油麥混編景觀種子帶編織機研制
2021-04-15 09:54:30黃小毛蘭朝偉馬麗娜趙子昂
農業工程學報 2021年3期
黃小毛,蘭朝偉,馬麗娜,朱 恒,趙子昂
(1. 華中農業大學工學院,武漢 430070; 2. 農業農村部長江中下游現代農業裝備重點實驗室,武漢 430070)
0 引 言
隨著人民生活水平的不斷提高和鄉村振興戰略及美麗新農村建設活動的推進實施,創意景觀農業有了很大的發展。人們希望農田里的作物不僅能夠豐產增收,而且在生長期能夠呈現出某種視覺景觀效果,達到美化環境、廣告宣傳的目的。如旅游景點的油菜花海、稻田景觀等,帶來了很好的經濟效益和社會效益,成為第一、三產業融合發展的典型案例。
有別于以獲得農產品為主要目的傳統農業生產行為,創意農業是一種以增加農業附加值為主要目的、以農作物景觀造型為主要手段、以氛圍營造與廣告宣傳和農耕文化及農事體驗為主,同時兼顧農產品生產的新型農業生產行為。作為一種主要專注于農業景觀開發與利用的新型農業種植模式[1-3],創意景觀農業不僅有農業生產價值,更包含生態價值、體驗價值、教育價值、觀賞價值等,其要義涵蓋經濟學與價值特性,是農業現代化的重要標志和實現途徑之一[4-5],可在自然村落、農業旅游景點等場景進行推廣。
事實上,大田創意景觀農業由來已久,從“麥田怪圈”到“稻田藝術畫”,從“彩虹花田”、“夢幻花田”到“油菜花海”,受到越來越多的關注。但是目前的景觀圖案造型實施過程中,因圖案邊界有著嚴格的精度要求且存在不同類別或品種作物混合種植的情形,現有種植機械很難實現,純人工進行田間造型設計與播種或移栽作業。雖然可借助GPS等技術手段進行輔助定位,但仍費時費力且出錯率極高,很難進行大規模推廣。因此,有針對性地研發相應的機械化景觀造型技術具有重要意義。鑒于此,本文提出一種基于混編種子帶直播技術的景觀作物種植方法,并以油菜、小麥混合造型種植為例,研制一種油麥混編景觀種子帶編織機,以期為油菜與小麥大田景觀圖案的造型實施提供一種新的思路和解決方案。
1 混編景觀種子帶景觀造型基本原理
種繩直播技術起源于韓國和日本,廣泛應用于胡蘿卜、娃娃菜等蔬菜作物的種植,也有水稻直播和小區育種播種方面的嘗試[6-7]。不同于傳統單一品種種子的均勻化排布,本文提出的混編景觀種子帶通過信息化、自動化手段將不同作物或品種(或留白)的種子分布于種子帶的不同位置,利用不同位置作物出苗后的顏色、高度等差異體現景觀圖案。
首先,根據作物的種植行距和株距確定田間實際圖案的分辨率,即田間圖案的最小柵格大小;然后設計目標圖案,并根據像素數量與地塊尺寸的匹配關系,設置數字圖案的柵格大小,對目標圖案進行柵格化處理,按照圖案上各區域代表的不同設計意圖和含義(對應不同顏色),對不同區域的柵格進行數字化編碼;之后,自上而下、自左至右,依次讀取數字圖案柵格的編碼,步進移動紙帶,通過排種系統排布對應作物的種子,采用繞繩編織方式固定種子,形成種子帶;最后,在田間按照相反順序將混編的種子帶定植埋入土壤中。
油菜和小麥都是越冬作物,油菜開花期的黃色與小麥的綠色可形成較好的視覺景觀效果。本文以油麥混編種植為例,以正方形內嵌套五角星為目標圖案,對目標圖案進行柵格化和數字化編碼處理,以柵格規格為15 ×15 個為例,則總的編碼數為225個,五角形外部區域與內部區域分別布置油菜與小麥種子,具體結果如圖1所示。景觀種子帶編織時,自上而下、自左至右,機器依照A→B→C→D→E的順序進行混編種子帶編織作業,如圖2a所示,直至編織完成;景觀種子帶種植時,則反向依照a→b→c→d→e的順序埋入土壤中,直至種植完成,如圖2b所示。
2 混編景觀種子帶編織機總體結構與工作原理
2.1 總體結構方案
根據作物種植景觀造型原理,混編景觀種子帶編織機的任務是將油菜和小麥種子規律化排布到種子帶不同位置,纏繞固定后形成一條完整的種繩。總體設計思路是基于傳統種子帶編織技術[7-12],保留走紙系統,實現紙帶預裝、紙帶輸送、紙帶折疊變形、棉線纏繞和種繩收卷等基本功能,對排種系統進行改進,設計2套針對油菜和小麥種子特性的氣吸式排種器及導種管,增加噴墨標記裝置,重新設計控制系統,改變走紙及排種器控制方式。不含棉線纏繞裝置、計米器及往復擺桿的種子帶編織機總體結構方案如圖3所示。
為確保圖案效果,每一粒種子相對于紙帶的位置都非常重要,尤其是圖案邊界處的種子位置至關重要。本文采用步進電機驅動排種器、紙帶及種繩運動,對編織長度用計米器(由編碼器和轉輪組合而成的一種長度傳感器)精確計數,通過程序自動控制系統各部分協調動作。
根據農藝要求、種子特性及景觀圖案的精度要求,擬定油麥混編種子帶編織機主要技術參數如表1。
2.2 整機結構
油麥混編景觀種子帶編織機主要由走紙系統、排種系統和噴墨標記裝置3部分組成,具體包括紙帶盤、風機、紙帶固定板、氣吸式油菜排種器、氣吸式小麥排種器、標記槍、棉線纏繞裝置、計米器、往復擺桿、種繩輥、空壓機等,如圖4所示。
2.3 工作原理
機器啟動后,在程序指令控制下,種繩輥電機提供動力帶動紙帶運動,經過紙帶固定板時,紙帶由豎直向上運動變為水平運動,經過排種口時,在V型槽作用下折疊成特定角度的V形,承接排種器排出的作物種子。同時,單片機開始讀取目標圖案的數字信號,信號為1時控制油菜排種器排種;信號為0時控制小麥排種器排種。當單片機讀取到位于紙帶端點的數字信號,在控制排種器排種的同時,控制標記裝置對種子帶端點進行標記,為種子帶種植過程中換行提供參考;實際工作過程中,紙帶接種處無法同時進行端點標記,故對紙帶端點偏移一定距離,以方便延后標記處理。種子掉落到紙帶上后,紙帶受迫變形,將種子完全裹住并向前運動。當裹有種子的紙帶經過棉線纏繞裝置時,在紙帶表面按順時針與逆時針方向各纏繞一根棉線,固定種子位置并增加種繩強度。棉線纏繞完成后,紙帶繼續向前輸送,在經過計米器的轉輪時換向,并通過計米器的編碼器計算出已編織完成的種繩長度。換向后的種繩經過往復擺桿,均勻纏繞在種繩輥上,完成混編作業。
排種系統和走紙系統分時間隔運動。當排種器排種時,種繩輥電機、棉線纏繞裝置電機、往復擺桿電機等暫停運動,紙帶停止前進,待種子落到紙帶表面并穩定后,其他電機啟動,紙帶向前移動一個步長;當紙帶運動時,排種系統停止,2個系統交替循環。這種間歇的走紙方式,雖然犧牲了整機工作效率,但是相對于連續式走紙方式,一方面減少了因種子特性不一致而導致的投種通道中種子運動時間不一致和落種點位置差異,另一方面,走紙系統中加入了含編碼器的計米器實現了閉環控制,走紙精度提高,落種點位置更加精準。
3 關鍵部件設計
3.1 排種器
排種器是種子帶編織機的關鍵部件,排種精度會影響最終的景觀圖案效果。參考已有氣吸式排種器結構[13-17],本文設計的氣吸式排種器如圖5所示,主要由排種盤、端蓋、空心軸、支撐座、種盒、漏斗等組成。
編織機作業前,風機啟動,吸風口通過管道與空心軸連接,抽取排種盤內部空氣,形成負壓。編織機工作時,排種步進電機通過帶輪帶動端蓋轉動,進而帶動排種盤轉動。排種盤吸種孔經過種盒充種區時,吸附種子,再經過清種撥針時多余種子被撥除。排種盤轉動一定角度后,吸附的單粒種子被清種毛刷刮落至導種管入口,通過導種管后掉落在排種器下方的V型紙帶上,完成一次排種作業。
3.1.1 排種盤直徑確定
氣吸式排種器排種過程示意圖如圖6所示,排種盤直徑是氣吸式排種器的重要參數,決定了充種時間和效果[12]。一般情況下,充種時間越長,充種效果越好,排種器排種性能也越好;充種時間與排種盤直徑的關系為
式中t為充種時間,s;δ為充種區域弧度,rad;n為排種盤轉速,r/min。
由式(1)可知,在排種盤轉速恒定時,充種區域弧度越大,充種時長越長,充種效果越好。在排種器種盒容量一定的情況下,排種盤直徑越大,充種區域弧度δ越小,充種時長越短,充種效果越差。根據間歇式排種作業要求,排種盤轉速n為3~10 r/min,為保證排種盤有足夠的充種時長,綜合考慮排種器外形尺寸、質量,本文設計排種盤直徑D=10 cm,厚度為2.5 cm。
3.1.2 排種盤吸種孔形狀與數目
因油菜種子形狀接近球形,因此油菜排種器吸種孔形狀選擇為圓形。小麥種子形狀為橢球形,根據小麥種子三維尺寸數據[16],設計小麥吸種孔形狀為橢圓形。
排量不變情況下,排種盤吸種孔數目越多,排種盤轉速越低,吸種孔充種時間增加,排種性能越好。吸種孔個數由式(2)計算:
式中Y為吸種孔個數;v為紙帶速度,m/s;k為株距,m。
當紙帶速度與排種盤轉速一定時,吸種孔數目與株距成反比。根據油菜與小麥種植農藝要求及景觀作物播種特點,本文設置株距2.5~10 cm、走紙速度3.3 cm/s,由式(2)計算得到吸種孔數量為7~26。因吸種孔數量受排種盤半徑、粒距、吸孔尺寸及風機負壓的限制,綜合考慮,本文設計吸種孔數量為20。
3.2 導種管
種子帶編織機中2個排種器按需分時工作,為使排出的種子精準地掉落在同一落種點,保證落種效果,設計一種如圖7所示的專用導種裝置。油菜種子類球形,易滾動,為減小沿紙帶方向的滾動,使其以自由落體運動落入V型紙帶內,采用豎直導種管。小麥種子為橢球型,表面不光滑,不易滾動,因此采用帶有傾角的導種管;管道傾角β大于小麥種子滑動摩擦角[18],綜合考慮導種管實際工作效果,本文取β=35°。導種管橫截面為正方形,為防止種子堵塞,根據測得的小麥種子平均長徑尺寸,設計正方形邊長N=9 mm。根據整機布局與排種器安裝方式,設計導種管長度S1=15 cm,高H=11 cm。
3.3 V型槽
為更好地承接種子,通過V型槽結構將排種口下方紙帶的截面折成V字形,且紙帶緊貼V型槽內表面,如圖8所示。為使小麥種子順利落入V型槽內,V型槽口寬度T應大于小麥長徑DL,即:
根據試驗測得所用鄭麥9023號小麥種子的平均長徑DL為6.53 mm,紙帶寬度20 mm,槽壁10 mm,由式(3)計算出θ≥38.11°。
油菜種子掉落在紙帶上發生滾動時的受力如圖8所示,分析可知,重力G、單側滾動摩擦力f、單側支撐力F分別為
式中m為油菜種子質量,kg;g為重力加速度;μ為滾動摩擦系數;r為油菜種子半徑,mm。F1、F2為V型槽對油菜籽粒的支撐力,其值等于油菜籽粒對V型槽內表面的正壓力。
結合籽粒滾動過程中的能量守恒定律,有
由式(4)得到f并代入式(5)可得:
式中s為油菜種子滾動距離,m;v為油菜種子掉落在紙帶表面瞬時滾動速度,m/s。
由式(6)可知,r、v、μ為定值時,油菜種子滾動距離s與sin(θ/2)成正比,0°<θ<180°時,θ取值越小滾動距離越短。結合式(3),取θ=40°,并根據排種器布局與預試驗效果,確定V型槽長度Z1=5 cm。
3.4 標記裝置
傳統種子帶種植時對每行種繩的長度精確度要求較低,種植時人工估測換行即可。本文所設計的混編種子帶含有圖案信息,種植時對行長度精度要求高。故設計標記裝置對種子帶行端點轉折標記,為后續種植時換行提供參考。
本文采用無接觸噴墨方式,以最大限度降低因標記過程引起的編織精度誤差。標記裝置位于排種器裝置與棉線纏繞裝置之間,如圖9所示。選用WA-101型自動噴槍,工作壓力為0.4~0.8 MPa,可通過DM-2V025型氣動電磁閥控制氣流通斷,SST-600-10L型空壓機作為氣源。作業時,空壓機提供的正壓氣流一方面導入墨罐對墨水形成預壓力,另一方面經過氣動電磁閥進入到噴槍內部。當需要標記時,控制系統控制氣動電磁閥開啟,氣流導通后,氣壓驅動噴槍噴嘴霧化墨滴并對靶噴射。
4 控制系統設計
各運動部件之間需要精密協調動作,因此控制系統的作用至關重要。參考原有控制邏輯[19-22],重新設計整機工作流程,如圖10。
所設計的控制系統包括主控芯片、人機界面、多個電機驅動系統和標記裝置控制系統等。選用STM32F401單片機作為主控芯片,YSHM1SC1074觸摸屏為人機界面。排種系統(包括2個排種步進電機)與走紙系統(包括種繩輥、往復擺桿和棉線纏繞裝置3部分的驅動電機,同時啟動或停止)之間采用交替間歇作業方式,排種器、棉線纏繞裝置、往復擺桿、種繩輥均采用步進電機驅動。因種繩纏繞在種繩輥上,種繩輥實際有效直徑會越來越大,在驅動電機轉速保持不變時,紙帶線速度會逐漸變大。為確保每次紙帶走紙距離均勻性,本文從2方面對系統作出改進:一是增加往復擺桿裝置進行導向,使種繩纏繞時能夠均勻地分布在種繩輥長度方向上,同時減緩種繩輥實際有效工作直徑增速;二是利用計米器對紙帶的位移量進行測量,以對驅動種繩輥的步進電機進行閉環控制。標記裝置利用氣動電磁閥進行開關控制,噴槍開啟時長通過試驗確定,安裝位置根據編織株距與行距進行調整。
5 編織機性能試驗
以中雙9號油菜種子與鄭麥9023號小麥種子為試驗材料,分別開展排種性能試驗、走紙精度試驗、圖案編織試驗和種子帶田間定植試驗。
5.1 排種性能試驗
5.1.1 試驗指標
為測試排種器的排種性能,在JSP-12型排種性能試驗臺上進行排種性能試驗,如圖11所示。試驗參照標準GB/T 6973-2005《單粒(精密)播種機試驗方法》[23]進行,以合格率、漏播率和重播率作為排種性能評價指標。
5.1.2 正交試驗設計
通過理論分析、預試驗并參考相關文獻[16,24],確定影響氣吸式排種器排種性能的主要因素為氣流負壓、吸孔直徑和電機轉速。
油菜排種盤吸種孔為圓形,吸孔直徑d與種子外徑b的關系式[25]為d=(0.6~0.7)b。
取100粒中雙9號油菜種子,測得其平均粒徑為1.96 mm;取 吸 盤 型 孔 直 徑d1=0.6b,d2=0.65b,d3=0.7b。得到3組油菜排種盤吸孔直徑為1.2、1.3和1.4 mm。
小麥種子外形為橢圓形,主要尺寸為長徑與短徑。為保證小麥吸種孔被種子完全覆蓋,減小排種盤吸力損失,吸種孔選擇橢圓形型孔。現以其長徑和短徑為參考尺寸,取100粒鄭麥9023號小麥種子,測得平均長徑為6.53 mm,平均短徑為3.24 mm,確定3組小麥吸孔尺寸(長徑×短徑)為3.9 mm×1.9 mm、4.2 mm×2.1 mm、4.5 mm×2.3 mm。
為保證充種攜種性能,經預試驗確定電機轉速為3、6和9 r/min;氣流負壓為1 500、2 000和2 500 Pa。
試驗因素水平如表2所示。按照L9(34)正交表進行設計試驗,共9組,每組重復3次,結果取均值。

表2 排種性能試驗因素水平Table 2 Factors and levels of seeding performance test
5.1.3 試驗結果與分析
正交試驗方案與試驗結果如表3所示。為了確定各試驗因素對于試驗指標的影響,對各個試驗指標進行極差分析,如表4所示。

表3 排種性能試驗結果Table 3 Seeding performance test results
由表4可知,除影響油菜重播率指標的主次順序為B、A、C外,影響其他指標的主次順序均為A、B、C。不同指標對應的較優方案是不同的,現通過綜合平衡法對試驗結果進行分析。
油菜的合格率、重播率和漏播率的較優組合分別是A3B1C1、A1B1C3、A3B2C1,根據多數傾向原則考慮,綜合較優組合為A3B1C1,即氣流負壓2 500 Pa,吸孔直徑1.2 mm,電機轉速3 r/min。
對于小麥,合格率、重播率和漏播率的較優組合分別是A3B1C1、A1B3C2或A1B3C3、A3B1C1,根據多數傾向原則考慮,綜合較優組合為A3B1C1,即氣流負壓2 500 Pa,吸孔長徑3.9 mm、短徑1.9 mm,電機轉速3 r/min。
5.1.4 試驗驗證
為驗證較優參數組合下2種排種器的播種合格率、重播率和漏播率優化效果,進行試驗驗證,3次重復,取均值。試驗結果如表5所示,油菜的平均播種合格率94.1%、重播率1.8%、漏播率4.1%;小麥的平均播種合格率92.2%、重播率3.1%、漏播率4.7%;表明較優參數組合下2種排種器性能均較好,可滿足精量播種要求。
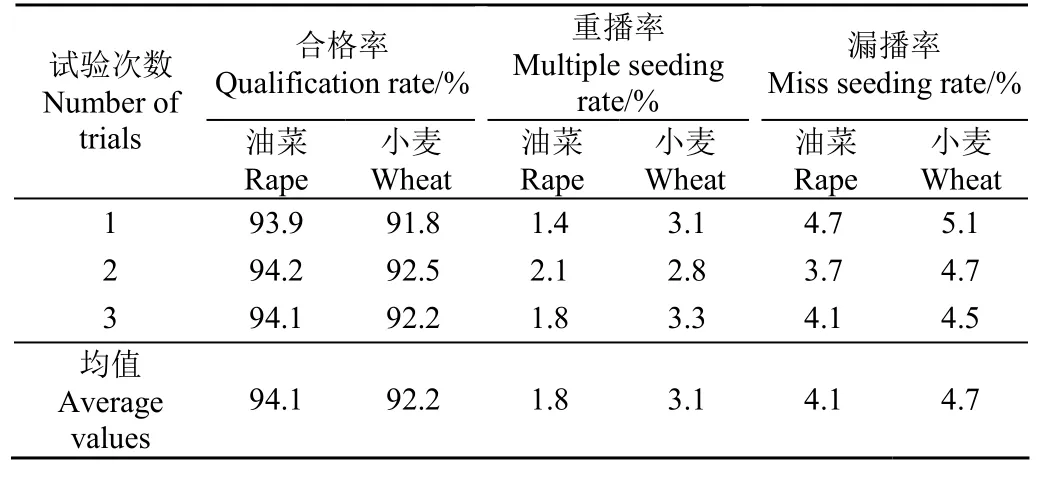
表5 排種性能驗證試驗結果Table 5 Seeding performance verification test results
5.2 走紙精度試驗
5.2.1 試驗指標
為了測試樣機的走紙均勻性,在編織機上進行走紙精度試驗,試驗參照GB/T 6973-2005《單粒(精密)播種機試驗方法》進行,以株距變異系數為評價指標。
5.2.2 正交試驗設計
目前國內對種子帶編織機的研究較少,根據預試驗,選取往復擺桿運動速度、紙帶走紙速度、理論株距為試驗因素,設計三因素三水平正交試驗。以寬度為2 cm的空白紙帶為試驗對象,每次走紙完畢后,標記裝置對落種點進行標記;兩標記點之間距離即為實際走紙距離。根據理論分析與預試驗確定往復擺桿運動速度為0.10、0.15、0.2 cm/s;紙帶走紙速度為1.7、2.5、3.3 cm/s;單次理論走紙距離為5、7、9 cm。每組試驗編織300個點,測量每2個標記點之間的實際株距,計算出株距變異系數。
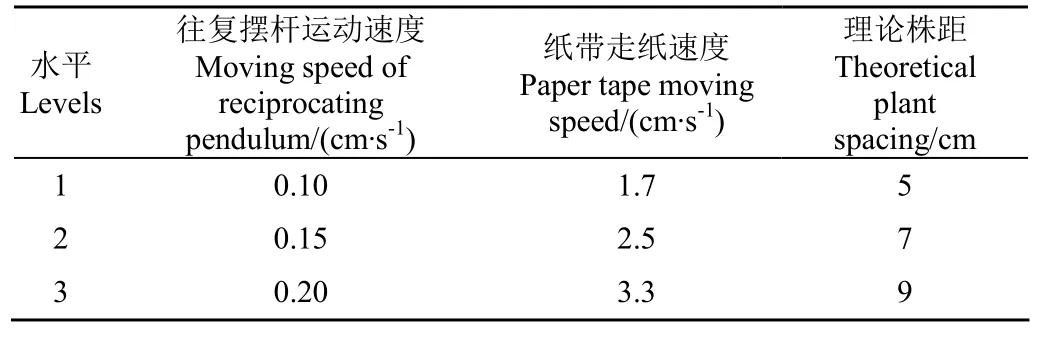
表6 走紙精度試驗因素水平Table 6 Factors and levels of paper tape feeding accuracy test
5.2.3 試驗結果與分析
正交試驗方案與試驗結果如表7所示。株距變異系數最高為5.10%,最低為2.71%;較優參數為往復擺桿運動速度0.10 cm/s,紙帶走紙速度1.7 cm/s,理論株距5 cm。
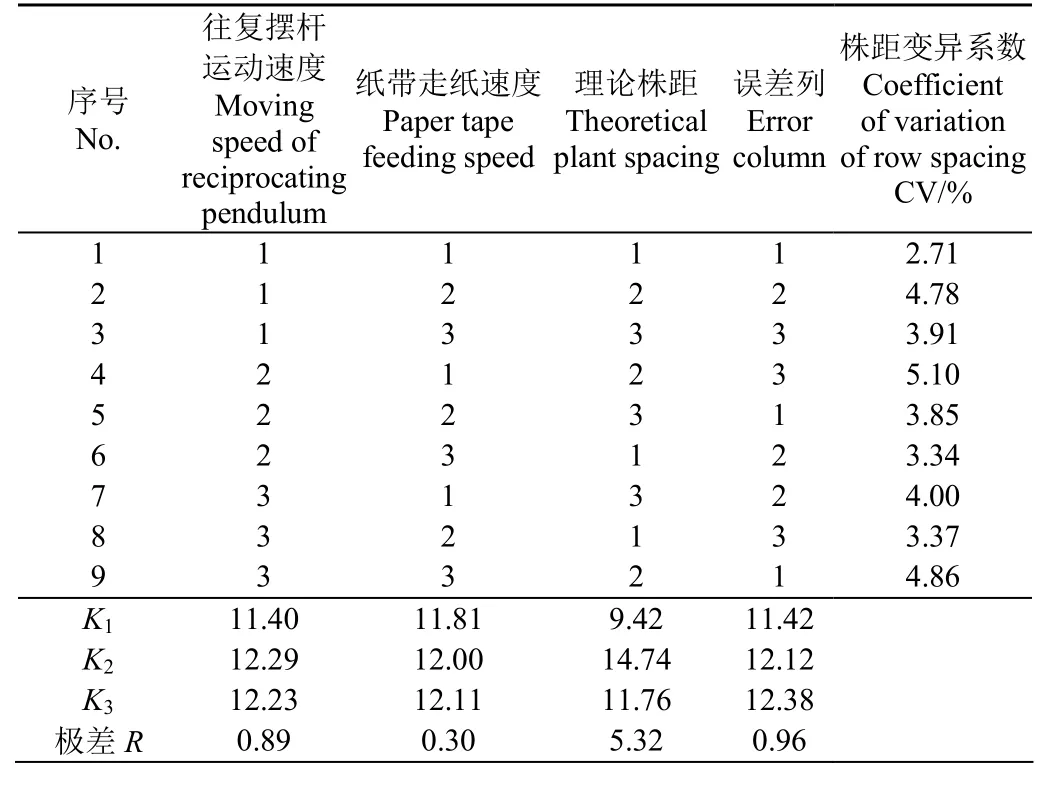
表7 走紙精度試驗結果Table 7 Wheat seeding experimental results
5.2.4 試驗驗證
根據正交試驗結果,開展驗證試驗,重復3次,實測株距變異系數分別為2.65%、2.74%、2.72%,均值為2.7%,表明種子帶編織機走紙均勻,可滿足播種要求。
5.3 圖案編織效果試驗
為了測試編織機對景觀圖案的編織性能,進行油菜與小麥混合編織試驗。
5.3.1 試驗條件
設定編織機往復擺桿運動速度為0.10 cm/s,紙帶走紙速度為1.7 cm/s,油菜排種器氣流負壓為2 500 Pa、吸孔直徑為1.2 mm、電機轉速為3 r/min,小麥排種器氣流負壓為2 500 Pa,吸孔長徑為3.9 mm、短徑為1.9 mm,電機轉速為3 r/min。以圖1圖案為編織圖案,試驗樣機如圖12所示。
設定理論株距為5 cm,行距為5 cm,分別編織10×10(每行10個點,共10行,總編織點數目為100,其他規格同理計算)、15×15、20×20、25×25和30×30個點的5組圖案,五角星內部區域編織小麥種子,五角星與正方形之間區域編織油菜種子。
5.3.2 評價指標
目前尚無農業景觀圖案播種效果評價的國家或行業標準,本文提出圖案相對位置變異系數與編織面積變異系數的概念。在目標圖案與編織完成后種子帶形成的圖案尺寸比例為1:1的條件下,選取正方形外邊界某一頂點為參考點(本文選取左下角點),分別測量目標圖案與實際編織圖案中五角星的5個頂點到參考點的距離,其值分別記為X1、X2、X3、X4、X5與x1、x2、x3、x4、x5。設定原始目標圖案的正方形面積為S1,其內部五角星面積為S2,編織完成后種子帶形成的正方形面積為M1,其內部五角星圖案面積為M2;令W1=S2/S1,W2=M2/M1。定義圖案相對位置變異系數P與編織面積變異系數Q的計算式分別為
分析可知,圖案相對位置變異系數P越小實際播種圖案位置精確度越高;編織面積變異系數Q越小,實際播種圖案的尺寸精度越高。
5.3.3 試驗結果與分析
編織完成后,按照第1節的播種方法,模擬田間種植過程,將成品種子帶用黑色膠帶粘結在白色背景紙表面,室內鋪展效果如圖13所示。
利用米尺測量關鍵點位,根據公式(8)和(9)計算各指標,結果如表8所示。可以看出,5種不同尺寸的測試圖案,圖案相對位置變異系數與編織面積變異系數均小于30%;圖案相對位置變異系數先減小后趨于穩定,最終穩定在17%左右;編織面積變異系數一般在10%以下。其中10×10圖案的2個變異系數均較大,分析原因,10×10的圖案僅包含100個編織點,對圖案邊界的離散誤差擬合較大,因此圖案變異系數較大。

表8 圖案編織效果試驗結果Table 8 Pattern weaving effect experimental results
圖案編織誤差主要來源于圖案處理階段與種子帶編織階段。采用柵格法處理目標圖案,在圖案不變的情況下,所取柵格數目越多,圖案編織效果越好,反之越差。經試驗得出,在編織點數大于225時,編織圖案效果較好且穩定。該誤差不可絕對消除,應盡可能編織柵格數目較多的圖案,以減少該誤差對最終圖案效果的影響。在種子帶編織階段,編織機每次走紙誤差值有波動,即每行紙帶累計誤差不同,導致行端點無法同圖2所示處于同一列,實際鋪展效果如圖14所示(鋪展至紙帶標記點即換行)。單次走紙誤差小于5 mm,對最終圖案效果影響較小,尤其是在作物株距行距較大的大規模種植中該誤差可忽略不計。
5.4 田間試驗
為進一步驗證發芽出苗效果,將5.3節試驗中30×30規格的種子帶人工定植埋入試驗田土壤中如圖14所示。定植15 d后對出苗后圖案的關鍵點位進行測量,計算得出圖案相對位置變異系數為18.26%,編織面積變異系數為10.87%。
6 結 論
本文提出并研制了一種用于景觀農業種植的油麥混編景觀種子帶編織機,降低了景觀農業種植的勞動強度與成本,為景觀農業機械化種植提供了新思路。
1)對氣吸式排種器關鍵結構與參數進行設計,排種盤直徑為10 cm;油菜和小麥排種器吸孔分別設計為圓形和橢圓形,數目為20個。在氣流負壓2 500 Pa,吸孔直徑1.2 mm,電機轉速3 r/min時,油菜氣吸式排種器播種合格率94.1%,重播率1.8%,漏播率4.1%;氣流負壓2 500 Pa,吸孔長徑3.9 mm、短徑1.9 mm,電機轉速3 r/min時,小麥氣吸式排種器播種合格率92.2%,重播率3.1%,漏播率4.7%。均滿足國家標準,且該參數可滿足機器工作要求。
2)走紙精度試驗中,隨著試驗指標參數的改變,株距變異系數沒有明顯的變化規律,且均在6%以內,表明編織機每次走紙均勻性良好。
2)圖案編織試驗表明,5種不同尺寸的測試圖案,圖案相對位置變異系數與編織面積變異系數均小于30%;圖案相對位置變異系數先減小后趨于穩定,最終穩定在17%左右;編織面積變異系數一般在10%以下,圖案編織精度逐漸提高,后趨于穩定。進一步田間試驗結果顯示,圖案相對位置變異系數為18.26%,編織面積變異系數為10.87%,形成的圖案視覺效果較好。目前僅為苗期效果的功能性驗證,要達到花期景觀效果,還要結合更大地塊、更多農藝要求進行更深入的研究。
猜你喜歡
作文周刊·小學一年級版(2025年8期)2025-04-08 00:00:00
環球時報(2022-11-03)2022-11-03 05:18:49
少兒科學周刊·兒童版(2022年10期)2022-06-27 16:36:06
現代裝飾(2021年6期)2021-12-31 05:27:54
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
小學科學(學生版)(2020年7期)2020-07-28 08:00:52
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
少兒美術(快樂歷史地理)(2019年6期)2019-10-12 08:21:30
Coco薇(2017年7期)2017-07-21 07:16:04
照明工程學報(2016年3期)2016-06-01 12:17:56
