發動機曲軸信號倍頻與噴射系統控制研究
2021-03-25 02:09:46湯惠淞吳長水
軟件導刊 2021年3期
湯惠淞,吳長水
(上海工程技術大學機械與汽車工程學院,上海 201620)
0 引言
隨著電子控制技術的發展,發動機位置管理由原來的機械式發展到精確的電子控制,通過傳感器對曲軸和凸輪軸信號的采集和算法標記,可確定發動機實時位置和最佳噴射正時,實現對噴射系統的實時控制。黃宇[1]研究雙燃料發動機改造關鍵技術,即對噴射系統的改造技術;趙叢姣等[2]研究噴射正時對燃燒規律的影響,即實現噴射系統精確控制,發現燃油噴射系統參數噴射提前角、噴射正時控制等對發動機的燃燒特性、經濟性和排放性等有重要影響;楊騏菲等[3]對曲軸信號處理和倍頻進行研究,發現有效的倍頻信號可提高噴射系統控制精度;張暉等[4]、李利平等[5]對雙燃料發動機的噴射系統進行研究,精確的噴射系統控制都是以準確的曲軸信號為基準,因此曲軸信號精度將影響整個發動機的性能。本文根據TC1728 微控制器的豐富資源,設計高精度倍頻曲軸信號算法,可從倍頻后的曲軸信號獲取豐富的發動機位置信號,實現對發動機精準的噴射控制。
1 控制單元
1.1 微控制器TriCore1728
本文以英飛凌公司AUDO MAX 系列中32 位高時鐘頻率微處理器TC1728[6]作為主控芯片。TC1728 具有多個內核,其中央處理器和片上外圍設備的工作頻率相互獨立,中央處理器最高工作頻率可達133MHz,片上外圍設備工作頻率可達80MHz。還具有精簡指令集(RISC)處理器構架、數字信號處理器(DSP)操作和尋址模式、片上存儲器和豐富的外設資源,如中央處理器(CPU)、多通道模數轉換器(ADC)、外圍控制處理器(PCP)、通用定時器陣列(GP?TA)、微妙級通道(MSC)等。同時,還具有豐富的中斷源,具有181 個中斷節點,256 個中斷優先級可向CPU 和PCP請求中斷服務。
1.2 倍頻模塊GPTA 功能
定時器陣列GPTA 內部包含一組高速數字信號處理單元:濾波和預分頻單元(FPC)支持輸出信號噪聲濾波和預分頻操作;占空比測量單元(DCM)實現脈沖周期測量;數字鎖相環單元(PLL)在一個輸入信號周期中產生數量可編程的模塊時鐘標記;全局定時器單元(GT)用作全局定時器單元(GTC)的時間基準,GTC 具有捕獲/比較功能,多個GTC 可以邏輯級聯生成復雜的波形并輸出到外部端口;本地定時器單元(LTC)可實現定時、信號捕捉和比較功能,多個LTC 可用于提供觸發或門控信號,同時可觸發LTC 和GTC 相關操作。GPTA 模塊內核關系如圖1 所示。
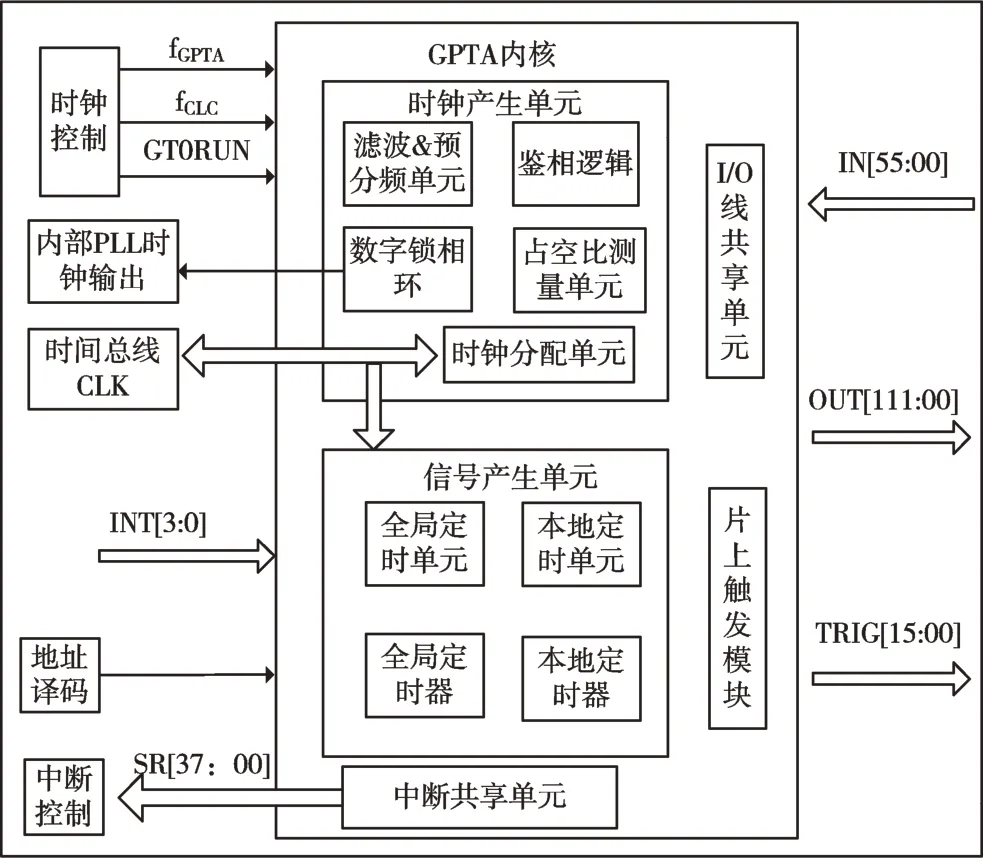
Fig.1 The kernel relationship of GPTA圖1 GPTA 內核關系
2 曲軸信號配置
曲軸信號是發動機精準控制的基礎,噴射系統主要依托曲軸信號,因此獲得有效的曲軸信號,是控制發動機的關鍵[7]。為獲得曲軸信號,一般采用光電傳感器和霍爾傳感器進行采集[8-10]。但光電傳感器輸出信號為正弦波信號,必須通過信號處理電路處理后,才能被CPU 處理,增加了電路設計的難度和成本。而霍爾傳感器可直接輸出方波信號并由GPTA 模塊處理,無需特定處理電路,簡單方便,本文使用霍爾傳感器進行曲軸信號采集。
本文研究對象是四缸四沖程發動機,其曲軸信號盤采用均勻布置的60 個齒[9]。為了獲得缸號和上止點位置信息,一般去掉2 個齒,即采用60-2 個齒,并稱去掉的齒為缺齒。正常齒產生的方波信號每個周期為6CA,缺齒為18CA。曲軸信號盤和采集信號波形如圖2 所示。
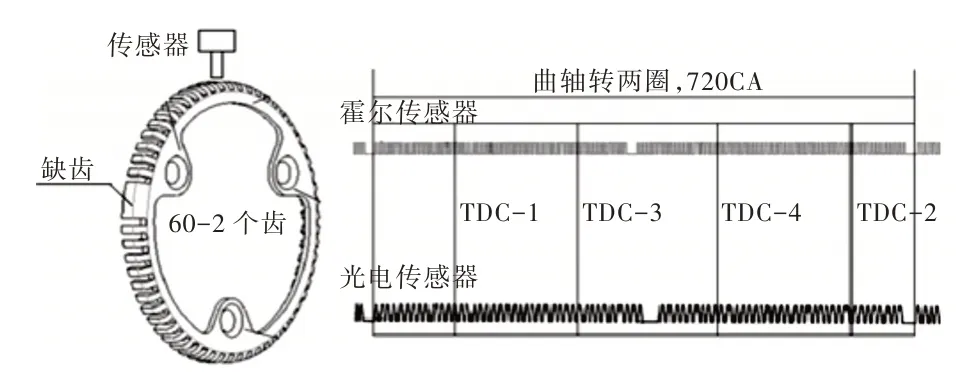
Fig.2 Crankshaft signal panel and signal waveform圖2 曲軸信號盤和信號波形
3 曲軸信號倍頻算法設計
曲軸信號通過霍爾傳感器采集,由濾波電路處理后,將得到的方波信號通過I/O 端口輸入到TC1728,由GPTA內核中的各個單元進行倍頻處理。倍頻后的信號由GTC/LTC 單元生成PWM 波控制噴射驅動單元并進行噴射控制[11-12]。曲軸信號控制噴射系統整個過程如圖3 所示。
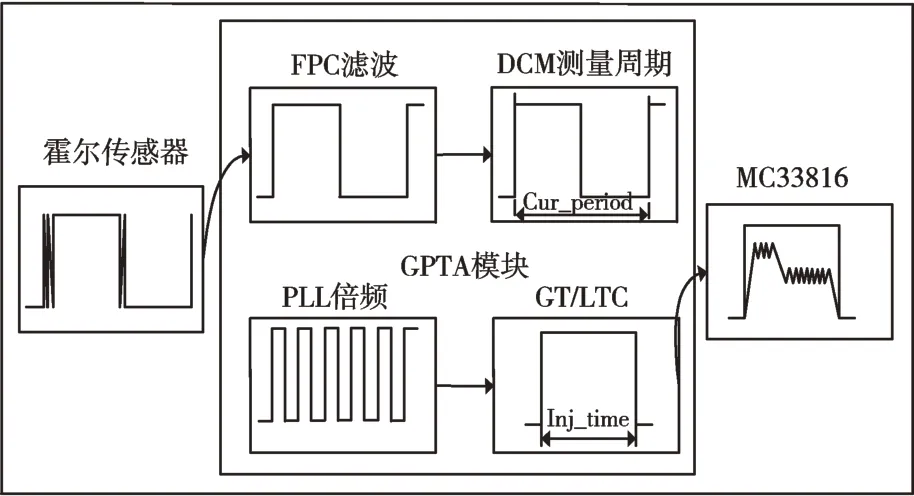
Fig.3 Crankshaft signal flow relationship圖3 曲軸信號流動關系
3.1 軟件設計
3.1.1 濾波單元FPC
曲軸信號為高頻方波信號,容易受到外界干擾,形成錯誤波形。如果采集到錯誤的波形,會對后面的控制產生嚴重影響。利用FPC 對曲軸信號進行濾波處理,得到干凈的曲軸信號。FPC 的濾波模式可分為即時去抖濾波法和延遲去抖濾波法。即時去抖濾波法,檢測到輸入信號邊沿后,在編程設定的時間內對輸入信號的跳變和毛刺進行濾波;延遲去抖濾波法,用一個比選定的時鐘周期和比寄存器值的乘積稍小的信號寬度,對輸入信號上的所有跳變和毛刺進行濾波。根據設計需要,對輸入信號的濾波用兩種濾波法隨意組合,本文采用上升沿延遲濾波、下降沿即時濾波。混合濾波模式下的波形如圖4 所示。
3.1.2 占空比測量單元DCM
GPTA 模塊含有4 個DCM 單元(DCM0-DCM3),每個DCM 由24 位定時器、24 位捕獲寄存器、24 位捕獲/比較寄存器、24 位比較器和DCM 控制單元組成。測量曲軸周期使用DCM 的定時器/捕獲寄存器CAV,設置捕獲寄存器為下降沿觸發中斷,將GPTA 總線時鐘fGPTA遞增計數至下一次觸發,并將捕獲的時鐘個數保存在寄存器DMU 中。捕獲完成后定時器自動復位,重新計數,定時器所記錄的一個曲軸齒的周期長度Cur_period=TGPTA*GPTA_DCMCAV0。
本文根據雙燃料發動機的額定轉速為4 000rpm,曲軸信號的最大頻率小于4KHz,將GPTA 模塊的時鐘頻率fGPTA設置為5MHz。由于輸入信號不一定是fGPTA的整數倍,故存在最大捕獲誤差?δ1為一個周期的TGPTA(圖5 為DCM 捕獲誤差原理圖),即在GPTA 總線fGPTA為5MHz 的頻率下,DCM 捕獲誤差時間控制在0.2us 內。對于傳統的捕獲模式,也會產生相同的誤差?ε1=Tcapture。
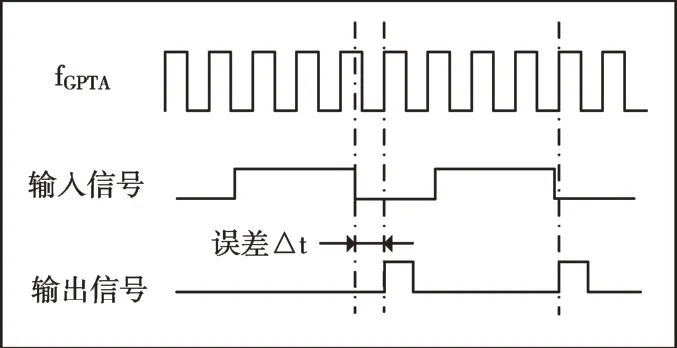
Fig.5 Acquisition error principle of DCM unit圖5 DCM 單元捕獲誤差原理
3.1.3 倍頻單元PLL
PLL 是具有倍頻功能的數字鎖相環單元,在一個輸入信號周期內,在規定的時間周期內產生期望數目的時鐘脈沖。PLL 還具有自動調速功能,當自動結束模式位(PLLC?TR.AEN)置位時,可以根據輸入信號的加速和減速進行自動補償。若自動結束模式復位,PLL 將不與輸入信號沿同步連續產生輸出脈沖。與傳統倍頻方式對比可以發現,經過定時陣列GPTA 處理后的倍頻信號,誤差遠小于傳統方式,提高了控制精度。圖6 為TP=20 個TGPTA下,分頻因子n=6 時,兩種方式倍頻后的波形對比,易得出傳統方式形成的波形不均勻,而本文倍頻方式信號更均勻有效。
在實際過程中,發動機的轉速并不是恒定的,存在加減速過程,因此轉速發生變化時,設計的算法應能自動補償。PLL 具有自動補償功能,能有效減少倍頻信號誤差。如在減速情況下,信號周期的長度逐漸變大,因為在PLL設置時GPTA0_PLLMTI 為固定值,在不同的周期長度下將生成相同個數倍頻脈沖,因此倍頻脈沖的周期會發生變化。脈沖周期不同,對GT 單元波形也產生很大誤差。本文設計一種自適應算法,實時監測曲軸信號周期,當監測到曲軸信號周期變化時,將對PLL 中的寄存器GP?TA0_PLLMTI 和GPTA0_PLLREV 進行算法控制,提高倍頻精度。在轉速變化下PLL 倍頻波形如圖7 所示。
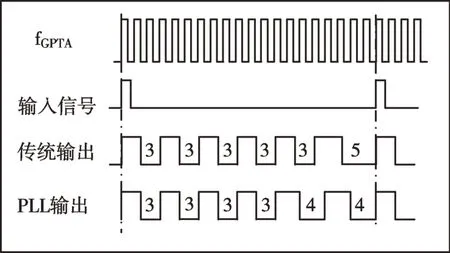
Fig.6 PLL frequency doubling waveform圖6 PLL 倍頻波形
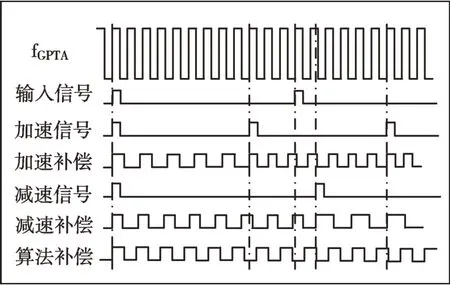
Fig.7 PLL frequency doubling waveform comparison圖7 PLL 倍頻波形對比
3.2 倍頻原理分析與誤差分析
經過FPC 濾波后得到干凈的曲軸信號,由DCM 測量出周期長度Tp,在PLL 中設置倍頻初始值。設置DCM 和PLL 中斷,在DCM 中斷中,讀取實時的周期長度值Tp,在PLL 中斷中利用測得的Tp設置算法,得到均勻的倍頻信號。經過DCM 測得的實際曲軸信號周期后,輸入到PLL進行倍頻。DCM 測得的周期長度Tp存在如式(1)所示關系:

PLL 根據測得的周期長度Tp和倍頻因子n確定倍頻信號周期的長度。倍頻因子大小,決定了倍頻信號周期的大小。倍頻因子越大,倍頻后的頻率越高,精度越高,反之精度越低。由式(1)可知,PLL 倍頻時存在兩種情況:一種是曲軸周期長度與倍頻因子可整除,只需要計數n次;第二種是不能整除,留有余數,需要計算(n+1)次。PLL 倍頻方式通過余數再分配到每個周期上,使周期更加均勻,有效減少了誤差,誤差最大為:

因此,曲軸信號通過GPTA 模塊處理后的最大誤差為:

傳統的倍頻方式是直接除以分頻因子n,將余數全部放在最后一個周期上,導致產生誤差,最大誤差可達:

式中,Tbus為傳統倍頻時的時鐘周期。傳統方式曲軸信號處理后的最大誤差為:

例如,現以倍頻因子n=20,在2 500rpm 轉速下,GPTA的總線時鐘頻率設置為5MHz,DCM 測量出正常齒的周期長度為:

對于一個曲軸正常齒的轉角為6CA,通過倍頻后,倍頻輸出信號周期Tt為:

角度誤差?θ為:

因此,總誤差為δ=0.006CA,不同轉速下,曲軸信號20倍頻誤差大小如表1 所示。可以得出,在轉速800~4 000rpm 時,曲軸倍頻信號的最大誤差小于0.01CA。雖然隨著轉速增大,倍頻誤差有所增加,但依然滿足倍頻精度要求,倍頻結果符合設計要求。
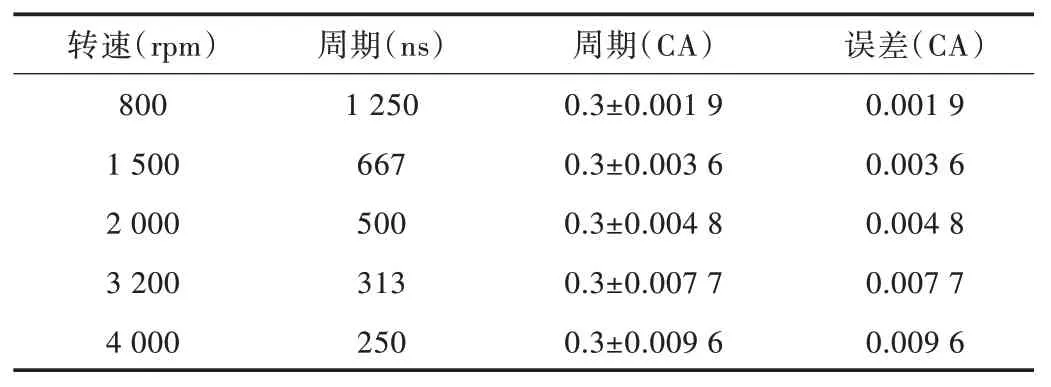
Table 1 20 times frequency of crankshaft signal at different speeds表1 不同轉速下曲軸信號20 倍頻
4 噴射正時控制應用
進入曲軸信號處理函數crankshaft()運行流程如圖8所示。根據DCM 實時測得兩次中斷之間的時間周期計算發動機速度,獲得以PLL 倍頻后信號為時鐘GT 的當前計數,作為角度計算噴油時刻的基礎。如果當前齒長度大于2.5 倍的上一齒長度,即DCMCurCrksft>2.5×DCMLastCrksft,可判斷當前發動機位置是曲軸缺齒位置,將Flag_Crank?shaft 置1。此時曲軸角度已經同步,可以使用當前同步角度控制噴射時刻。Flag_Syn 復位,等待下一次判缸,使能夠更新同步角度。例如,如果同步后的角度SynAngle=705CA,可知當前發動機位置在凸輪軸多齒的下降沿,目前發動機的位置到1 缸TDC1 的角度TDC_Angle1 為:

計算1 缸噴油時刻:

其中,AdvAng為噴油提前角,CapPLLtime是當前GT 的時鐘。根據曲軸信號盤設計,可以依次計算出剩余缸的噴射時刻。
轉速為2 000rpm 時,1 缸噴射波形如圖9 所示(彩圖掃OSID 碼可見),綠色為噴射脈寬PWM 波,控制噴射正時,黃色為倍頻后的曲軸信號,紅色為1 缸驅動波形。通過MAP 圖可以查得噴油脈寬為2.6ms,對應的曲軸轉角為31.2CA。在傳統控制下,精度為3CA。噴油脈寬整除3CA部分由曲軸齒數控制,剩余余數由定時器控制,增加了程序設計難度,而且控制精度差。本文根據GPTA 獨特功能設計了算法,在倍頻系數為20 倍時,曲軸信號的精度為0.03CA,不需要復雜的控制算法,直接對倍頻信號計數,就可以實現噴油脈寬的控制。控制算法簡單,程序穩定性高。噴射精度也遠大于傳統控制方式。
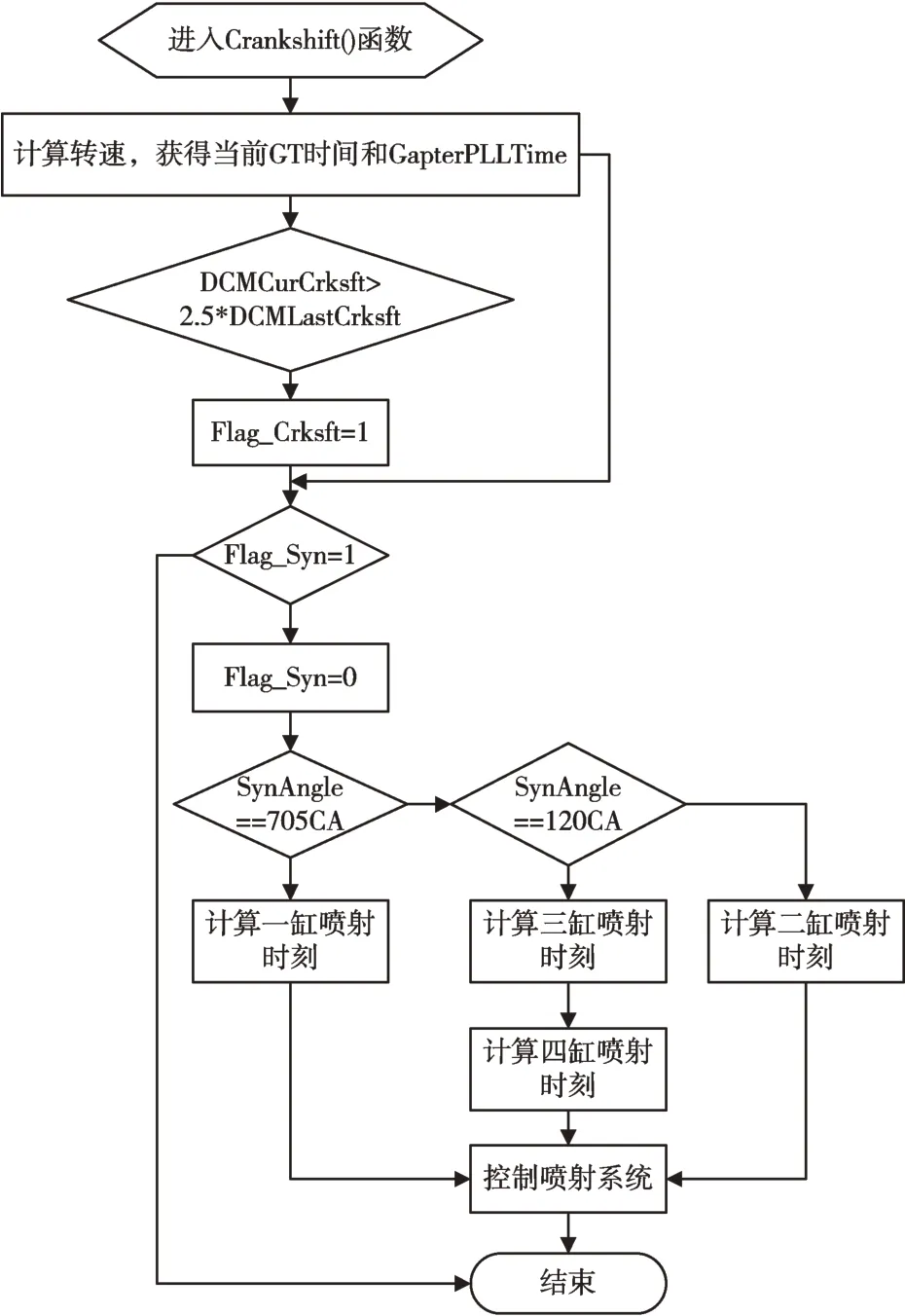
Fig.8 Function flow圖8 函數流程
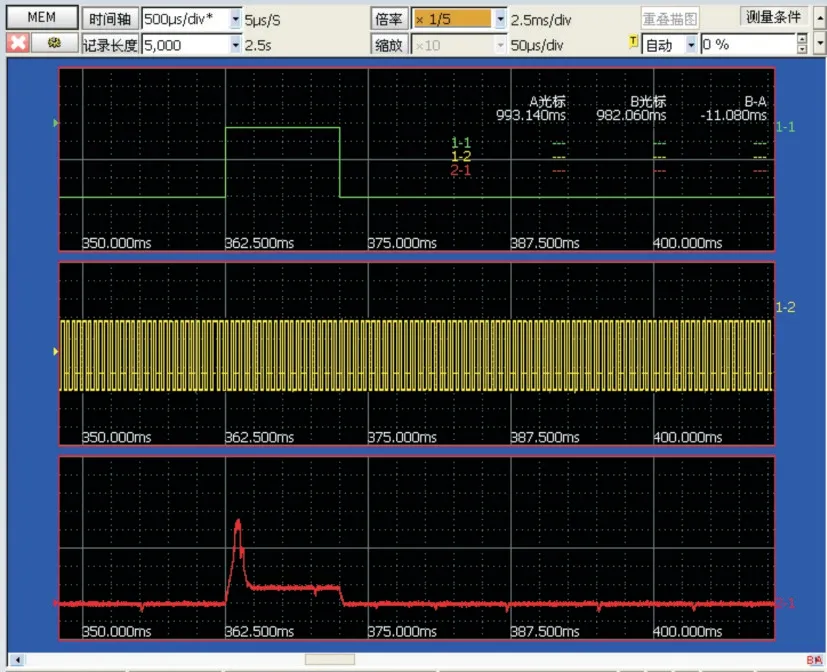
Fig.9 Injection waveform圖9 噴射波形
5 結語
本文利用TC1728 芯片的豐富資源,設計了倍頻曲軸信號算法,在硬件支持上,簡化了算法設計,提高了ECU 的性能利用率。利用GPTA 獨特的功能和算法設計,將倍頻誤差控制在兩個GPTA 時鐘脈沖內,得到了高精度信號。分析實驗結果可知,精準的曲軸信號控制噴射系統更簡單、穩定,精度也更高。下一步工作將研究高精度信號在噴射正時控制中對燃燒過程的影響。未來可將開發的軟件轉化為符合AUTOSAR 架構規范的軟件組件,提高移植性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17