考慮輸入飽和的PMSM命令濾波離散控制
2021-04-06 12:12:10徐雨夢于金飛崔英英于金鵬劉加朋
微特電機 2021年3期
徐雨夢,于金飛,崔英英,于金鵬,劉加朋
(1.青島大學 自動化學院,青島 266071;2.淄博市技師學院,淄博 255025;3.山東勞動職業技術學院,濟南 250022)
0 引 言
近幾十年,永磁同步電機(以下簡稱PMSM)憑借使用壽命長、操作簡單以及造價低等優點,在電機拖動系統中得到較大的關注。但是,PMSM具有強耦合、多變量以及高度非線性等特點,并且具有外部負載擾動、參數不確定的設計難題。為克服以上缺點,許多學者提出了不同的控制方法,如反步控制[1]、滑模控制[2]和自適應控制[3-4]等。
反步法在解決非線性問題中具有重大突破,并在PMSM中應用廣泛。文獻[5]在設計控制器的過程中需要計算虛擬控制函數的差分,隨著系統階數的增加,“計算復雜性”問題產生。通過進一步改進,文獻[6]采用動態面技術解決了文獻[5]中產生的“計算復雜性”問題,但是在使用一階濾波器的過程中會產生濾波誤差,降低了PMSM的控制性能。文獻[7-8]將命令濾波技術與反步法結合,不僅避免反步法中的“計算復雜性”問題,而且還消除了濾波誤差,提高了控制器的控制精度。
然而,上述控制方法沒有充分考慮輸入飽和非線性帶來的不利影響。在控制系統中不可避免地存在飽和非線性項,這將增加算法的計算量,系統的穩定性也會降低。輸入飽和非線性對PMSM的影響,學者們采用輸入飽和技術解決。文獻[9]將輸入飽和以及命令濾波技術結合,來解決輸入飽和問題。然而,文獻[9]是基于連續時間電機控制器設計的,與連續時間系統相比,離散系統在可實現性和穩定性方面具有優越性,且在數字計算機中應用廣泛,更易于描述實際問題。因此,本文提出了輸入飽和的PMSM命令濾波離散控制。與傳統的控制方法相比,本文設計控制器的優點有:
(1) 將輸入飽和技術應用于離散系統,并采用分段光滑函數來逼近輸入飽和問題,避免對電機造成危害,更適用于實際控制中。
(2) 采用命令濾波技術克服了傳統反步法中出現的“計算復雜性”問題,運用補償信號能夠解決濾波誤差問題,降低了控制器設計的復雜度,提高了控制精度。
(3) 神經網絡技術用來逼近系統中的飽和非線性函數,降低輸入飽和對系統造成的不良影響。
從仿真結果可以看出,設計的控制器在考慮飽和非線性的影響下仍具有良好的位置跟蹤性能,提高了PMSM運行的穩定性。
1 PMSM離散模型
在同步旋轉坐標系d,q軸下,描述PMSM的離散模型[10]:
Θ(k+1)=ΔTω(k)+Θ(k)

式中:Θ為轉子角度;ω為轉子角速度;J為轉動慣量;ids,iqs為d軸和q軸的電流;uds,uqs為d軸和q軸的電壓;B為摩擦系數;p為磁極對數;Rs為定子等效電阻;ld,lq為定子側的等效電感;Φ為永磁體的磁鏈;ΔT為采樣周期;Tl為負載轉矩。

利用新定義的符號,PMSM離散模型如下:
(1)
uqs(k)為PMSM的電壓輸入信號,uqs(k)描述:
式中:uqsmax>0和uqsmin<0是未知的常數;vq(k)是飽和非線性的輸入信號。
通過使用分段的平滑函數來近似飽和函數,定義函數如下:
將uqs(k)改寫成:
uqs(k)=sat[vq(k)]=g[vq(k)]+Y[vq(k)]
式中:Y[vq(k)]=sat[vq(k)]-g[vq(k)]是有界函數,其邊界:
|Y[vq(k)]|=|sat[vq(k)]-g[vq(k)]|≤max{uqsmax[1-tan(1)],uqsmin[tan(1)-1]}=D
式中:D是一個常數。
根據中值定理可知,存在0<λ<1,使得:
g[vq(k)]=g[vq(0)]+gvλ(k)[vq(k)-vq(0)]
其中,gvλ(k)={g[vq(k+1)]-g[vq(k)]}|vq(k)=vλ(k),vλ(k)=λvq(k)+(1-λ)vq(0),vq(0)=0,可以得到:g[vq(k)]=gvλ(k)vq(k),從而,uqs(k)=gvλ(k)vq(k)+Y[vq(k)]。
同理可得:uds(k)=gvλ(k)vd(k)+Y[vd(k)]。
引理1[12]:
定義命令濾波如下:
Zl,1(k+1)=WnZl,2ΔT+Zl,1(k)
Zl,2(k+1)=[-2ξWnZ2(k)-Wn[Zl,1(k)]-
αl(k)]ΔT+Zl,2(k)
如果輸入信號|αl(k+1)-αl(k)|≤ρ1和|αl(k+2)-2αl(k+1)+αl(k)|≤ρ2,對于所有的k≥1均成立,其中ρ1和ρ2是正的常數,并且Zl,1(0)=αl(0),Zl,2(0)=0,對于任意ε>0,存在ξ∈(0,1]和Wn>0,例如|Zl,1(k)αl(k)|≤ε是有界的。
本文設計控制器的目的是,考慮系統的輸入飽和影響后,設計的控制器仍保證位置跟蹤性能,使控制器的輸入信號x1穩定跟蹤給定信號x1d。
2 命令濾波控制器設計
根據反步法原理,定義系統誤差和補償信號:
式中:x1d(k)為給定的期望信號;命令濾波器的輸入和輸出信號分別為αr,αrd,r=1,2;ξj為補償信號,j=1,2,3,4。
1) 將離散模型式(1)的第1個方程寫成:
v1(k+1)=e1(k+1)-ξ1(k+1)=x1(k)+
ΔTx2(k)-x1d(k+1)-ξ1(k+1)

(2)
構造虛擬控制函數α1(k)和補償信號ξ1(k):
(3)
ξ1(k+1)=ΔT[ξ2(k)+α1d(k)-α1(k)+t1ξ1(k)]
(4)
式中:|t1|≤1。由式(3)和式(4)可得:
(5)
2) 將離散模型式(1)的第2個方程寫成:
v2(k+1)=e2(k+1)-ξ2(k+1)=
(1+ΔTa2)x2(k)+a1ΔTx3(k)+
a3ΔTx3(k)x4(k)+a4ΔTTl-
α1d(k+1)-ξ2(k+1)
a3ΔTx3(k)x4(k)+a4ΔTTl-
α1d(k+1)-ξ2(k+1)]2-
(6)
構造虛擬控制函數α2(k)和補償信號ξ2(k):
(7)
ξ2(k+1)=a1ΔT[ξ3(k)+α2d(k)-α2(k)+t2ξ2(k)]
(8)
式中:|t2|≤1。由式(7)和式(8)可得:
a3ΔTx3(k)x4(k)+a4ΔTTl}2-
在實際PMSM系統中,由于所帶負載都是有限的,故假設|Tl|≤d,d為正常數。
根據楊氏不等式可得:
(9)
3) 將離散模型式(1)的第3個方程寫成:
v3(k+1)=e3(k+1)-ξ3(k+1)=
(1+b1ΔT)x3(k)+b2ΔTx2(k)+
b3ΔTx2(k)x4(k)+b4ΔTuqs(k)-
α2d(k+1)-ξ3(k+1)
(10)
f3(k)=(1+b1ΔT)x3(k)+b2ΔTx2(k)-
α2d(k+1)+b3ΔTx2(k)x4(k)-ξ3(k+1)

(11)
式中:f3(k)為一未知的非線性函數,z3(k)=[x1(k),x2(k),x3(k),x4(k)]T,τ3表示逼近誤差,并滿足不等式|τ3|≤ε3,‖W3‖是向量W3的范數。
(12)

‖S3[z3(k)]‖e3(k+1)
(13)


(14)
4) 將離散模型式(1)的第4個方程寫成:
v4(k+1)=x4(k+1)-ξ4(k+1)=(1+c1ΔT)x4(k)+c2ΔTx2(k)x3(k)+c3ΔTuds(k)-ξ4(k+1)
(15)
f4(k)=(1+c1ΔT)x4(k)+c2ΔTx2(k)x3(k)

(16)
式中:f4(k)為一未知的非線性函數,z4(k)=[x1(k),x2(k),x3(k),x4(k)]T,τ4表示逼近誤差,并滿足不等式|τ4|≤ε4,‖W4‖是向量W4的范數。
(17)

γ4‖S4[z4(k)]‖e4(k+1)
(18)


(19)
將式(5)、式(9)和式(14)代入式(19)可得:





(20)
3 穩定性分析
(21)


ei(k+1)-2γi‖Si[zi(k)]‖·
由楊氏不等式和‖Si[zi(k)]‖2≤li可得:
(22)
(23)
(24)
(25)

(26)

(27)


式中:

4 仿真結果分析
為了證實本文方法的可行性,把命令濾波和動態面方法進行對比,并且考慮輸入飽和的影響,在MATLAB環境下進行仿真。

表1 PMSM模型參數
表2 控制器參數
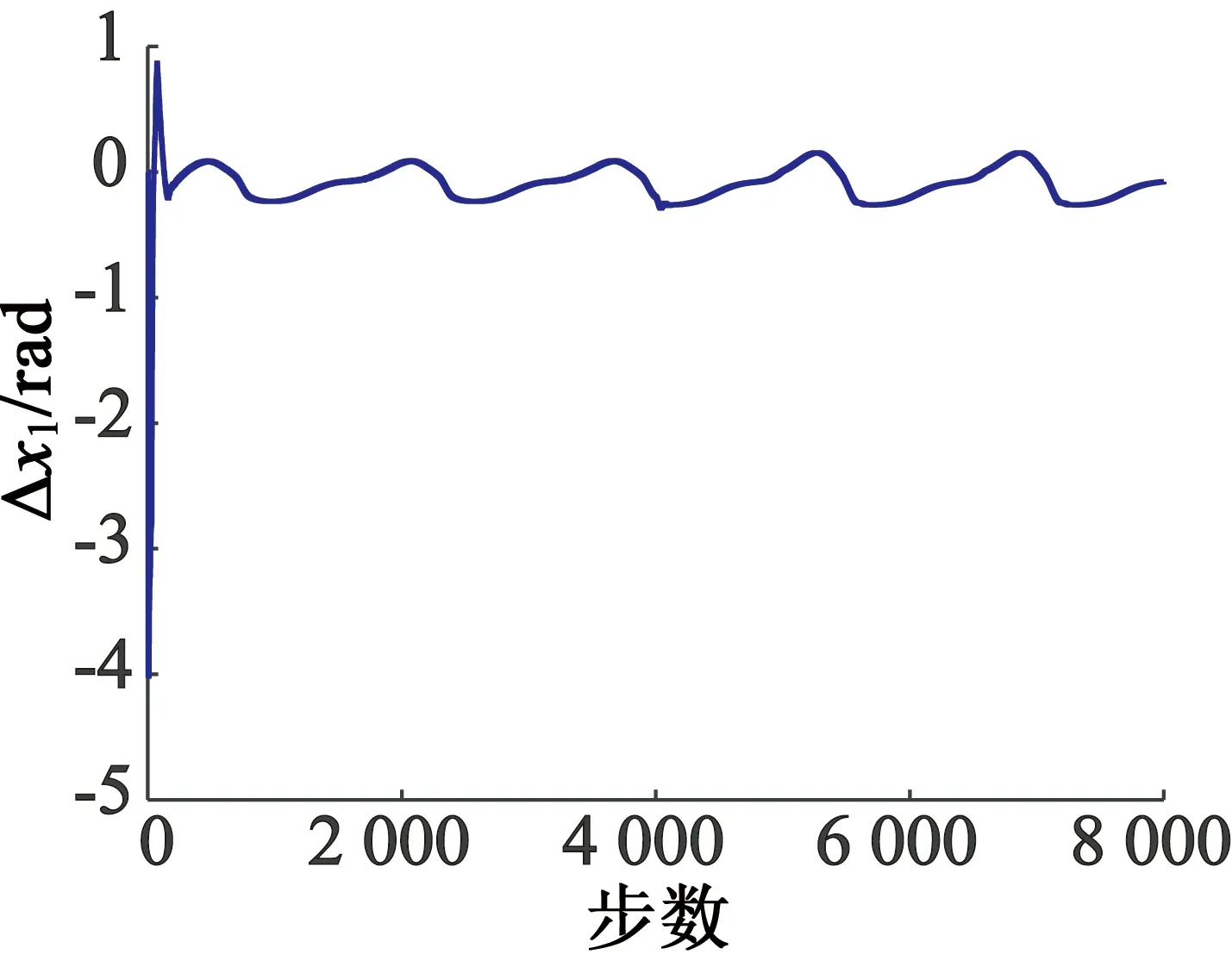
仿真結果如圖1~圖4所示。圖1、圖2為命令濾波和動態面的位置跟蹤波形以及位置跟蹤誤差曲線。可以看出,命令濾波控制的跟蹤誤差比動態面的誤差小,跟蹤效果更好。文獻[5]在反步法中會產生“計算復雜性”問題,而命令濾波控制相比于動態面控制不僅解決了“計算復雜性”問題,而且引進補償信號消除了濾波誤差,使控制器的算法設計更加簡單,位置跟蹤效果更好。圖3表示命令濾波和動態面q軸電壓軌跡曲線。可以看出,兩種方法都能夠解決輸入飽和的影響。uqs是PMSM的電壓輸入信號,vq是飽和非線性輸入信號,電壓突變損壞電機正常運行,因此利用輸入飽和技術將飽和非線性輸入信號限制在合理范圍。圖4表示命令濾波和動態面d軸電壓軌跡曲線。與文獻[6]的動態面方法相比,本文的命令濾波控制的位置跟蹤效果更好,跟蹤誤差更小。

(a) 命令濾波
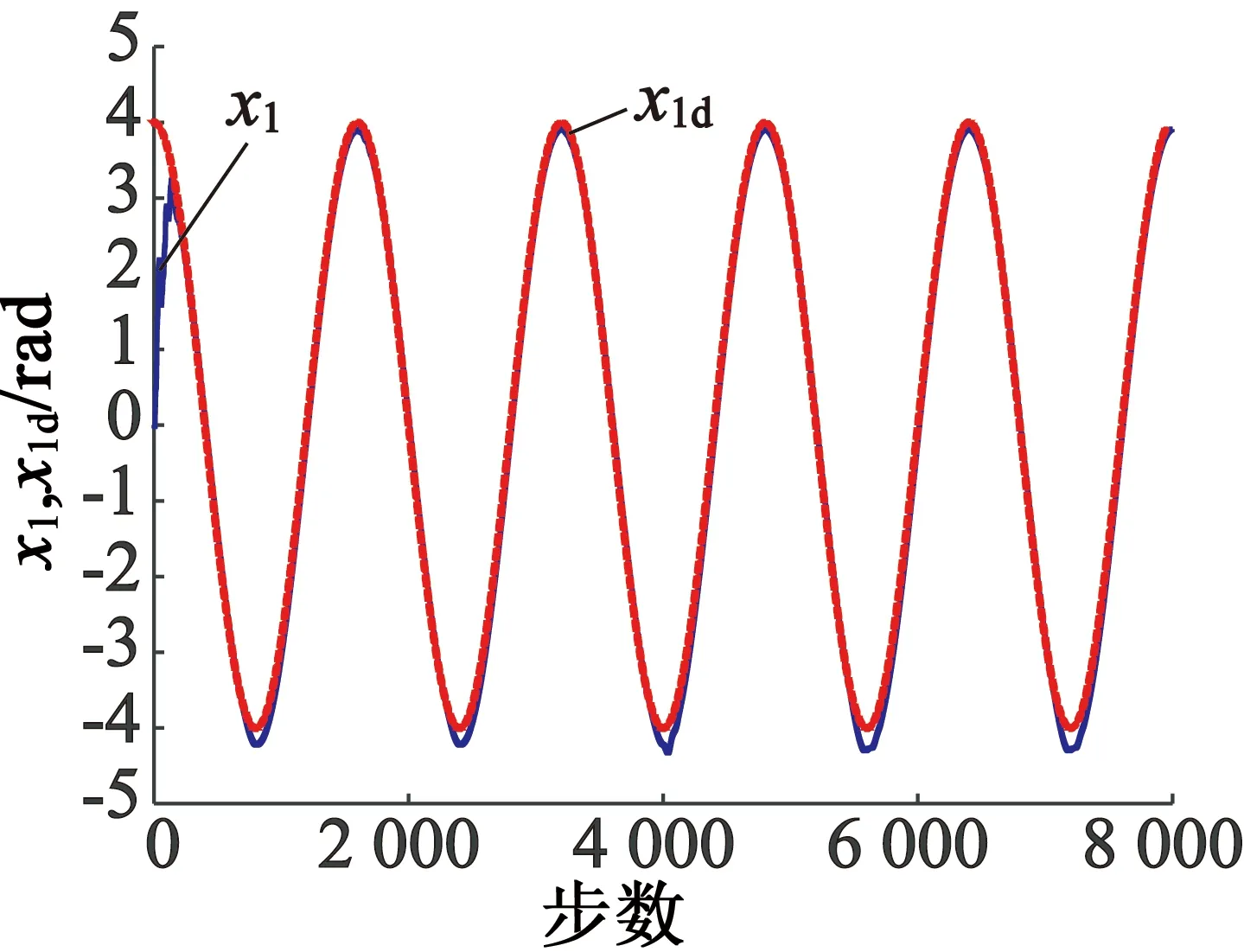
(b) 動態面
(a) 命令濾波
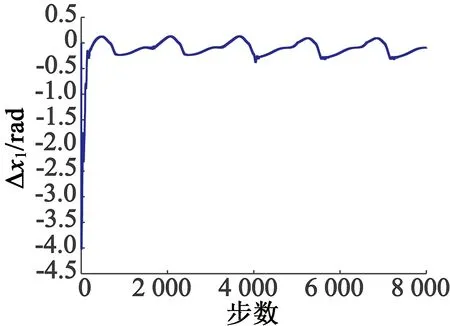
(b) 動態面
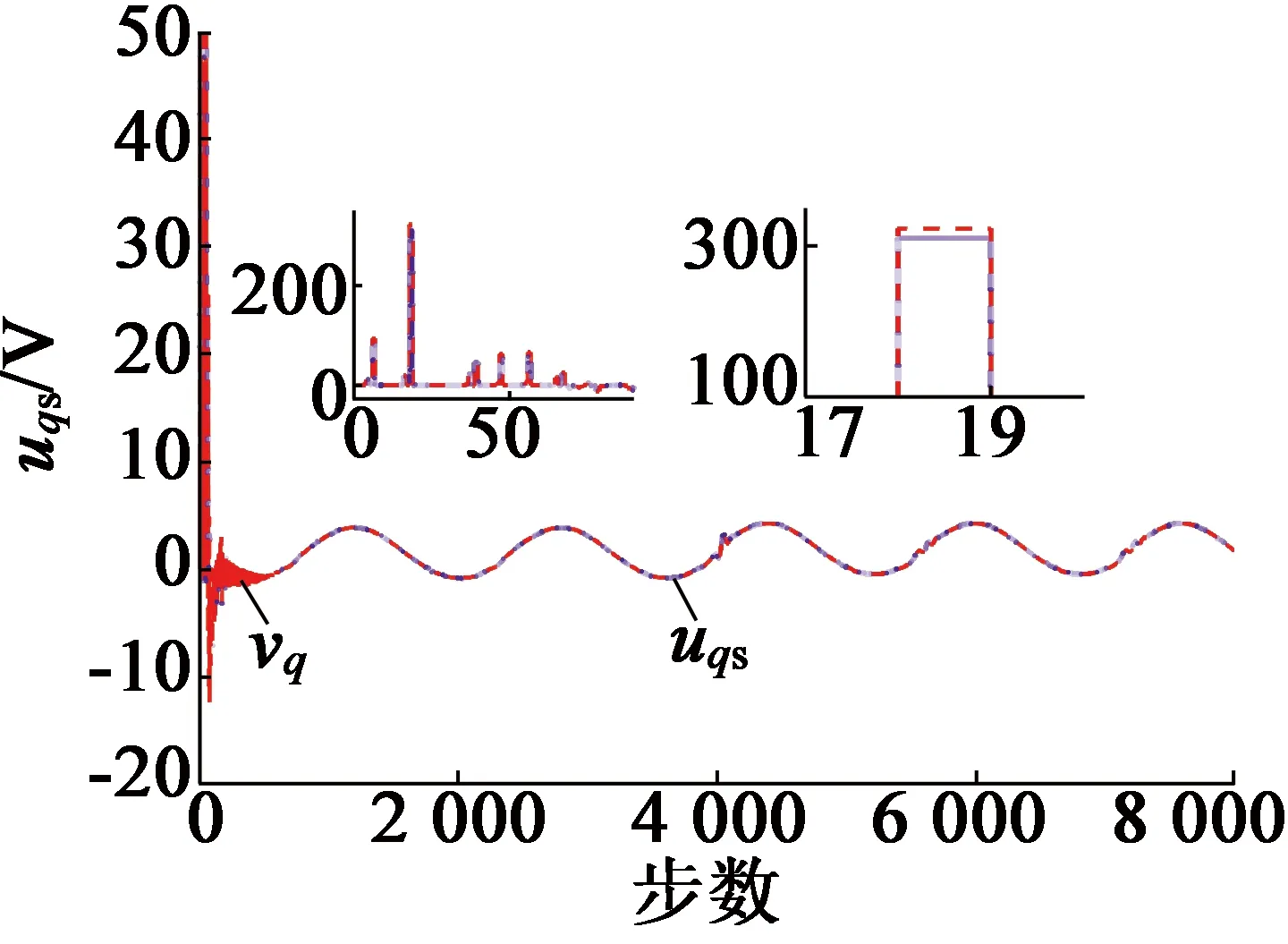
(a) 命令濾波
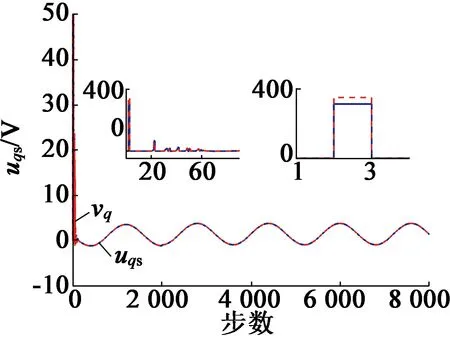
(b) 動態面
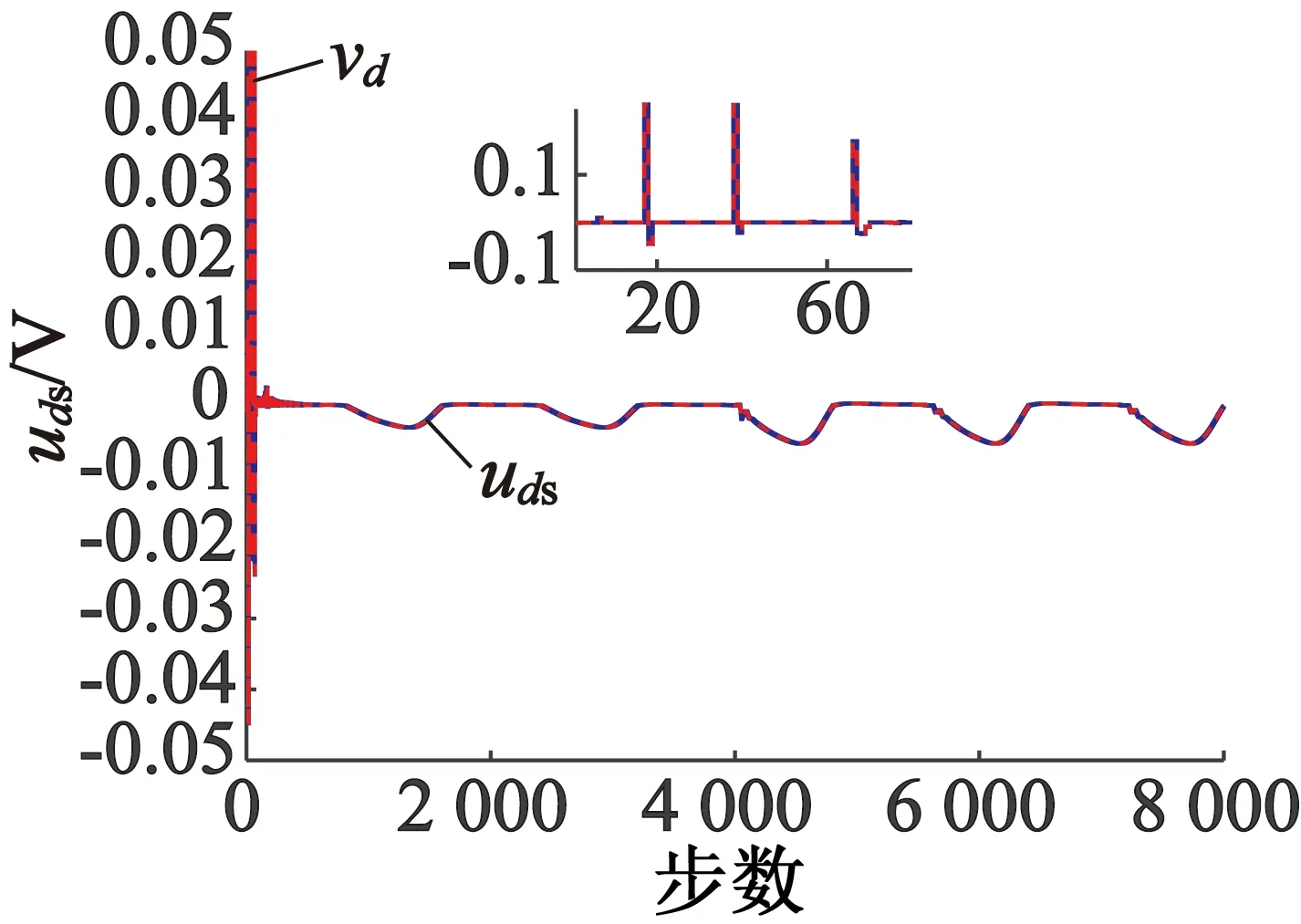
(a) 命令濾波
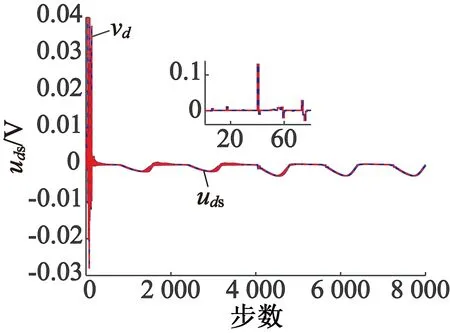
(b) 動態面
5 結 語
本文研究了PMSM命令濾波離散控制方法,設計的控制器考慮了輸入飽和的影響。應用命令濾波技術,解決了傳統反步法中存在的“計算復雜性”問題,引入補償信號,消除了濾波誤差;運用神經網絡技術逼近系統中的飽和非線性函數。最后,利用Lyapunov穩定性證明了閉環系統是穩定的。仿真結果驗證,本文的控制方法在輸入飽和的影響下有較好的位置跟蹤性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00