基于自適應(yīng)引力算法的橋梁監(jiān)測(cè)傳感器優(yōu)化布置
2021-03-31 07:29:14柏智會(huì)宋宇博
振動(dòng)與沖擊 2021年6期
高 博,柏智會(huì),宋宇博
(蘭州交通大學(xué) 機(jī)電工程學(xué)院,蘭州 730070)
橋梁的健康監(jiān)測(cè)是測(cè)量橋梁在損傷條件下的動(dòng)力特性和結(jié)構(gòu)參數(shù)改變量,對(duì)比其在無(wú)損狀態(tài)下的信息,并制定出最佳的維護(hù)方案[1]。傳感器優(yōu)化布置方案對(duì)橋梁健康監(jiān)測(cè)的測(cè)試精度和參數(shù)分析有著直接影響。考慮到經(jīng)濟(jì)性和結(jié)構(gòu)特征,要求橋梁上安裝的傳感器數(shù)量有限,因此,如何利用有限的傳感器測(cè)點(diǎn)代表整體結(jié)構(gòu)的運(yùn)行狀況和完整信息顯得十分重要。傳感器優(yōu)化布置原理是從N個(gè)待測(cè)點(diǎn)中挑選出M個(gè)布設(shè)點(diǎn),使目標(biāo)函數(shù)達(dá)到最優(yōu)的過程。其實(shí)質(zhì)是組合優(yōu)化問題,由于最終布置結(jié)果的復(fù)雜性和多樣性,成為當(dāng)今學(xué)者的熱門研究課題。
目前已有許多成熟的傳感器布置方法,其中傳感器優(yōu)化布置方案主要分為兩類,一類是傳統(tǒng)優(yōu)化方法:Kammer等[2]提出的有效獨(dú)立法是以模態(tài)矩陣為理論基礎(chǔ),將測(cè)點(diǎn)獨(dú)立性的貢獻(xiàn)值作為判定準(zhǔn)則,依次刪除貢獻(xiàn)最小的測(cè)點(diǎn),最終留下線性無(wú)關(guān)性最大的點(diǎn)作為傳感器布置方案;Carne等[3]提出的模態(tài)置信準(zhǔn)則(modal assurance criterion ,MAC),將MAC矩陣的非對(duì)角元素最小化作為目標(biāo)函數(shù),發(fā)現(xiàn)MAC可以較好的反映梁模態(tài)向量的識(shí)別性;Guyuan縮減法[4]是利用剛度質(zhì)量比小的位置更能反映結(jié)構(gòu)的模態(tài)特性,將傳感器布置在縮減后的位置。上述方法得到的結(jié)果往往是局部次優(yōu)點(diǎn),存在優(yōu)化效率較低,尋優(yōu)性能差的缺點(diǎn),并不能達(dá)到理論與實(shí)際值誤差最小的要求。第二類群智能優(yōu)化算法,憑借其優(yōu)秀的搜索和開發(fā)能力,在傳感器布置中取得了快速發(fā)展:Dinh-Cong等[5]將Jaya算法應(yīng)用到傳感器優(yōu)化布置和復(fù)合結(jié)構(gòu)的損傷識(shí)別,發(fā)現(xiàn)可以成功找到損傷部位;Bruggi等[6]在傳感器布置時(shí)采用拓?fù)浞椒ㄟM(jìn)行優(yōu)化,并在板結(jié)構(gòu)的損失識(shí)別驗(yàn)證了算法的可行性;Wang等[7]提出了基于頻率和空間域分解的方法,對(duì)四跨橋結(jié)構(gòu)進(jìn)行模態(tài)分析和損傷識(shí)別;Jin[8]提出了使用模態(tài)置信準(zhǔn)則結(jié)合改進(jìn)的和聲搜索算法,應(yīng)用在起重機(jī)傳感器布置并驗(yàn)證了其優(yōu)越性;Yi等[9]將自適應(yīng)猴群算法采用雙重編碼的方式應(yīng)用在高層建筑,發(fā)現(xiàn)更穩(wěn)定的最優(yōu)解;楊振偉等[10]引入等級(jí)劃分和免疫機(jī)制,將改進(jìn)的螢火蟲算法應(yīng)用在橋梁傳感器布置,尋優(yōu)效率取得顯著提高。黃民水等[11]提出了基于二重編碼的遺傳算法應(yīng)用于橋梁結(jié)構(gòu)的健康監(jiān)測(cè);趙建華等[12]把慣性權(quán)重遞減的粒子群算法結(jié)合模態(tài)置信準(zhǔn)則,發(fā)現(xiàn)在二維桁架結(jié)構(gòu)中能找出傳感器的優(yōu)化位置。以上基于群智能算法的傳感器布置方法依然存在一定的局限性,如對(duì)于同一研究對(duì)象,不同的研究方法得到的傳感器布置方案往往不同,因此算法的可靠性驗(yàn)證仍需進(jìn)一步改善。
引力搜索算法(gravity search algorithm,GSA)[13]憑借其容易實(shí)現(xiàn),可操作性好,優(yōu)化效果明顯的優(yōu)點(diǎn),在生產(chǎn)實(shí)踐中得到廣泛應(yīng)用[14-17]。GSA算法也存在搜索能力較弱的缺點(diǎn),本文對(duì)GSA算法進(jìn)行改進(jìn),通過對(duì)引力常量G中衰減因子α的自適應(yīng)調(diào)整,以改變粒子不同時(shí)期的步長(zhǎng),來(lái)改善算法性能,提高算法搜索能力。將改進(jìn)后的自適應(yīng)引力算法(adaptive gravity search algorithm,AGSA)通過雙重編碼的方式,結(jié)合MAC準(zhǔn)則,提出了基于AGSA算法的傳感器優(yōu)化布置方案。以馬水河大橋?yàn)閷?shí)例,驗(yàn)證AGSA算法的有效性,發(fā)現(xiàn)改進(jìn)后的AGSA算法在傳感器優(yōu)化布置優(yōu)于遺傳算法(genetic algorithm,GA)得到的結(jié)果。
1 傳感器優(yōu)化準(zhǔn)則
現(xiàn)有的傳感器優(yōu)化準(zhǔn)則如模態(tài)動(dòng)能法由于高度依賴有限元網(wǎng)格的劃分精度,會(huì)影響數(shù)據(jù)的可靠性;模態(tài)縮減準(zhǔn)則存在容易丟失待測(cè)模態(tài)的缺點(diǎn),增加識(shí)別難度。在實(shí)際生產(chǎn)中,由于受到外在因素:測(cè)量?jī)x器的精度誤差、測(cè)試場(chǎng)所的噪聲干擾等,會(huì)導(dǎo)致得到的模態(tài)向量夾角過小,甚至為0的情況,而導(dǎo)致模態(tài)信息丟失的情況。故傳感器優(yōu)化布置的測(cè)點(diǎn)應(yīng)選取空間中模態(tài)夾角較大,易識(shí)別的點(diǎn)。MAC可以選擇較大的空間交角,盡可能保留原模型的特性。保證了模態(tài)的正交性和模態(tài)信息的完整性。故可以將MAC作為傳感器優(yōu)化布置的適應(yīng)度函數(shù),用來(lái)評(píng)價(jià)各階測(cè)試振型的獨(dú)立性。MAC的表達(dá)式為
(1)
式中,φi和φj分別為第i階和第j階模態(tài)向量。
研究表明,MACij(i≠j)的值介于0~1,反映對(duì)應(yīng)模態(tài)向量的空間夾角。其中MACij(i≠j)的值越接近于0,說明對(duì)應(yīng)的空間夾角越大,i階和j階模態(tài)向量越接近正交;MACij(i≠j)的值越接近于1,說明對(duì)應(yīng)的空間夾角越小,i階和j階模態(tài)向量越接近平行。一般地,當(dāng)MACij(i≠j)值小于0.25,即可認(rèn)為兩模態(tài)向量容易識(shí)別。MAC矩陣的非對(duì)角元素值越小,表明計(jì)算的模態(tài)向量獨(dú)立性越好,其模態(tài)振型越容易識(shí)別。因此可以將MAC矩陣的最大非對(duì)角元素最小化作為橋梁傳感器布置的適應(yīng)度函數(shù),表達(dá)式為
fitness=minf(x)
(2)

2 基于自適應(yīng)的引力搜索算法
引力搜索算法是利用粒子之間受到萬(wàn)有引力的吸引作用,種群中質(zhì)量最大的粒子占據(jù)最優(yōu)位置,其他粒子在萬(wàn)有引力的作用下向質(zhì)量最大的粒子移動(dòng),得到所求問題全局最優(yōu)解的過程[19]。假設(shè)算法中有M個(gè)粒子,以其中某一粒子i為例,粒子i受到其他粒子的萬(wàn)有引力,在合力作用下產(chǎn)生加速度a和速度v,使粒子i下一時(shí)刻向全局最優(yōu)解靠近的過程。引力常量G自始至終貫穿于算法的整個(gè)搜索過程,其取值的變化過程會(huì)直接影響算法的搜索效率和尋優(yōu)精度,GSA算法中的衰減因子α的取值時(shí)一個(gè)常數(shù),這會(huì)導(dǎo)致粒子在搜索過程以固定的步長(zhǎng)移動(dòng)。為了增強(qiáng)算法的優(yōu)化能力,本文提出的AGSA算法對(duì)α進(jìn)行自適應(yīng)調(diào)整,搜索初期粒子距離最優(yōu)解較遠(yuǎn),粒子以較大步長(zhǎng)進(jìn)行全局搜索;搜索后期粒子靠近最優(yōu)解的鄰域,粒子采取小步長(zhǎng)搜索,有利于算法局部搜索,有效找到全局最優(yōu)解。
2.1 引力搜索算法

(3)
式中:Mi(t)和Mj(t)分別為粒子i,j的慣性質(zhì)量;G(t)為t時(shí)刻的萬(wàn)有引力系數(shù);R為粒子i與粒子j之間的距離;ε是為了保證分母不為0的非常小的數(shù)。
G(t)的計(jì)算公式為
(4)
式中,α為常數(shù);Imax為最大迭代次數(shù)。
(5)
式中,best為對(duì)粒子i有引力作用的粒子的集合。

(6)
式中,Mass(i)為粒子i的慣性質(zhì)量,其計(jì)算公式為
(7)
(8)
式中,fitnessb(t)和fitnessw(t)分別為最好的適應(yīng)度值和最差的適應(yīng)度值。
下一時(shí)刻粒子i的速度和位置公式為
(9)
式中,rand1,rand2為[0,1]的隨機(jī)數(shù)。
2.2 改進(jìn)的自適應(yīng)引力搜索算法
引力常量G(t)對(duì)算法的收斂速度和尋優(yōu)精度具有重要影響。式(4)中的α具有調(diào)節(jié)算法收斂速度的作用[20]。針對(duì)GSA算法的尋優(yōu)效率和搜索精度問題,本文對(duì)GSA算法進(jìn)行了改進(jìn),提出了AGSA算法。考慮到GSA算法中α的取值是一個(gè)常數(shù),這就會(huì)導(dǎo)致粒子距離最優(yōu)解較遠(yuǎn)時(shí),步長(zhǎng)太小,移動(dòng)過慢,花費(fèi)時(shí)間太長(zhǎng);粒子距離最優(yōu)解較近時(shí),步長(zhǎng)太大,可能出現(xiàn)偏離最優(yōu)解,陷入局部最優(yōu)解的情況。因此,改進(jìn)后的AGSA算法在搜索前期選取較小的衰減因子α,粒子以較大的步長(zhǎng)進(jìn)行全局搜索,有利于減少算法的搜索時(shí)間,提高整體尋優(yōu)效率;算法的后期選取較大的衰減因子α,粒子對(duì)應(yīng)較小的步長(zhǎng)完成局部搜索,避免算法落入局部極值點(diǎn)。自衰減因子α的自適應(yīng)原理是迭代初期對(duì)應(yīng)的衰減因子α取較小值,對(duì)應(yīng)的G取值較大,有利于粒子進(jìn)行全局搜索;迭代后期衰減因子α不斷增加接近β,對(duì)應(yīng)的G取值較小,有利于粒子進(jìn)行局部搜索。自適應(yīng)衰減因子α表達(dá)式為
(10)
式中:t為當(dāng)前迭代次數(shù);β為初始參數(shù),根據(jù)經(jīng)驗(yàn),當(dāng)β=40時(shí),算法的尋優(yōu)效果最佳,β的取值具有通用性,不受橋梁規(guī)模和所選橋型的影響。
AGSA算法的原理圖如圖1所示

圖1 AGSA算法原理圖Fig.1 Schematic diagram of AGSA
圖1中,粒子M1在M2,M3,M4的萬(wàn)有引力作用下產(chǎn)生了合力F1和加速度a1,通過衰減因子α的自適應(yīng)機(jī)制,粒子M1以不同的步長(zhǎng)向全局最優(yōu)解靠近。
3 基于自適應(yīng)引力的傳感器優(yōu)化布置
3.1 種群初始化及編碼
GSA算法當(dāng)前主要應(yīng)用在連續(xù)優(yōu)化問題的求解,傳感器優(yōu)化布置是類似于0-1規(guī)劃的離散型問題,因此需要將引力搜索算法改進(jìn)為適合整數(shù)規(guī)劃的優(yōu)化算法。本文采用一種雙重編碼的方式,雙重編碼的方法如表1所示。

表1 雙重編碼方式Tab.1 Dual-structure coding method
利用附加碼xi和變量碼si組成的有序?qū)?xi,si)表示種群中個(gè)體i對(duì)應(yīng)的傳感器布置結(jié)果[21],(xi為i的位置向量;si為二進(jìn)制向量0或1,其中,0為不布置傳感器,1為布置傳感器),這種雙重編碼的方式使得AGSA算法可以解決傳感器優(yōu)化布置問題。例如,已知有8個(gè)待選點(diǎn),它們的附加碼為x=(5,3,6,1,4,7,2,8),其雙重結(jié)構(gòu)編碼結(jié)果如表2所示,由表2可以知道變量碼對(duì)應(yīng)的布置方案為s=(3,4,5,8)。

表2 雙重編碼結(jié)果Tab.2 The result of dual-structure coding method
3.2 基于AGSA算法的傳感器優(yōu)化布置過程
步驟1選擇和導(dǎo)入模態(tài)矩陣。模態(tài)矩陣階數(shù)的選擇對(duì)傳感器布置結(jié)果有重要影響,一方面,適合的模態(tài)矩陣可以代表結(jié)構(gòu)的整體性能,保證布置方案的準(zhǔn)確性;另一方面,不同的模態(tài)階數(shù),得到的布置方案有差異性。首先,建立馬水河特大橋的有限元模型,利用模態(tài)分析的方法得到模型所有節(jié)點(diǎn)的模態(tài)振型矩陣,將得到的模態(tài)振型矩陣作為輸入值,所有節(jié)點(diǎn)對(duì)應(yīng)的自由度作為傳感器布置的待選點(diǎn),其次,假設(shè)待選點(diǎn)的數(shù)量為n,傳感器布設(shè)點(diǎn)數(shù)量設(shè)置為m,對(duì)這n個(gè)候選位置依次從1-n進(jìn)行整數(shù)編號(hào)。
步驟2設(shè)種群數(shù)量為N,粒子i對(duì)應(yīng)的解可以表示為xs(i)=(xi,si)={(xi1,si1),(xi2,si2),…,(xin,sin)},xi的各個(gè)分量是區(qū)間[down,up]產(chǎn)生的隨機(jī)整數(shù),si的分量是由轉(zhuǎn)換函數(shù)得到的二進(jìn)制向量。

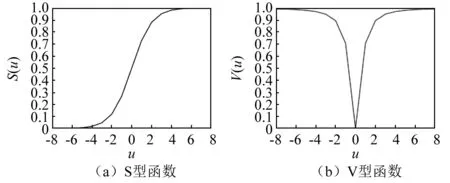
圖2 轉(zhuǎn)換函數(shù)Fig.2 Conversion function
劉勇等[22]發(fā)現(xiàn)并驗(yàn)證了V型轉(zhuǎn)換函數(shù)的優(yōu)化效果更好,故本文選取V型函數(shù)作為轉(zhuǎn)換函數(shù)。si的分量按照下式轉(zhuǎn)化為二進(jìn)制向量
(11)
式(11)中,不同的位置分量xij計(jì)算得到的二進(jìn)制值不同,因此需要設(shè)置一個(gè)閥值δ來(lái)滿足
(12)
式中,j∈{1,2,…,f},本文中δ=0.5,將xi的各位置分量代入式(11)中,若函數(shù)值大于0.5,附加碼值為1,表示在該候選點(diǎn)布置傳感器;若函數(shù)值小于0.5,附加碼值為0,表示在該候選點(diǎn)不布置傳感器。通過計(jì)算可以得到xij的取值在[-8,8]時(shí)取值時(shí),si的分量取值0≤V(xij)≤0.992 3,可以近似代替[0,1]。故down=-8,up=8。
步驟3按照步驟1和步驟2,隨機(jī)產(chǎn)生種群數(shù)量為N的粒子位置,其中,每個(gè)粒子的位置都表示一種傳感器布置方案。
步驟4把種群中的N個(gè)粒子依次代入適應(yīng)度函數(shù)fitness(xsi)。在計(jì)算過程中,位置向量通過轉(zhuǎn)化函數(shù)V(xij)轉(zhuǎn)化為二進(jìn)制向量sij,將sij代表的傳感器位置對(duì)應(yīng)的模態(tài)矩陣計(jì)算適應(yīng)度函數(shù),最好的適應(yīng)度值標(biāo)記為fitnessb(xsi),最差的適應(yīng)度值標(biāo)記為fitnessw(xsi)。最好適應(yīng)度值對(duì)應(yīng)的布置方案記為pi(xsi),pi(xsi)代表種群中粒子的個(gè)體最優(yōu)解,是每個(gè)粒子迭代中的最優(yōu)解。pg(xsi)表示全局最優(yōu)解,是種群中所有粒子中的最優(yōu)解。
步驟5利用式(7)和式(8),計(jì)算每個(gè)粒子的慣性質(zhì)量;按照式(9)對(duì)衰減因子α進(jìn)行自適應(yīng)改變,更新引力常量G(t)。
步驟6以粒子i為例,其對(duì)應(yīng)的位置分量xi={xi1,xi2,…,xim},其中m為需要布設(shè)的傳感器數(shù)目,計(jì)算粒子i與其他粒子的歐式距離,利用式(3)和式(5),得到粒子i在其他粒子作用下的合力,利用式(6)計(jì)算粒子i受到的加速度。同理計(jì)算出種群中其他粒子受到的萬(wàn)有引力和加速度。
步驟7為加快粒子收斂速度,在粒子速度公式中引入變異算子η,增加全局最優(yōu)解對(duì)粒子的引導(dǎo)作用,變異算子的表達(dá)式如式(13)所示,在更新位置的過程中,計(jì)算得到的加速度和速度分量會(huì)出現(xiàn)非整數(shù)的情況。因此,本文中位置更新如式(14)所示。
(13)
(14)
式中,round為取整函數(shù),保證更新后的粒子位置分量是整數(shù)形式。
步驟8將更新后的粒子對(duì)應(yīng)的模態(tài)位移代入式(2),若更新后的fitness(xsi)值小于更新前的,則粒子位置發(fā)生改變,否則,粒子位置保持不變。更新后的最優(yōu)適應(yīng)度值對(duì)應(yīng)的布置方案記為pb(xsi),若更新后的最優(yōu)適應(yīng)度值fitness(pb)小于更新前的全局最優(yōu)值pg(xsi)對(duì)應(yīng)的適應(yīng)度值fitness(pg(xsi)),則用當(dāng)前粒子代替全局最優(yōu)解,反之,全局最優(yōu)解保持不變。
步驟9判斷算法是否達(dá)到預(yù)設(shè)的精度要求或最大迭代次數(shù),若滿足,停止迭代,輸出全局最優(yōu)解,即為需要的傳感器布置方案;若不滿足,返回到步驟5。
注1粒子的位置分量是從[-8,8]中隨機(jī)產(chǎn)生的整數(shù),在步驟7中,粒子在位置更新中,可能會(huì)出現(xiàn)超出取值范圍的情況。因此,本文規(guī)定,當(dāng)位置分量大于8時(shí),取8;當(dāng)位置分量小于-8時(shí),取-8。
基于AGSA的流程圖如圖3所示。
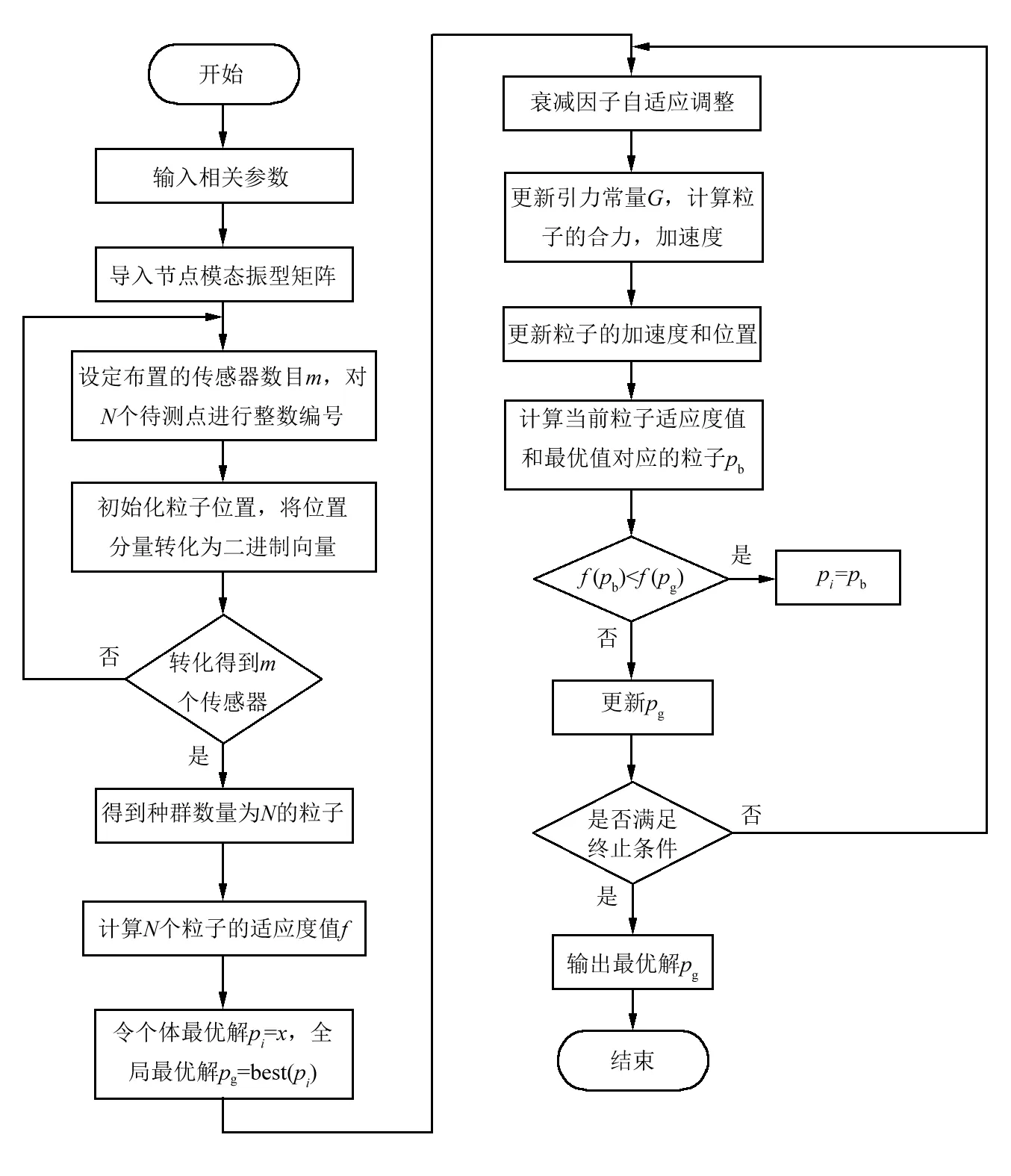
圖3 基于AGSA的流程圖Fig.3 Flow chart based on AGSA
4 模型驗(yàn)證
4.1 計(jì)算模型
為了驗(yàn)證本文提出的算法在傳感器優(yōu)化布置的有效性,本文以馬水河大橋?yàn)槔鐖D4所示,橋梁全長(zhǎng)955.80 m,橋面中心設(shè)計(jì)標(biāo)高654.355 m,主橋上部采用110 m+3 m×200 m+110 m,全橋?yàn)閱蜗鋯问遥瑯蛎鎸?2.5 m,梁底寬6.5 m,梁高3.50~12.00 m;主橋下部共有4座橋墩,承臺(tái)厚度為4.0 m。考慮到馬水河特大橋在施工時(shí)會(huì)受到溫度,預(yù)應(yīng)力拉伸等因素的影響,將橋梁模型簡(jiǎn)化為平面剛架,各施工段按照梁?jiǎn)卧?jì)算,導(dǎo)入到ANSYS進(jìn)行模態(tài)分析。模型共有442個(gè)節(jié)點(diǎn),436個(gè)單元,每個(gè)節(jié)點(diǎn)包含3個(gè)自由度,分別對(duì)應(yīng)x,y,z方向的模態(tài)信息。并導(dǎo)出結(jié)構(gòu)的前10階模態(tài)振型。由于x和z方向模態(tài)位移均接近于0,因此本文只考慮y方向的模態(tài)位移。橋梁結(jié)構(gòu)的前10階固有頻率及振型描述如表3所示。

圖4 橋梁計(jì)算模型Fig.4 Bridge calculation model
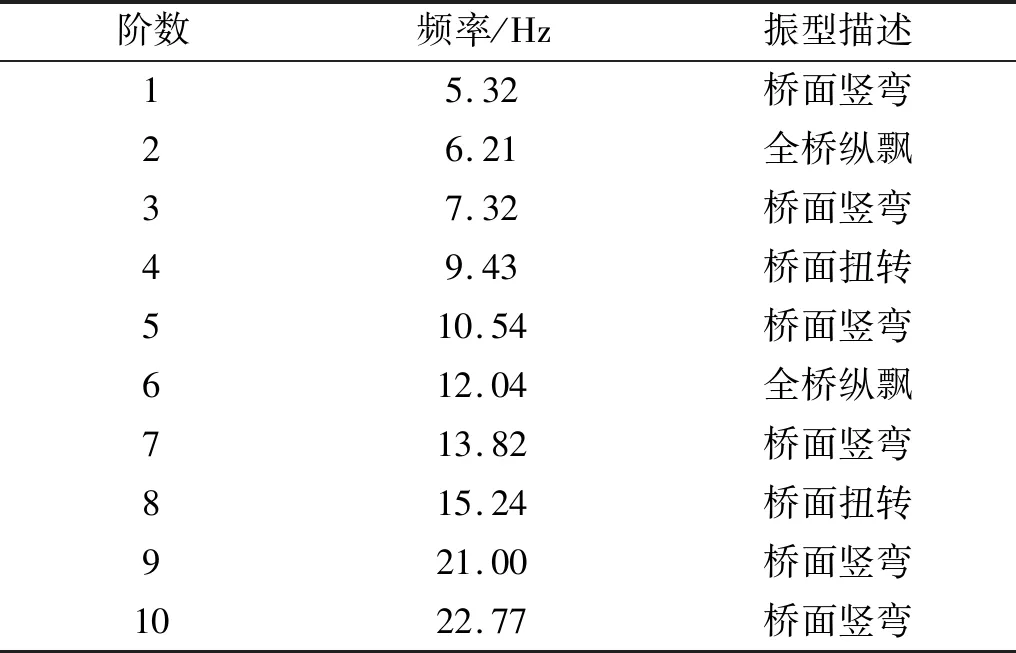
表3 橋梁固有頻率及振型描述Tab.3 Description of natural frequency and vibration mode of bridge
4.2 自適應(yīng)引力算法布置方案
根據(jù)本文提出的自適應(yīng)引力搜索算法進(jìn)行傳感器布置。設(shè)定種群數(shù)量為N=100,迭代次數(shù)為Imax=20,β=40,G0=100,算法重復(fù)運(yùn)行10次,分別計(jì)算布設(shè)點(diǎn)m為8,12,16時(shí),目標(biāo)函數(shù)的最優(yōu)值,最差值,以及平均值。其最優(yōu)布置方案和迭代曲線分別如表4和圖5所示。

表4 傳感器布置方案Tab.4 Sensor placement
由圖5可知,不同的傳感器數(shù)量對(duì)應(yīng)的適應(yīng)度函數(shù)值不同,當(dāng)布置的傳感器數(shù)量m分別為8,12,16時(shí),目標(biāo)函數(shù)的平均值分別為0.132 4,0.046 6,0.018 8。結(jié)果表明隨著m的增加,目標(biāo)函數(shù)的平均值越小,搜索得到的模態(tài)向量更容易識(shí)別;目標(biāo)函數(shù)的最優(yōu)值依次可以達(dá)到0.109 8,0.033 9,0.010 2。說明在一定的取值范圍內(nèi),隨著傳感器數(shù)量的增加可以得到的布置方案更優(yōu)。

圖5 自適應(yīng)引力算法迭代曲線Fig.5 Iterative curves of adaptive gravitation algorithms
一般來(lái)說,傳感器布置的數(shù)量越多,可以得到結(jié)構(gòu)的布置信息越多,越能反映結(jié)構(gòu)的健康狀況。但在實(shí)際應(yīng)用中,由于傳感器成本較高,不可能布置太多的傳感器,傳感器數(shù)量的選擇顯得至關(guān)重要。故本文以傳感器數(shù)量為自變量,以式(2)為目標(biāo)函數(shù),每組變量計(jì)算10次,10次運(yùn)行結(jié)果的平均值為應(yīng)變量,變化曲線如圖6所示。可以看出傳感器數(shù)量在0~8時(shí),目標(biāo)函數(shù)的下降曲線較快,當(dāng)傳感器數(shù)量在15~20時(shí),目標(biāo)函數(shù)值趨于穩(wěn)定。因此,本文選取m=16作為最終布置的傳感器數(shù)量。

圖6 傳感器數(shù)量與目標(biāo)函數(shù)曲線Fig.6 The curve of sensors number and objective function curve
同時(shí),為了驗(yàn)證所選模態(tài)階數(shù)對(duì)傳感器優(yōu)化結(jié)果的影響,本文探討了傳感器數(shù)量設(shè)定m=16,模態(tài)階數(shù)分別為6,7,8,9,10時(shí),通過AGSA算法最終得到的傳感器優(yōu)化布置結(jié)果和對(duì)應(yīng)精度如表5所示。
由表5可以看出,隨著模態(tài)階數(shù)的增加,MAC矩陣非對(duì)角最大值出現(xiàn)增大的趨勢(shì)。但從表中可以看出不論模態(tài)階數(shù)選取6階還是10階,最終得到的目標(biāo)函數(shù)值遠(yuǎn)小于0.25,也證明了AGSA算法的有效性。

表5 模態(tài)階數(shù)對(duì)優(yōu)化結(jié)果的影響Tab.5 Effect of modal order on optimization results
4.3 優(yōu)化布置結(jié)果分析
為了進(jìn)一步突出AGSA算法的優(yōu)越性,比較AGSA算法和GA算法在布置16個(gè)傳感器時(shí)的結(jié)果。圖7給出了兩種算法的MAC矩陣柱形圖。一種是GA算法[23]得到的傳感器布置方案;另一種是AGSA算法得到的傳感器布置方案。GA算法得到的MAC矩陣非對(duì)角元最大值為0.169 0,雖然小于0.25,但是個(gè)別位置還存在不宜分辨的情況;相比GA算法,AGSA算法的非對(duì)角元最大值為0.010 2,效率提升93.96%,也說明本文提出的基于AGSA算法是有效性和可行性。考慮到圖7中MAC矩陣的非對(duì)角元素值太小,圖8給出了兩種算法布置方案對(duì)應(yīng)的MAC矩陣每個(gè)模態(tài)列向量非對(duì)角元最大值。由圖8可以清楚的看出AGSA算法的MAC矩陣的最大非對(duì)角元明顯小于GA算法得到的結(jié)果。這也驗(yàn)證了AGSA算法對(duì)應(yīng)的模態(tài)向量區(qū)分度更高,布置方案更優(yōu)。表6給出了兩種算法的傳感器布置方案。
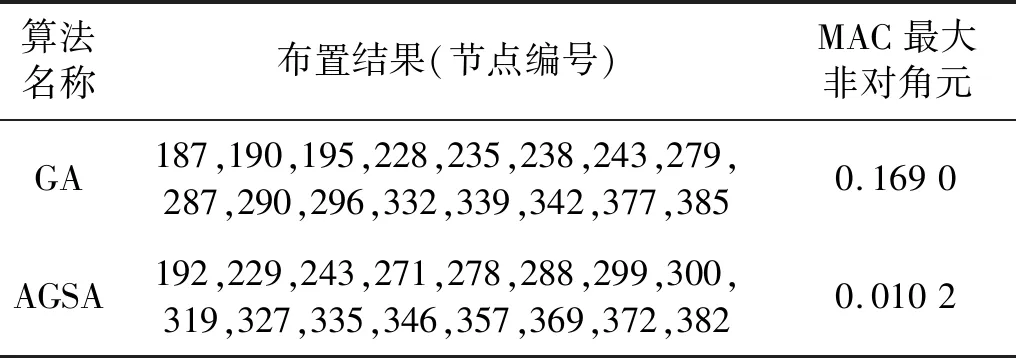
表6 兩種算法的布置方案Tab.6 Sensor placement of two algorithms
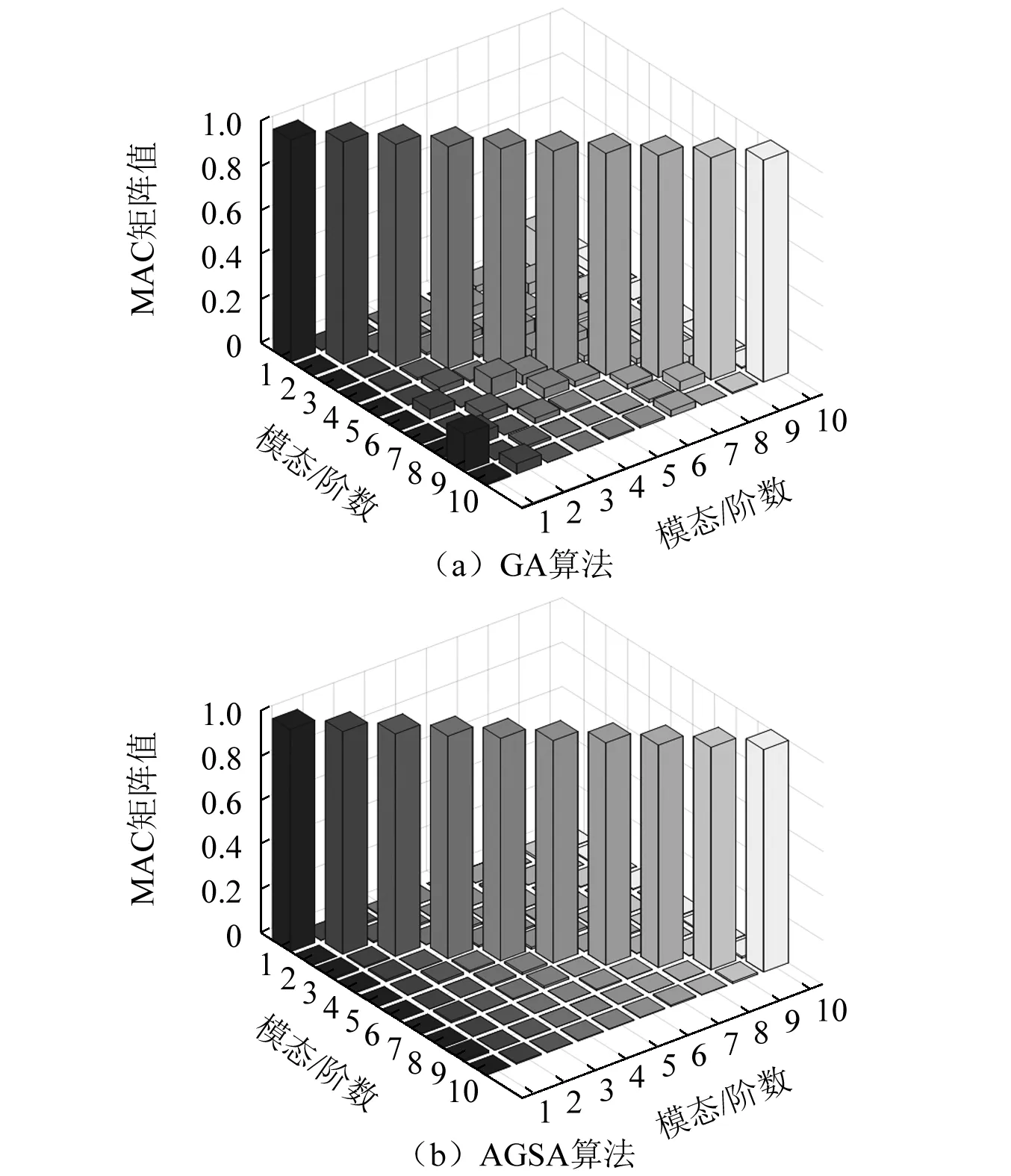
圖7 兩種算法的MAC矩陣Fig.7 MAC matrix under two algorithms
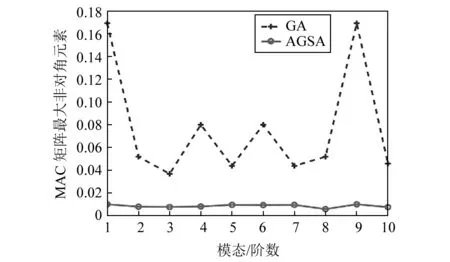
圖8 MAC矩陣每個(gè)列向量最大非對(duì)角元Fig.8 Maximum MAC off-diagonal value in each of the modes
5 結(jié) 論
本文針對(duì)GSA算法只能解決連續(xù)性函數(shù)的優(yōu)化問題,提出了可以解決離散型問題的AGSA算法,并將其應(yīng)用到馬水河大橋的傳感器優(yōu)化布置中,將其布置結(jié)果與遺傳算法得到的結(jié)果比較,得到以下結(jié)論:
(1)針對(duì)GSA算法搜索效率和尋優(yōu)精度不高,本文提出的AGSA算法對(duì)引力常量G中的α進(jìn)行了改進(jìn),確保粒子在不同的搜索時(shí)期,進(jìn)行全局搜索和局部精細(xì)搜索,提高了算法的全局搜索能力。
(2)為了AGSA算法可以解決離散型的傳感器優(yōu)化布置問題,本文采用雙重編碼的方式,將AGSA算法應(yīng)用到傳感器布置中,克服了二進(jìn)制編碼導(dǎo)致的迭代過程中,傳感器數(shù)量發(fā)生改變的缺點(diǎn)。試驗(yàn)結(jié)果表明,該方法可以有效解決傳感器優(yōu)化布置問題。
(3)AGSA算法通過多次試驗(yàn),發(fā)現(xiàn)傳感器數(shù)量選擇對(duì)目標(biāo)函數(shù)的精度影響較大,在初始階段,目標(biāo)函數(shù)值隨傳感器數(shù)量的增加而不斷減小;當(dāng)數(shù)量增加到一定范圍,目標(biāo)函數(shù)值趨于穩(wěn)定。
(4)以馬水河大橋?yàn)槔瑢GSA算法和遺傳算法得到的布置方案相比較,結(jié)果表明,AGSA算法的可靠性,尋優(yōu)效率都優(yōu)于遺傳算法,證實(shí)了本文提出的AGSA算法適用于傳感器優(yōu)化布置,也表明該算法可以滿足大型橋梁健康監(jiān)測(cè)的需求。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
