
基于激光點云精確定位的輸電線路無人機自主巡檢系統分析
2021-03-29 01:37:31李林青李宏高舉牟誠德李泓廷
裝備維修技術 2021年20期
李林青 李宏 高舉 牟誠德 李泓廷


摘 要:根據現在社會的不斷發展,電網無人機巡檢的時代也在慢慢到來,新的工作方式也得到了更高得挑戰。為了能夠迅速地實現輸電線路自主無人機巡檢,減少手動飛行的操控,本文分析了基于激光點云精確定位的輸電線路無人機自主巡檢的系統,通過精準三維的激光點云數據來實現航線的自主生成和自主的規劃,從而實現無人機全程無人化巡檢作業飛行。
關鍵詞:激光點云;輸電線路巡檢;無人機巡檢;自主飛行
引言:
近幾年,云南的電網輸電線路規模也在快速地加強,這對輸電線路的巡檢效率與水平運維都提出了很高的要求標準。尤其是隨著國內通航領域政策在逐漸開放與自主無人機技術的迅速發展,綜合地進行分析了自主無人機在巡檢時,路徑的規劃優化與線路的故障檢測,本文對于自主無人機的巡檢監控、應急的巡檢與可靠的運輸,講述了運輸保障的系統設計需求,并且還分析了自主無人機巡檢的應用策略。
1.激光雷達的巡檢
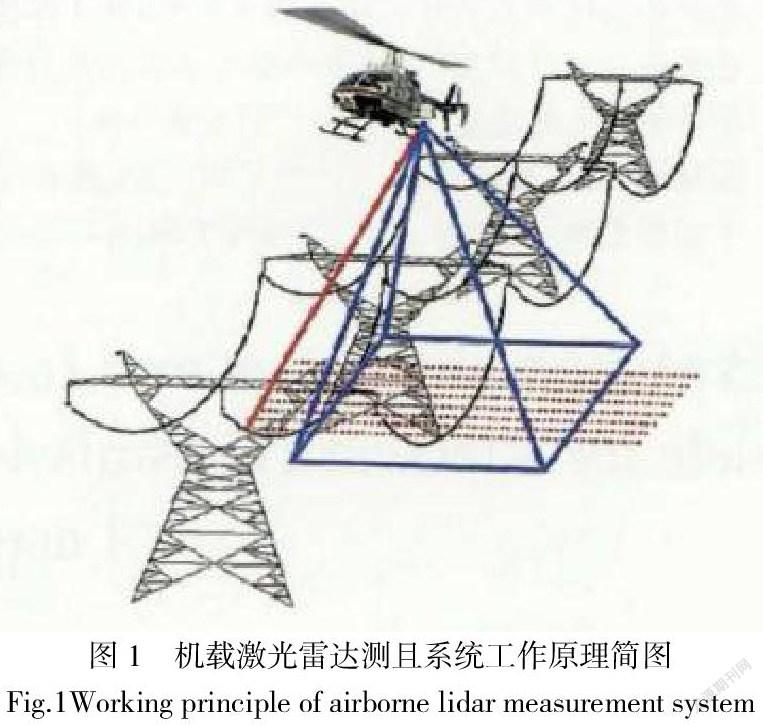
激光雷達的工作原理就是應用激光測距從而來獲取激光的發射器和地面點間的斜距,而且還需要按照同步搭載的CPS與慣性的測量單元來進行數據的激光點云中的定向與定位,這樣就可以恢復激光點云三維的坐標空間,還可以讓系統有穿透性、非接觸性、高密度、自主性及高精度等一些特點。如圖1 所示,在自主無人機的搭載激光雷達的系統是在輸電線路上空中一側的飛行,從而來得到電力線在走廊里面攝像的數據、紅、紫外線的數據、影像的數據和激光的數據等一些環境的變量參數,在經過后期的結算處理分析,可以得到電力線走廊臺賬的數據,還包含著斷面圖、弧垂、跨度以及路刨面圖等這些個數據的特征。而且還需要對路線的走廊來進行矢量化的管理分類,來建立出走廊線路的三維模型。若是要建立一個三維的航跡規劃,那么就需要基于航跡的激光點云的控制目標及跟蹤的算法,還要確保自主無人機航跡的優化性與目標跟蹤的可靠性質。
2.激光點云的智能數據的分析
2.1基本的激光點云的數據管理
目前,按照文中圖2 的激光點云雷達的數據展示。通過使用無人機搭載三維激光設備收集激光點云數據,再進行數據解算處理形成三維激光模型,結合實際物體進行激光點云分類從而實現電力線路中的三維數字化,也會根據《DLT741-2019架空的輸電線路的運行規程》來把線路簡單地進行個分類,如,導線、地線、桿線、通道、河流、樹木及鐵路等一些輸電線路。一般在通道之內,經常會見到的就是地物類型,能夠恢復電力線的沿線地表附著物與地表的形態,還可以滿足每一個電壓等級的輸電線路來進行每一種不同地物的運行安全的距離要求[1]。
圖3是為了測量出激光點云的空間。可以使用點云測量工具或者專用軟件分析處理,進行危險點檢測,和通道的樹障等一些交叉的跨越物,從而得到缺陷隱患的自主分析及自動地測量、自動生成報告。
2.2逐漸降緯的簡化方式的重構電力線
現在的自主無人機在激光雷達下對輸電線路巡檢的過程中,它會受到地貌與地形等一些環境的因素影響,有的時候得到的輸電導線的激光點云數據的密度很低,且激光點云的分布空間的間距也是比較大的,有時也會發生導線斷裂的狀況,這樣就要對導線進入快速的修復,之后在進行恢復本來就有的空間分布。通過系統采取一些簡單的曲線空間的擬合辦法,運用這種逐漸地降緯的方法來進行實現三維曲線空間的擬合。通過幾點內容來分析。一是,面對激光點云數據的影響計算的效率,需要把重復數據逐個過濾;二是,按照導線進行水平面上的分布是呈直線的特點來擬合,這是需要二維平面直線的擬合,從而達到第一次的降緯;三是,依據導線在垂直的水平面上所呈現的是拋物線的特點分布,讓二維曲線進行擬合,這樣就可以實現第二次的降緯了;四是,想要完整的三維空間擬合,就一定要的得到導線整體的三維空間的分布。在進行第一次的降緯時,就是為了X-Y的平面直線相擬合,那么在進行第二次的降緯時,則是為了可以讓X-Z的平面曲線相擬合,在這之后就可以完成三維空間的整體擬合了。在每次的計算當中,維度在降低時它的計算效率也會得到很大的提高,從而實現導線的隨時擬合,隨時恢復。
2.3導線、桿塔的自動分類
在面對輸電線路的導線檔之間走廊上自身的復雜性質,目前的辦法就是針對桿塔或者是導線其中的一種數據來進行分類,這樣就使得數據的分類工作變得非常得復雜繁瑣,但是通過系統的方式獲取基于導線與桿塔空間的拓撲關系,來進行Houghton應用的變換和Kmeans聚類的辦法,這樣就能夠實現桿塔與導線的快速分類。
2.4激光點云糾偏的坐標方法
通常情況下三維激光雷達獲取的點云是相對坐標的點云,若想要應用到高精度自主巡檢中,則必須獲取三維激光點云的絕對坐標,獲取絕對坐標的方法有很多種,本文介紹其中兩種方法,一是通過使用某廠家的云跡服務,對點云進行實時糾偏,二是手動進行坐標糾偏,即在掃描三維激光數據時,通過記錄架設基站的絕對坐標位置來實現手動糾偏功能,首先使用水準基座進行找平,將基站假設在水準基座上獲取儀高,再使用高精度儀器獲取中點上的經緯度坐標,這樣即可獲得該基站的絕對坐標值,記錄好絕對坐標后,將其帶入某特定軟件中進行點云數據的糾偏。
3.激光點云的航線規劃與自主飛行
3.1航線的自主規劃
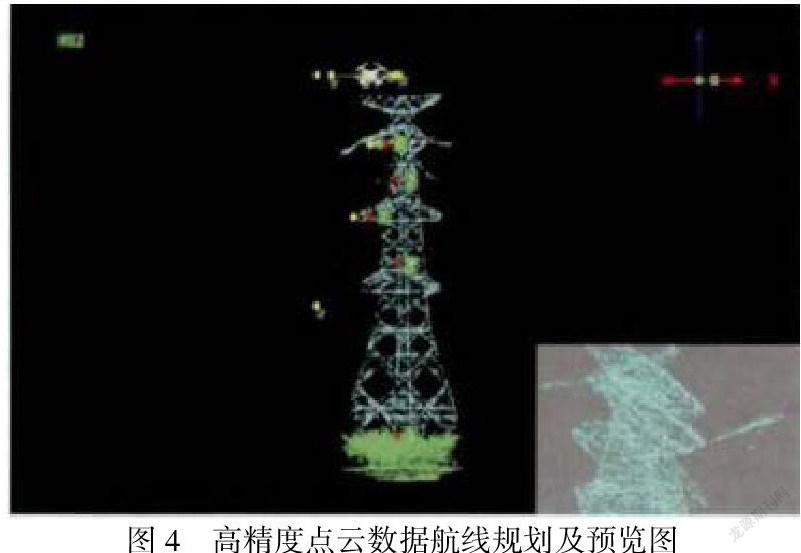
目前文中的圖4是高精度的激光點云數據的航線規劃與預覽圖。它是依據高精度的激光點云桿塔模型的數據,進行航跡規劃,對每一個需要拍照的點進行確認,通過每個拍照點進行連接,從而獲取一條高精度航線,實現桿塔自身本體的精細化巡檢和自動化拍照,它還有連續輸電線路多基桿塔的航線飛行設定,也可以隨時推出自動巡檢航線,這是為了無人機的斷電續航提供了安全可靠的保障;在規劃好航線后,對需要拍照的點進行危險點分析,設定好安全距離,這樣就可以讓無人機避開桿塔,從而降低無人機故障的風險保證安全飛行[2]。
依據不同的地形及塔形來進行參數的航線設置。以某公司無人機經緯M210RTK的系列搭載出Z30的鏡頭為案例,進行航線規劃過程中最初始化的參數設置,從而為得到相應預覽圖,為工作人員提供參考。
3.2無人機自主飛行
通過將航線上傳至無人機非空系統中,使無人機按照已經規劃規劃好的航線,來進行任務飛行。無人機在全自主飛行當中,會自動根據航線進行飛行,在出現緊急狀況之前,可以有一鍵返航的功能,或切換至手動操作,這樣就可以保證無人機在全程無人化的時候,能夠順利地完成自主飛行巡檢的飛行作業[3]。無人機自主巡檢充分地展示了無人機在輸電線路精細化巡檢的全面覆蓋,在拍攝目標要求的方面,就是“可見即可得”的成果,也為了今后的輸電線路的自主無人機的巡檢能夠提供出探索的新發展方向。基于激光點云高精確定位的輸電線路無人機自主巡檢的系統在未來的發展過程中,將有效提高作業人員的工作效率,降低作業人員對無人機使用的操作要求,保證作業人員及時獲取電網風險信息,從而使電網的安全風險得到極大的降低。
結語:
總而言之,文中提出了基于激光點云準確定位的無人機自主巡檢的系統分析方案,這種分析一般基于高精度的三維激光點云的數據來進行航線的自主生成與自主的規劃,這樣就可以實現無人機全自主作業飛行,在無人機進行自主的巡檢飛行的時候,通過自動壁障的功能及空間碰撞檢測,可以降低無人機自主巡檢時發生碰撞的概率,通過手動切換無人機操作模式,使無人機斷電續航提供安全保障。
參考文獻
[1]湯明文,戴禮豪,林朝輝,等.無人機在電力線路巡視中數據的分析[J].中國電力,2020,46(3):35-38.
[2]黃俊璞,林韓,宋福根,等.輸電線路上方無人機巡檢避障策略[J].電氣應用,2019,34(23):32-34.
[3]康樂.無人機三維航跡規劃的方法研究[J].計算機工程與應用,2019 , 45 ( 33):236-239.
