基于模糊PID 對于充電效率的探究
2021-04-24 09:07:22嚴培波
科學技術創新 2021年9期
嚴培波
(鹽城師范學院,江蘇 鹽城224007)
1 概述
由于人們保護環境的意識增強,越來越多的人希望選擇一種便捷且更加環保的出行方式,在這種形勢下發展電動汽車等清潔能源汽車是可行且必要的。而供電系統是電動汽車發展的關鍵,因此,想要更好的發展電動汽車就必須重視充電設備的發展[1]。
根據以前的研究發現,電池的物理性能、環境以及充放電規律等都會影響電池的壽命[2]。充放電的不合理性是蓄電池早期失效的重要原因,因此,如何控制充放電對提高電池的利用率具有重要作用。
不僅蓄電池對電動汽車有很大的影響,電動汽車充電樁也是供電系統的重要組成部分。據統計,2018 年上半年,新增部分的公共汽車充電樁(含專用)比去年同期增長90.6%,其中符合2015 版國標的公共汽車充電樁占比約90%,公交、出租車用電有所增加。
2 電動汽車的快速充電方式
蓄電池的充電方法包括恒壓充電法、恒流充電法和階段式充電法等。這三種充電方法都是以恒壓或者是恒流充電為基礎的,但是它們都存在充電時間長的缺點,這在當今講究高效的社會生活來說是極不方便的,因此研究快速充電法很有必要。這種方法不但要求縮短充電時間,而且要保證在充電過程中盡量減少正負極的極化現象,以此提高充電效率。主要的快速充電方法有:脈沖式充電法、變電流間歇充電法、變電壓間歇充電法。
脈沖式充電法的充電曲線如圖1 所示,原理上運用的是恒流充電法,但是與恒流充電法不同的是脈沖式充電法的電流的形式是脈沖形式,因此,該充電過程的特征是間歇性周期循環。該方法和其它方法不同的地方在于有一個間歇停充期,在這段時間內,蓄電池再生和吸收由化學反應生成的氫和氧,從而去除歐姆極化與濃差極化以達到降低內壓的效果,使其更好地進入下一個充電循環周期,讓更多的電量被蓄電池吸收。通過上述一系列的分析可以看出,該充電方法有效地提升了反應時間,有效控制了蓄電池產生的析氣量,使得整個充電過程的效率得到了更好的提升。
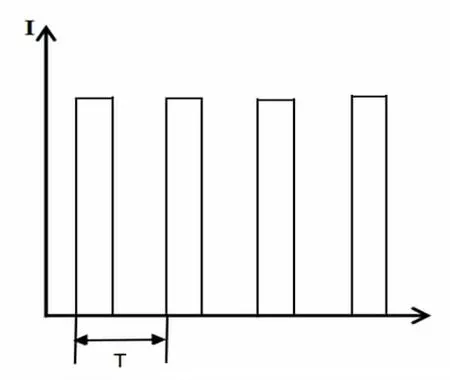
圖1 脈沖式充電法曲線
3 模糊PID 控制的設計及仿真測試
如圖2 所示為模糊PID 控制流程圖。模糊控制器的設計主要包括輸入模糊化、模糊規則的建立、模糊推理、逆模糊化四個部分。模糊PID 的控制過程如圖3 所示。
首先輸入假設給定變量是E(誤差)和EC(誤差變化率)。輸出就是Kp、Ki、Kd 三個參數,以此通過模糊控制幫我們整定Kp、Ki、Kd 的三個參數。離散論域[-12,12],模糊化后的子集E,EC={NB,NM,NS,ZO,PS,PM,PB}。這些子集分別表示負大、負中、負小、零、正小、正中、正大。
運用MATLAB 軟件設計模糊控制器,設計流程如圖5 所示。
4 測試結果
從基于模糊PID 的充電系統的曲線圖6 可以看出運用此種類型的充電系統能夠提高電動汽車的充電效率,并且在35 分鐘左右,兩種電動汽車都可以充電到80%的SOC。充電系統采用模糊PID 控制為基礎,它具有很大的潛力,提供最佳的充電率,并且在充電多個電動汽車能夠同時保持合同電力。此外,關于環境溫度的影響,類似于在第三章中,夏季同時充電的結果導致充電率高、充電時間短。數值計算表明,采用基于模糊PID 的充電樁控制系統可以完成最優的充電。
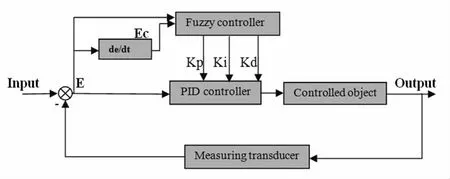
圖2 模糊PID 控制流程圖

圖3 模糊PID 控制過程

圖4 輸入fuzzy
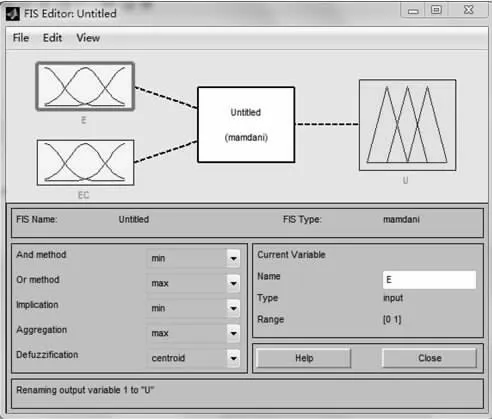
圖5 確認輸入輸出
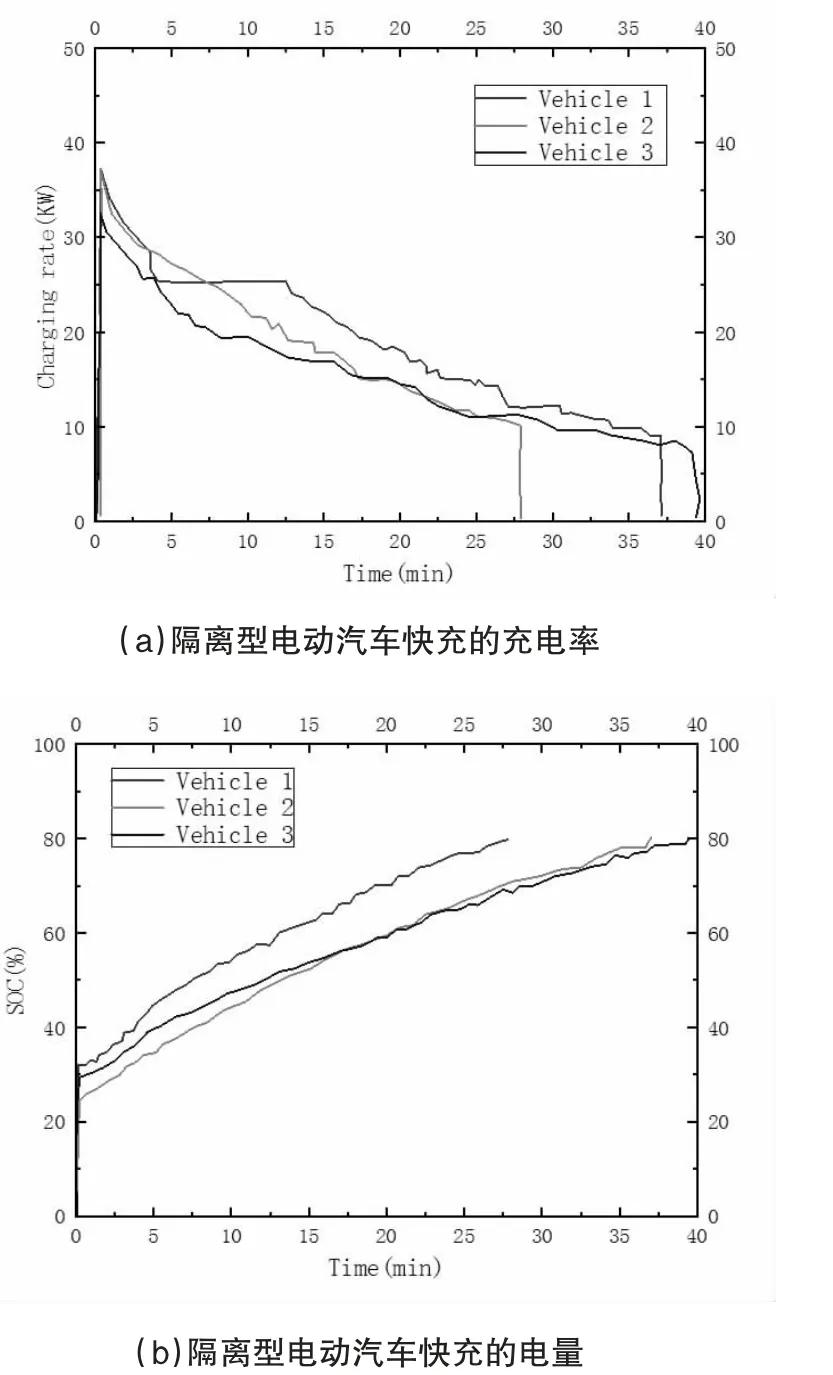
圖6 隔離型電動汽車的充電行為
電動汽車由于其電化學性能穩定、能量密度高、壽命長等特點,一般采用鋰離子電池。由于鋰離子電池的特性,在低電壓下,電池的充放電速率越來越低。通過使用直流充電樁進行充電測試,其輸出電壓范圍為50-500V,輸出電流范圍為0-125A,額定功率輸出為50kW。在相對較長的時間停車后對電動汽車進行充電, 假設電動汽車電池的溫度相對于環境溫度,對三種不同車輛進行三次充電試驗,并對其充電狀態(SOC)進行充電試驗。充電前的電池狀態設置為約30%,當SOC 達到80%時停止充電。
5 結論
從充電樁充電控制系統仿真中我們可以得出,沒有一種控制理論和控制策略能夠適用于車輛的所有情況并取得最優的效果。但在某一種情況下,我們有必要研究一種更有效的理論方法和控制策略。根據當前電動汽車不可逆的發展趨勢,研究最佳充電方式是極有必要的。提高充電效率以及電池的利用率能夠對人們的生活提供極大的便利,比如說節約時間和成本。所以,本設計研究的基于模糊PID 控制的充電樁控制系統就是為了這一目的而展開的。雖然它可能不會永遠是最優方案,但它可以為之后的優化方案提供對照和思路。除了強調模糊PID這一算法之外,其他充電方式的選擇還有硬件電路的選擇對充電效率和電池利用率都有較大的影響。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
兒童故事畫報(2019年5期)2019-05-26 14:26:14
商周刊(2017年9期)2017-08-22 02:57:49
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
