某型復雜光電設備對抗模擬訓練倉人機交互系統設計
2021-03-26 13:48:30謝建華劉德亮
科教導刊·電子版 2021年1期
謝建華 劉德亮 翟 優 何 鵬
(陸軍工程大學石家莊校區四系 河北·石家莊 050003)
某型復雜光電設備現有的模擬訓練器材,其仿真的真實感、沉浸感較差,視景顯示往往采用二維圖像的方式,無法模擬真實的三維運用環境;訓練僅限于操作手的操作,沒有車長和駕駛員的訓練內容,無法實現協同訓練;只能在實裝上進行摸索,對實裝損傷較大,而且用實裝進行訓練受客觀條件的限制,且訓練內容單一,無法實現復雜條件下的對抗訓練,難以滿足教學和訓練需求。因此,用模擬訓練倉進行訓練,對于提高廣大訓練人員的訓練質量,節省訓練時間,達到甚至超過實際設備的訓練效果有著重要的作用。
而人機交互系統作為受訓人員進行對抗操作訓練非常重要的組成部分,對人機交互系統的感受是否真實直接影響訓練效果的好壞。因此,良好的人機交互系統是訓練的重要條件之一。
1 模擬訓練倉整體結構
本模擬訓練倉功能上具備全方位、全過程的特征:包含全系統操作訓練,涵蓋車輛行進、展開、對抗等全過程的動作訓練。該模擬訓練倉的整體結構如圖1所示。
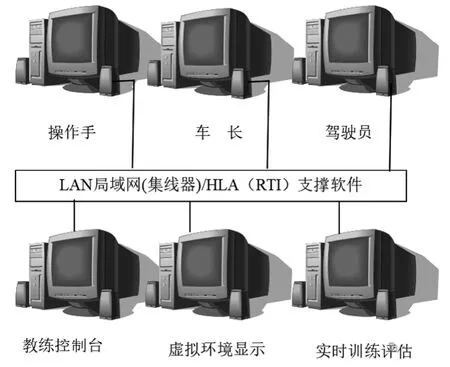
圖1:模擬訓練倉整體構成示意圖
本模擬訓練倉由操作手操作訓練系統、車長操作訓練。
系統、駕駛員操作訓練系統、虛擬訓練環境系統、訓練評估系統、和教練臺6個系統構成,整個模擬訓練環境采用分布仿真高層體系結構(HLA/RTI)構建多聯邦體系結構,實現車內乘員之間的互聯互操作。
2 人機交互系統設計
2.1 駕駛員人機交互子系統設計
駕駛員人機交互系統的設計主要采用物理效應設備和位置跟蹤器相結合的方式,實現駕駛員駕駛過程中各種操作動作與虛擬訓練環境之間的交互,由物理效應設備代替真實方向盤、剎車、油門,將三自由度的空間位置跟蹤器綁定在駕駛員方向盤上,實時獲取方向盤轉動的角度數據,同時在油門和剎車上也綁定三自由度的位置跟蹤器,獲取相應的角度變化數據,根據相應的數學模型和角度變化的數據控制與虛擬場景的交互,如:加速、減速、轉彎、剎車等動作與場景的交互,該子系統的示意圖如圖2所示。
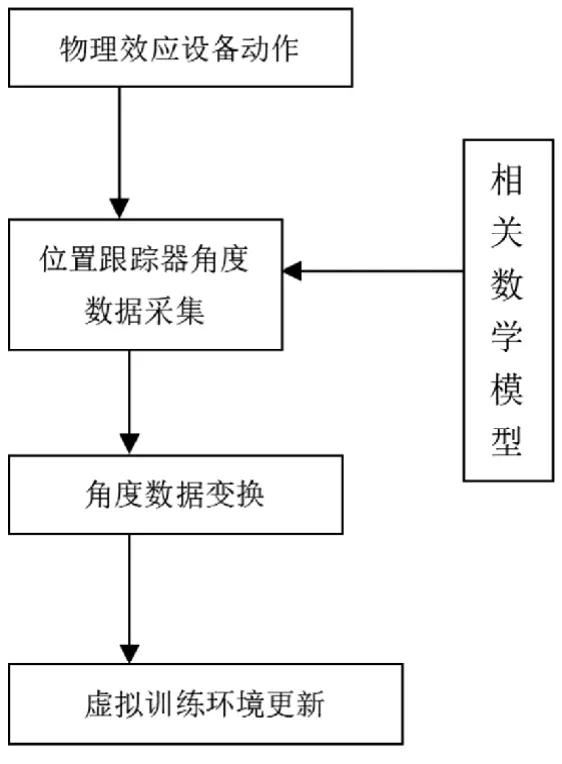
圖2:駕駛員人機交互子系統示意圖
2.2 車長人機交互子系統設計
人機交互子系統設計主要是由應用物理效應設備、單目顯示器、三自由度位置跟蹤器等設備組成,子系統的示意圖如圖3所示。
車長所要進行交互的目標主要是車長鏡,因此對于車長鏡的仿真主要是應用物理效應設備,物理效應設備的外觀和車長鏡完全一致,包括觀察孔的位置、大小和光學觀瞄鏡;在圖3所示的車長鏡觀察孔的位置,在車長鏡等效物理效應設備內部設置一部單目顯示器,用于顯示虛擬訓練環境,以模擬真實訓練中車長通過車長鏡觀察外部訓練環境,如圖3中虛線的矩形方框所示。
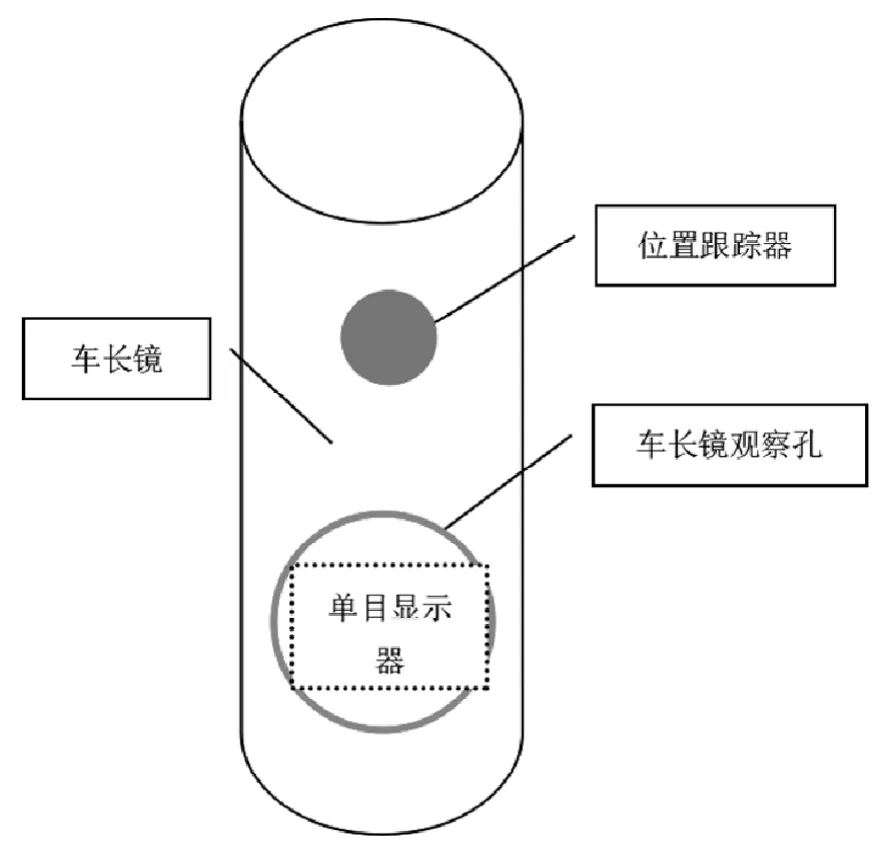
圖3:車長人機交互子系統示意圖
而圖3中所示位置跟蹤器的作用主要是用來實時測量車長鏡等效物理效應設備的三自由度角度數據,實時刷新車長所觀察到的虛擬訓練環境。
2.3 操作手人機交互子系統設計
操作手在該系統中所要參與的人機交互動作是最多的,操作手在整個訓練過程中要在車長的指引下完成復雜的操作動作,因此操作手人機交互子系統的交互也是該系統中最復雜的。操作手人機交互子系統主要分成兩部分,分別是操作手操作控制面板的仿真和控制系統的仿真。
首先介紹操作手操作控制面板的仿真,操作控制面板的仿真如圖4所示。
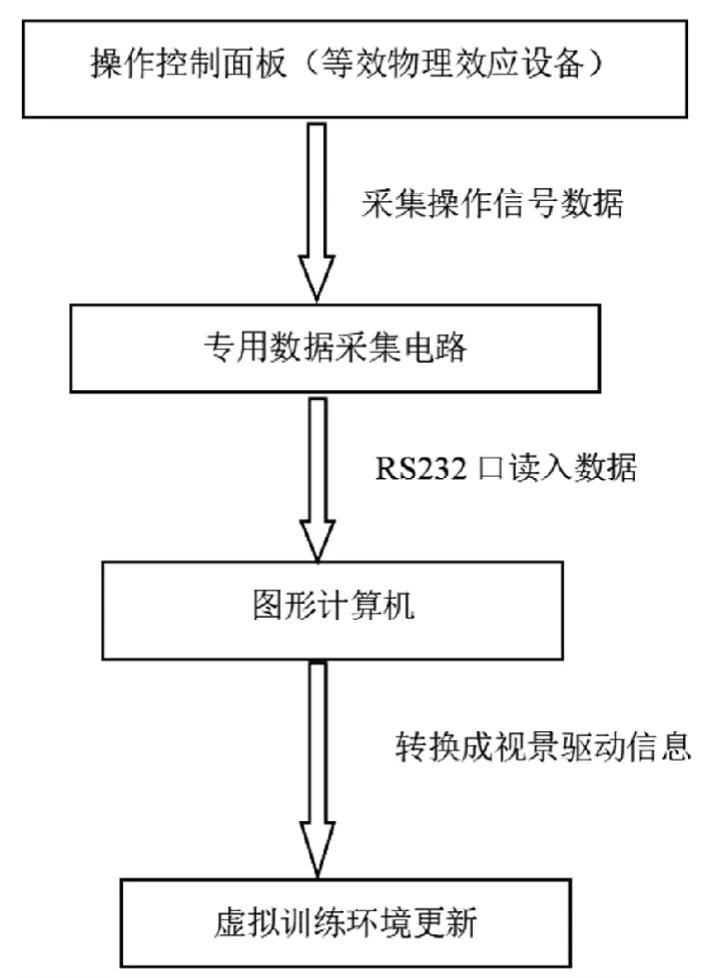
圖4:控制面板人機交互示意圖
操作控制面板采用等效物理效應設備,開關、按鈕采用大小、力度與原物理系統相同的部件,同時應用由專用數據采集電路實時采集控制面板操作數據,進行處理后,通過RS232口將數據送入圖形處理計算機,數據經圖形處理計算機處理后驅動虛擬訓練環境進行刷新。
接下來,介紹控制系統的仿真,控制系統的仿真如圖5所示。

圖5
光學瞄準具采用與車長鏡人機交互子系統類似的裝置供操作手在虛擬訓練環境中搜索和跟蹤目標,控制桿采用綁定三自由度位置跟蹤器的物理效應設備,工作中通過三自由度位置跟蹤器實時采集相應的角度數據,輸入到計算機中進行處理,并和相應的數學模型進行匹配,真實模擬目標飛行的參數數據,轉換成視景驅動信息,從而控制虛擬訓練環境的更新。
3 技術途徑
該人機交互系統的物理效應設備的制作主要通過自主設計,委托生產的方式進行。該人機交互系統的軟件部分需在VC++集成開發環境中進行開發。在VC++集成開發環境中實時讀入位置跟蹤裝置采集的數據和數據采集卡采集的操作信息,對數據進行實時處理,在匹配數學模型的基礎上,轉換成視景驅動信息,驅動虛擬訓練環境的刷新。
4 結束語
本文詳細闡述了復雜光電設備對抗模擬訓練倉人機交互系統的設計,并對各個分系統的具體人機交互行為給出了實現方案,為該模擬訓練倉的研制打下了堅實的基礎。
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
中國生殖健康(2019年11期)2019-01-07 01:28:02
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
工業設計(2016年12期)2016-04-16 02:52:00