基于SRTM控制的高分遙感影像區(qū)域網(wǎng)平差方法
2021-04-20 08:36:22秦玉剛
北京測(cè)繪 2021年3期
關(guān)鍵詞:區(qū)域
王 賀 陳 寧 秦玉剛
(32023部隊(duì), 遼寧 大連 116023)
0 引言
近年來,我國(guó)航空航天技術(shù)快速發(fā)展,遙感影像的光譜分辨率、時(shí)間分辨率、空間分辨率不斷提高。自主研制的立體測(cè)繪衛(wèi)星如資源三號(hào)衛(wèi)星、天繪衛(wèi)星主要用于1∶50 000立體測(cè)繪[1-2];高分系列衛(wèi)星如高分一號(hào)[3]、高分二號(hào)[4]、吉林一號(hào)[5]、高景一號(hào)衛(wèi)星[6]等能夠快速獲取高分辨率遙感影像能力。特別是吉林一號(hào)、高分二號(hào)、高景衛(wèi)星空間分辨率達(dá)到亞米級(jí),大大提高衛(wèi)星對(duì)地觀測(cè)能力。為我國(guó)的資源普查、地理國(guó)情檢測(cè)、重大自然災(zāi)害遙感監(jiān)測(cè)評(píng)估運(yùn)行提供數(shù)據(jù)支撐。
在國(guó)土資源三調(diào)過程中需要利用衛(wèi)星影像進(jìn)行分析,通常需要兩張或多張衛(wèi)星影像進(jìn)行鑲嵌處理獲得較大區(qū)域的影像數(shù)據(jù)。在影像鑲嵌處前需要進(jìn)行影像正射糾正,而不同軌道的衛(wèi)星影像定位模型存在一定的系統(tǒng)幾何差異,采用原始定位參數(shù)進(jìn)行正射糾正、影像鑲嵌處理容易導(dǎo)致鑲嵌影像重疊區(qū)域地物不重合現(xiàn)象。相關(guān)學(xué)者通過攝影測(cè)量學(xué)的區(qū)域網(wǎng)平差處理方法提高影像的幾何精度。文獻(xiàn)[7]提出以航天飛機(jī)雷達(dá)地形測(cè)繪使命(Shuttle Radar Topography Mission, SRTM)為約束進(jìn)行光學(xué)衛(wèi)星影像的立體正射糾正,該方法以SRTM為控制對(duì)資源三號(hào)衛(wèi)星影像的立體像對(duì)生產(chǎn)數(shù)字高程模型(Digital Elevation Model,DEM),進(jìn)行定向參數(shù)的求解,并以精化的定向參數(shù)糾正生成正射影像,但生產(chǎn)DEM的精度對(duì)定向參數(shù)解算影像較大;文獻(xiàn)[8]提出利用DEM數(shù)據(jù)作為高程約束的平面區(qū)域網(wǎng)平差方法,利用高程數(shù)據(jù)為約束條件提高影像的定位精度,獲得較好的實(shí)驗(yàn)效果。文獻(xiàn)[9]通過模擬激光數(shù)據(jù)引入高程控制,將激光高程點(diǎn)引入?yún)^(qū)域網(wǎng)平差中,構(gòu)建激光約束的區(qū)域網(wǎng)平差,提高了立體測(cè)繪影像的有理多項(xiàng)式系數(shù)(Rational Polynomial Coefficient,RPC)參數(shù)精度。但上述方法僅適合三線陣的立體測(cè)繪上進(jìn)行處理,對(duì)于遙感影像的適應(yīng)性較差,限制算法的應(yīng)用性;文獻(xiàn)[10]提出基于基準(zhǔn)網(wǎng)輔助的大區(qū)域衛(wèi)星影像區(qū)域網(wǎng)平差算法,該方法以高精度的DOM、DEM為控制,通過影像匹配技術(shù)獲取同名點(diǎn)坐標(biāo),利用高精度DOM、DEM為控制精化RPC參數(shù),計(jì)算過程復(fù)雜,完全可以用匹配高精度的同名點(diǎn)計(jì)算影像間的映射關(guān)系糾正影像。文獻(xiàn)[11]提出多源衛(wèi)星影像的區(qū)域網(wǎng)聯(lián)合平差算法,影像自動(dòng)匹配技術(shù)獲取連接點(diǎn),并對(duì)整個(gè)測(cè)區(qū)進(jìn)行自由網(wǎng)平差,精化影像定位精度,對(duì)于WorldView和QuickBird獲得較好的實(shí)驗(yàn)效果。但對(duì)于視場(chǎng)角較小的高分系列衛(wèi)星效果較差。文獻(xiàn)[12]提出基于有理函數(shù)多項(xiàng)式模型的區(qū)域網(wǎng)平差方法,通過對(duì)影像進(jìn)行仿射變換的方式更新影像RPC參數(shù),最后進(jìn)行影像的幾何校正處理。由于資源三號(hào)衛(wèi)星的立體測(cè)繪影像的視場(chǎng)角一般在25°,且前、下、后視影像有較多的光線交會(huì)一點(diǎn),因此光線交會(huì)幾何性較好。光束法區(qū)域網(wǎng)平差在三線陣立體測(cè)繪衛(wèi)星精化RPC參數(shù),具有較好的穩(wěn)定性。但對(duì)于環(huán)境監(jiān)測(cè)及自然資源探測(cè)的高分系列衛(wèi)星,為了較大的節(jié)省成本,不同軌道的衛(wèi)星影像的重疊區(qū)域較小(通常不大于10%)。此外,衛(wèi)星在太空飛行軌道高度基本高于500 km以上,衛(wèi)星的視場(chǎng)角相對(duì)較小,因而導(dǎo)致異軌影像間的基高比很小,造成異象影像的弱交會(huì)現(xiàn)象,在影像RPC參數(shù)精化過程中導(dǎo)致地面高差誤差放大的情況。
鑒于此,本文提出SRTM為控制的高分辨率遙感影像區(qū)域網(wǎng)平差方法。通過引入高程控制,避免弱交會(huì)情況下,高程誤差放大導(dǎo)致平差無(wú)法收斂的情況。利用兩組高分一號(hào)衛(wèi)星數(shù)據(jù)進(jìn)行測(cè)試驗(yàn)證本文方法的可行性。
1 基本原理
1.1 SRTM高程控制原理
由于衛(wèi)星視場(chǎng)角較小,不同軌道的影響重疊區(qū)域較小導(dǎo)致相鄰軌道間普遍存在弱交會(huì)的現(xiàn)象,將導(dǎo)致相鄰軌道連接點(diǎn)的物方坐標(biāo)在平差過程中會(huì)有高程誤差放大現(xiàn)象。高程誤差放大,造成區(qū)域網(wǎng)平差無(wú)法收斂。首先,利用光線投影法計(jì)算連接點(diǎn)物方坐標(biāo),并取相鄰軌道的連接點(diǎn)的物方坐標(biāo)平均值作為光束法區(qū)域網(wǎng)平差的初始物方坐標(biāo)值。如圖1所示,取相鄰軌道連接點(diǎn)物方坐標(biāo)初始值為Zint,進(jìn)行光束法區(qū)域網(wǎng)平差可得到一組地面坐標(biāo)的改正量,將Zint修正為Z1的位置。由于衛(wèi)星的弱交會(huì)現(xiàn)象,將造成Z1高程誤差在光束法平差中放大的情況。因此,為了避免高程誤差Z1的影響,以Z1的平面坐標(biāo)在SRTM高程模型中內(nèi)插一新的高程值Z1′來替代Z1作為新的連接點(diǎn)物方坐標(biāo),進(jìn)入下一次光束法區(qū)域平差中迭代計(jì)算,重復(fù)如此操作直到光束法區(qū)域平差迭代收斂。通過將相鄰軌道的連接點(diǎn)高程誤差控制SRTM模型的合理范圍內(nèi)部,使光束法區(qū)域平差收斂避免高程誤差造成的誤差求解失敗,最終校正軌道且降低共軛點(diǎn)相對(duì)偏移效果。
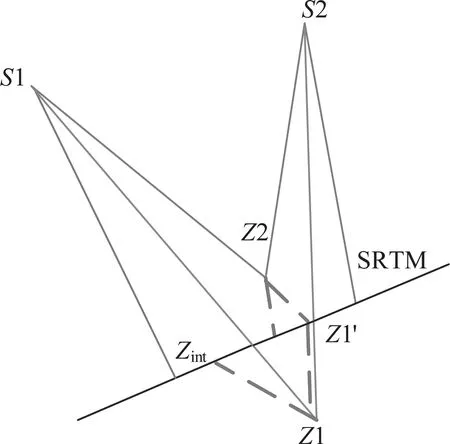
圖1 SRTM高程控制示意圖
1.2 衛(wèi)星影像區(qū)域網(wǎng)平差模型
由于現(xiàn)在的衛(wèi)星多采用電荷耦合器件(Charge Coupled Device, CCD)拼接成像,而推掃式成像導(dǎo)致影像的每一行影像具有一組外方位元素,且定向參數(shù)間存在較大的相關(guān)性;影像的長(zhǎng)焦距、窄視場(chǎng),因此可將衛(wèi)星影像看作近似中心投影的影像。采用嚴(yán)密的幾何成像模型進(jìn)行區(qū)域網(wǎng)平差需解算的外方位元素過多,解算結(jié)果不穩(wěn)定的現(xiàn)象。國(guó)內(nèi)學(xué)者張過通過實(shí)驗(yàn)證明采用有理函數(shù)模型進(jìn)行影像定向參數(shù)解算能夠獲得與嚴(yán)密幾何模型同樣的幾何定位精度,而且解算的過程簡(jiǎn)單、計(jì)算速度快等優(yōu)點(diǎn)[13]。因此,選擇有理函數(shù)多項(xiàng)式幾何模型作為平差的數(shù)學(xué)模型。
RFM 有理函數(shù)多項(xiàng)式是利用地面點(diǎn)(X,Y,Z)的多項(xiàng)式的比值來表示影像的像點(diǎn)坐標(biāo)(c,r),常用的形式為:
(1)
式(1)中,pi(i=1,2,3,4)為每個(gè)物方坐標(biāo)(Xi,Yi,Zi)的3次多項(xiàng)式,光學(xué)投影帶來的變形采用一次多項(xiàng)式表達(dá),大氣折射、地球曲率及鏡頭畸變帶來的變形采用二次項(xiàng)表達(dá),傳感器震動(dòng)及未知因素帶來變形采用三次項(xiàng)表達(dá)。
1.3 弱交會(huì)情況的區(qū)域網(wǎng)平差
由于采用RFM有理函數(shù)模型表達(dá)影像定位模型,模型參數(shù)不在具有具體的物理意義。因此,無(wú)法建立影像定位誤差(軌道誤差、姿態(tài)誤差、安裝角誤差)與RFM參數(shù)間的直接聯(lián)系。文獻(xiàn)[14]將線陣推掃式的成像傳感器誤差在像方進(jìn)行補(bǔ)償,消除影像的軌道誤差、姿態(tài)誤差、安裝角誤差,建立的補(bǔ)償模型為:
(2)
式(2)中,(r,c) 為影像像方坐標(biāo);(Δr,Δc)為像方的像點(diǎn)誤差改正模型,可以表示為:
(3)
式(3)中,(e0,e1,e2)和(f0,f1,f2)為影像的仿射變換系數(shù);像方誤差系統(tǒng)補(bǔ)償模型中常用的是仿射變換模型,采用1個(gè)外業(yè)控制點(diǎn)解算沿軌和垂軌方向的位置偏移參數(shù)e0、f0。采用2個(gè)外業(yè)控制點(diǎn)解算位置偏移參數(shù)、漂移參數(shù)(由陀螺積分引起的飄逸誤差)e0、f0、e2、f2;獲得較高的幾何定位精度;采用3個(gè)野外控制點(diǎn)可以6個(gè)參數(shù)。
對(duì)公式(2)進(jìn)行泰勒一階多項(xiàng)式展開,將像點(diǎn)的物方坐標(biāo)(X,Y,Z)及像方仿射變換項(xiàng)(e0,e1,e2)和(f0,f1,f2)補(bǔ)償模型參數(shù)作為未知數(shù),利用最小二乘算法一并求解。
(4)
2 實(shí)驗(yàn)與結(jié)果
2.1 實(shí)驗(yàn)數(shù)據(jù)
文中選取山區(qū)、平原兩種不同地形數(shù)據(jù)的高分一號(hào)數(shù)據(jù)作為測(cè)試影像數(shù)據(jù),共四景影像。山區(qū)地形數(shù)據(jù)為某區(qū)域的2景影像數(shù)據(jù),該區(qū)域的平均高程為523 m,最大高程為754 m,最小高程數(shù)據(jù)為259 m,主要驗(yàn)證山區(qū)地形數(shù)據(jù)引入SRTM約束下的區(qū)域網(wǎng)平差算法的精度;區(qū)域2為平原區(qū)域數(shù)據(jù),該區(qū)域的平均高程為124 m,最大高程為337 m,最小高程數(shù)據(jù)為41 m,主要驗(yàn)證平原區(qū)域引入SRTM約束進(jìn)行區(qū)域網(wǎng)平差算法的精度。
2.2 試驗(yàn)方案設(shè)計(jì)
為了驗(yàn)證引入SRTM約束下進(jìn)行區(qū)域網(wǎng)平差精度驗(yàn)證,通過平差后生成的新的RPC文件作為遙感影像正射糾正影像參數(shù)文件,對(duì)比原始RPC文件與更新后的RPC文件糾正的影像效果驗(yàn)證本文方法的有效性,本文對(duì)兩個(gè)測(cè)區(qū)的高分一號(hào)數(shù)據(jù)進(jìn)行處理,主要按照如下2種方案進(jìn)行實(shí)驗(yàn)。
方案1:每個(gè)立體像對(duì)進(jìn)行自由網(wǎng)平差并生成新的RPC文件。利用連接點(diǎn)計(jì)算的物方坐標(biāo)反算像方統(tǒng)計(jì)影像行方向與列方向的像方殘差。
方案2:以SRTM為高程方向約束,驗(yàn)證交會(huì)角較小情況下采用高程約束的平差結(jié)果。同方案1一樣,利用連接點(diǎn)計(jì)算的物方坐標(biāo)反算像方統(tǒng)計(jì)影像行方向與列方向的像方殘差。
2.3 SRTM控制的衛(wèi)星影像區(qū)域網(wǎng)平差試驗(yàn)
分別對(duì)山地、平原兩組不同數(shù)據(jù)采用方案1和方案2進(jìn)行自由網(wǎng)平差和SRTM約束下的區(qū)域平差試驗(yàn),通過影像匹配算法獲取相鄰影像間的連接點(diǎn)。對(duì)獲取的連接點(diǎn)采用引入SRTM數(shù)據(jù)約束的區(qū)域平差算法,避免基高比小的高分影像導(dǎo)致高程誤差放大情況帶來影像平差失敗的現(xiàn)象,提高影像的定位精度。
精度評(píng)定方法采用在像方坐標(biāo)系上進(jìn)行,即利用無(wú)控平差、SRTM約束下的區(qū)域網(wǎng)平差生成的影像RPC參數(shù),利用像點(diǎn)量測(cè)計(jì)算的像點(diǎn)同名點(diǎn)坐標(biāo)以及對(duì)應(yīng)區(qū)域的DEM數(shù)據(jù)通過前方交會(huì)的算法計(jì)算出該點(diǎn)的物方坐標(biāo);然后將物方空間坐標(biāo)反算像方與原始像點(diǎn)量測(cè)坐標(biāo)進(jìn)行比較分析。結(jié)果如表1所示,無(wú)控制點(diǎn)約束的區(qū)域網(wǎng)平差算法計(jì)算山地區(qū)域影像行方向、列方向中誤差分別為1.435像素、1.324像素,SRTM約束的區(qū)域網(wǎng)平差算法平原區(qū)域影像行方向、列方向中誤差分別為0.825像素、0.627像素相比無(wú)控區(qū)域網(wǎng)平差算法有所提高到1個(gè)像素以內(nèi);該結(jié)論在山地區(qū)域同樣適用。實(shí)驗(yàn)的具體精度統(tǒng)計(jì)結(jié)果見表1所示。
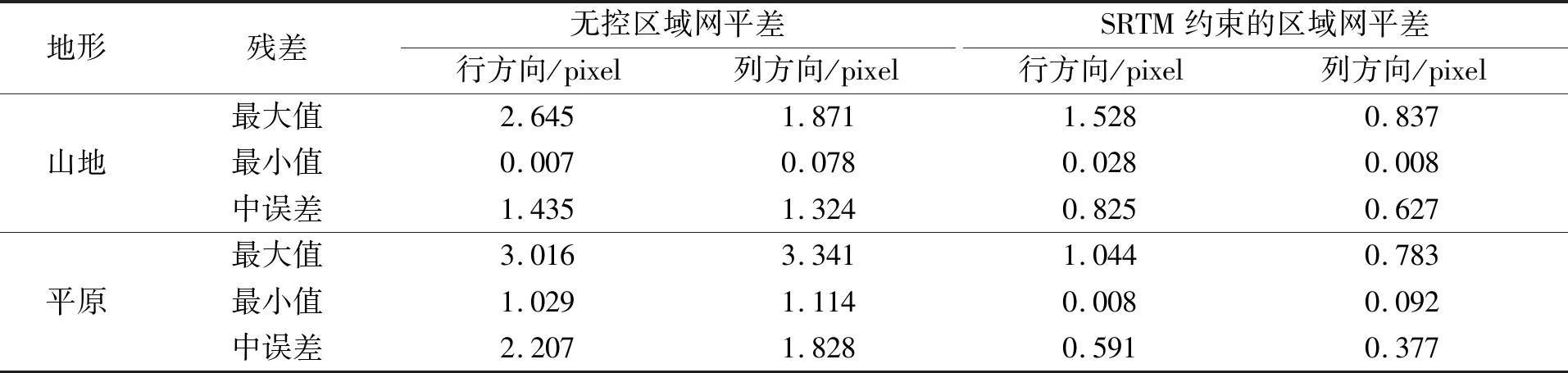
表1 不同地形不同方法的精度統(tǒng)計(jì)
2.4 正射影像效果對(duì)比
分布利用無(wú)控平差生成RPC參數(shù)、SRTM高程約束平差后的RPC參數(shù)以及SRTM數(shù)據(jù)對(duì)影像做正射校正處理生成數(shù)字正射影像,通過疊加顯示相鄰正射影像的效果,對(duì)比采用SRTM數(shù)據(jù)對(duì)交會(huì)角較小的影像進(jìn)行高程約束提高平差后影像的相對(duì)定位精度,對(duì)比效果圖如圖2所示,圖2(a)、(c)表示采用無(wú)控平差生成RPC進(jìn)行影像正射校正結(jié)果對(duì)應(yīng)的相鄰影像的接邊效果;圖2(b)、(d)表示采用SRTM高程約束平差生成RPC進(jìn)行影像正射校正結(jié)果對(duì)應(yīng)的相鄰影像的接邊效果。從不同地形數(shù)據(jù)、不同方案生成RPC文件進(jìn)行影像正射校正,生成正射影像的接邊效果來看,無(wú)控平差在山地區(qū)域影像垂軌方向接邊處存在接邊誤差,而采用SRTM約束生成正射影像接邊處基本不存在接邊誤差;對(duì)于平原區(qū)域無(wú)控平差生成的接邊影像在沿軌方向存在較大的接邊誤差,而SRTM約束下生成的影像拼接結(jié)果達(dá)到無(wú)縫接邊效果,影像接邊處的相對(duì)精度得到提升,滿足缺少控制點(diǎn)數(shù)據(jù)下生成“一張圖”的需求。
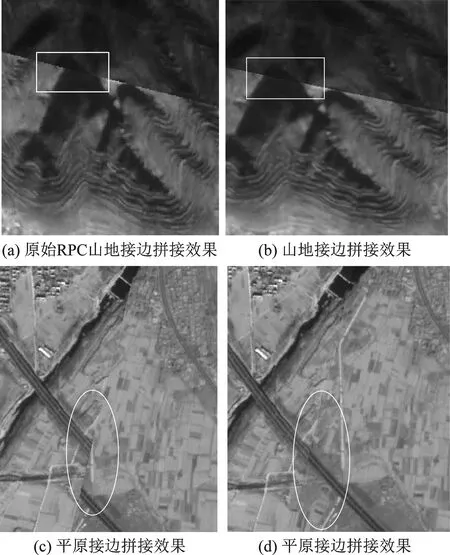
圖2 正射影像效果對(duì)比圖
3 結(jié)束語(yǔ)
本文針對(duì)高分影像衛(wèi)星重疊度低、立體交會(huì)角較小的情況,采用SRTM數(shù)據(jù)進(jìn)行高程方向控制,避免因基高比較小導(dǎo)致高程誤差放大現(xiàn)象,影響平差后生成影像RPC定位精度。利用不同區(qū)域的高分一號(hào)衛(wèi)星影像進(jìn)行了試驗(yàn),經(jīng)過平差后生成的RPC參數(shù)結(jié)合SRTM數(shù)據(jù)對(duì)影像做正射校正處理,能夠保障整個(gè)區(qū)域影像糾正后,達(dá)到較高的相對(duì)幾何精度,幾何上達(dá)到了無(wú)縫拼接的水平。但該方法缺少對(duì)采用不同高程精度數(shù)據(jù)對(duì)輔助高程平差后生成RPC定位精度影響的考慮,這也是下一步研究的方向。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15
