淺談地下鏟運機司機室的設計
2021-03-25 08:44:48鄧志銳趙金元
有色設備 2021年1期
鄧志銳 ,趙金元 ,劉 威
(1.中鋼集團衡陽機械公司,湖南衡陽 421002;2.長沙礦山研究院有限責任公司,湖南長沙 410012)
0 前言
隨著地下礦山的開采,無軌設備使用越來越多,地下鏟運機作為主要采礦設備,其作業環境十分惡劣、彎多、坡多、道路窄、路面條件差,而且在封閉的環境作業,沒有自然光,燈光強度往往不足,猶如在黑暗中作業。再加上地下無軌釆礦車輛在礦井作業,其外形尺寸受到巷道尺寸的限制,具有矮、長和窄的特點,還有低矮型地下鏟運機、超低矮型地下鏟運機之分,致使司機座位極低,空間狹窄,司機室因空間限制設計多樣化[1-2],外形結構有雙柱頂棚、四柱頂棚、全封閉式,如圖1 所示。司機室結構安全、工作空間大小、操縱舒適性、視線能見度、控制元件位置合理設計,不僅影響生產效率,直接關系到司機的安全健康,如何正確設計合乎要求的司機室對司機的安全十分重要。
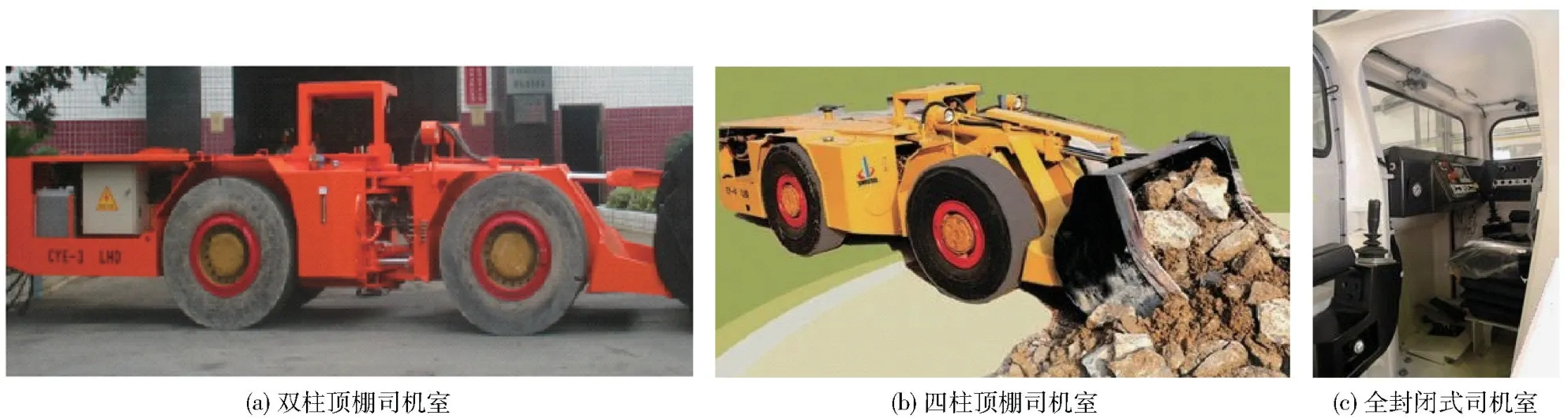
圖1 司機室外形結構
1 司機室的設計
司機室的設計的內容包括司機室的位置、座位、控制器、操縱桿、踏板、緊急停車、儀表盤、附件存儲、出入口的設計。
1.1 司機室的位置
司機室的位置,有的在前車架一側;有的在后車架一側。司機室在前車架一側,如圖2 所示。由于離工作機構很近,司機容易受到鏟斗溢出的物料傷害。司機室在后車架一側,司機的能見度較差,但安全性好。兩種方式各有優點和缺點,應根據地下鏟運機的具體情況選擇。司機室的內部布置、內部空間應符合有關標準的要求。司機室位置與結構不應干涉司機的視野,司機室內工作區不能存在任何可能損傷操作者的銳角、利棱、凹凸不平的表面和凸出的部位。

圖2 司機室的位置
1.2 座位
座位設計一般包括座位底坐、靠背、頭靠、扶手和懸浮裝置設計。由于車輛司機室空間限制和方便司機入坐,一般座位不安裝扶手。對超低矮型地下鏟運機來說,無法安裝懸浮裝置,只能安裝一定厚度的泡沫彈性坐墊,司機需躺著操作。對低矮型地下裝載機來說,根據機型的不同安裝座位,有的座位可以安裝懸浮,有的不可以安裝,司機可坐著或躺著操作。無論是坐著還是躺著操作,座位的設計應滿足人機工程學原理:滿足第5 百分位數到第95 百分位數人群身體尺寸;能最大限度地吸收振動;能舒適地操作;能方便維修;能最大限度的保證司機的視覺;能安全的承受司機的大部分重量;坐墊、腰靠、扶手的覆蓋層應柔軟、防滑、透氣、吸汗、無毒。
1.3 控制器
控制器包括操縱桿、腳踏板、緊急制動、儀表盤、礦工帽和礦燈蓄電池、附件等。
1.4 操縱桿
各操縱桿必須布置在司機的操縱舒適區及可及范圍;操縱力、操作方向、操作速度、操作行程都應與人的施力和運動輸出特性相適應。操作桿、按鈕與相鄰零件之間必須保持一定的間隙,操縱桿的操作運動與顯示器或被控對象,應有正確的運動協調關系,此種關系應與自然的人為傾向一致。
1.5 踏板
腳踏板一般有油門踏板與制動踏板兩種。油門踏板由于經常操作,一般放在座椅前右側,制動踏板一般不經常操作,放在座椅前左側。油門踏板和制動踏板必須要在司機的操作舒適區和可及范圍。腳踏力應小于有關標準的規定,踏板之間、腳踏板與相鄰零件之間的間隙都必須保持一定的距離。腳踏板與座位必須保持適宜的位置關系,有利于人向踏板施力。
1.6 緊急制動
若設計手啟動或按鈕啟動,考慮到用右手很快而且很容易從司機室內或室外(貼著駕駛室)啟動,應將緊急制動布置在司機的右側。另一個緊急制動應放在機器另一側的后面,通過兩個緊急制動,我們可以從機器兩側使用緊急制動來確保車輛、司機與周圍人員的安全。
1.7 儀表盤
儀表盤應布置在可視區內。當儀表盤的儀表數量較多時,對它們的排列可根據它們的功能分區排列,區與區之間應有明顯區別。最常用、最主要的儀表應盡可能安排在視野中心3 度的范圍內,一般性儀表可安排在20~40 度視野范圍內,次要儀表應安排在40~60 度的范圍內。
1.8 附件存儲
司機有時要脫掉他們的礦燈帽和電池包,因此必須設置此物存儲的地方,該地方應方便司機取下。
1.9 出入口
為方便司機安全順利的進出司機室,司機上、下司機室能同時使用一只腳和兩只手,或一只手和兩只腳三點著力的裝置。為從地面進入到司機室和坐著位置的司機提供抓手。抓手的表面不應粗糙,不能有傷手的尖角或延出物。
2 攝像機系統的設計
攝像機系統是為了幫助低矮型LHD 司機在坑道內駕駛時能看到前面、后面和右側面,從而提高司機駕駛時的能見度,增加司機與車輛安全。為了有最大的視野,攝像機的鏡頭應布置在地下裝載機的右前方和后左側。監視器應布置在司機室的中央和司機頭部正前方視野最大、障礙最少的地方。
攝像系統是由彩色(或是黑色和白色)監視器、視頻開關、前后攝像機、24 V 直流電源和組成,其原理如圖3 所示。
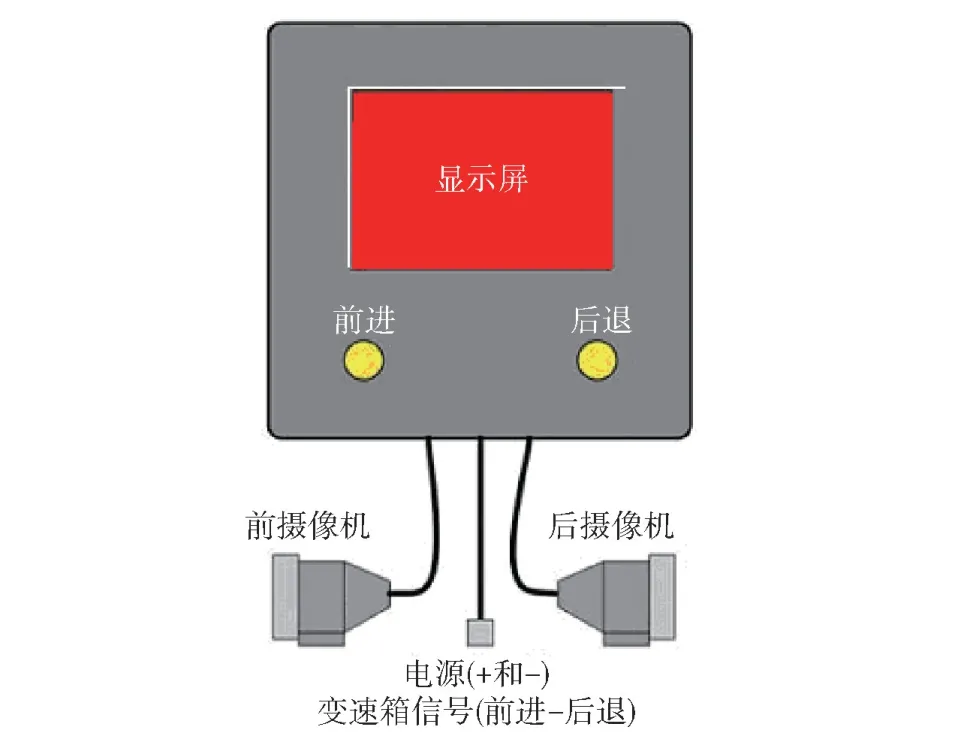
圖3 攝像系統原理圖
監視器外殼裝在車輛儀表板上,它由彩色監視器,“前進”和“后退”手動操作按鈕和視頻開關繼電器組成。繼電器是由車輛變速箱“前進”和“后退”信號控制。
按鈕亮,說明攝像機在工作,該指示燈由車輛變速箱或手動操作按鈕控制。
在監視器內,調節電位計可用來調節LCD 監視器、顏色、亮度和對比度。
可采用兩種攝像系統,攝像機器在十分牢固的特別設計的殼體內,保護攝像機及鏡頭以防止碎石和灰塵的破壞。
攝像機電纜繩包括DC 電纜和同軸電纜。PMA柔性管保護DC 電纜和同軸電纜。兩端聯接的安全由重型圓形連接器保護。攝像機配置了廣角鏡頭,以擴大司機的視野。電纜有各種長度,以備任何LHD 的需要。
3 地下鏟運機能見度設計要求
為了使接近車輛的礦工危險性最小,個子低的司機必須能看到主要區1 m 高以上、次要區1.3 m以上目標。該區取自車輛外圍0.5 m 的距離范圍,如圖4 所示。

圖4 人機工程學項目
在考慮了這些觀察目標時,視線限制是由于采用了低座椅和為了方便司機向前、向后駕駛,司機室定位在車輛中部而產生的。對前主要區的觀察應考慮裝滿物料的鏟斗和平臺上大的裝載物。
為了滿足司機能觀察這些目標,還要考慮:在設計駕駛棚支承、大燈、儀表盤和蓋板時,要避免妨礙司機對車輛周圍臨界區的觀察[3]。
4 落物保護結構試驗與翻車保護結構試驗
落物保護結構試驗(FOPS)即司機室頂部設置加強防護頂板,防止被具有一定能量落物擊穿或過量變形。翻車保護結構試驗(ROPS)即車輛發生傾翻時,避免或減少司機傷亡的保護裝置。這兩種保護結構試驗包括:試驗設備、試驗條件、試驗方法或試驗程序、試驗結果分析與評估及試驗實例等幾項內容[4]。
落物保護結構試驗設備:試驗用落錘是兩端直徑不同的標準鋼制圓柱體,柱體形狀及參考尺寸如圖5 所示。試驗控制的參數是重錘自由落下碰撞到試件時,產生的能量為11 600 J。落錘的質量及尺寸隨墜落高度的不同而有所改變如圖6 所示。當落錘提升到需要的高度釋放時,不能受任何妨礙。注:若落錘質量為227 kg,d=255~260 mm,l=583~585 mm。其墜落高度可由圖6 查得。

圖5 標準落錘

圖6 產生11 600 J 能量矽形的落錘高度和質量關系曲線
對翻車保護結構進行試驗時,在水平面內沿側向、縱向和垂直方向(如圖7、8、9 所示)由油缸加載,油缸的推力和行程應滿足試驗要求。試驗過程中應隨時測量施加給翻車保護結構的力和施加給框架的力以及框架的變形。力的測量可用力傳感器或加載油缸上壓力傳感器;位移測量可采用位移傳感器。力與變形的測量精度應為測量最大值的±5%。

圖7 油缸橫向加載

圖8 油缸縱向(沿車輛縱向)加載

圖9 油缸垂直加載
5 結束語
地下裝載機司機室的設計受到巷道尺寸的限制,司機室空間設計有一定難度,結構緊湊,但必須保證方便司機出入,安全性要滿足FOPS/ROPS 試驗要求,要設計出一個全新型的駕駛室要遵循上述原則和要求,外觀造型盡量設計美觀[5]。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
