一種基于自適應卡爾曼濾波的ADS-B點跡跟蹤處理方法
2021-04-12 01:44:20四川九洲空管科技有限責任公司杜世勇
電子世界 2021年5期
四川九洲空管科技有限責任公司 杜世勇 李 樞 唐 川
廣播式自動相關監視技術(ADS-B),是基于衛星定位數據,通過地空、空空數據鏈通信對外廣播本機狀態信息,并接收其他飛機信息的空管監視技術。針對密集飛行的點跡跟蹤處理問題,建立了基于ADS-B監視的密集飛行模型,采用了一種基于“當前”統計模型的自適應卡爾曼濾波算法進行點跡數據處理。仿真結果表明:自適應卡爾曼濾波算法在收斂速度和跟蹤精度方面優于常規卡爾曼濾波算法,適合密集飛行目標的近距離跟蹤。
ADS-B監視技術具有信息多樣、數據精度高、抗干擾能力強等優點,相對于一、二次監視雷達,其無需主動發射探測或詢問信號,僅通過偵聽空域中的ADS-B廣播信號,既可完成監視和跟蹤。本文基于密集飛行特點,建立了基于ADS-B監視的密集飛行模型,采用了一種基于“當前”統計模型的自適應卡爾曼濾波算法進行點跡處理并進行算法仿真,仿真結果表明該算法能快速收斂并且能有效提升目標飛機跟蹤的精度,滿足對目標飛機進行實時、高精度跟蹤的要求,具有良好的工程適用性。
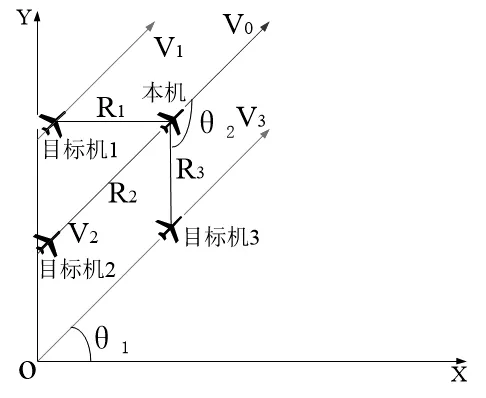
圖1 密集飛行場景示意圖
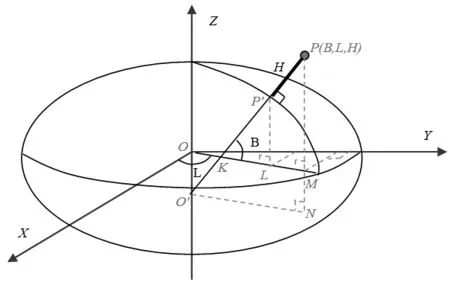
圖2 WGS-84大地坐標系與空間直角坐標系的轉換
1 基于ADS-B監視的飛行模型
密集飛行場景示意圖如圖1所示。V0為本機速度矢量,V1~V3為目標飛機速度矢量,R1~R3為目標機和本機的間距,θ1為目標機3的航向角,θ2為目標機3相對于本機所處的方位角。
由于ADS-B消息提供的目標機三維位置數據采用WGS-84大地坐標系,即經度、緯度、高度,而機載監視設備對目標飛機的跟蹤采用的是空間直角坐標系,因此,在對目標機航跡進行處理之前首先需要將目標機的大地坐標轉換為空間直角坐標,轉換關系如圖2所示。
若目標機的WGS-84大地坐標為P(B,L,H),將其分別投影到直角坐標系中,得到空間直角坐標(X,Y,Z),轉換關系如下:
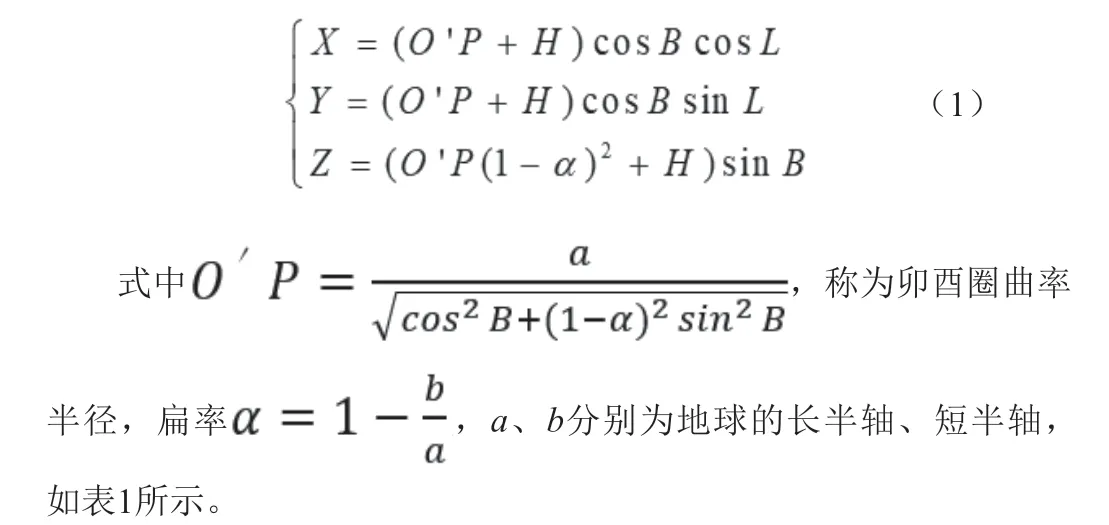

表1 WGS-84的2個基本常數
2 基于“當前”統計模型的自適應卡爾曼濾波算法
跟蹤機動目標較為有效的單模型方法是“當前”統計模型。“當前統計”模型算法的基本思想是,當目標當前時刻正以某一加速度機動時,它下一瞬時的加速度取值范圍是有限的,而且處于“當前”加速度領域內。“當前”統計模型,即機動加速度的非零均值時間相關模型,其概率密度由修正瑞利分布來描述,利用瑞利分布隨均值而變化,方差由均值決定的特點,令加速度均值等于當前時刻的加速度預測值,實現了均值和方差自適應濾波。自適應卡爾曼濾波方程如下:

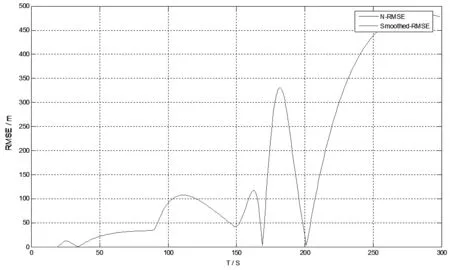
圖3 采用常規卡爾曼濾波算法仿真

圖4 采用自適應卡爾曼濾波算法仿真
其中,(2)為一步預測估計值方程,(3)為一步預測誤差協方差方程,(4)為卡爾曼增益,(5)為最優估計值方程,(6)為最優濾波誤差協方差方程。
經常參加體育鍛煉可以培養與人合作的個性和堅忍不拔的健康人格,群體活動能夠增加人與人之間的交往,消除孤獨感,并使心情愉悅,獲得滿足。
狀態轉移矩陣:

結論:本文在ADS-B監視技術的基礎上,針對密集飛行的高精度、實時性跟蹤問題,建立了密集飛行的數學模型,并選用了一種基于“當前”統計模型的自適應卡爾曼濾波算法進行點跡處理。仿真結果表明,在跟蹤機動飛行目標的問題上自適應卡爾曼濾波算法具有收斂速度快、濾波精度高的優點,跟蹤性能優于常規卡爾曼濾波,滿足密集飛行時對目標飛機的跟蹤要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
電源技術(2016年9期)2016-02-27 09:05:39