基于MCU的智能分揀機器人
2021-04-12 01:44:04西北民族大學(xué)電氣工程學(xué)院張峻瑞
電子世界 2021年5期
西北民族大學(xué)電氣工程學(xué)院 唐 媛 馬 喆 張峻瑞 向 宇 金 梅
傳統(tǒng)機器人分揀存在笨重、系統(tǒng)穩(wěn)定性較差、精度較低等缺點。本項目針對這些問題進行技術(shù)改良,設(shè)計的智能分揀機器人以STM32微控芯片作為控制器,機器人利用攝像頭進行物品二維碼掃描得到相關(guān)物品信息后,機器人使用機械臂對物品進行抓取,再進行巡線將物品送到相應(yīng)區(qū)域。這樣保證了整個分揀過程的方便性、準(zhǔn)確性與安全性,因此也降低了人工分揀疲勞所帶來的錯誤率,提高工作效率。
隨著社會經(jīng)濟的快速發(fā)展和人們生活水平的提高,已經(jīng)有越來越多的人開始在網(wǎng)上購物,這極大地促進了快遞等物流行業(yè)的發(fā)展。快遞物流業(yè)作為國民經(jīng)濟發(fā)展的戰(zhàn)略性、基礎(chǔ)性、先導(dǎo)性產(chǎn)業(yè)是連接供給側(cè)和消費側(cè)的現(xiàn)代服務(wù)業(yè)的重要組成部分。特別是在像“雙十一”這樣的大型網(wǎng)購活動時,大量包裹需要在一段時間內(nèi)快速分揀、運送。
目前,物流企業(yè)普遍采用人工分揀的方式對收到的貨物進行分揀,而這種分揀方式存在著諸多的問題,比如基層工人負擔(dān)大、分揀效率低等;有些物流公司也采用機器人分揀,但傳統(tǒng)機器人分揀存在笨重、系統(tǒng)穩(wěn)定性較差、精度較低等缺點。為了解決這些問題,本項目設(shè)計的智能分揀機器人便應(yīng)運而生。經(jīng)過對傳統(tǒng)機器人分揀技術(shù)改良后,智能分揀機器人能很好地滿足企業(yè)生產(chǎn)需求,通過智能分揀機器人的幫助可大大提高工作效率、降低勞動成本。
1 系統(tǒng)總體設(shè)計
本項目中使用STM32微控制器對整個機器人進行控制,在項目中使用到的功能有IO口復(fù)用、PWM波的輸出、串口通訊、定時器中斷、外部中斷、定時器等。本次硬件識別模塊采用二維碼掃描傳感器識別技術(shù),通過掃描傳感器對貨物二維碼進行掃描獲取相關(guān)貨物信息。電機驅(qū)動部分主要是直流電機,直流電機負責(zé)輪子的轉(zhuǎn)動,其起動和調(diào)速性能好。機械臂采用六個舵機和爪子組成,舵機由PWM波控制占空比來進行控制。CCD模塊進行圖像采集,圖像數(shù)據(jù)反饋給STM32進行處理,最后通過MCU統(tǒng)一控制進行調(diào)配。
2 主要硬件設(shè)計
本項目設(shè)計的智能分揀機器人,其硬件系統(tǒng)設(shè)計流程圖如圖1所示。
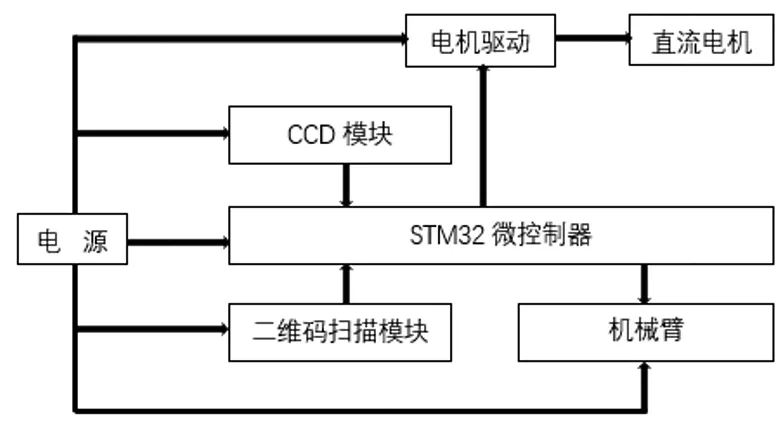
圖1 硬件系統(tǒng)設(shè)計流程圖
智能分揀機器人主要包含識別模塊、核心主板、運輸模塊、機械結(jié)構(gòu)這4個模塊,下面分別詳述。
2.1 識別模塊
識別模塊主要運用攝像頭識別二維碼。該模塊采用CMOS感光器件和專用鏡頭模組,支持全方向識讀智能鎖定目標(biāo)從而快速、超強的識讀二維/一維條碼,其可以將二維碼圖像通過感光頭讀取、識別并解讀二維碼圖像信息,實現(xiàn)信息的解碼和采集。其可以實現(xiàn)使智能分揀機器人識別標(biāo)簽包含的貨物運輸信息,進而將貨物運送到相應(yīng)區(qū)域。
2.2 核心板模塊
使用STM32系列芯片作為核心主板,STM32系列是專為要求高性能、低成本、低功耗的嵌入式應(yīng)用設(shè)計的ARM Cortex-M3,STM32的核心Cortex-M3處理器是一個標(biāo)準(zhǔn)化的微控制器結(jié)構(gòu),而Cortex-M3系列處理器的開發(fā)應(yīng)用可以全部在C語言環(huán)境中完成。此模塊可以對不同的類型的信息進行處理結(jié)合,其是智能分揀機器人的大腦和判斷機構(gòu)。
2.3 運輸模塊
利用CCD模塊實現(xiàn)機器人的巡線運輸?shù)墓δ埽撃K可以實現(xiàn)圖像的自掃描,從而將照射在CCD上的光學(xué)圖像轉(zhuǎn)換成電信號圖像,直接顯示圖像全貌。本項目中的機器人就是利用CCD模塊對路面進行圖像采集,并將采集到的數(shù)據(jù)反饋給主控芯片進行數(shù)據(jù)處理,之后,機器人聽從核心板的控制對識別出身份的貨物進行傳送和送達指定的位置。
2.4 機械結(jié)構(gòu)
本設(shè)計采用具有六自由度的機械臂來完成對貨物的裝卸。該機械臂由6個舵機組成,實現(xiàn)機械臂的六自由度運動,機械手采用主從控制方式,其開發(fā)可基于STM32單片機的編寫程序,因此可以通過串口與STM32單片機串行通訊,從而達到連續(xù)動作對貨物進行裝卸的目的。
智能分揀機器人在電源打開后,經(jīng)過穩(wěn)壓模塊后給主控芯片STM32微控器、二維碼掃描模塊、CCD圖像采集模塊、電機驅(qū)動、機械臂模塊進行供電。首先二維碼掃描模塊對物品的二維碼進行掃描,獲取信息后反饋給主控芯片,之后主控芯片調(diào)動機械臂進行貨品抓取,之后機器人根據(jù)CCD模塊采集到的圖像數(shù)據(jù)傳送給主控芯片進行數(shù)據(jù)處理,處理后調(diào)控電機驅(qū)動,從而調(diào)控了直流電機的運動,進而進入循跡狀態(tài)。
3 主要軟件設(shè)計
在本項目中,使用C語言來編寫程序,使用的編譯器為Keil5。Keil編譯器完美的支持使用C語言對STM32系列芯片的驅(qū)動,該編譯器功能非常強大,支持在線仿真功能,可以通過觀察窗看到每一個寄存器的值,可以更加直觀的看到程序設(shè)計時出現(xiàn)的錯誤并及時改正,對于程序的調(diào)試非常有幫助。程序編寫時使用模塊化編程,把不同模塊的初始化及驅(qū)動過程封裝在不同的.c文件中,在main.c文件中只實現(xiàn)調(diào)用的過程,不同文件中函數(shù)的調(diào)用通過對相應(yīng).h文件的引用來實現(xiàn)。模塊化編程最大的好處就是程序的可閱讀力比較強,編程思路的體現(xiàn)更加清晰,對于程序的分模塊調(diào)試以及程序修改也非常方便。
智能分揀機器人在開始程序啟動后,完成各模塊的初始化。區(qū)定位功能等,直到機器人達到預(yù)期效果。
首先將小車放置在取貨點,打開電源開關(guān),機器人進行二維碼掃描和抓取貨物,獲取信息后,小車根據(jù)得到的信息進行搬運貨物至相應(yīng)區(qū)域,之后再返回取貨點,如此來回。
試驗結(jié)果表明,本智能分揀機器人能對正確的物品二維碼信息進行處理、物品的裝卸動作較為流暢、送達指定分區(qū)功能較為完善。因此,本智能分揀機器人具有一定的實用性、方便性、準(zhǔn)確性與安全性,其降低了人工分揀疲勞所帶來的錯誤率,提高了工作效率。
總結(jié)與展望:根據(jù)市場需求,本智能分揀機器人選取STM32微控芯片作為主控芯片對整體系統(tǒng)進行控制。相較于人工分揀貨物來說,本智能分揀機器人的工作效率更高、工作時間更加持久、工作費用更加低廉;相較于傳統(tǒng)分揀裝置來說,本智能分揀機器人擁有更良好的穩(wěn)定性、更便捷的操作性、更高的精確性。本機器人通過攝像頭掃碼,識別出二維碼中分揀目的地和路線等信息,從而使貨物快速高效地分揀、裝卸,節(jié)省了大量的人工。本設(shè)計采用無線模塊傳輸數(shù)據(jù),數(shù)據(jù)傳輸信息完整,降低信息丟失機率,降低了貨物丟失的機率。結(jié)合搬運條件的各方面來說,在降低成本的同時,提高了工作的效率。
本項目以物流分揀為基礎(chǔ),聯(lián)想到智能分揀機器人,但其本身的應(yīng)用層面更廣,不僅局限在單純的物流分揀之中,首先,對物品的二維碼掃描。其次,機器人判斷其是否為正確的二維碼。若是正確的二維碼則機械臂進行貨物夾取;若不是正確二維碼,機器人移除該物品,繼續(xù)檢測下一貨物的二維碼信息。之后,機器人將物品送達指定位置。后再返回取貨點,如此反復(fù)作業(yè)。具體操作流程圖如圖2所示。
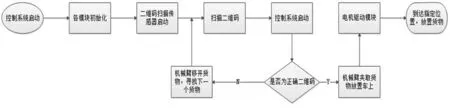
圖2 軟件流程圖
4 實驗結(jié)果
本項目完成后,在模擬的貨物分揀情境中不斷調(diào)試智能分揀機器人對貨物二維碼的識別功能、貨物裝卸的動作功能、送到指定分更是可以應(yīng)用到家禽、化工、礦石等領(lǐng)域,應(yīng)用于食品行業(yè)、醫(yī)療行業(yè)、化妝品的生產(chǎn)線等之中。
猜你喜歡
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中華手工(2017年2期)2017-06-06 23:00:31
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
中外會展(2014年4期)2014-11-27 07:46:46