計算Lyapunov指數(shù)的模糊C均值聚類小數(shù)據(jù)量法
2021-03-27 01:22:14高允報孫玉泉
東北師大學(xué)報(自然科學(xué)版) 2021年1期
高允報,孫玉泉
(北京航空航天大學(xué)數(shù)學(xué)科學(xué)學(xué)院,北京 100191)
Lyapunov指數(shù)(LE)可以判斷動力系統(tǒng)的混沌狀態(tài),在研究混沌運動特性中起著非常重要的作用,是衡量動力學(xué)特性的一個重要定量指標(biāo),它表征了系統(tǒng)在相空間中相鄰軌道間收斂或發(fā)散的平均指數(shù)率[1].系統(tǒng)的混沌狀態(tài)可以通過LE的正負來判斷,所以研究如何計算LE就非常必要.
近年來國內(nèi)外學(xué)者對LE的計算方法做了很多研究.嚴(yán)雯等[2]利用定義法求解了Logistic模型的最大Lyapunov指數(shù)(LLE);Wolf等[3]利用Wolf法計算出幾種混沌系統(tǒng)的LLE;Rosenstein等[4]提出小數(shù)據(jù)量法來計算LLE.然而定義法只適用于計算已知系統(tǒng)的LE;Wolf法計算LLE時過程較為復(fù)雜且結(jié)果往往不精確;小數(shù)據(jù)量法在不知系統(tǒng)方程而僅可獲得離散數(shù)據(jù)的情況下計算LLE時,對于線性區(qū)域的判斷往往通過直觀觀察,導(dǎo)致結(jié)果誤差較大.本文將模糊C均值聚類算法用于小數(shù)據(jù)量法線性區(qū)域的選擇,提出了模糊C均值聚類小數(shù)據(jù)量法,提高了計算時間序列LLE的精度,且通過適當(dāng)增加每次迭代的離散時間步長加快了計算LLE的速度.
1 預(yù)備知識
定義1.1Lyapunov指數(shù):

(1)
經(jīng)過n次迭代后,這兩點的距離變?yōu)?/p>
δxn=|fn(x0+δx0)-fn(x0)|.
(2)
定義LE如下[5-6]:
(3)
對于一般的n維動力系統(tǒng),定義LE如下:設(shè)一個n維動力系統(tǒng)xn+1=F(xn)(Rn→Rn),將系統(tǒng)的初始條件取為一個無窮小的n維小球,半徑取為ε(0),由于演化過程中的自然變形,小球?qū)⒆兂蓹E球,見圖1.將橢球上所有主軸按照其長度排列,那么第i個LE根據(jù)第i個主軸的長度εi(t)的增加速率[7-8]定義為
(4)
最大的λi稱為LLE.系統(tǒng)的混沌狀態(tài)可以通過LLE的正負來判斷,當(dāng)LLE大于零時系統(tǒng)處于混沌狀態(tài);當(dāng)LLE小于零時系統(tǒng)穩(wěn)定.

圖1 3維球面隨時間的演化
根據(jù)定義計算LE的方法稱為定義法,由于定義法計算LE時只適用于給定的系統(tǒng),不能求時間序列[7-9]的LLE,因此Rosenstein提出了小數(shù)據(jù)量法.
定義1.2小數(shù)據(jù)量法:
對于時間序列{x1,x2,…,xN}的LLE可以用小數(shù)據(jù)量法,對于時間序列通過計算得[10]:設(shè)嵌入維數(shù)m,時間延遲為τ,平均周期為P,則重構(gòu)相空間為
Xi=[xi,xi+τ,…,xi+(m-1)τ],i=1,2,…,M.
(5)
在重構(gòu)的相空間中尋找每個參考點Xj的最近鄰點Xj′,記
djj′(0)=min‖Xj-Xj′‖.
(6)
其中|j-j′|>P,P為時間序列的平均周期,可以通過基本軌道上每個點的平均發(fā)散速率計算.
對于每個參考點Xj,計算出其與最近鄰點Xj′的第i個離散時間步長后的距離djj′(i)為
djj′(i)=min‖Xj+i-Xj′+i‖,i=1,2,…,min(M-j,M-j′).
(7)
假定參考點Xj與最近鄰點Xj′的指數(shù)發(fā)散率為λ1,那么
djj′(i)=Cjeλ1(i·Δt),Cj=djj′(0),
(8)
上式兩邊取對數(shù)得
lndjj′(i)=lnCj+λ1(i·Δt).
(9)
由(9)式可以看出lndjj′(i)與變量i滿足線性關(guān)系,其曲線斜率為λ1Δt.
因此固定i,對所有的lndjj′(i)求平均再除以Δt,得到平均發(fā)散程度指數(shù)
(10)

2 模糊C均值聚類小數(shù)據(jù)量法
2.1 模糊C均值聚類算法
在眾多模糊聚類算法中,模糊C-均值算法通過優(yōu)化目標(biāo)函數(shù)得到每個樣本點對所有類中心的隸屬度,從而決定樣本點的類屬以達到自動對樣本數(shù)據(jù)進行分類的目的.過程如下:
(11)
(12)
采用迭代的方法,通常情況下取初始隸屬度矩陣為每行為隨機單位向量的矩陣,b=2,最大迭代次數(shù)為100,隸屬度最小變化量為10-6,求解(11)和(12)式,直至滿足收斂條件,得到最優(yōu)解.
2.2 模糊C均值聚類算法選擇線性區(qū)域
在小數(shù)據(jù)量法計算LLE時將模糊C均值聚類算法用于選取線性區(qū)域,具體過程如下:
(1) 運用模糊C均值聚類算法將y(i)數(shù)據(jù)分為不飽和區(qū)域(y(i)達到基本穩(wěn)定之前)和飽和區(qū)域(y(i)在一條水平直線附近做微小波動)兩類,如圖2所示.
(2) 對于不飽和區(qū)域需要選出線性區(qū)域,用二階差分ddy(i)近似替代二階導(dǎo)數(shù),對于不飽和區(qū)域的二階差分(i,ddy(i))將其分成3類,如圖3所示.結(jié)合不飽和區(qū)域平均發(fā)散程度指數(shù)的圖像與不飽和區(qū)域的二階差分的圖像可以看出,當(dāng)i較小時離散程度較大,當(dāng)i較大時線性化程度較低.因此將不飽和區(qū)域的y(i)-i分成3類,如圖4所示,選取第2類作為最終選擇的線性區(qū)域,其斜率就是LLE.
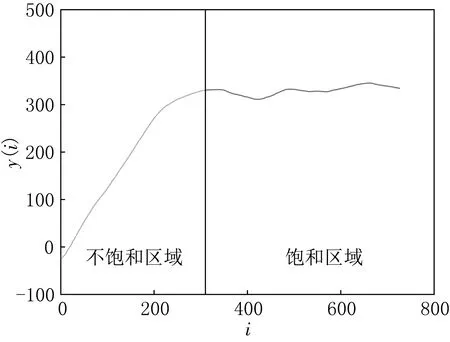
圖2 平均發(fā)散程度指數(shù)

圖3 不飽和區(qū)域平均發(fā)散程度指數(shù)二階差分分類
2.3 模糊C均值聚類小數(shù)據(jù)量法
對于時間序列{y1,y2,…,yN},嵌入維數(shù)my,時間延遲為τy,平均周期為Py,則重構(gòu)相空間為
Yi=[yi,xi+τy,…,yi+(my-1)τy],i=1,2,…,My.
(13)
在重構(gòu)的相空間中尋找每個參考點Yj的最近鄰點Yj′,有
Djj′(0)=min‖Yj-Yj′‖.
(14)
其中|j-j′|>Py,Py為時間序列的平均周期,可以通過基本軌道上每個點的平均發(fā)散速率計算.
對于每個參考點Yj,計算出其與最近鄰點Yj′的第ni(n=1,2,3,…)個離散時間步長后的距離為
Djj′(ni)=‖Yj+ni-Yj′+ni‖,
(15)

假定參考點Yj與最近鄰點Yj′的指數(shù)發(fā)散率為λ,那么
Djj′(ni)=Ajeλ(ni·Δt),Aj=Djj′(0),
(16)
上式兩邊取對數(shù)得
lnDjj′(ni)=lnAj+λ(ni·Δt).
(17)
由(17)式可以看出lnDjj′(ni)與i滿足線性關(guān)系,其曲線斜率為nλΔt.
因此固定i,對所有的lnDjj′(ni)求平均再除以Δt,得到平均發(fā)散程度指數(shù)
(18)

3 數(shù)值實驗
為了驗證模糊C均值聚類小數(shù)據(jù)量法的有效性,以典型的Lorenz系統(tǒng)[11]為例,選兩組不同的系數(shù)進行數(shù)值實驗.Lorenz系統(tǒng)為

(19)
取4個不同的初始點A1=[0.046 2,0.097 1,0.823 5],A2=[0.694 8,0.317 1,0.950 2],A3=[1,4,10],A4=[0.119 0,0.498 4,0.959 7],取a=16,b=4,c=45.92,此時LLE理論值為1.501 5.取積分步長為0.01,演化點3 000個,用小數(shù)據(jù)量法和模糊C均值聚類小數(shù)據(jù)量法(重構(gòu)維數(shù)為5,時間延遲為10,平均周期為40)計算LLE所得結(jié)果與誤差率見表1,小數(shù)據(jù)量法簡稱AL1,模糊C均值小數(shù)據(jù)量法簡稱AL2.
取4個不同的初始點A1=[0.046 2,0.097 1,0.823 5],A2=[0.694 8,0.317 1,0.950 2],A3=[1,4,10],A4=[0.119 0,0.498 4,0.959 7],取a=16,b=4,c=45.92,此時LLE理論值為1.501 5.取積分步長為0.01,演化點5 000個,用小數(shù)據(jù)量法和模糊C均值聚類小數(shù)據(jù)量法(重構(gòu)維數(shù)為5,時間延遲為10,平均周期為40)計算LLE所得結(jié)果與誤差率見表2.
取初始點A1=[0.046 2,0.097 1,0.823 5],取a=16,b=4,c=45.92,此時LLE理論值為1.501 5.取積分步長為0.01,分別演化3 000個點與5 000個點,用模糊C均值聚類小數(shù)據(jù)量法(重構(gòu)維數(shù)為5,時間延遲為10,平均周期為40)每次分別演化i,2i,3i,4i(i的取值見上文)個離散時間步長,LLE計算結(jié)果與運行時間見表3.
取初始點A1=[0.046 2,0.097 1,0.823 5],取a=10,b=8/3,c=28,此時LLE理論值為0.881 0.取積分步長為0.01,分別演化3 000個點與5 000個點,用模糊C均值聚類小數(shù)據(jù)量法(重構(gòu)維數(shù)為5,時間延遲為25,平均周期為40)每次分別演化i,2i,3i,4i(i的取值見上文)個離散時間步長,LLE計算結(jié)果與運行時間見表4.
從表1與表2結(jié)果可以看出,對比于小數(shù)據(jù)量法,文中提出的模糊C均值小數(shù)據(jù)量法計算LLE可以提高計算精度;從表3與表4結(jié)果可以看出,模糊C均值小數(shù)據(jù)量法計算LLE時隨著每次迭代的離散時間步長的增加,計算時間將縮短,但每次迭代的離散時間步長不宜過大.實驗結(jié)果驗證了算法是有效可行的.
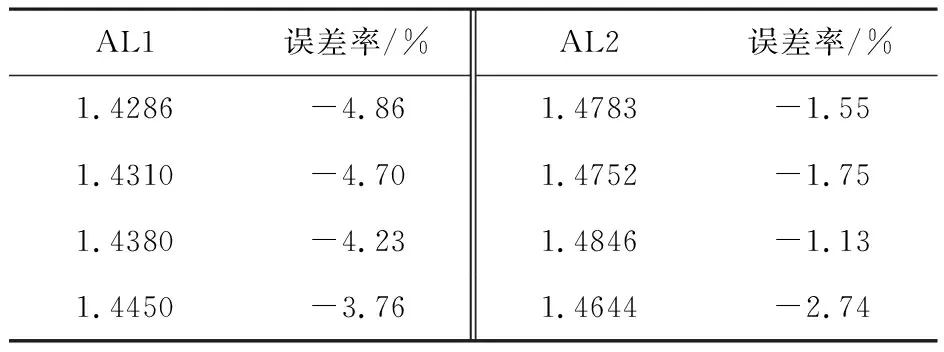
表1 3 000個演化點時小數(shù)據(jù)量法與模糊C均值小數(shù)據(jù)量算法的計算結(jié)果對比
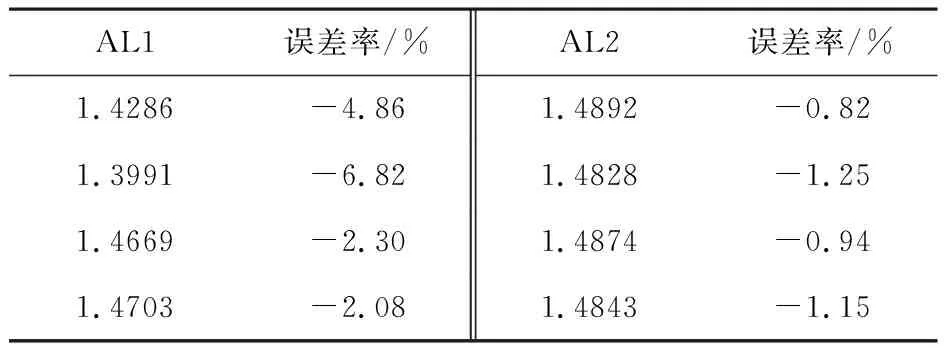
表2 5 000個演化點時小數(shù)據(jù)量法與模糊C均值小數(shù)據(jù)量法的計算結(jié)果對比

表3 模糊C均值小數(shù)據(jù)量法改變步長的計算結(jié)果1(LLE理論值為1.501 5)

表4 模糊C均值小數(shù)據(jù)量法改變步長的計算結(jié)果2(LLE理論值為0.881 0)
4 結(jié)論
將模糊C均值聚類算法用于小數(shù)據(jù)量法線性區(qū)域的選擇而提出的模糊C均值小數(shù)據(jù)量法來計算LLE,通過選出小數(shù)據(jù)量法的線性區(qū)域,可以大大提高小數(shù)據(jù)量法的計算精度.實驗表明,當(dāng)每次迭代的離散時間步長增加時,計算時間將減少.接下來可以研究離散步長的選取對于實驗精度和效率的影響,從而得到更為完善的模糊C均值小數(shù)據(jù)量法.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
山東青年(2016年1期)2016-02-28 14:25:25
電測與儀表(2015年5期)2015-04-09 11:30:52
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
公務(wù)員文萃(2013年5期)2013-03-11 16:08:37
