基于寒鴉配對交互行為的無人機(jī)集群編隊(duì)控制
2021-03-26 04:01:56張令段海濱雍婷鄧亦敏魏晨
北京航空航天大學(xué)學(xué)報(bào) 2021年2期
張令,段海濱,*,雍婷,鄧亦敏,魏晨
(1.北京航空航天大學(xué) 自動(dòng)化科學(xué)與電氣工程學(xué)院 飛行器控制一體化技術(shù)重點(diǎn)實(shí)驗(yàn)室 仿生自主飛行系統(tǒng)研究組,北京100083;2.鵬城實(shí)驗(yàn)室,深圳518000; 3.信息系統(tǒng)安全技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京100101)
無人機(jī)(Unmanned Aerial Vehicle,UAV)具有風(fēng)險(xiǎn)小、成本低、環(huán)境適應(yīng)力強(qiáng)等優(yōu)點(diǎn),在民用和軍事任務(wù)中的應(yīng)用越來越多。單個(gè)無人機(jī)由于自身資源有限,無法執(zhí)行大規(guī)模任務(wù),為適應(yīng)新的任務(wù)需求,多無人機(jī)集群逐漸成為無人機(jī)領(lǐng)域的研究熱點(diǎn)。多機(jī)相互協(xié)作,可實(shí)現(xiàn)單機(jī)資源的充分利用,完成更為復(fù)雜的任務(wù)[1]。何呂龍等[2]設(shè)計(jì)分布式控制協(xié)議,解決了有向通信拓?fù)浜蜁r(shí)延條件下的無人機(jī)集群時(shí)變編隊(duì)控制問題;馬鳴宇等[3]采用事件驅(qū)動(dòng)控制方法,實(shí)現(xiàn)了多無人機(jī)系統(tǒng)的協(xié)同控制;Rosa等[4]通過滾動(dòng)時(shí)域控制方法,實(shí)現(xiàn)了無人機(jī)復(fù)雜隊(duì)形的控制與保持。
無人機(jī)集群控制與生物群體智能行為存在相似性,生物群體通過簡單的局部交互規(guī)則,可實(shí)現(xiàn)有序協(xié)調(diào)的集群運(yùn)動(dòng),勝任遠(yuǎn)超個(gè)體能力的復(fù)雜任務(wù)。將生物智能和仿生科學(xué)的研究成果應(yīng)用于無人機(jī),是提升無人機(jī)集群技術(shù)的重要思路,并且生物集群理論在多機(jī)器人系統(tǒng)中的應(yīng)用已經(jīng)逐漸成熟[5-7]。將生物群體智能映射于無人機(jī)集群控制,需要先建立集群模型,通過具有簡單交互規(guī)則的模型,重現(xiàn)生物的復(fù)雜群體行為[8],再將模型的交互和運(yùn)動(dòng)決策規(guī)則與無人機(jī)控制系統(tǒng)結(jié)合,在無人機(jī)上實(shí)現(xiàn)模型的控制方案。
目前,集群建模的研究重心在個(gè)體運(yùn)動(dòng)決策上,即在個(gè)體的交互鄰居集合已知后,研究如何根據(jù)個(gè)體自身和鄰居的交互信息,進(jìn)行下一時(shí)刻的運(yùn)動(dòng)決策,而對個(gè)體間的交互機(jī)制研究較少[9]。
生物群體的交互機(jī)制主要分為分層領(lǐng)導(dǎo)交互模式和固定鄰居距離交互模式[10]。Couzin模型[11]和Vicsek模型[12]都采用固定鄰居距離交互模式,個(gè)體一定距離內(nèi)的所有鄰居都是其交互對象。固定鄰居距離交互模式有很強(qiáng)的環(huán)境適應(yīng)性,缺點(diǎn)是通信量較大。邱華鑫等[13-14]通過模仿鴿群層級機(jī)制,提出了一種基于鴿群行為的多無人機(jī)集群控制模型,實(shí)現(xiàn)了無人機(jī)間交互模式的切換并完成同步性分析。分層領(lǐng)導(dǎo)交互模式的通信量更小,但是面對部分個(gè)體通信丟失等復(fù)雜情況缺乏適應(yīng)性。
Ballerini等[15]發(fā)現(xiàn),椋鳥只與其距離最近的6~7個(gè)鄰居進(jìn)行交互,并且交互對象數(shù)量穩(wěn)定,不受個(gè)體間距影響,稱之為拓?fù)浣换ィ═opological Interactions)現(xiàn)象。拓?fù)浣换C(jī)制已經(jīng)過理論證明[16],并在魚群實(shí)驗(yàn)中[17-18]得到驗(yàn)證。在通信負(fù)載方面,拓?fù)浣换サ膫€(gè)體鄰居數(shù)量遠(yuǎn)小于固定鄰居距離交互的數(shù)量。Ling等[19-20]在對寒鴉群的觀測中發(fā)現(xiàn),寒鴉群由于一夫一妻制形成特有的交互模式,群體中有15% ~70%的個(gè)體一對一配對飛行,稱之為配對交互。沒有配對的寒鴉使用拓?fù)浣换ィ换シ秶鸀?~8個(gè);配對寒鴉在其一側(cè)只與配對對象交互,另一側(cè)則采用拓?fù)浣换ィ换シ秶s為非配對個(gè)體的一半,減小2~3個(gè)交互對象,因此配對交互的通信量較拓?fù)浣换ジ佟S^測數(shù)據(jù)證明,配對交互模式也減小了寒鴉的飛行能量消耗。
本文通過模仿寒鴉的配對交互機(jī)制,提出了一種基于寒鴉配對交互行為的集群編隊(duì)控制模型,對于集群中的配對個(gè)體和未配對個(gè)體,分別研究其交互運(yùn)動(dòng)特性,將所提模型映射于無人機(jī)集群編隊(duì)控制。實(shí)驗(yàn)結(jié)果表明,配對交互模型的應(yīng)激能力更強(qiáng),而且合適的配對比例能在保證無人機(jī)集群聚集性的同時(shí),顯著減小機(jī)間通信負(fù)載。
1 寒鴉配對交互行為機(jī)制建模
1.1 配對交互鄰居選擇機(jī)制
在寒鴉群中,未配對的個(gè)體采用拓?fù)浣换ァ楸硎就負(fù)浣换プ饔茫f個(gè)體采用固定鄰居距離交互模式,將交互距離Ri以內(nèi)的個(gè)體作為其鄰居,并對Ri作動(dòng)態(tài)調(diào)整[21],使交互鄰居數(shù)量基本保持在期望值。寒鴉個(gè)體交互鄰居的集合為

式中:dij(t)為個(gè)體i與個(gè)體j的實(shí)際距離;N為寒鴉群數(shù)量;交互距離不大于感知半徑,即Ri(t)≤Rsen。
交互距離調(diào)整規(guī)則[21]為



式中:αi(t)為個(gè)體i當(dāng)前速度方向;xi(t)、yi(t)和xj(t)、yj(t)分別為個(gè)體i和個(gè)體j的位置坐標(biāo)。
1.2 基于社會(huì)力的集群動(dòng)力學(xué)模型
1.2.1 社會(huì)力框架
考慮個(gè)體數(shù)量為N的集群系統(tǒng),在三維無障礙空間運(yùn)動(dòng),個(gè)體i的位置向量為xi∈R3,速度向量為vi∈R3,不考慮個(gè)體形狀,其質(zhì)量為mi。參考文獻(xiàn)[13],寒鴉個(gè)體的運(yùn)動(dòng)微分方程描述如下:


個(gè)體i受到個(gè)體j的位置協(xié)同力和速度協(xié)同力分別為

式中:xij表示由個(gè)體i指向個(gè)體j的單位向量;dexp為個(gè)體間期望距離;λ為位置協(xié)同力隨個(gè)體間距的衰減系數(shù);kpos為位置協(xié)同系數(shù);kvel為速度協(xié)同系數(shù)。
1.2.2 未配對寒鴉的協(xié)同力
與未配對寒鴉個(gè)體交互的每一個(gè)鄰居的地位都相同,所以其位置協(xié)同力和速度協(xié)同力取各個(gè)鄰居的均值:

1.2.3 配對寒鴉的協(xié)同力
配對寒鴉在其一側(cè)只與配對對象交互,故先將另一側(cè)的位置和速度協(xié)同力取均值,再與其配對對象的加權(quán)求和。


2 無人機(jī)集群控制
2.1 無人機(jī)模型
假定固定翼無人機(jī)配置有速度、航向角和高度3個(gè)回路的自駕儀,則無人機(jī)模型[23]可簡化為

式中:vc、hc和χc分別為水平速度、高度和航向角控制輸入指令;(x,y,h,v,χ,)為無人機(jī)的6個(gè)狀態(tài)值,分別表示無人機(jī)三軸位置、水平速度、航向角和高度變化率;αχ、αv、和αh為自駕儀控制參數(shù)。
考慮無人機(jī)的飛行限制條件:

式中:vmin>0和vmax>0分別為無人機(jī)最小航速和最大航速;ωmax>0為無人機(jī)最大航向角速度的絕對值。
2.2 集群動(dòng)力學(xué)模型與無人機(jī)模型的映射關(guān)系
式(5)計(jì)算所得的集群控制量ui通過指令解算[13],可得到無人機(jī)的自駕儀控制輸入:


無人機(jī)模型的狀態(tài)輸出值可轉(zhuǎn)換為無人機(jī)的位置和速度向量,作為集群動(dòng)力學(xué)模型的輸入:

3 仿真結(jié)果分析
3.1 集群運(yùn)動(dòng)評價(jià)指標(biāo)
3.1.1 序參量
通常使用序參量(Order Parameters)來描述集群運(yùn)動(dòng)的有序性,該方法由Vicsek等[12]提出,本文采用極化指數(shù)作為序參量。極化指數(shù)刻畫集群中所有無人機(jī)運(yùn)動(dòng)方向趨于一致的程度,極化指數(shù)φ∈[0,1]越大,則集群運(yùn)動(dòng)的一致性程度越高,設(shè)定極化指數(shù)閾值φflock,當(dāng)極化指數(shù)大于φflock,則認(rèn)為集群的有序性良好。

式中:N 為集群無人機(jī)數(shù)量;vi為無人機(jī)i的速度。
3.1.2 尺度指數(shù)
尺度指數(shù)為所有無人機(jī)到集群中心點(diǎn)距離的平均值,表示集群的聚集程度,尺度指數(shù)越小,聚集程度越高,定義如下:

3.1.3 通信負(fù)載
通信負(fù)載Nnb(t)定義為時(shí)刻t集群無人機(jī)的平均鄰居數(shù)量,平均數(shù)量越小,則通信負(fù)載越小。

式中:Ni(t)為t時(shí)刻無人機(jī)i的交互鄰居數(shù)量。
3.1.4 應(yīng)激精度
應(yīng)激精度δ表示在刺激后集群運(yùn)動(dòng)方向與刺激方向的接近程度,δ=0表示刺激后所有集群無人機(jī)均未改變運(yùn)動(dòng)方向,δ=1表示集群無人機(jī)已經(jīng)與刺激方向一致。對于單向刺激,定義如下:

式中:qi為無人機(jī)i的單位化速度向量,表示運(yùn)動(dòng)方向;qsti為刺激方向;q0為刺激之前集群的運(yùn)動(dòng)方向,qsti和q0均為單位向量。
3.2 集群參數(shù)設(shè)置
集群參數(shù)設(shè)置如表1所示。

表1 集群參數(shù)設(shè)置Table 1 Swarm parameter setting
3.3 仿真分析
3.3.1 配對比例
設(shè)定每次仿真時(shí)間50 s,步長0.05 s。其他參數(shù)保持不變時(shí),通過改變集群中配對無人機(jī)的比例ppair,研究其對集群性能的影響。配對比例表示配對無人機(jī)數(shù)量與集群數(shù)量的比值,集群數(shù)量取10,配對比例ppair分別取值0、20%、40%、60%、80%、100%。配對比例為0、40%和80%的三維軌跡曲線如圖1所示,圖2~圖4分別為集群的極化指數(shù)、尺度指數(shù)和平均鄰居數(shù)量隨時(shí)間的演化曲線。

圖1 不同配對比例時(shí)的三維軌跡曲線Fig.1 3D trajectory curves changing with pairing ratio

圖2 極化指數(shù)隨配對比例變化曲線Fig.2 Curves of polarization exponent changing with pairing ratio
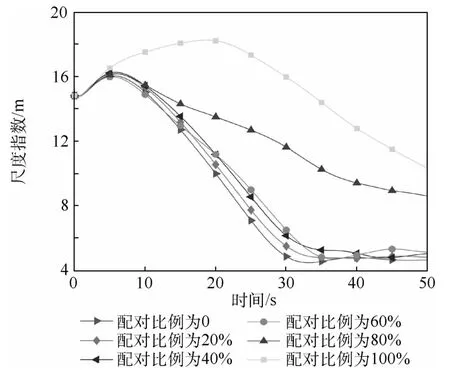
圖3 尺度指數(shù)隨配對比例變化曲線Fig.3 Curves of scale exponent changing with pairing ratio
極化指數(shù)圖中,虛線為極化指數(shù)閾值。配對比例從0變化到100%,逐漸增大,不同配對比例下的序參量演化曲線重合,在1.95 s時(shí)超過閾值并穩(wěn)定在閾值以上。尺度指數(shù)圖中,配對比例為0、20%、40%、60%的尺度指數(shù)變化趨勢一致,最終穩(wěn)定在5 m附近,而配對比例為80%和100%的尺度指數(shù)較大,在50 s時(shí)其值分別為8.6m和10.4m。平均鄰居數(shù)量圖中,配對比例每增大20%,平均鄰居數(shù)量約減小1個(gè),集群的通信負(fù)載隨配對比例增大顯著減小。由仿真結(jié)果可見,配對比例越高,集群通信負(fù)載越小,合適的配對比例能保證集群的一致性和聚集性,當(dāng)配對比例超過一定閾值時(shí),集群的尺度指數(shù)增大,聚集性降低。分析原因是:未配對無人機(jī)的交互鄰居多,交互范圍大,能減小集群的尺度指數(shù),而高配對比例導(dǎo)致無人機(jī)的交互鄰居數(shù)量減小,使集群的聚集性下降。保證聚集性的配對比例閾值應(yīng)在60% ~80%之間,仿真結(jié)果也符合寒鴉飛行時(shí)維持15% ~70%配對比例的觀測結(jié)論。

圖4 平均鄰居數(shù)量隨配對比例變化曲線Fig.4 Curves of average number of neighbors changing with pairing ratio
3.3.2 應(yīng)激響應(yīng)特性
研究集群對于單向刺激的響應(yīng)特性,設(shè)定集群中部分無人機(jī)在某時(shí)刻改變其運(yùn)動(dòng)方向且固定,其他參數(shù)保持不變時(shí),分析信息無人機(jī)占比對應(yīng)激精度的影響,給出定義如下:信息無人機(jī)占比為改變運(yùn)動(dòng)方向的無人機(jī)數(shù)與集群無人機(jī)總數(shù)比值。
設(shè)定每次仿真時(shí)間100 s,步長0.05 s。集群數(shù)量取10,信息無人機(jī)在t=15 s時(shí)航向角減小30°,進(jìn)行2次不同的仿真:信息無人機(jī)占比分別為10%、20%,每次仿真進(jìn)行配對比例0和40%的對比,其中配對比例為40%時(shí),信息無人機(jī)均為配對無人機(jī)。信息無人機(jī)占比為10%的三維軌跡曲線和應(yīng)激精度隨時(shí)間演化曲線如圖5和圖6所示,信息無人機(jī)占比為20%時(shí)如圖7和圖8所示。
由圖5可見,信息無人機(jī)占比10%時(shí),配對比例為40%的集群對刺激響應(yīng)更明顯。信息無人機(jī)i對其配對對象j的協(xié)同力較大,使得j向i靠近和速度匹配的趨勢比其他無人機(jī)更大。在其他無人機(jī)和i的協(xié)同力的共同作用下,j的位置和速度方向都處于i與其他無人機(jī)之間,這也使其他無人機(jī)的運(yùn)動(dòng)方向更加接近信息無人機(jī),形成更大的應(yīng)激精度。

圖5 不同配對比例時(shí)10%信息無人機(jī)占比三維軌跡曲線Fig.5 3D trajectory curves changing with pairing ratio with information UAV ratio of 10%

圖6 10%信息無人機(jī)占比下應(yīng)激精度隨配對比例變化曲線Fig.6 Curves of stimulation accuracy changing with pairing ratio with information UAV ratio of 10%

圖7 不同配對比例時(shí)20%信息無人機(jī)占比三維軌跡曲線Fig.7 3D trajectory curves changing with pairing ratio with information UAV ratio of 20%

圖8 20%信息無人機(jī)占比下應(yīng)激精度隨配對比例變化曲線Fig.8 Curves of stimulation accuracy changing with pairing ratio with information UAV ratio of 20%
信息無人機(jī)占比為20%時(shí),配對比例為0的集群的應(yīng)激精度在刺激初期緩慢增加,隨著信息無人機(jī)與其他無人機(jī)的距離增大,其協(xié)同力逐漸消失,應(yīng)激精度最終穩(wěn)定為0.3;而配對比例為40%時(shí),集群的應(yīng)激精度遠(yuǎn)大于配對比例為0,在100 s時(shí),集群的運(yùn)動(dòng)方向已基本和信息無人機(jī)一致。可見當(dāng)信息無人機(jī)中存在配對無人機(jī)時(shí),集群的應(yīng)激精度更高。
4 結(jié) 論
針對多無人機(jī)集群控制問題,受寒鴉群配對飛行行為機(jī)制的啟發(fā),本文提出了一種配對交互模型,通過一定比例的無人機(jī)配對,減小集群無人機(jī)的交互鄰居數(shù)量,從而減小通信負(fù)載。
1)通過2組仿真實(shí)驗(yàn)研究所提模型的特性,驗(yàn)證了集群的配對比例越高,其通信負(fù)載越小,但是需要控制合適的配對比例,以保證集群的一致性和聚集性,配對比例的上限應(yīng)在60% ~80%之間。
2)對于單向刺激,當(dāng)信息無人機(jī)中有配對無人機(jī)時(shí),集群更容易對刺激做出響應(yīng),應(yīng)激精度更高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中外會(huì)展(2014年4期)2014-11-27 07:46:46
中學(xué)數(shù)學(xué)雜志(初中版)(2006年1期)2006-12-29 00:00:00
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
