一種果蔬采摘柔性末端夾持器的設計與制作
2021-04-19 12:31:17張珂張駐軍李英杰田輝李祥付
河南農業·綜合版 2021年3期
關鍵詞:設計
張珂 張駐軍 李英杰 田輝 李祥付

目前,機器人技術已經在工業、醫療、軍事、科學勘探等方面得到了廣泛的應用,隨著農業機械化、自動化的深入發展,機器人技術在農業生產方面發展迅速。其中,采用柔性材料制造的軟體機器手在農作物采摘方面有著獨特的優勢,較強的靈活性使其適應農作物枝葉錯綜復雜的環境;良好的柔韌性使其能夠摘取不同形狀的果實,通用性比較廣;高效的過載保護能力使其避免載荷過大時損害果實。
本設計選取多腔室應變的方式設計制作了一種果蔬采摘柔性末端夾持器。夾持器由應變抑制層和充氣應變腔室部分組成,采用超彈性硅橡膠材料制作,選用空氣為傳動介質,基于帕斯卡原理,通過控制腔體內的氣壓來控制夾持器的伸長與彎曲,完成果蔬的
采摘。
一、結構設計與運動原理
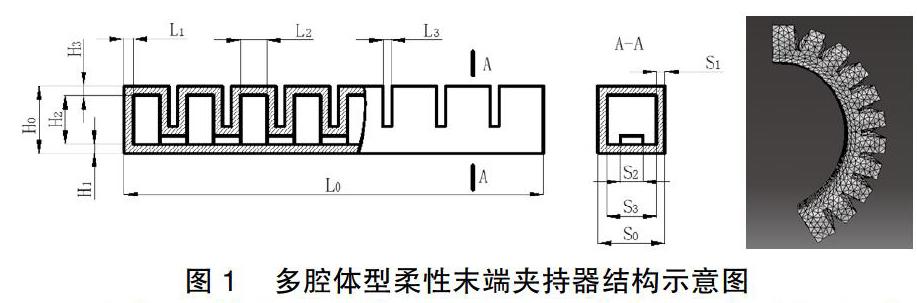
果蔬采摘柔性末端夾持器采用多腔室應變結構,由底層的應變抑制層和充氣應變腔室部分組成,其結構示意圖如圖1,在充氣應變腔室通入氣壓后,由超彈性材料構成的腔室發生膨脹,沿長度方向互相遠離,底層的應變抑制層限制了其在底層的膨脹變形,使柔性末端夾持器向應變抑制層彎曲,采用3個圓周分布的夾持器配合使用,通過改變氣壓大小和腔室尺寸分布來控制“三爪機械手”的彎曲程度和夾取能力,完成果蔬的抓取。
在尺寸設計時,沿長度方向的壁厚L1相對于其他方向的壁厚稍小,其目的是使夾持器充氣膨脹以后主要沿長度方向膨脹,在底層的應變抑制層的作用下實現最大程度的彎曲效果,防止其他方向的膨脹,提高工作效率。
二、果蔬采摘柔性末端夾持器的制備
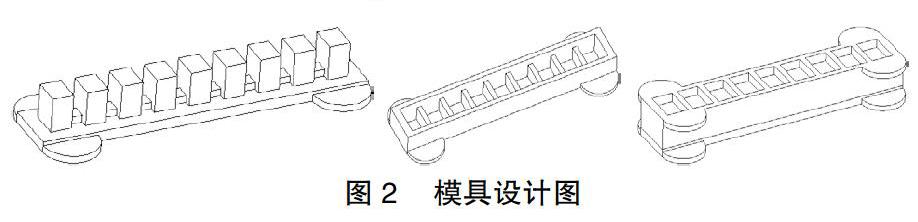
本設計的材料采用Ecoflex-0050硅橡膠澆注而成,此類硅膠應變性能好,具有很好的彈性以及伸長率。模具采用SolidWorks三維設計軟件進行建模,導入3D打印軟件中進行切片處理,采用3D打印機打印出充氣應變腔室部分的上下模如圖2。分型面的選擇要便于脫模和模具的制造,下模結構尺寸與夾持器的內部輪廓一致,上模結構尺寸與夾持器的外部結構尺寸一致,上下模組合使用澆鑄出腔室結構。
由于硅膠材料有一定黏度,在攪拌混合時會混入氣泡,影響軟體夾持器的力學性能,故混合后的硅膠澆注到模具中,需要放入真空箱中進行除泡處理,靜置使其凝固成型。取出充氣應變腔室部分和應變抑制部分,對應擺放后采用硅膠黏接劑進行黏合,將3個夾持器沿圓周分布裝配為三爪結構完成制作。
三、動力傳輸系統的設計
氣壓驅動是軟體機器人領域應用比較廣闊的驅動方式,根據本設計在果蔬采摘方面應用的特點,選用氣壓傳動方式,無環境污染,可針對不同的工作狀況實現無級調速,相對于液壓傳動氣壓傳動的流體黏度很小,流動時阻力損失小。圖3為氣壓傳動回路圖。該氣動回路的能源裝置為氣泵,搭配儲氣罐使用;執行元件是果蔬采摘柔性末端夾持器;控制元件有精密調壓閥、二位三通電磁換向閥;輔助元件包括普通壓力表和精密壓力表。
將裝配完成的軟體機械手與氣壓傳動回路連接,工作時由氣泵輸出壓縮空氣,通過調節調壓閥以調節氣壓至適當范圍,通過二位三通電磁換向閥控制氣動回路的通斷。當電磁閥打開時,換向閥位于接通位置,當電磁閥關閉時,換向閥處于斷開位置。換向閥后的普通壓力表測定通入的氣壓,當普通壓力表讀數小于精密壓力表的量程時,才能保證精密壓力表的安全使用,此時可打開閥門,通入氣壓進行抓取,精密壓力表所測得的讀數即為摘取果實時的工作壓力。
四、總結
該設計在模仿人手結構和特點的基礎上,以目前仿生機械手的研究進展為依托,結合三維建模軟件、3D打印技術和氣壓傳動知識,設計出針對果蔬采摘的末端夾持器。隨著各種超彈性材料的發展、先進的有限元分析及設計仿真軟件的應用以及農業生產現代化的推進,農業軟體機器人的設計研發更加方便,這將會是軟體機器人在農業生產方面迅速發展的一個契機。
〔基金項目:河南省科技攻關項目(182102110356),2020年度河南省新工科研究與實踐項目(2020JGLX014),河南省教育科學“十三五”規劃2020年度一般課題(2020YB045)〕
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04