大時滯系統中Smith控制算法改進與應用
2021-04-08 13:18:54曹學海邱國鵬盧文杰
黑龍江工業學院學報(綜合版) 2021年1期
曹學海,于 敏,邱國鵬,盧文杰
(三明學院,福建 三明 365000)
在實際生產應用中,由于工況復雜,外界因素多變等原因,大部分控制系統存在時滯現象。面對時滯系統閉環特征方程具有時滯項的問題,傳統PID控制不能立刻產生抑制作用[1-2]。針對系統時滯問題,史密斯提出了Smith預估控制方案,通過預估系統的動態特性并進行補償,減少超調量和加速調節過程[3]。由于該方案是基于精確數學模型而設計的,對模型參數變化適應能力差,而實際生產過程中,往往無法獲得精確的數學模型,在一定程度上限制Smith預估控制器的應用范圍。在PID控制算法優化研究方面,文獻[4]用模糊控制器作為系統控制器,利用模糊控制良好的魯棒性,提高控制系統的性能。雖然模糊控制無需精確的數學模型,抗干擾能力強,魯棒性良好,但是它主要依靠操作人員的工作經驗和直觀判斷,導致模糊控制的精度不高。為了提高系統控制的精度,將PID控制器與模糊控制相結合的模糊PID復合控制器在實際生產中得到應用[5]。然而在具有滯后特性的控制系統中,模糊PID復合控制算法在模糊切換時控制系統的穩定性無法得到保障[6-7]。文獻[8]將模糊PID自適應控制器當作系統控制器,在線自適應調整系統參數,改善了模糊切換導致的不穩定狀況,但是一旦模型失配,仍然難以取得理想的控制效果。與此同時,Smith預估器的優化研究也在不斷地進行,文獻[9]將Smith預估控制與神經網絡相結合構造了一種補償Smith-RBF神經網絡控制策略,利用RBF神經網絡進行實時參數調整,增強了系統的抗干擾能力。文獻[10]將自適應思想與Smith預估器相結合,實現大時延和環境參數未知情況下的有效控制。文獻[11]對Smith預估模型參數實現了多目標優化,有效地克服了系統的非線性。
本文針對實際生成過程中常規PID-Smith控制器在滯后時間多變的環境下存在著超調量大、穩定性弱等缺點,提出一種改進型模糊自適應Smith預估控制器,實驗結果表明該方案在一定程度上減少了被控對象因系統時間滯后帶來負面影響。
1 常規Smith預估控制器
針對滯后系統中閉環特征方程含有純滯后項的問題,史密斯提出一種預估補償控制的方法,在反饋控制基礎上,引入一個預估補償環節,使閉環特征方程不含純滯后項。通過預估被控模型的動態特征,利用預估模型進行時滯補償,形成一個沒有時間滯后的被控模型,具體結構如圖1所示。

圖1 常規Smith預估器的基本結構
圖中Gm(s)為預估模型無滯后的部分,exp(-Lms)為預估模型純滯后的部分,兩者的結合Gm(s)exp(-Lms)為Smith預估模型的傳遞函數,Gp(s)exp(-Ls)為實際被控模型的傳遞函數,系統控制器Gc(s)為PID控制器。當模型精確時,即Gm(s)=Gc(s),Lm=L,得到的閉環系統傳遞函數為:
(1)
其特征方程為
1+Gc(s)Gp(s)=0
(2)
從(2)式中可看出,在實際被控對象與預估模型完全一致的前提下,通過Smith預估補償作用,閉環系統的特征方程式中的純滯后項被消除了,只是它的輸出滯后了一個L的時間。但是在絕大部分具有滯后特性的控制系統中,實際被控模型的參數通常受到外界影響,具有時變性、不確定性。當實際被控對象與預估模型有誤差時,則有
(3)
由(3)式可知,實際被控對象和預估模型的誤差越大,即Gp(s)與Gm(s)以及L與Lm相差越大,補償效果就越差。因為純滯后為指數形式,所以純滯后的誤差比Gm(s)的誤差影響大,即Lm的精度更關鍵。
2 改進型預估控制算法的設計
2.1 模糊自適應PID控制
模糊自適應PID控制的系統結構主要是由PID控制調節器和模糊推理機兩部分構成,其具體結構如圖2所示。模糊自適應PID控制器以誤差e以及誤差的變化率ec作為模糊控制器的輸入信號,PID控制器的參數kp、ki、kd作為輸出信號。模糊控制規則的作用下對PID控制器參數實時修正,滿足不同時刻的e以及ec對PID參數自整定的需求。輸出變量的值為kp、ki、kd的原始值分別加上控制參數的增量Δkp、Δki、Δkd,計算方法如下:
(4)
(5)
(6)

圖2 模糊自適應PID控制器結構圖
在模糊自適應PID控制器中,模糊推理機的輸入變量為e和ec,Δkp、Δki、Δkd作為模糊推理機的輸出。取e、ec、Δkp、Δki、Δkd的基本論域分別為[-10,10]、[-1,1]、[-3,3]、[-0.03,0.03]、[-0.03,0.03],并將誤差e和誤差的變化率ec以及輸出量Δkp、Δki、Δkd的模糊子集均定義為{負大、負中、負小、零、正小、正中、正大},且簡記為{NB、NM、NS、ZO、PS、PM、PB},同時量化到[-3,3]的區域內。由于三角形的隸屬函數具有靈敏度高的優點,因此本文模糊自適應PID控制器中的輸入輸出變量均用三角形函數作為模糊子集的隸屬度函數。根據實際控制經驗,在具有時滯特性的控制系統中,在不同誤差和誤差變化率自動調整下,模糊自適應PID的控制參數的變化符合以下3條規律[14]:
①當誤差e偏大時,取偏大的kp和偏小的kd,為了減小系統超調量,取ki=0;
②當誤差e和誤差的變化率ec處于中等大小時,取偏小的kp,取適中的ki和kd;
③當誤差e偏小時,kp和ki取偏大值,kd取適中值,為了抑制系統大幅度振蕩,誤差的變化率ec偏小時,kd取偏大值;反之,kd取較小值。
根據以上規律建立模糊規則表,見表1-表3。
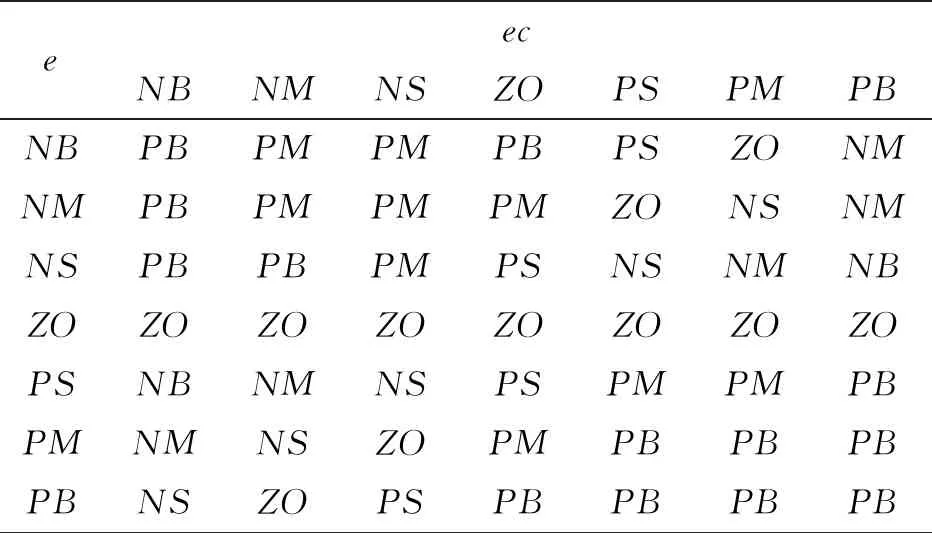
表1 Δkp的模糊規則表
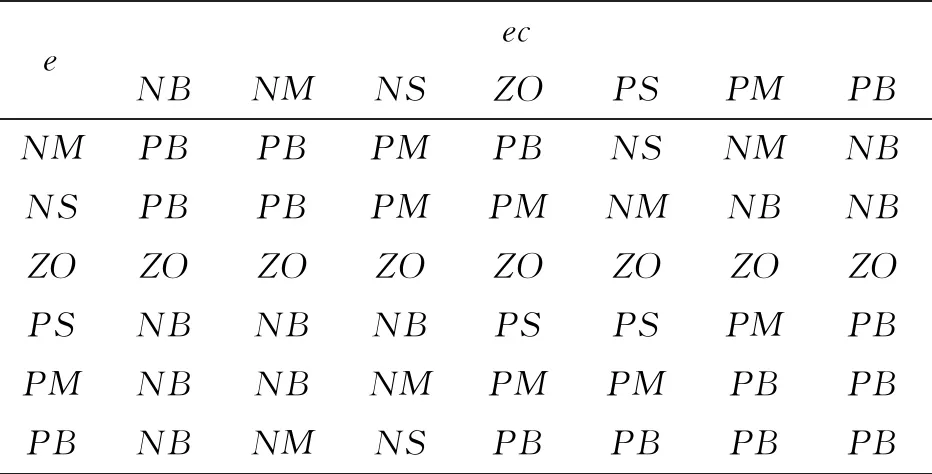
表2 Δki的模糊規則表
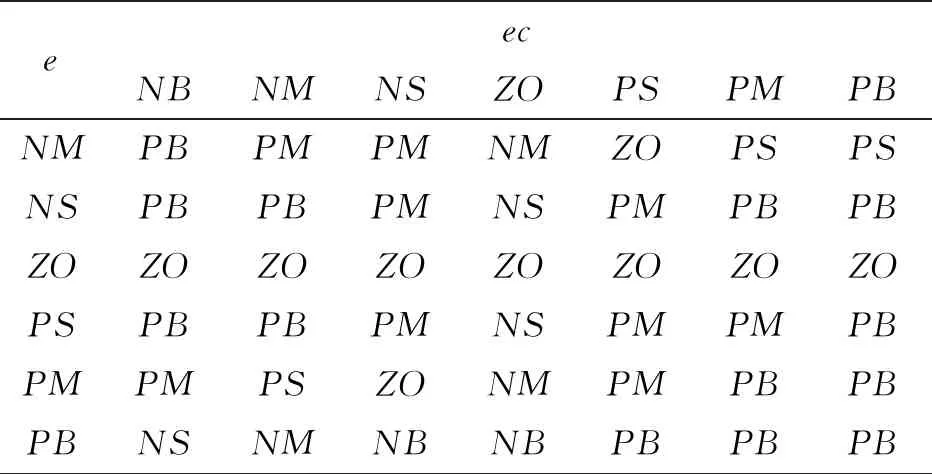
表3 Δkd的模糊規則表
2.2 模糊自適應PID-Smith預估控制器
由于Smith預估器都是基于精確數學模型而設計的,對模型的變化敏感,滯后時間變化更關鍵。
本文提出一種改進型模糊自適應PID-Smith控制器,其基本結構如圖3所示。

圖3 改進型模糊自適應PID-Smith的基本結構
在圖3中,R(s)為系統控制輸入,Y(s)為系統控制輸出,Gp(s)為實際被控模型的無時滯部分,exp(-Ls)為實際被控模型的純時滯部分。Gm(s)為預估模型無時滯部分,exp(-Lms)為預估模型的純時滯部分,一階濾波器與Gm(s)的參數保持一致。改進型控制算法采用模糊自適應PID控制器作為系統控制器,并在常規Smith預估器時滯環節前引入了一個內反饋環和一個一階濾波器,降低系統對滯后時間失配的敏感度。
3 仿真實驗
生產過程中典型的滯后系統可以簡化成一個滯后環節和一個慣性環節相串連的形式,其傳遞函數一般可描述為:
G(s)=K·exp(-Ls)/(Ts+1)
(7)
式中,K為對象模型的開環增益;T為時間常數;L為滯后時間;s為復變量。設定目標值為100,PID參數取kp=1.8、ki=0.05、kd=0.2。以被控對象G(s)=e-30s/(60s+1)。由于L/T=0.5,故可視為大滯后系統。當預估模型的滯后時間Lm=30保持不變,實際被控模型的滯后時間L分別為30、40、50、60時,并在1500~2000秒的時候施加25~30的動態干擾信號,將常規Smith預估方案與改進方案進行仿真對比實驗,實驗結果如圖4-圖7所示。
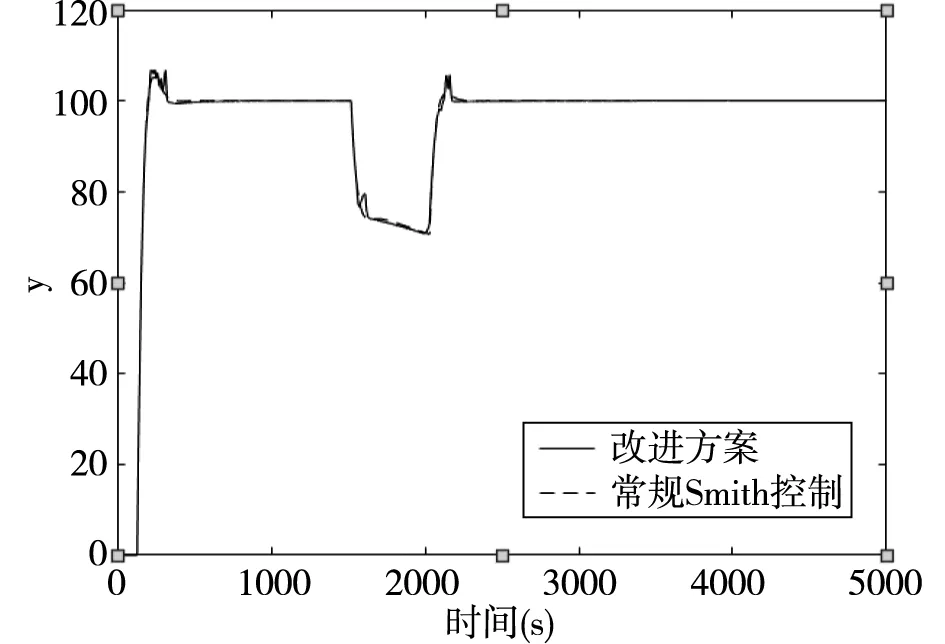
圖4 被控模型滯后時間L為30的仿真對比圖
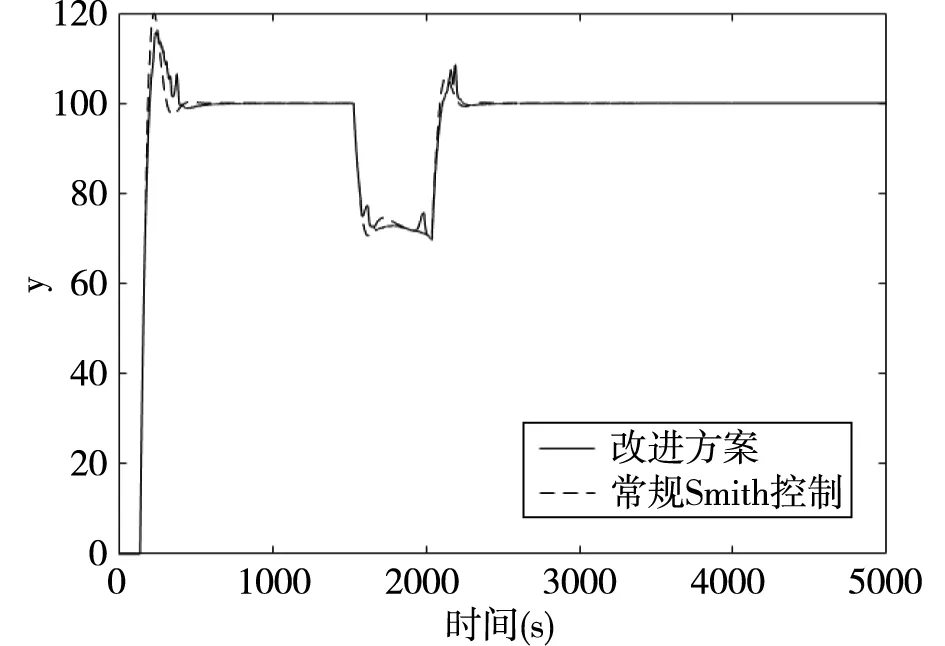
圖5 被控模型滯后時間L為40的仿真對比圖
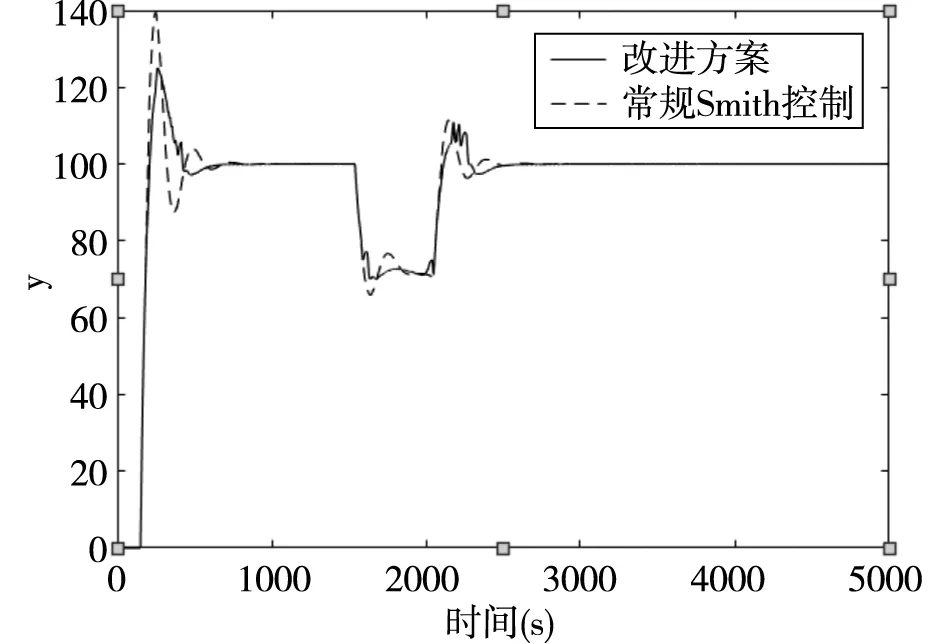
圖6 被控模型滯后時間L為50的仿真對比圖
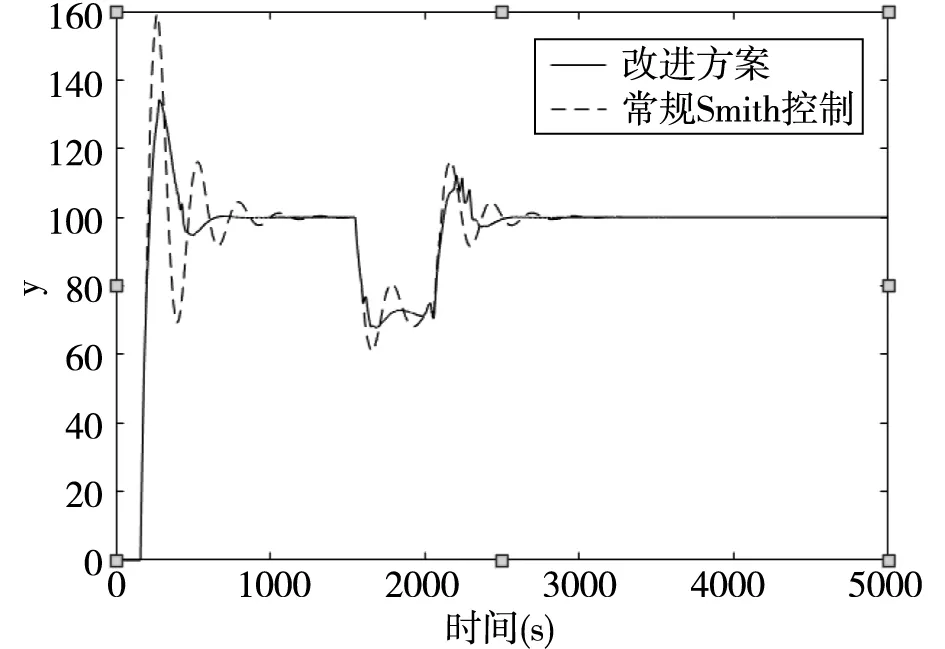
圖7 被控模型滯后時間L為60的仿真對比圖
通過對圖4-圖7的分析,得到的仿真實驗結果如表4所示。
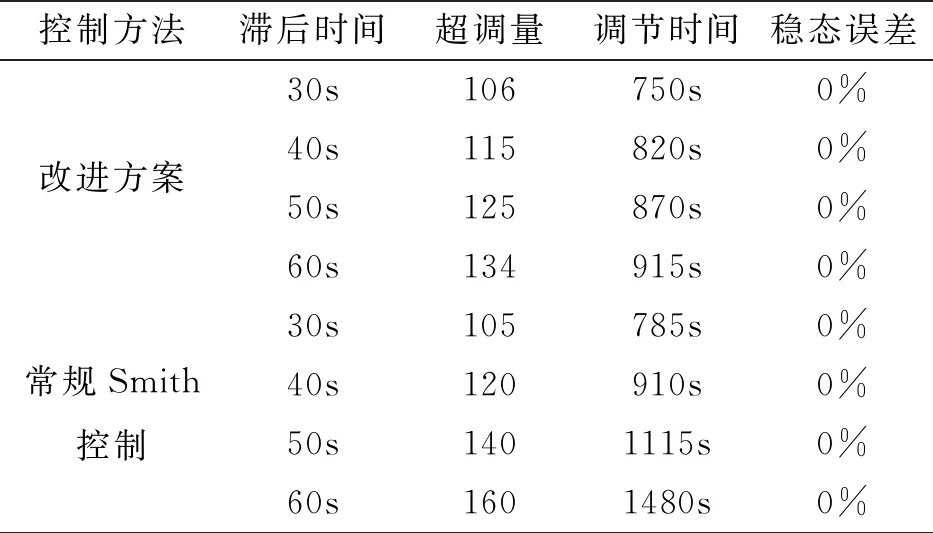
表4 仿真實驗關鍵數據對比表
仿真對比實驗表明:在模型精確的時候,即預估模型和被控模型的滯后時間均為30時,改進方案與常規Smith控制仿真曲線基本一致;隨著被控模型的滯后時間增大為40、50、60時,改進方案受影響較小,在一定程度上減小了系統振蕩范圍,改善了系統超調量。
結語
本文在研究具有滯后特性的控制系統時,針對常規Smith預估控制器對精確模型的依賴性問題,結合自適應控制和模糊控制理論,提出一種新型的模糊自適應PID-Smith預估控制方案。仿真結果表明:在滯后時間波動的情況下,該方案在一定程度上改善了滯后系統中控制不穩定和超調量大的問題,取得了良好的控制效果,具有一定的實用性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19