基于伺服電機驅動的《現代電氣控制技術》教學改革探索
2021-03-27 04:55:08岳偉挺曹月花
教育現代化 2021年102期
岳偉挺,曹月花
(杭州電子科技大學 信息工程學院,浙江 杭州)
一 引言
伺服電機驅動系統是以變頻技術為基礎發展起來的產品,是一種以機械位置或角度作為控制對象的自動控制系統。伺服系統除了可以進行速度與轉矩控制外,還可以進行精確、快速、穩定的位置控制,廣泛應用于包括工業機器人、數控機床在內的智能制造領域。隨著我國制造產業轉型升級,伺服控制技術的應用范圍正逐漸擴大,對伺服控制技術的人才需求日益增加。近年來隨著大學生科技競賽活動的推廣,以中國智能制造領域規模大、規格高的國家A類競賽 “西門子杯”中國智能制造挑戰賽為例,設置了以伺服電機應用為基礎的運動控制分項賽,這從側面也反映出國內制造領域對伺服控制人才的現實需求。
我校作為應用型本科高校,本科生就業主戰場和優勢領域是浙江地區龐大的先進制造產業和智能控制行業。因此,基于應用型人才培養的目標,以及教育部對高校產教融合、協同育人的教學指導方針,本課題在伺服電機控制技術方向進行了教學改革和探索。無論是理論教學還是實踐教學,重點符合智能制造產業與智能控制產業對人才能力的需求。把企業工程項目作為切入點,以伺服電機控制工程的項目為教學抓手,把企業的需求合理地融入到我校教學培養環節。本課題探索面向企業真實生產環境的任務式教學培養模式,為產業升級所需的應用型、技術技能型人才培養提供路徑保障。
二 伺服控制方向的教學現狀
(一)教學內容與課時分配不足
機電一體化伺服控制系統的結構、類型繁多,但從自動控制理論的角度來分析,伺服控制系統一般包括控制器、被控對象、執行環節、檢測環節、比較環節等五部分。伺服控制方向的教學內容,通常涵蓋于電機拖動技術、電力電子、電氣技術及PLC控制等多個課程內,沒有作為一門獨立課程列入教學計劃。因此,各高校教學內容和教學課時都是因地制宜、因校施策,根據各自的教學需求和就業需求進行安排。以《現代電氣控制技術及PLC原理》這門課程為例,伺服控制方向的課時為4~6課時。但是,各高校也都意識到伺服控制的教學是必要的,并有強烈的人才需求,在這個方向進行的教學改革符合產教融合的需要。
(二)教材缺乏
在國內電氣控制、機電控制的傳統教學計劃和教學大綱中,伺服電機控制方向并不是主要教學內容。因此在教材編著中,這一部分的內容比較缺乏。通常作為某一個選修章節,而不是重點教學內容。專門針對伺服控制方向的教材目前也非常缺乏,大部分高校是根據授課內容自編講義。
(三)實驗設備亟待更新
電氣控制方向的教學設備大都停留在傳統的交流三相電機的控制為主,基于伺服電機控制的實驗設備和平臺比較缺乏。理論教學缺少先進的實驗平臺的支撐。需要研究和制定技術先進、經濟實惠的實驗平臺建設方案,更新實驗設備和實踐教學手段。
三 理論教學的創新與實踐
針對目前國內高校自動化與電氣專業的教學和課程現狀,本課題以產教融合為基礎、以校企協同育人為手段,基于應用型人才培養目標,開展面向伺服驅動的現代電氣控制技術課程的教學改革。不僅讓學生掌握伺服控制的基礎理論,提高實踐技能,還要培養學生的創新能力與解決復雜工程問題的能力。為了達到這個目標,本課題在實施過程中,與工程領域的專家保持溝通,研究工程領域對自動化類人才的實際需求,調整教學計劃和課程,充實理論教學和實踐教學。把伺服市場的人才供求比例、就業質量作為教學培養的重要依據。我校與兆融(杭州)科技發展有限公司、杭州韋德伺服科技有限公司、北京博創尚和技術公司等合作,共建伺服驅動與控制實驗室,按照本科教學標準共同制定了在伺服電機控制方向的課程教學大綱。
理論教學改革的內容,重點是調整培養計劃和教學大綱,包括調整課程學分、課時分配、教學內容、考核考察內容、教材選用等。在滿足教學范圍和大綱的基礎上,課程內容與培養重點均要向伺服電機方向傾斜。在目前的教學內容中,培養計劃和教學大綱中涵蓋了伺服電機的原理與控制方法的教學,但并不作為各課程的主要部分或核心知識點。在我校目前的理論教學中,“現代電氣控制與PLC應用”課程傳統是以三相異步電機的學習為主,包括電機啟停控制、正反轉控制、順序控制等。通過課程調整,開展以伺服電機驅動與控制為核心的課程群建設。把教學范圍和教學重點,拓展到以伺服電機、步進電機的控制與應用為主,包括電機運行原理,PLC高速脈沖控制指令編程與傳感器、觸摸屏的綜合應用等。伺服電驅系統是以伺服電機為執行元件,使移動部件的位移及速度等被控量能夠跟隨輸入值變化的自動控制系統。伺服驅動與控制技術教學環節,任務就是講授伺服系統基本原理以及在工業自動化領域中的應用。教學改革之后的內容如圖1所示,不僅包含多種伺服電機驅動技術的理論知識,而且集成了系統設計和綜合應用等工程能力和實踐能力。
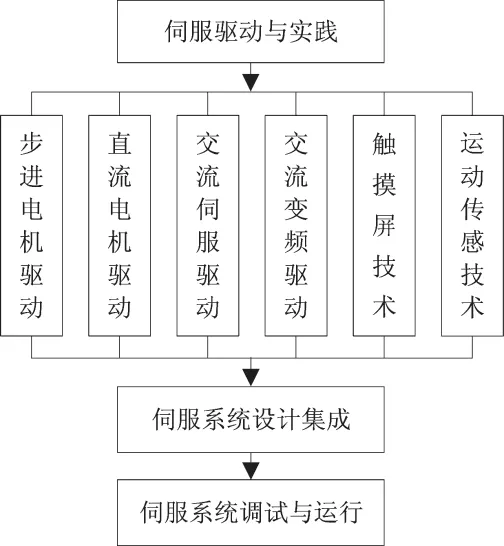
圖1 伺服驅動與控制方向的教學內容
本課題在實施過程中,修訂了2020級與2021級本科教學培養計劃和教學大綱,增加了伺服控制方向的課時。在“現代電氣控制及PLC應用”的教學計劃中,把該環節課時從4課時理論課,增加到8課時理論課及8課時實驗課。通過增加課時和學分,首先強化學生對伺服電機的基礎學習和應用,其次培養學生熟練掌握伺服系統設計技術和設計方法,并綜合運用控制理論、自動控制技術、機器視覺與人工智能等知識的能力,拓展工程視野。在教學內容的調整過程中,教師通過調研、培訓與學習、備課,更新自身的知識儲備,提高工程應用的業務能力,順利完成課程的改革和建設。
四 實踐教學體系的探索
(一)調整實踐教學內容
在我校實驗與實踐教學中,借助于近年的實驗室建設,目前已經能夠完成三相異步電機的大部分驅動控制實驗。但是也存在教學重點不突出、學生特色能力不明顯的問題,實驗教學內容不能貼合智能制造產業對電氣控制技術的需求。以電機控制的教學環節為例,常規的實驗內容項目眾多,可開設的實驗項目包括PLC控制三相異步電動機變頻調速實驗;三相異步電動機啟停控制與正反轉控制實驗等。通過本課題,實驗教學內容調整為以伺服電機為目標的實驗設備,完成以伺服電機速度控制、位移控制為核心的實驗內容。調整考核考察方向,加大對伺服電機應用能力的考核。2019年11月,我院機電工程系與兆融(杭州)科技發展有限公司、杭州韋德伺服科技有限公司聯合共建了伺服驅動與控制實驗室,提供了教學所需的基礎實驗環境和實驗設備。
(二)實行三段式實踐教學模式
在教學時間環節中,為解決伺服控制的過程復雜、綜合性強的問題,提出了三段式的實驗教學模式。把復雜工程問題分解為三個互相獨立又緊密相關的階段,即入門階段學習、提高階段學習和綜合應用階段學習。通過分層分類教學,把不同實驗室、不同實驗內容有機結合,逐步提高學生的實踐與應用能力。具體過程為:學生起步階段進行單機操作和單機學習,通過單軸驅動裝置的實驗,理解伺服控制的基本方法;在提高階段,通過雙軸、三軸的驅動裝置,完成相對復雜的具體任務;在綜合應用階段,結合工業機器人、機器視覺等設備,完成對伺服設備的綜合應用和控制。例如第一和第二階段,可根據交流伺服電機的位置控制模式及PLC高速脈沖輸出原理,設計交流伺服電機的PLC控制綜合性實驗。實驗內容包括設置交流伺服驅動器參數、電氣設計與連線、運用PLC的高速脈沖處理指令編制程序,以及控制電機按指定的速度運行、單軸快速定位和指定的加減速動作。通過不同層次和難度的實驗,鞏固和擴展理論知識、激發學習興趣、提高教學質量。
(三)探索虛擬仿真實踐教學
在實物實驗平臺的基礎上,為了拓寬伺服電氣控制技術的應用場景,本課題引入了基于虛擬仿真技術的實驗教學模式,延伸實驗教學時間和空間、提升實驗教學質量和水平。教學改革重點在于借助虛擬仿真技術,對基于伺服電機的復雜控制工程、工業機器人控制工程進行模擬仿真,通過形象、生動、具體的情景模擬和過程響應,動態地學習并理解電氣控制原理與程序控制。在虛擬仿真課時內,要求學生完成控制系統建模、設備運動軌跡控制、控制算法和控制參數的程序設定等。虛擬仿真實訓課程,可以與傳統教學模式無縫連接,學習階段和考核評價都有機結合。課程評價指標內容豐富,由淺入深,難度有不同等級,可以實現分層分類的教學和考核。該評價體系適合于應用型人才培養的目標和定位。
虛擬仿真克服了傳統教學的瓶頸,不受實驗設備數量和操作風險的影響;同時傳統的實物型實訓,可以對虛擬仿真的學習效果進行驗證。復雜的、有一定難度的傳統教學階段,可以在虛擬仿真環境中完成;到達一定熟練程度之后,再結合實物實訓來完成。此外,對具體的工程實際案例,也可在仿真平臺上實施模型搭建,實現由伺服電機與工業機器人等組成的虛擬場景功能。
采用虛擬仿真技術的離線編程與操作,采用直觀的用戶界面,便于搭建工作環境,創建坐標系,設定機器人與電氣設備的運動軌跡與目標。為多種工業設備應用預習設定進行離線編程。虛擬軟件的模型庫包含多個品牌的機器人、PLC控制器、伺服電機等設備。虛擬仿真將電腦上的3D模型與實物緊密地結合在一起,實現核心教學要素的仿真,使教學和知識傳播從二維走向了三維。
五 重視工程應用能力培養
為提高學生工程應用與實踐能力,采用了項目驅動、以賽促學的培養模式。在本教學改革中,工程能力就是伺服系統設計集成(即設計選型、接口設計、軟件設計等) 與現場調試的實踐能力。伺服運動控制技術課程理論性、實踐性、綜合性均較強,主要面向自動化技術領域培養具有伺服系統維護、設計與開發能力的高級應用型技術人才。課程教學內容不僅包括基本控制理論及應用,更強調伺服控制系統的設計與實現。目前,該課程群理論教學主要是講授包括伺服電機在內的各種電機控制與驅動原理,課程理論強、數學邏輯復雜,教學重理論輕實踐。市場和企業對具有伺服驅動工程能力的畢業生需求很大,這就迫切要求對課程教學方向和教學方法進行改革,培養學生實踐能力與工程能力,以適應企業的要求。
在本課題實施中,選擇了適合不同層次、不同能力的項目案例作為工程應用能力訓練項目,以通過項目驅動學習進程,以完成具體任務為本階段目標。在工程案例選擇上,結合我校本科生長期以來的就業擇業優勢領域,主要面向智能制造與智能控制的相關典型運動過程的伺服系統設計,如“機床加工專用設備伺服系統設計”“機器人關節臂伺服系統設計”“基于機器視覺的伺服系統設計”等。項目特點要小而精,學生利用開放實驗室、學生工作室,以及實驗課進行完成,并計入課程成績考核。難度稍高的項目被安排在課程設計、畢業設計以及大學生科技競賽中完成,另行考核。在系統設計與實現時,強調單片機、可編程邏輯控制器、機器視覺系統等多種控制系統在伺服系統中的綜合應用。
為了在實踐教學層面上探索產教融合的途徑,開展了學賽結合、以賽促學的模式。為拓展和延續伺服控制方向的學習,在校內組織成立了面向伺服控制的學習協會和競賽隊伍,并聘請產業公司的技術人員不定期進行實踐教學指導。近兩年組織指導學生參加了多項大學生科技競賽。例如第14屆、第15屆“西門子杯”智能制造挑戰賽 (教育部A類賽事),共有6名同學獲得省賽獎勵(1等獎1名,2等獎2名,3等獎3名),2名同學獲得了國賽獎勵(特等獎1名,二等獎1名)。通過學與賽的結合,讓學生學會綜合運用已學習的電氣控制專業知識,并引領學生組成伺服控制系統來解決智能制造領域中的電氣化、數字化、智能化問題,進一步提升學生的復雜工程應用能力。
六 結語
基于產教融合的培養方向,以培養應用型電氣工程師為具體目標,開展了現代電氣控制技術教學改革和實踐。通過我國智能制造產業轉型升級所急需的伺服控制技術人才為培養目標,開展了理論教學和實踐教學的改革,有效地幫助學生建立和提升工程意識。在現代電氣控制技術課程改革中,通過深化伺服電機控制的理論教學、開展層次豐富、遞進式的分層分類實驗教學,以及以賽促學、產教融合的實踐能力培養,從三個層面培養和提高學生在伺服控制領域的自主學習、分析問題、解決問題的能力,獲得良好的教學效果。實現了電氣控制技術教學服務于智能制造領域,為我國工業產業提供有力的人才和技術支撐,也體現了電氣控制技術課程的作用與特色。這個教學目標和模式,未來可進一步推廣到其他課程,全面提升電氣自動化教學與我國產業需求的融合程度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
通信電源技術(2018年5期)2018-08-23 01:16:18
課程教育研究(2017年40期)2017-11-17 16:29:05
電子制作(2017年19期)2017-02-02 07:08:54
山東工業技術(2016年15期)2016-12-01 05:31:49
中學歷史教學(2016年4期)2016-11-11 07:11:44
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中學歷史教學(2015年12期)2015-11-11 07:09:49