基于硬件在環(huán)的泊車控制器仿真測試
2021-04-21 14:15:28宋紹文羅傳東姜家如
汽車實用技術 2021年7期
關鍵詞:系統(tǒng)
宋紹文,羅傳東,姜家如
基于硬件在環(huán)的泊車控制器仿真測試
宋紹文,羅傳東,姜家如
(安徽江淮汽車集團股份有限公司技術中心,安徽 合肥 230601)
文章論述了一種基于硬件在環(huán)的泊車控制器測試系統(tǒng)的方案原理、構成以及測試過程。為了使用硬件在環(huán)測試系統(tǒng)驗證泊車控制器功能,需要完成超聲波探頭激勵測試、泊車控制器探測距離測試、泊車控制器功能測試。最終硬件在環(huán)的泊車控制器測試系統(tǒng)通過場景仿真軟件對交通場景進行視覺模擬。同時,超聲波板卡對模擬交通場景中目標信息進行超聲波仿真模擬,并將以上信息提供給泊車控制器進行決策運算,完成泊車控制器功能的仿真測試。
硬件在環(huán);泊車控制器;仿真測試
前言
泊車控制器是智能駕駛系統(tǒng)的重要組成之一。它可以根據超聲波雷達偵測的障礙物距離信息以,計算泊車軌跡,自動控制轉向系統(tǒng)、制動系統(tǒng)、引擎系統(tǒng)、傳動系統(tǒng)完成自主泊車。
隨著智能駕駛產品的不斷開發(fā)迭代。智能駕駛產品的開發(fā)過程逐漸從以硬件為主導向著以數(shù)據為主導演變。傳統(tǒng)的場地測試、單一場景的實車測試難以滿足智能駕駛對極限危險工況、復雜場景的需求。
硬件在環(huán)測試則具有迭代開發(fā)、重復性好、場景豐富多樣的優(yōu)點。硬件在環(huán)泊車控制器測試系統(tǒng)通過場景仿真軟件對視覺交通場景進行模擬。該測試系統(tǒng)有助于在產品開發(fā)過程中及時發(fā)現(xiàn)設計缺陷和潛在問題,并指導實車測試,進一步提高產品的安全性和可靠性,縮短開發(fā)周期[1]。
1 系統(tǒng)方案
硬件在環(huán)泊車控制器測試系統(tǒng)方案為:通過場景仿真軟件為泊車控制器模擬各種泊車環(huán)境;泊車環(huán)境中不同距離障礙物的信息,由超聲波仿真板卡模擬實現(xiàn)。
系統(tǒng)主要有上位機、實時處理器、超聲波暗室、泊車控制器構成。系統(tǒng)各部分作用如下:
上位機:提供測試所需的虛擬道路、交通場景以及虛擬傳感器信號。
實時處理器:進行實時信息處理。
超聲波暗室:將實時處理器中仿真的障礙物信號通過仿真探頭轉換成真實探頭可以識別的超聲波信號。
2 雷達探頭測試
2.1 探頭調試
系統(tǒng)上電后,在虛擬場景中沒有障礙物的情況下。先通過CANoe監(jiān)測泊車控制器障礙物距離報文。
若報文中障礙物距離為0,則探頭集成沒有問題;如果個別探頭檢測到障礙物距離不為0,則需要進行調整,直至障礙物距離為0。圖1所示報文信息顯示障礙物距離全為0,代表探頭間沒有相互干擾。
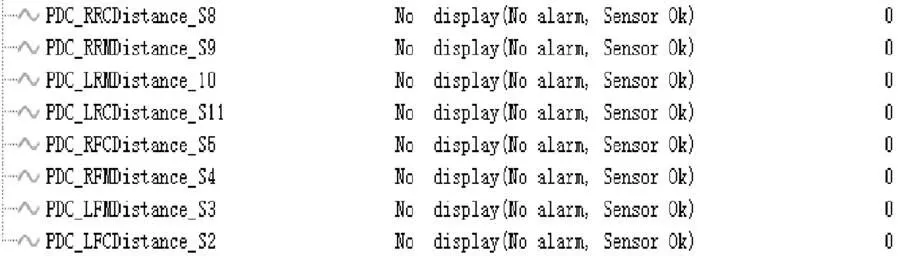
圖1 障礙物距離信息
2.2 探頭模擬距離測試
通過CANoe給泊車控制器回放實車報文,激活泊車控制器功能。配置超聲波探頭的回波時間,模擬不同的障礙物距離信息。對比泊車控制器報文信息中識別距離與模擬距離的誤差大小,并適當標定回波時間,從而將模擬的距離與泊車控制器識別距離進行標定。

圖2 回波探頭的回波時間設置

圖3 泊車控制器識別距離信息
回波測試時間需要保證在1分鐘以上,確保在這段時間內泊車控制器識別的距離穩(wěn)定沒有波動。對每個探頭進行逐一測試后,對所有探頭進行聯(lián)調測試,排除互相干擾。圖2所示探頭回波時間具體設置,圖3為泊車控制器報文信息中識別到障礙物的距離信息。
虛擬場景中的障礙物距離,按照計算公式s =v* t/2轉換為飛行時間參數(shù)后,輸入超聲波仿真板卡從而進行回波模擬。運行硬件在環(huán)工程,進一步測試虛擬場景中的障礙物距離和泊車控制器反饋的距離是否與實車一致,根據測試結果進行一定的補償。
對于此誤差通過飛行時間補償和修改模型中雷達探頭FOV的方法進行補償,補償算法代碼如圖4所示。雷達探頭的FOV設置如圖5所示。

圖4 補償代碼
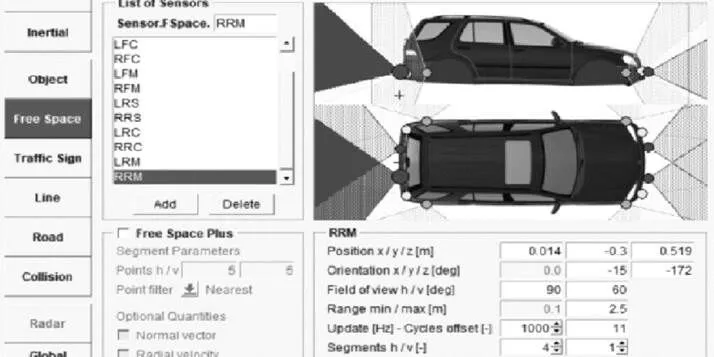
圖5 FOV設置
完成以上參數(shù)設置后,確認場景中障礙物的距離與泊車控制器識別一致后便可進行硬件在環(huán)測試。
3 硬件在環(huán)測試
3.1 水平泊車測試
在場景仿真軟件中按照功能規(guī)范和測試要求,搭建泊車控制器硬件在環(huán)水平泊車測試用例。按下泊車控制器功能開關,激活泊車控制器泊車功能,開始進行硬件在環(huán)自動化測試。車輛在虛擬場景中會按照開始設定預先設定的測試用例,逐條進行水平泊車功能測試。
測試中,當泊車控制器搜索到車位后,泊車控制器會根據虛擬環(huán)境環(huán)境信息,提示找到車位并緩慢行駛,并控制虛擬車輛模型完成,進而實現(xiàn)半自動泊車測試。圖6為水平泊車測試情況。

圖6 水平泊車
3.2 垂直泊車測試
同水平泊車測試類似,垂直泊車測試前先在場景仿真軟件中按照功能規(guī)范和測試要求,搭建泊車控制器硬件在環(huán)垂直泊車測試用例。然后激活泊車控制器泊車功能,開始進行硬件在環(huán)自動化測試。系統(tǒng)會自動記錄測試結果并輸出測試報告。圖7為垂直泊車測試情況。

圖7 垂直泊車
4 結論
泊車控制器硬件在環(huán)測試,可實現(xiàn)泊車控制器功能策略、故障診斷、網絡系統(tǒng)等測試。該測試系統(tǒng)成功開發(fā),可以在整車控制器的開發(fā)過程中得到應用,提高了測試效率,降低了測試成本[2]。
[1] 崔海峰,劉擁軍,趙向東,王強.基于硬件在環(huán)仿真的汽車制動控制器測試系統(tǒng)[J].上海汽車,2010,000(008):14-17.
[2] 夏鋅.基于硬件在環(huán)的電動汽車整車控制器功能測試方法研究[D].天津:天津大學,2013.
Simulation Test Of Parking Controller Based On Hardware In The Loop
Song Shaowen, Luo Chuandong, Jiang Jiaru
( Technology Center of Anhui Jianghuai Automobile Group Co., Ltd., Anhui Hefei 230601 )
The article discusses the principle, composition and test process of a parking controller test system based on hardware in the loop. In order to use the hardware-in-the-loop test system to verify the function of the parking controller, it is necessary to complete the ultrasonic probe excitation test, the detection distance test of the parking controller, and the function test of the parking controller. Finally, the hardware-in-the-loop parking controller test system visually simulates the traffic scene through scene simulation software. At the same time, the ultrasonic board performs ultrasonic simulation simulation on the target information in the simulated traffic scene, and provides the above information to the parking controller for decision-making calculation, and completes the simulation test of the parking controller function.
Hardware in the loop; Panoramic parking controller; Simulation test
10.16638/j.cnki.1671-7988.2021.07.009
U471
A
1671-7988(2021)07-25-03
U471
A
1671-7988(2021)07-25-03
宋紹文,智能網聯(lián)工程師,就職于安徽江淮汽車集團股份有限公司技術中心。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32