAC 輔助的單星定位系統(tǒng)(約900 s),同時(shí)經(jīng)100 次蒙特卡洛仿真統(tǒng)計(jì)可知系統(tǒng)可在200 s 完成327.25 m(RMS)的定位精度,在300 s 完成240.56 m(RMS)的定位精度,系統(tǒng)的整體性能均遠(yuǎn)優(yōu)于僅利用CSAC 輔助的單星定位系統(tǒng)。仿真可得當(dāng)偽距測(cè)量誤差為1 m,連續(xù)觀測(cè)200 s 時(shí)高度測(cè)量誤差對(duì)系統(tǒng)定位精度(RMS)的影響如圖7所示。
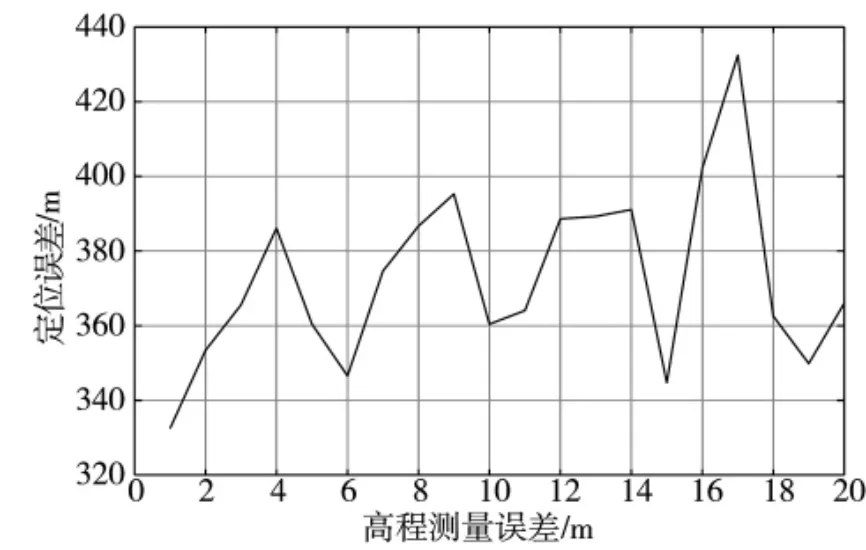
圖7 高度測(cè)量誤差對(duì)系統(tǒng)定位精度(RMS)的影響
由圖7 可知與偽距測(cè)量誤差相比,高程測(cè)量誤差并不是造成高度信息約束下單星定位誤差的主要誤差源。由于該方法滿(mǎn)足在緊急情況下僅利用單星測(cè)量數(shù)據(jù)定位的精度指標(biāo)(定位時(shí)間<5 min,定位精度500 m),因此,可廣泛應(yīng)用于應(yīng)急定位服務(wù)中。
2.2 靜態(tài)試驗(yàn)驗(yàn)證
由于基于多源傳感器信息的單星連續(xù)測(cè)距定位算法需求接收機(jī)對(duì)衛(wèi)星連續(xù)觀測(cè)一段時(shí)間方能定位,因此,該方法并不適用于載體動(dòng)態(tài)環(huán)境下的實(shí)時(shí)定位,在利用實(shí)際數(shù)據(jù)對(duì)該算法做試驗(yàn)驗(yàn)證時(shí)也只能采用靜態(tài)試驗(yàn)數(shù)據(jù)。本節(jié)利用GNSS 單頻接收機(jī)、高精度氣壓高度計(jì)和CSAC,搭建基于多源傳感器信息的單星定位靜態(tài)試驗(yàn)環(huán)境,在衛(wèi)星信號(hào)拒止環(huán)境下完成對(duì)一顆衛(wèi)星信號(hào)的持續(xù)觀測(cè),并利用所獲得的試驗(yàn)數(shù)據(jù)對(duì)單星定位系統(tǒng)進(jìn)行了精度評(píng)估,最終驗(yàn)證基于多源傳感器信息的單星連續(xù)測(cè)距定位算法在實(shí)際應(yīng)用時(shí)的有效性。
2.2.1 驗(yàn)證環(huán)境
為驗(yàn)證所設(shè)計(jì)的單星連續(xù)測(cè)距定位算法的實(shí)用性,在實(shí)驗(yàn)室搭建靜態(tài)試驗(yàn)數(shù)據(jù)采集和算法仿真驗(yàn)證環(huán)境如圖8 所示。實(shí)驗(yàn)環(huán)境主要由Microsemi公司生產(chǎn)的型號(hào)為SA.45s 的CSAC、1 臺(tái)Novatel OEM 638 高精度GNSS 接收機(jī)、臺(tái)式計(jì)算機(jī)、1 根GNSS 天線(xiàn)、RAS-2 型氣壓高度計(jì)以及若干導(dǎo)線(xiàn)組成。
在實(shí)現(xiàn)單星靜態(tài)定位試驗(yàn)數(shù)據(jù)采集與處理前,先進(jìn)行兩個(gè)預(yù)試驗(yàn),分別為接收機(jī)高度測(cè)定試驗(yàn)和CSAC 馴服試驗(yàn)。其中接收機(jī)高度測(cè)定試驗(yàn)為靜態(tài)試驗(yàn)提供接收機(jī)高精度高度先驗(yàn)信息,CSAC 馴服試驗(yàn)完成CSAC 對(duì)接收機(jī)內(nèi)時(shí)鐘的替代,從而為主試驗(yàn)的順利完成奠定了基礎(chǔ),由于篇幅原因,本文對(duì)這兩個(gè)預(yù)實(shí)驗(yàn)不做贅述。
2.2.2 定位數(shù)據(jù)分析

圖8 單星定位靜態(tài)試驗(yàn)環(huán)境
設(shè)置觀測(cè)時(shí)間為2019 年9 月29 日22:10 到2019 年9 月29 日22:20。GNSS 接收機(jī)天線(xiàn)在該時(shí)間內(nèi)只能接收PRN 編號(hào)為“5”的衛(wèi)星數(shù)據(jù),SA.45 s負(fù)責(zé)提供這一時(shí)段的時(shí)鐘基準(zhǔn),先驗(yàn)高度信息為410.5 m。將接收機(jī)在0.5 h 內(nèi)對(duì)“5”號(hào)衛(wèi)星持續(xù)觀測(cè)并記錄的衛(wèi)星星歷數(shù)據(jù)和原始觀測(cè)信息輸入到計(jì)算機(jī)中分析處理,得到10 min 內(nèi)衛(wèi)星的實(shí)時(shí)位置與偽距測(cè)量值,利用高度信息和時(shí)鐘誤差約束下的單星定位算法,對(duì)這組數(shù)據(jù)進(jìn)行定位解算并與接收機(jī)實(shí)際位置比較可得算法的定位精度,所得結(jié)果如圖9 所示。
試驗(yàn)結(jié)果可知,真實(shí)接收機(jī)經(jīng)過(guò)對(duì)一顆衛(wèi)星的連續(xù)觀測(cè),輔以高精度CSAC 和氣壓高度計(jì)提供時(shí)鐘和高度信息,可在2 min 內(nèi)完成500 m 精度定位以及在5 min 內(nèi)完成200 m 精度定位,完全符合戰(zhàn)時(shí)應(yīng)急定位精度需求。但由于CSAC 只能消除接收機(jī)時(shí)鐘誤差和鐘漂,無(wú)法消除多路徑效應(yīng)、電磁干擾和接收機(jī)噪聲等其他誤差對(duì)偽距測(cè)量誤差的影響,接收機(jī)內(nèi)部模型也無(wú)法做到完整補(bǔ)償,因此,仍有小部分噪聲的存在引起定位結(jié)果收斂后的瞬時(shí)跳動(dòng)。
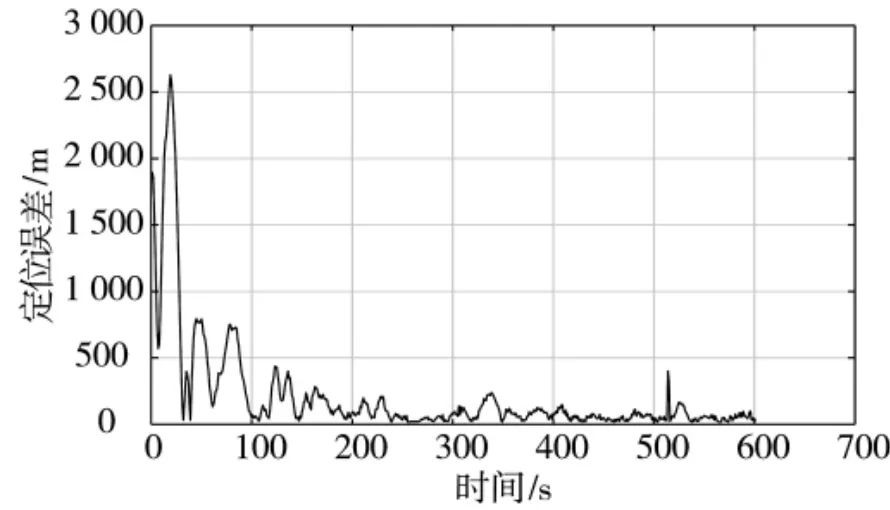
圖9 單星靜態(tài)三維定位精度
3 結(jié)論
本文在假設(shè)接收機(jī)只獲得一顆衛(wèi)星信號(hào)的極端條件下,對(duì)基于多源傳感器信息的單星連續(xù)測(cè)距定位算法及其精度分析作了理論分析探討,在此基礎(chǔ)上利用Matlab 軟件對(duì)上述算法進(jìn)行了仿真驗(yàn)證,最后搭建靜態(tài)試驗(yàn)平臺(tái)完成了C 多源傳感器信息輔助單星定位算法的靜態(tài)數(shù)據(jù)驗(yàn)證。仿真與實(shí)驗(yàn)結(jié)果表明,真實(shí)接收機(jī)經(jīng)過(guò)對(duì)一顆衛(wèi)星的連續(xù)觀測(cè),輔以高精度CSAC 和氣壓高度計(jì)提供時(shí)鐘和高度信息,可在2 min 內(nèi)完成百米級(jí)精度定位,完全符合戰(zhàn)時(shí)應(yīng)急定位精度需求。