這個機器牛是頂流
2021-04-20 12:31:57劉芯伶
大學生 2021年4期
劉芯伶
從節目表現來看,拓荒牛的先進性在于動作自然柔順,反應快速準確。這種人都很難做得到的表演,有賴于系統和控制兩方面的高效結合。
讓機器人“整齊劃一”有多難
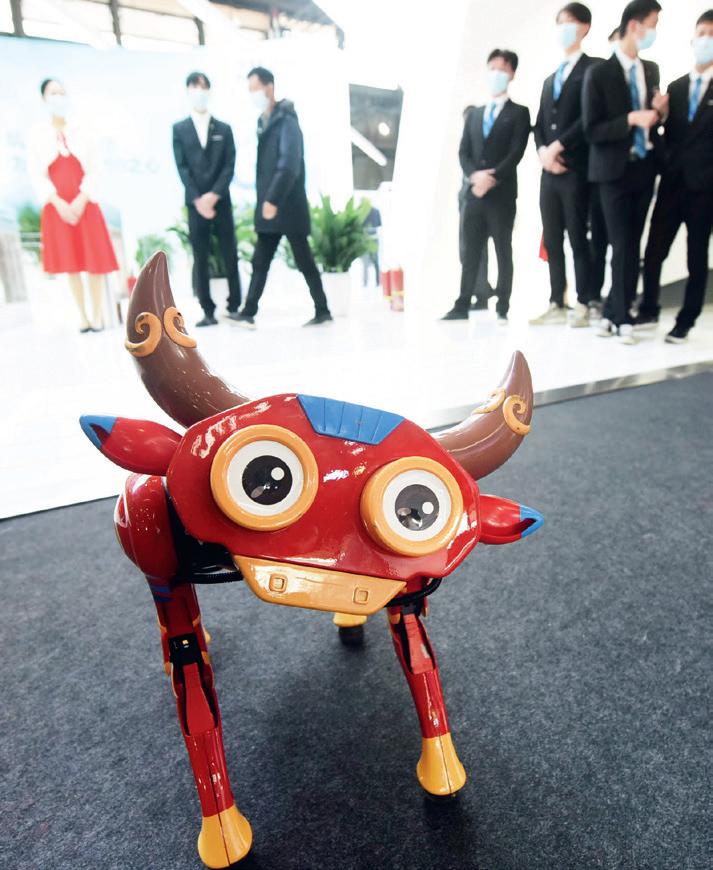
據提供“拓荒牛”機器人的公司介紹,它本體重量 60 kg,最大負重達到 15 kg,采用了通用力控關節,同時滿足高精度高帶寬力矩控制和較大的力矩質量比,其背后蘊含著一系列中國科技企業自主研發的硬核技術:高性能實時主控系統、力控伺服驅動器、全動力學優化算法、激光雷達定位導航算法
讓數十臺機器人以整齊劃一的動作完成表演,在硬件控制和軟件算法上都存在著許多難點。以今年春晚上亮相的“拓荒牛”為例,主要難點有二。
一是力控關節
要具備優美、連貫的肢體表現力,關節的靈活運用起到了關鍵的作用。“拓荒牛”機器人能夠做出高難度動作,也是歸功于此。它共有16個自由度:每條腿3個自由度 (共計12個)、頭部3個自由度、尾巴1個自由度。在擁有如此多的自由度下,能讓“關節”精準地輸出位置和力矩,力控伺服驅動器是核心。簡單來說,就是機器人身上的每個伺服驅動器,在接收到指令之后會做到實時響應;多個伺服驅動器“協同運行”,便可以讓機器人靈活運動起來了。
從硬件構成來看,伺服驅動器主要包括了電機、減速器、碼盤和力矩反饋單元等。針對“拓荒牛”的表演任務,對伺服驅動器各個硬件的選型,也成為了一個重要的問題。這一問題靠利用正反驅固有頻率匹配和慣量匹配的方法,得到很好的解決。
與其他四足機器人產品不同,“拓荒牛”四足機器人采用的通用力控關節,未來能夠在其他機器人產品上作為腿部和手臂關節使用。值得一提的是,這是在2020年10月才剛剛研發出來的。
二是步態算法和定位算法
從舞臺上“拓荒牛”的表演中不難看出,大型四足機器人在臺上不僅要快速行進,而且還要完成高難度動作,這就需要高動態運動控制算法,來實現給定軌跡的跟蹤。
提供機器人的企業早前在大型仿人服務機器人Walker的研發中,對“基于優化的全身運動控制”算法軟件庫很熟悉,使得此次對于“拓荒牛”機器人的算法研發工作,并不是“從0到1”的過程。在Walker的動力學模型基礎上,他們快速研制出適用于四足機器人的模型。
除此之外,要完成表演,還需根據舞蹈的動作命令,利用軟件庫實時求解出各個關節所需要的力矩。同時對“演員”在舞臺的定位也是算法層面的另一個難題。為此, 工程師們針對舞臺現場的特點,優化了激光雷達建圖定位算法,建立了舞臺的3D地圖,解決了這一問題。
與此同時,在高性能算力的支持下,這些復雜的算法才能夠控制在1kHZ下實時完成。
機器人大賽中的四足機器人
四足機器人在大學生機器人比賽中也常有亮相。據北京科技大學MEI機器人隊輔導老師介紹,在ROBOCON比賽中采用的四足機器人,以雷達紅藍場互換結構實現定位導航,運用逆向運動學的知識設計末端執行器,在設計出擺動軌跡后,計算出電機在運動時刻擺動的角度,以實現跳躍避障、原地轉向和步態平衡。
在人工智能和機器人教育蓬勃發展的大形勢下,四足機器人由于其結構簡單、部署方便,能夠幫助學生快速理解和實踐基礎人工智能和機器人知識,助力高校科研教育;另外在商業服務、安防巡檢等領域,四足機器人在復雜環境中有更好的運動能力,能夠為各行各業提供智能服務。
目前四足機器人沒有正式開售,前期硬件、軟件及其他研發費用較高,市場上的剛性需求并不清晰,商業化仍待時間考驗。且從市場規模和國家政策支持來看,機器人產業的發展前景十分廣闊。機器人行業的發展以技術進步為導向,相信隨著先進技術的不斷更新迭代,智能機器人將會走進千家萬戶,讓我們的生活更加便捷、更加智能。
責任編輯:樸添勤
猜你喜歡
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:47:32
鳳凰動漫(軍事大王)(2022年1期)2022-04-19 11:35:30
音樂天地(音樂創作版)(2021年3期)2021-05-25 12:05:06
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
好孩子畫報(2014年6期)2014-07-25 03:20:04