
汽車制動時的方向穩定性分析
2021-03-29 01:05:20陳嵐林馬宗超陳力
裝備維修技術 2021年20期
陳嵐林 馬宗超 陳力
摘 要:基于車輪制動時的受力分析,得出了汽車制動跑偏與制動側滑產生的原因。結論表明:前軸左右輪制動力之差、后軸左右輪制動力之差、前后車輪抱死順序,均會對汽車制動時的方向穩定性產生很大影響。
關鍵詞:制動跑偏;制動側滑;轉向能力
汽車在制動過程中的方向穩定性,是指汽車在制動過程中保持直線或在預定曲線上行駛的能力。在測試中,往往會規定一定寬度的測試通道(如1.5倍車寬或3.7m),制動時方向穩定性合格的車輛,在試驗過程中,為減少不可控因素的影響,不允許離開試驗通道。汽車制動的方向不穩定現象主要表現為制動跑偏、制動側滑和前輪失去轉向能力,這是車輛失去控制、偏離原行駛方向,從而造成交通事故的重要原因。資料顯示,人類傷亡的交通事故中約有1/3與濕滑路面側滑有關,70%~80%與冰雪路面側滑有關,50%與制動側滑有關。
1制動跑偏的產生原因
制動時,原本預計直線行駛的汽車自動轉向左側或右側,稱為制動偏差。制動跑偏的主要原因是制動力增加不一致,汽車左右輪制動力不相等,尤其是前軸左右輪(轉向輪)。這通常是制造和調整誤差造成的,要看具體情況具體分析。
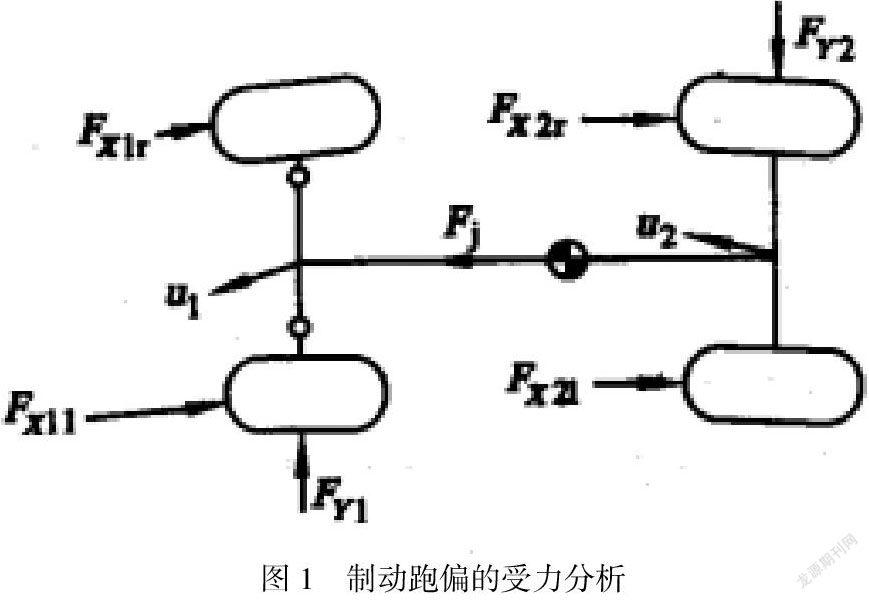
圖1 顯示了轉向軸左右輪制動力不相等導致的偏差的受力分析。為了簡化,假設車速低,跑偏不嚴重,跑偏過程中方向盤不動;制動過程中沒有側滑,汽車做圓周運動時忽略了車身質心周圍的離心力和慣性矩。
設前左輪的制動器制動力大于前右輪,故地面制動力Fx11>Fx1r。此時,前、后軸分別受到的地面側向反作用力為FY1和FY2。顯然,Fx11繞主銷的力矩大于Fx1r繞主銷的力矩。雖然轉向盤不動,但由于轉向系各處的間隙及零部件的彈性變形,偏偏產生一向左轉動的角度而使汽車有輕微的轉彎行駛,即跑偏。同時,由于主銷有后傾,也使FY1對轉向輪產生一同方向的偏轉力矩,這樣也增大了向左轉動的角度。
試驗表明,前軸左右輪制動力差超過5%,后輪軸左右輪制動力差超過10%,會造成制動偏差。制動偏差隨著左右車輪制動力的差異而增加,并在車輪抱死時增加。如果左右車輪主銷內傾角不相等,即使制動力相等,也會跑偏到主銷內傾角較小的一側。為了防止車輛跑偏,在用制動力法測試車輛制動效率時,提出了左右輪制動器動力平衡的要求。此外,懸架導向桿系統和轉向系拉桿的不協調運動,也會導致車輛跑偏。
2制動側滑的產生原因
側滑是指汽車在制動過程中某一個或兩個軸發生橫向運動。側滑與跑偏有關,嚴重的跑偏在特定條件下會導致后軸的側滑,而容易發生側滑的汽車也往往會加重跑偏。
制動時發生側滑,特別是后軸側滑,會導致汽車偏轉,在嚴重的情況下,它可以使汽車掉頭,特別是高速制動時,后軸側滑最危險。制動時,如果后輪在前輪之前抱死,后軸很容易打滑;若前后輪同時抱死,或前輪先抱死,后輪再抱死或未抱死,可防止后軸打滑。但是,前輪寶死后會失去轉向能力。
制動側滑試驗表明,在制動過程中,如果僅前輪抱死,車輛基本沿直線減速,車輛處于穩定狀態,但車輛將失去轉向能力;如果后輪先于前輪抱死(例如, 抱死時間提前0.55秒以上),并且汽車速度超過一定值(如48 km/h)測試速度,只要有一個輕微的側向力,后軸就會發生側滑。側滑的程度與地面平整度、制動距離、制動時間成正比。
2.1側滑的條件
制動過程中車輪側滑的受力情況如圖2 所示。
該輪所受垂直載荷為W,地面垂直反力為F,制動器摩擦力矩為Tμ,所產生的地面制動力為FXb,由于側向風、道路橫坡引起的側向力及轉彎時離心力的作用,車輪上產生側向力Fr,相應的地面側向反力為Y。
FXb及Y的合力為R,顯然,當R=Rzψ(車輪和地面的附著力)時,將產生側滑。在地面制動力FXb的作用下,不產生側滑所承受的側向力為:
上式表明,汽車抵抗側滑的能力與作用在車輪上的地面制動力和法向力有關。當地面制動力與車輪和地面的附著力相等時,即FXb=Fzψ時,即使是微小的側向力都將引起車輪的側向滑移。
2.2側滑時的運動
圖3顯示了汽車側滑時的運動。圖3a為汽車前軸在側滑時的運動示意圖,當汽車直線行駛制動時,如果前輪抱死,后輪滾動,前軸在側向力的作用下會發生側滑。汽車前軸中點處的速度矢量會偏離汽車的縱軸,其夾角為α。后軸中點的速度矢量uB保持不變。當汽車轉彎時,其瞬時轉彎中心是速度uA和uB與兩條垂直線的交點0,相當于繞O做圓周運動,所產生的離心慣性力為Fj,其作用總是起到抵消側向力、減少側滑的作用,一旦側向力消失,Fj具有自動對準汽車的功能。因此,在汽車前進過程中,僅前軸抱死引起的側滑對方向變化影響不大。
圖3b為汽車后輪抱死、前輪滾動時后軸運動示意圖。如果后軸在側向力作用下發生側滑,側滑方向與慣性力Fj的方向基本一致,此時慣性力會使后軸側滑加劇,后軸的進一步側滑又將促進了慣性力的增加。如果這種情況繼續下去,汽車就會出現甩尾,甚至掉頭的情況。發生側滑時,駕駛員往往來不及反應,即使采用放松制動踏板的措施,一般也不可能恢復對汽車的控制。如駕駛員還有反應時間,可在后軸側滑方向適度轉動方向盤,以增大轉彎半徑,減小慣性力。車速越高,離心力越大,側滑就越快。因此,在高等級公路上行駛應盡量減少不必要的制動。
2.3前輪失去轉向能力
前輪失去轉向能力,是指汽車在制動時不再按照原曲線道路行駛,而是沿曲線切線方向行駛,或者在制動時雖然轉動方向盤,但仍在直線方向行駛的現象。
汽車制動時,隨著車輪滑動率的增加,側向附著系數降低,汽車的轉向能力也隨之降低。只有前輪抱死或前輪先抱死時,由于側向附著系數為零,在地面上不再產生側向反作用力,汽車才無法按方向盤給定的方向行駛,失去轉向能力。
3結語
從保證汽車方向穩定性的角度出發,調整車輪制動力時,前軸左右制動力差不應超過5%,后軸左右制動力差不應超過10%。車輛行駛時,不能出現只有后軸車輪抱死或后軸車輪比前軸車輪先抱死的情況,以防止后軸打滑;其次,盡量減少只有前輪抱死或者前后輪都抱死的情況,以保持汽車的轉向能力。最理想的情況是,避免任何車輪抱死,以保證制動時的方向穩定性。
參考文獻:
[1]路文興.西漢高速公路澇峪段交通安全強化方案研究[D].西安:長安大學,2014
[2]凌風.現代汽車轉向操縱穩定系統綜合機能剖析及主動控制原理九[J].汽車維修技師,2011(10):36-38
[15]凌風.現代汽車轉向操縱穩定系統綜合機能剖析及主動控制原理九[J].汽車維修技師,2011(10):39-41
[3]陳瑜.類菱形車行車制動性能研究[D].長沙:湖南大學,2010
[4]張維軍,陳胤.試論汽車穩定性對安全行駛的影響[J].機械研究與應用,2009(1):122-124
[5]趙祥模.汽車ABS防抱制動特性及其不解體檢測技術研究[D].西安:長安大學,2006
