永磁同步電動機調速范圍的優化及性能分析
2021-04-06 12:11:48程獻會王淑紅
微特電機 2021年3期
關鍵詞:優化
程獻會,王淑紅
(太原理工大學 電氣與動力工程學院,太原 030024)
0 引 言
永磁同步電動機具有結構簡單、運行可靠、效率高等顯著優點,其應用范圍較為廣泛,在航空、國防、工業生產和日常生活中都可以看到它的身影[1-2]。
已有許多專家學者對永磁同步電動機進行過優化設計,從而使電機性能更優越,使用更廣泛。文獻[3]采用田口法,以電機的效率和磁鋼用量作為優化目標,對內嵌式永磁電動機進行優化設計;文獻[4]同樣采用田口法對鐵耗和轉矩脈動進行了優化。文獻[5-6]對電動汽車用永磁同步電動機進行了電磁設計和弱磁調速分析;文獻[7]中搭建了凸極式永磁同步電動機弱磁調速的控制系統;文獻[8]從內置式永磁同步電動機的數學模型及弱磁控制方式入手,采用數值計算方法,分析了不同參數對電機弱磁調速的影響;文獻[9]討論了永磁體分段對永磁同步電動機參數和調速范圍的影響;文獻[10]設置了一種分段Halbach結構的表貼式永磁同步電動機以降低渦流損耗等;文獻[11]對V形異步起動永磁同步電動機的齒槽轉矩進行了優化;文獻[12]采用多目標遺傳算法對不同類型的電機結構進行優化。
對于調速永磁同步電動機,在傳統的控制方法下,電機受到電源電壓和電流的限制,基速以上很難有較大的調速范圍。為了擴大電機的調速范圍,并確保電機的恒功率運行范圍和電機性能,不僅要采用帶有弱磁控制模塊的控制系統,電機本體參數也應與控制系統有較好的配合,滿足弱磁調速策略對電機參數的要求。永磁同步電動機的勵磁由電機轉子上的永磁體提供,永磁體在電機制作時已放置好,勵磁無法根據實際需要進行調節,所以在電機設計時應考慮永磁體的尺寸和位置,為弱磁調速控制提供合理的永磁體磁鏈及交直軸電感參數。
本文在電機設計過程中,以弱磁調速的倍數為電機永磁體尺寸的優化目標,使用有限元仿真軟件,對兩種不同形狀的永磁體電機進行參數化仿真,確定電機永磁體的位置和尺寸對電機調速范圍的影響。分析了矩形永磁體和V形永磁體在不同尺寸和位置,對電機參數的影響,給出永磁體的尺寸,完成對電機調速范圍的優化并分析電機性能。
1 永磁同步電動機弱磁調速的基本原理
1.1 永磁同步電動機的數學模型
在三相電流對稱、電機穩定運行且忽略定子繞組電阻、鐵心飽和、鐵耗的情況下,永磁同步電動機在d,q坐標軸下的數學模型如式(1)、式(2)。電壓方程:

(1)
電磁轉矩方程:
(2)
由電壓方程可得出:
(3)
式中:p為電機的極對數;Lq,Ld分別為電機定子的交直軸電感;iq,id分為電機定子的交直軸電流;ψf是電機的永磁體磁鏈;ω為電機角頻率。
由式(3)可以看出,當電機的端電壓和電流達到極限值,且電流全部為直軸去磁電流時,電機可以達到理想最大轉速:
(4)
調速永磁同步電動機的電壓和電流的極限值取決于控制系統的逆變器,如果需要更高的轉速范圍,需要減小永磁體的磁鏈和增加直軸電感。但過小的永磁體磁鏈會造成電機轉矩的下降,在電機優化時應綜合考慮,不應為了單純提高調速范圍而犧牲太多的轉矩。
1.2 基于最大轉矩電流比控制的弱磁調速性能分析
凸極永磁同步電動機采用最大轉矩電流比控制時,電機的電流矢量應滿足:
(5)
定子電流矢量軌跡如圖1所示,當電機的端電壓和電流達到極限值時,經過公式推導可得出此時的轉折速度:
(6)
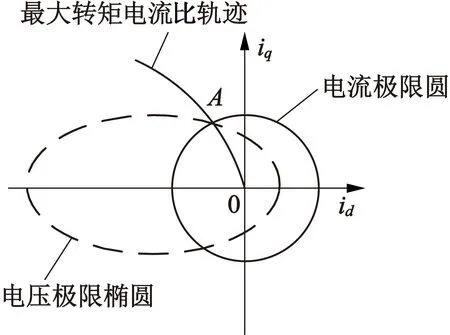
圖1 定子電流矢量軌跡

定義電機的弱磁擴速倍數:
(7)
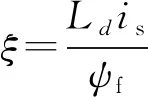

(8)

根據式(8)可得如圖2所示的凸極永磁同步電動機弱磁擴速倍數隨凸極率和弱磁率的變化曲線,可以看出,電機的弱磁擴速倍數隨凸極率和弱磁率的增加而增加。對永磁同步電動機的凸極率和弱磁率進行優化,便可以影響電機的擴速范圍。
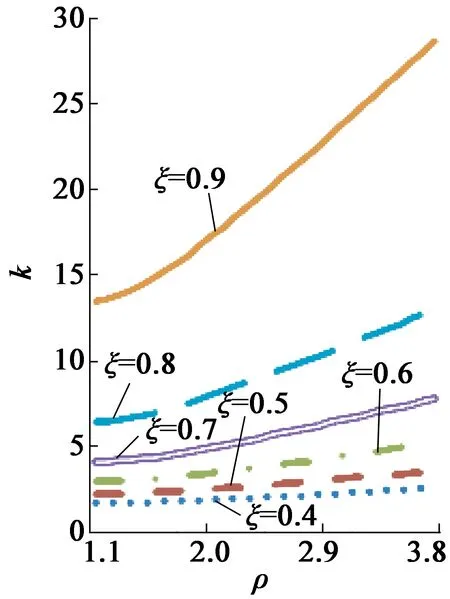
圖2 弱磁擴速倍數k與ξ,ρ的關系
2 永磁同步電動機優化
分別對原功率為2.2 kW,永磁體為矩形和V形的兩臺內置式永磁同步電動機進行優化,以弱磁率和凸極率為優化目標,使其滿足兩倍以上的調速范圍。
2.1 建立電機的物理模型
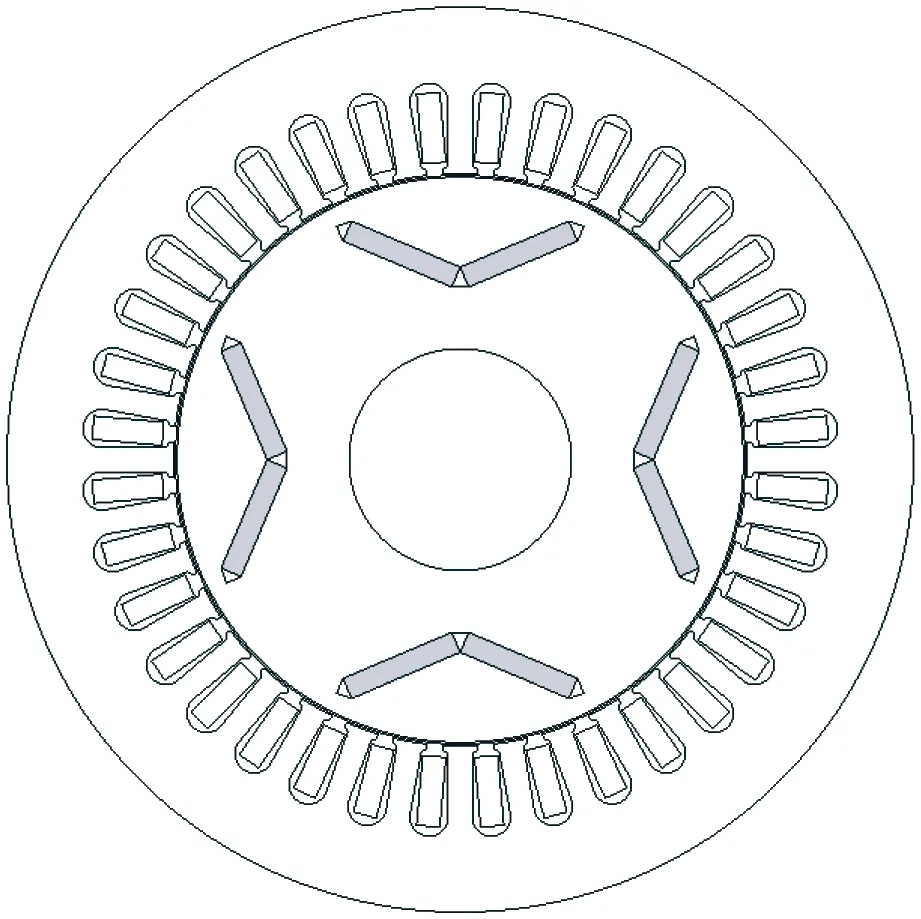
樣機的基本參數如表1所示,電機的物理模型如圖3、圖4所示。在電機基本結構尺寸不變的情況下,對電機的永磁體尺寸、位置進行優化,永磁體尺寸主要有永磁體寬度bm,永磁體磁化方向長度hm。矩形永磁體的位置主要靠軸心距確定,就是永磁體下邊緣距離電機中心的距離,即o2。軸心距越大,永磁體離氣隙越近,離電機轉軸的中心則越遠。V形永磁體的位置還要依靠永磁體旋轉角度來確定,旋轉角為θ。
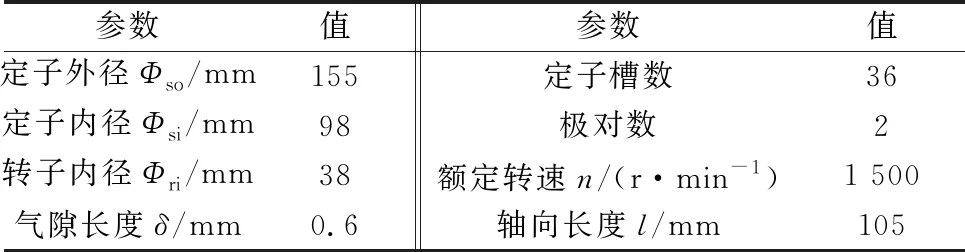
表1 電機的基本參數
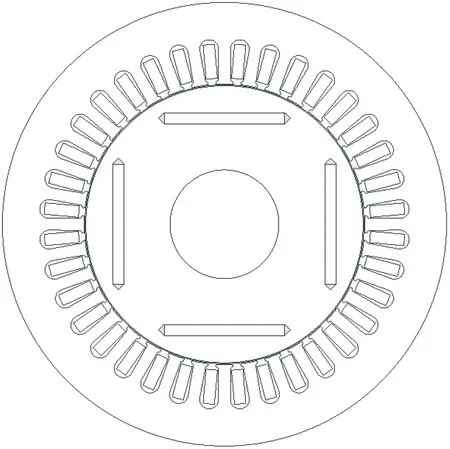

圖3 矩形永磁體電機模型
2.2 電機的優化
在初步確定電機額定電流的情況下,對永磁體的尺寸范圍進行優化設計。利用Maxwell軟件,分別建立兩種永磁同步電動機的2D模型,并設置永磁體寬度、磁化方向長度和軸心距為參數化變量,求解不同情況下的凸極率和弱磁率,參數化范圍如表2、表3所示。

表2 矩形永磁體參數
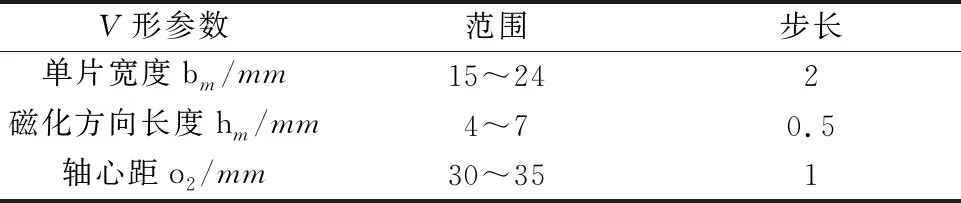
表3 V形永磁體參數
對在此范圍內的所有不同組合進行參數化掃描仿真,并進行最優化求解,最優化算法采用默認的擬牛頓算法,它是求解非線性優化問題最有效的方法之一,收斂速度快。最優化求解的目標為ρ≥1.5,ξ≥0.5,由圖2可以看出,理論上滿足3倍的調速范圍。經過Maxwell的最優化求解,可得出永磁體寬度、永磁體磁化方向長度和軸心距的初選結果。
2.2.1 永磁體的尺寸確定
經過分析和有限元軟件的計算,可得到ρ和ξ隨電機永磁體尺寸的參數變化規律。矩形永磁體和V形永磁體的變化規律都是隨著電機永磁體厚度和磁化方向的增加,ρ增加且ξ下降;永磁體寬度對兩個參數的影響更明顯,如圖5、圖6所示。

(a) 矩形永磁體電機

(b) V形永磁體電機

(a) 矩形永磁體電機
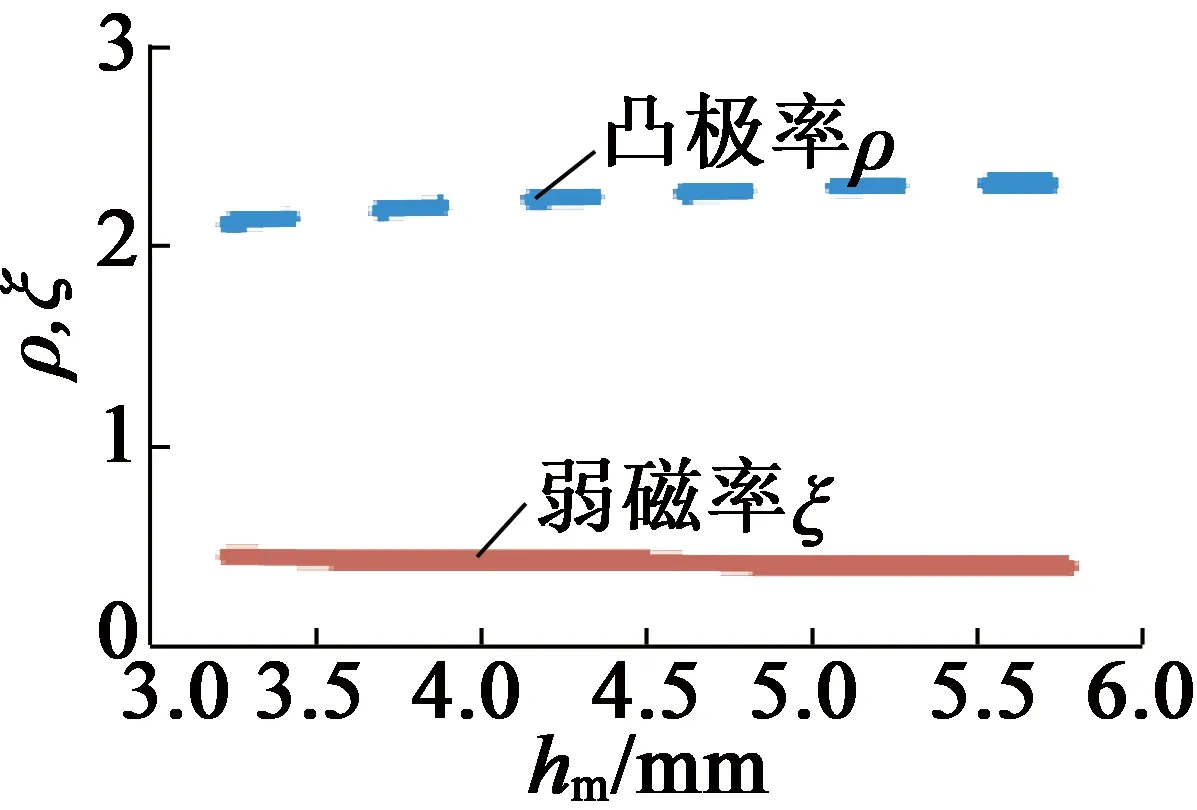
(b) V形永磁體電機
兩個優化參數變化趨勢并不相同,在有限元優化求解給出的結果下,要想達到優化目標,并考慮制作工藝難度。最后確定矩形永磁體尺寸確定為寬42mm,厚4mm;V形永磁體尺寸確定為單片永磁體寬20mm,厚4mm。
2.2.2 永磁體的位置確定
在永磁體尺寸確定的情況下,隨著軸心距的增加,如圖7所示,矩形永磁體電機的ρ會增加,ξ會下降;V形永磁體電機的ρ和ξ呈相同變化規律,凸極率增加,弱磁率下降。
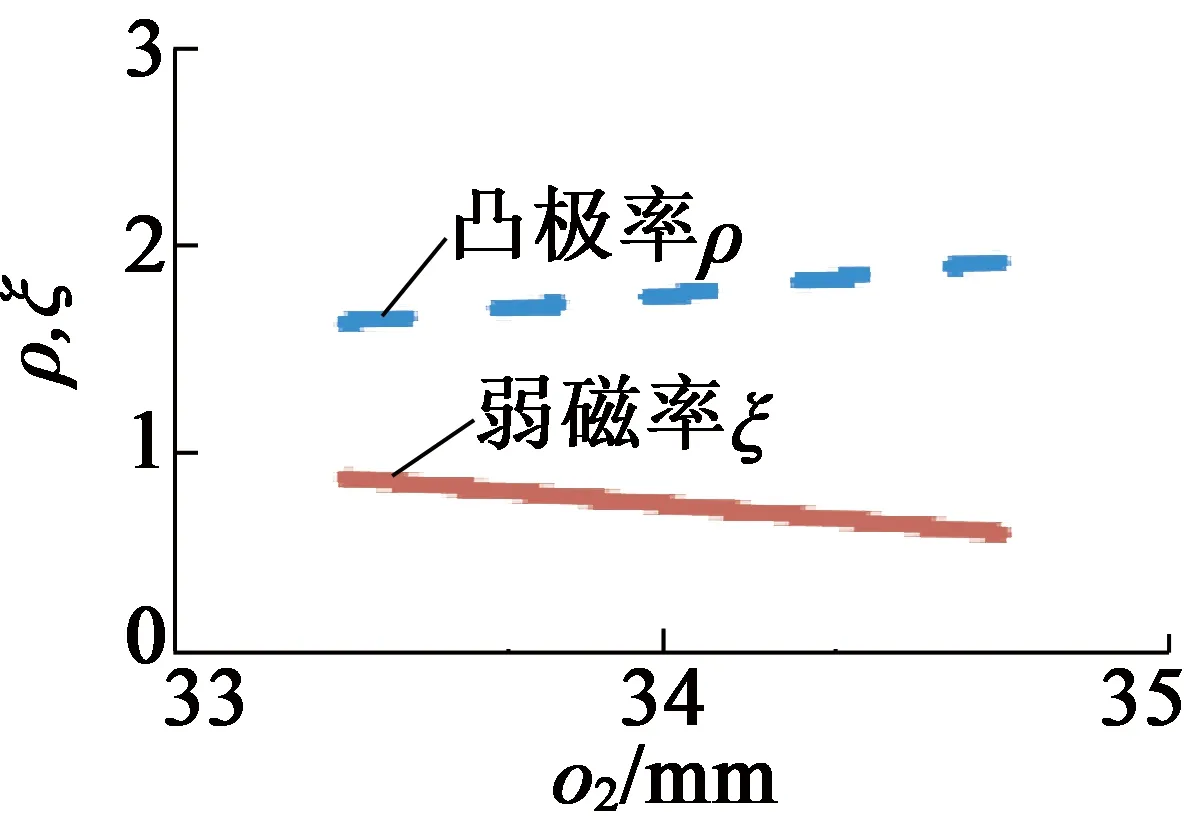
(a) 矩形永磁體電機
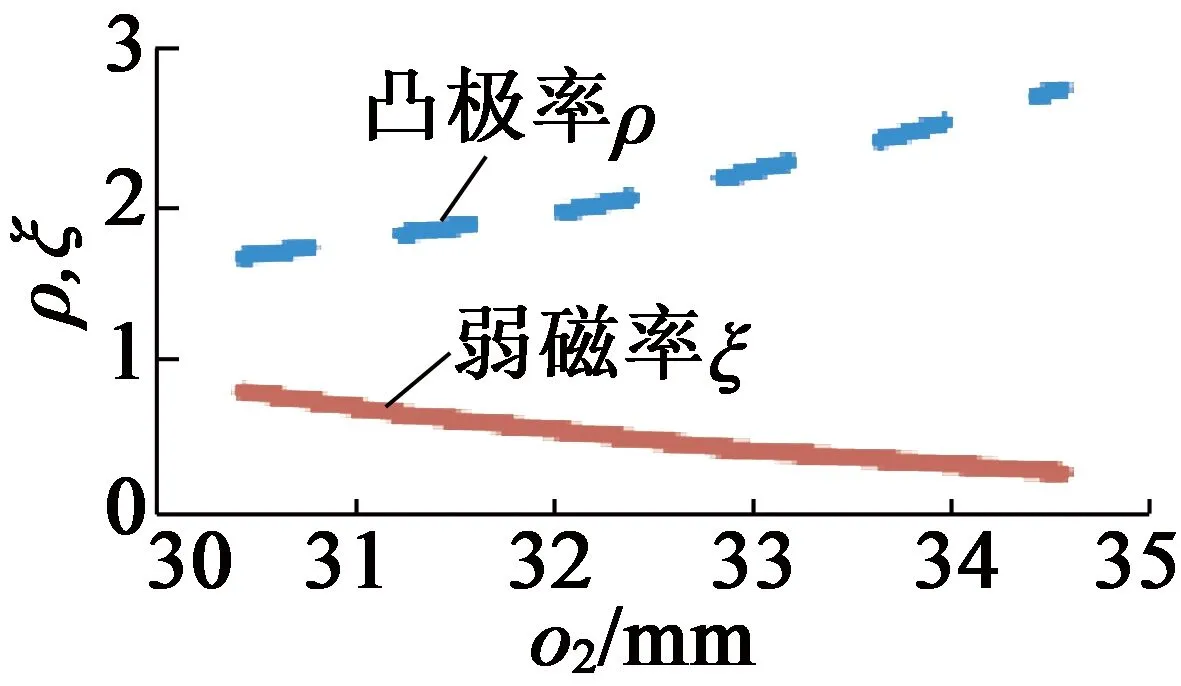
(b) V形永磁體電機
經過優化求解,矩形永磁體電機軸心距選擇35mm;V形永磁體電機軸心距選擇33mm。
V形永磁體不僅要考慮軸心距,還要考慮永磁體旋轉的角度θ對交直軸電感的影響。如圖8所示,隨著旋轉角度的增加,凸極率上升,弱磁率下降,最終旋轉角選擇23°。
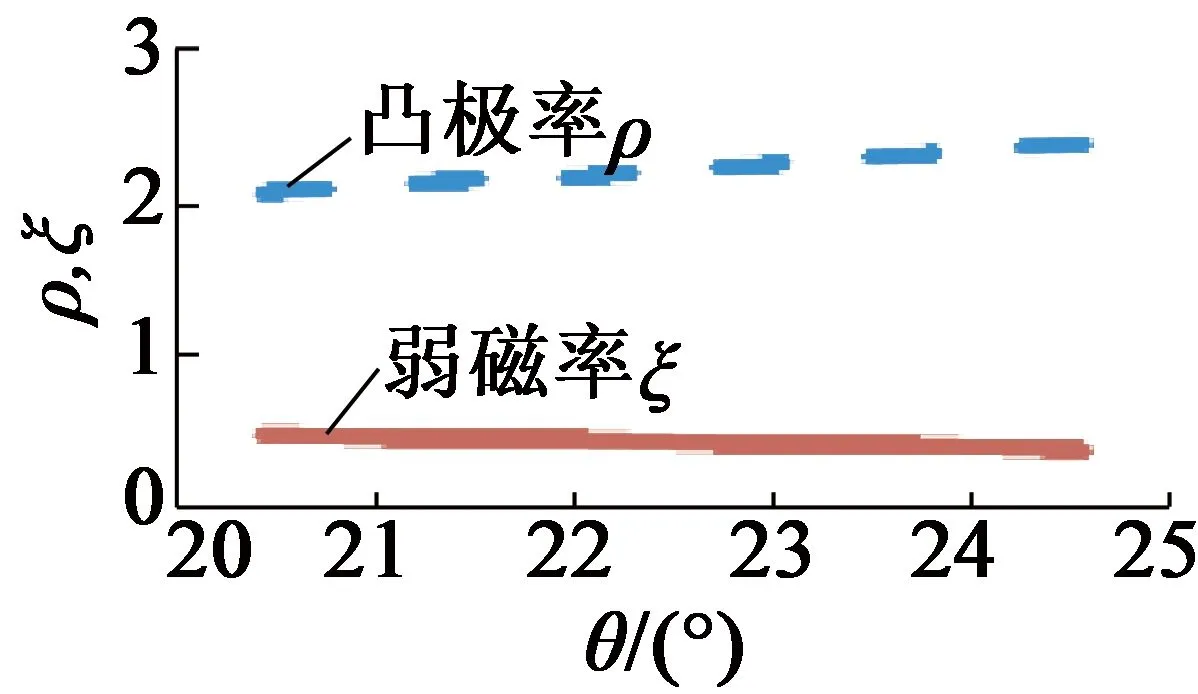
圖8 凸極率和弱磁率隨旋轉角度的變化
3 電機參數分析與對比
3.1 矩形永磁體電機
在永磁體尺寸和位置確定之后,對電機模型進行有限元仿真,電機的直軸電感為0.074H,交軸電感為0.143H,磁鏈為0.608Wb,仿真得出凸極率為1.93,弱磁率為0.597,滿足求解目標。
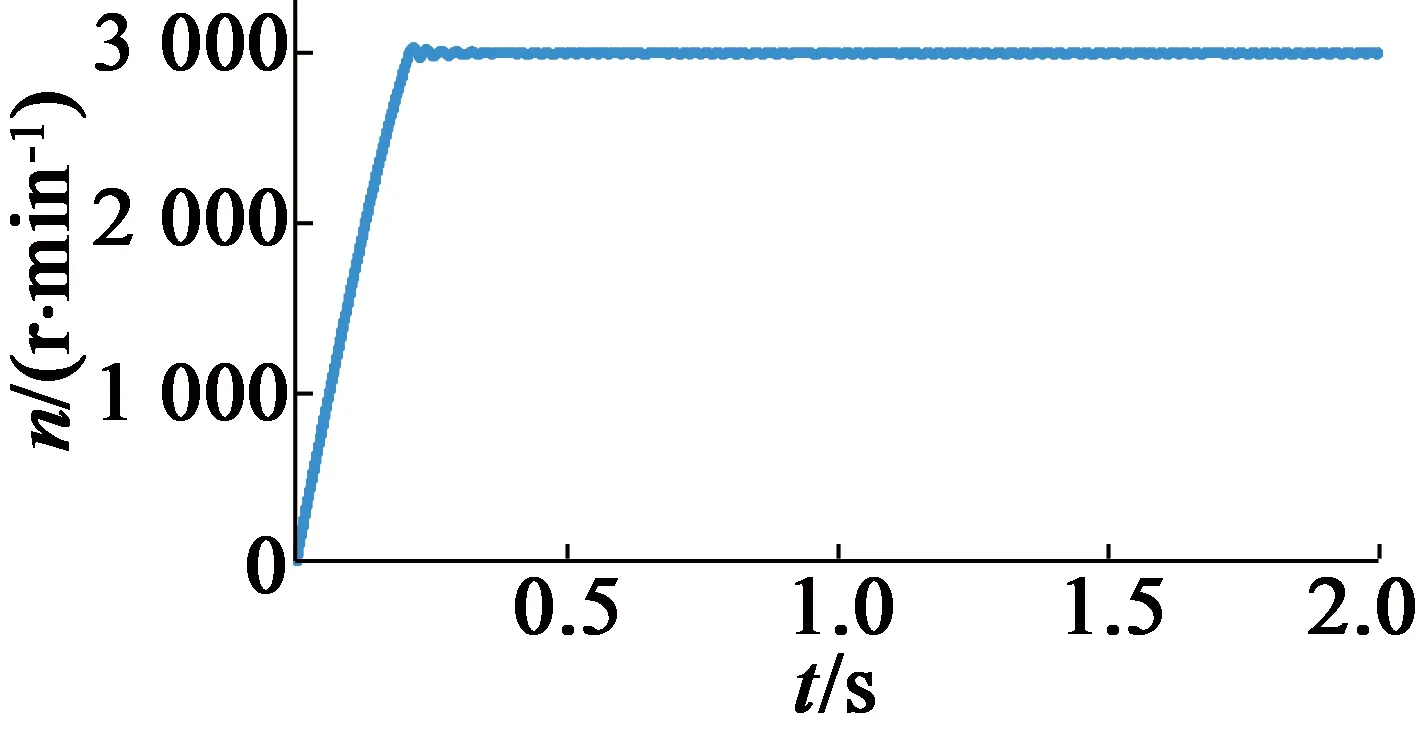
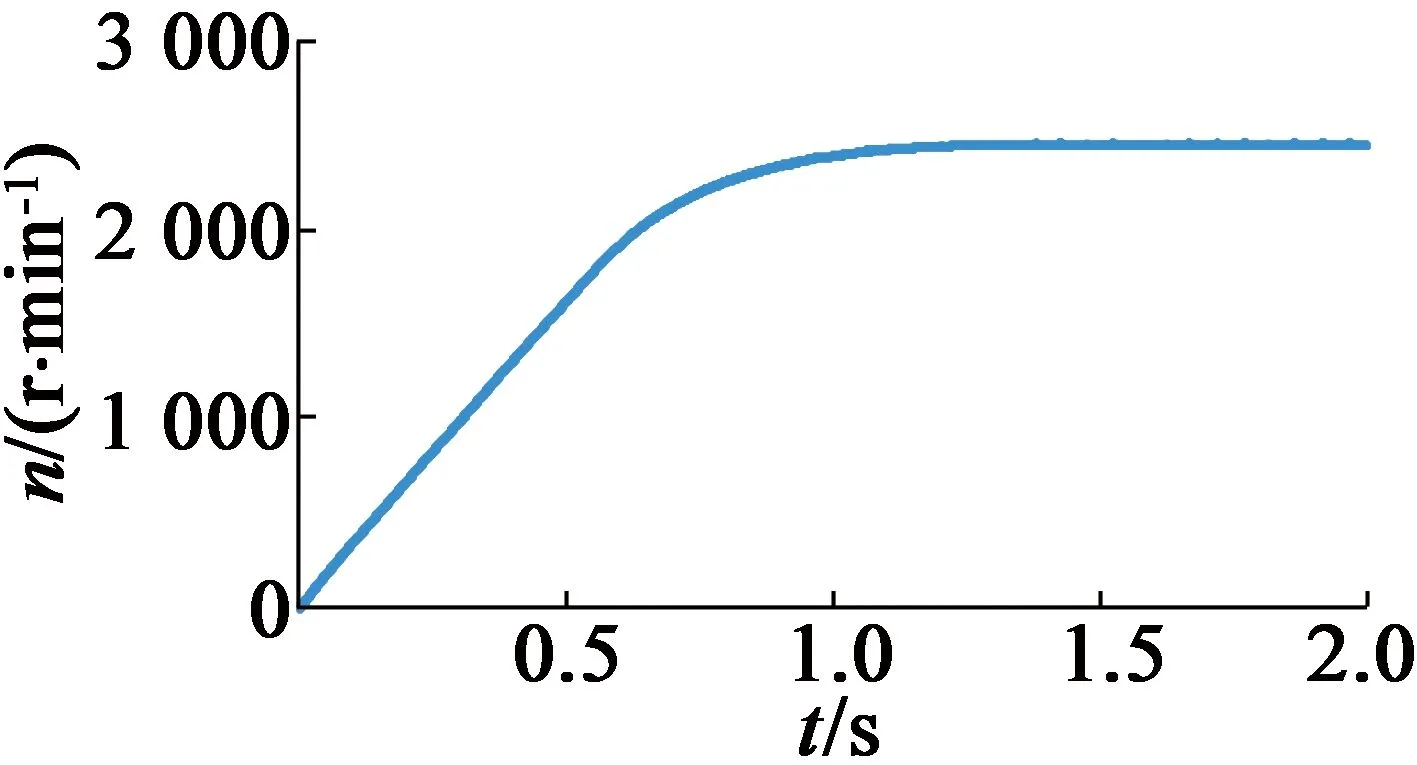
對優化后的電機進行MATLAB仿真分析,采用基于最大轉矩電流比的弱磁控制方式,控制框圖如圖9所示。在空載及負載條件下進行仿真分析,對比優化前后電機的調速范圍,結果如表4、圖10所示。可以看出,優化后空載條件下調速范圍可以達到兩倍以上,負載下調速范圍也明顯提高,達到了優化的目的。
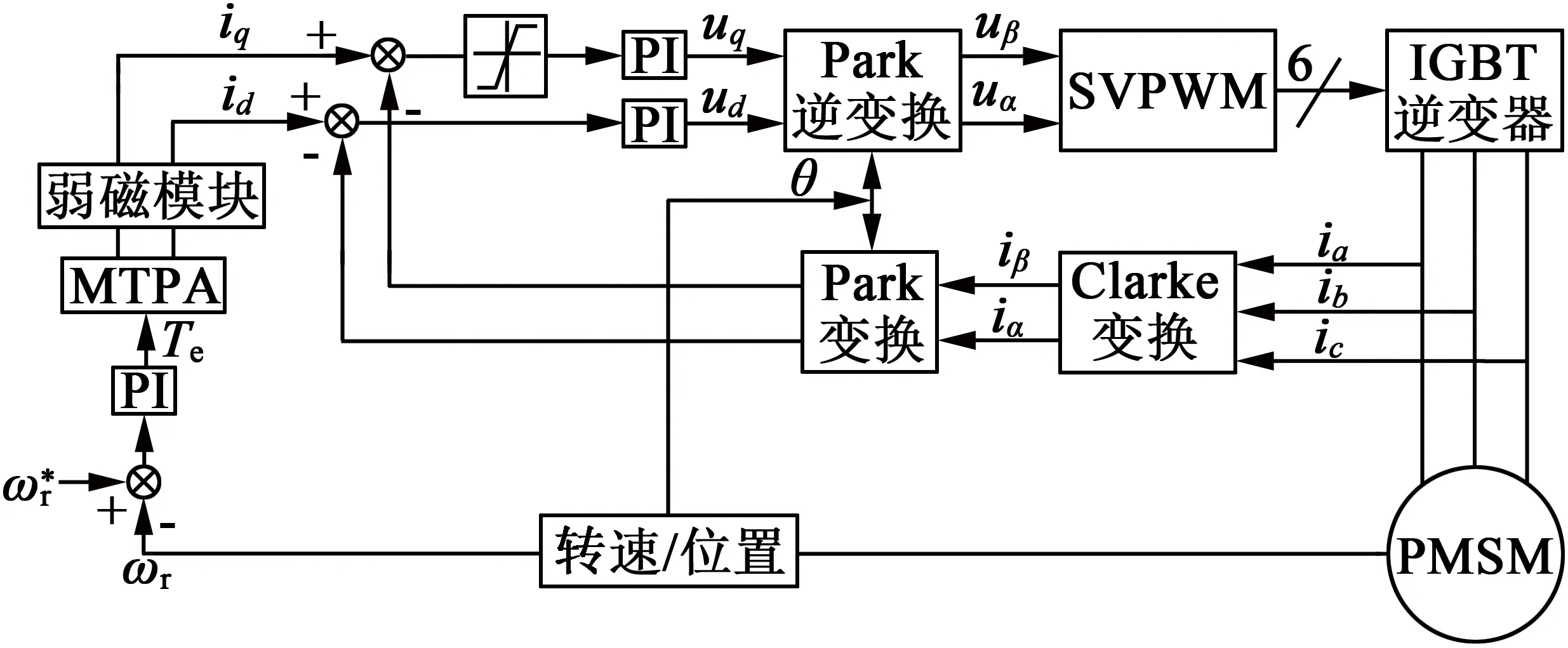
圖9 弱磁控制框圖
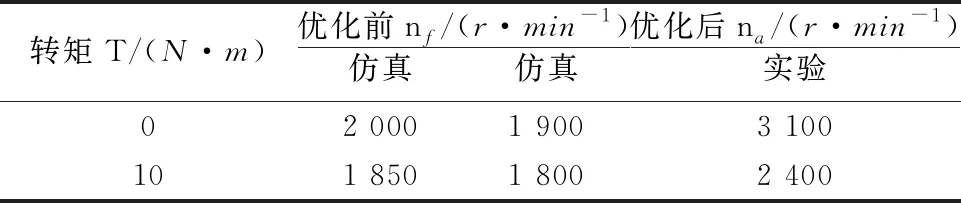
表4 矩形永磁體電機最高轉速對比
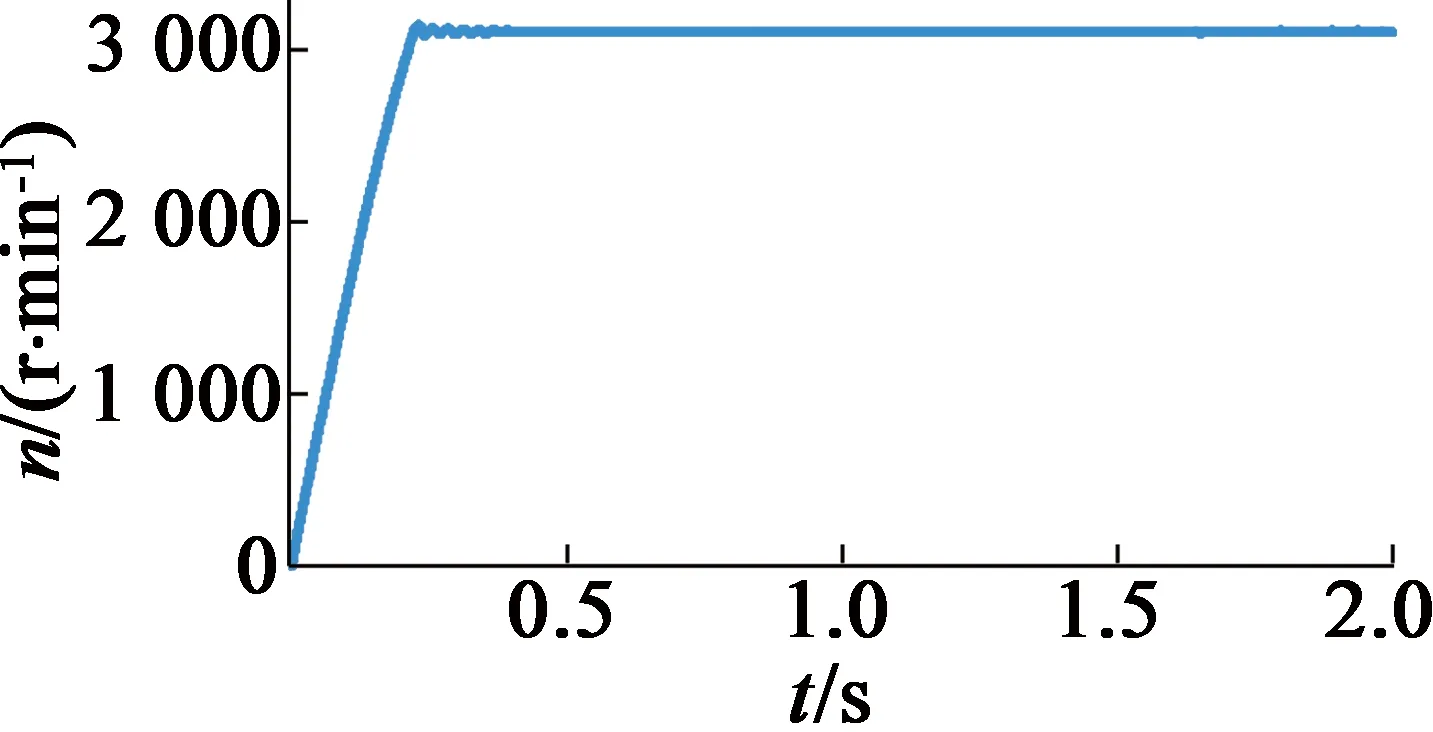
(a) 空載下電機轉速
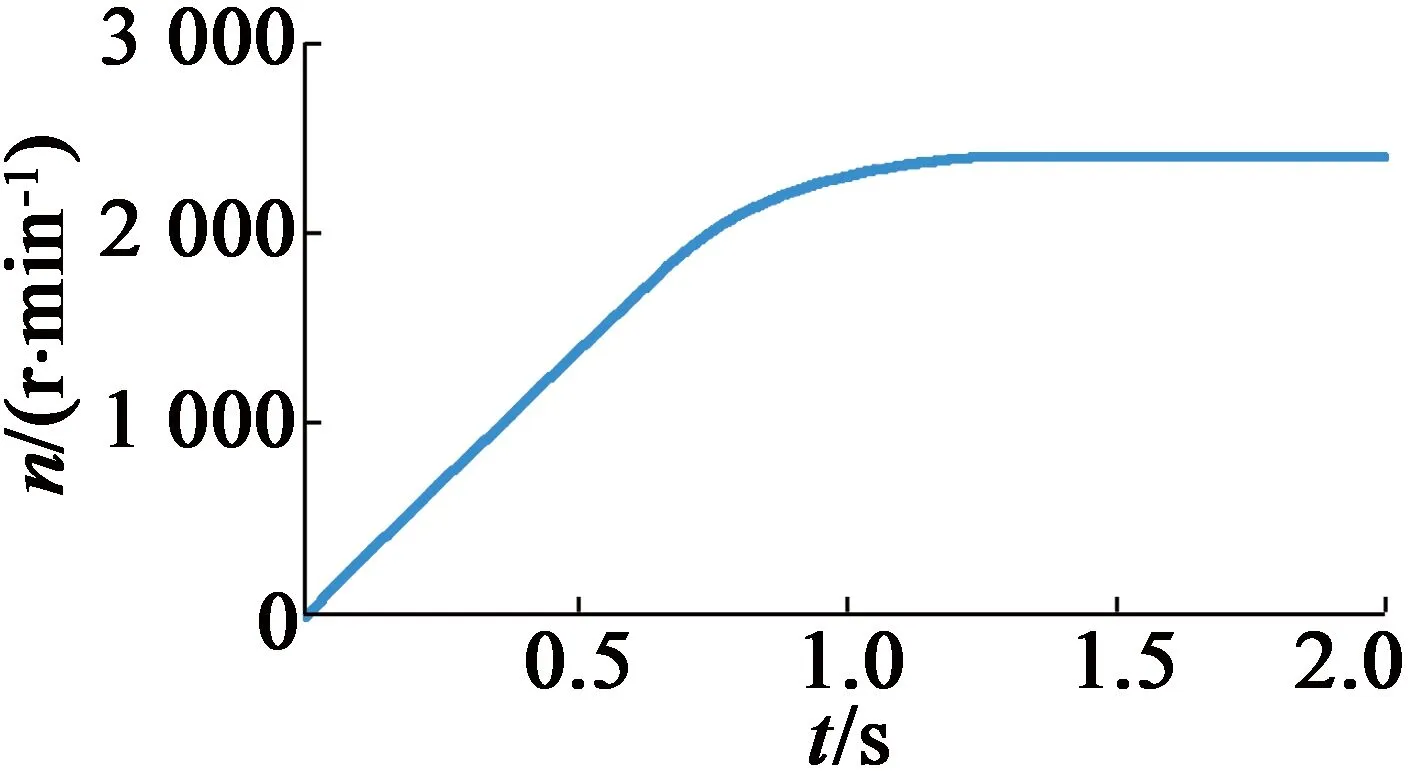
(b) 負載下電機轉速
3.2 V形永磁體電機
對確定永磁體位置和尺寸的電機模型進行有限元仿真,電機的直軸電感為0.073H,交軸電感為0.142H,磁鏈為0.635Wb,凸極率為1.96,弱磁率為0.56,滿足求解要求。
對優化后的V形永磁體電機,進行基于最大轉矩電流比的弱磁調速控制下的空載及負載仿真,結果如表5所示。空載可以達到兩倍左右的調速范圍,負載下速度也有所提高,滿足優化目標,如圖11所示。
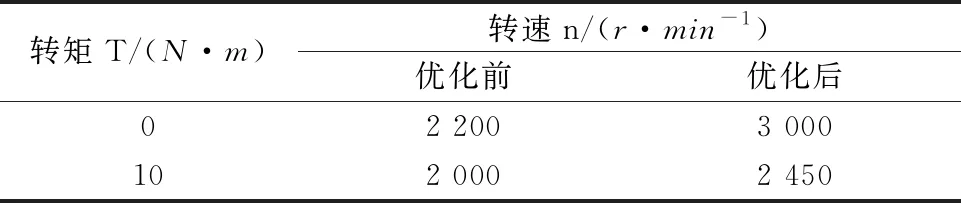
表5 V形永磁體電機最高轉速對比
(a) 空載下電機轉速
(b) 負載下電機轉速
4 結 語
本文借助有限元仿真軟件,以內嵌式永磁同步電動機的調速范圍為優化目標,討論了矩形和V形永磁體不同尺寸和位置對電機參數的影響,結合對調速范圍的影響,確定了電機永磁體的尺寸和位置,完成了電機的優化設計。以優化完成的電機尺寸,對其進行參數分析和對比,較之前的電機有了明顯的轉速范圍的提升,達到了本次優化的目的。優化過程和結果對內嵌式永磁同步電動機的設計和參數提供了一定的參考。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45