基于無人機航拍的地質剖面三維建模方法研究
2021-04-24 09:07:22李瀟雨陳曉慧
科學技術創新 2021年9期
李瀟雨 陳曉慧
(西南石油大學地球科學與技術學院,四川 成都610500)
地質露頭的考察是地質研究中必不可少的部分,其記錄著豐富的地質信息。隨著三維化技術的發展,對地質露頭進行三維建模是野外考察的發展趨勢。隨著無人機技術的普及,以無人機航拍影像為基礎來建立三維露頭模型已成為地質建模研究的新方向。
前人在進行地質露頭時主要是利用三維激光掃描儀將地質露頭點云化(董秀軍,黃潤秋,2006);劉學峰等采用LIDAR 掃描儀結合高清數碼相機也對地質露頭進行了三維化,但三維激光掃描技術有著儀器昂貴、操作專業度高、架設條件嚴苛、采集耗時較長等缺陷;南京地質古生物研究所在2014 年采用全景圖展示與GBDB 數據平臺相結合的方式采集了野外露頭(侯旭東,樊雋軒等,2014),但未建立三維地質模型,難以從多角度精細觀察。基于前人的研究成果,本研究決定采用無人機航拍技術與桌面軟件相結合的方式進行研究,構建地質露頭的三維模型。
1 概述
目標剖面位于貴州省安順市關嶺縣永寧鎮(圖1),地處揚子準地臺黔北臺隆普安扭旋構造變形區,位于燕山期前形成的埡都-紫云古斷裂、陸良古斷裂,開遠-平塘古斷裂圍限的三角地帶。地質構造為黔西山字型構造前面弧的西翼,基本呈北西向45°展布,主要由一束大體平行的較緊密褶皺和逆斷層組成,僅西北部丙壩、崗烏有一部分呈東西向展布(沈誠,2014)。該剖面自下而上,除下三疊統夜郎組部分出露以外,出露下三疊統嘉臨江組、中三疊統關嶺組、中三疊統楊柳井組、中-上三疊統法郎組、上三疊統賴石科組。巖性主要以灰巖、白云巖為主夾細碎屑巖(孫俊,何妙玲等,2019),為淺海臺地沉積相區。本次研究主要層位為中-上三疊統法郎組主竹桿坡段與瓦窯段。
研究采用了傳統野外數據采集方式與無人機傾斜攝影技術相結合的方式展開,同時參考了大量前人的研究資料與文獻,在進行傳統的剖面實測時加入了無人機傾斜攝影測量。研究時重點對永寧剖面的下三疊統嘉臨江組、中三疊統關嶺組以及中-上三疊統法郎組進行了剖面實測,同時利用無人機進行了高空整體航測,隨后選取了三段出露較好的露頭進行局部精細航拍測量,共取得無人機傾斜攝影照片1500 余張,隨后即利用Pix4DMapper 軟件對航拍影像進行了后期處理,并生成了與野外露頭相匹配的三維模型(圖2)。

圖2 研究流程圖

圖1 研究區地理位置圖
2 無人機航拍
2.1 設備簡介
本次研究測量設備選用的大疆創新“悟inspire2”系列集成飛行器,同時搭載了“禪思ZENMUSEX5S”云臺相機。悟inspire2采用鎂鋁合金可變形機身,碳纖維機臂,從材料上實現了機身輕巧,在機身配置了兩軸FPV 攝像頭用作環境感知,可精準避開障礙物,同時具備較強的抗風能力,可在10m/s 的風速下穩定拍攝。禪思ZENMUSE X5S 云臺相機具有有2080 萬有效像素,結合悟inspire2 的CineCore2.0 高性能影像處理器可支持最高5.2K 分辨率的照片拍攝,呈像清晰,拍攝仰俯角范圍+40°至-130°,水平范圍±320°使拍攝更加容易。
地面遙控采用的悟inspire2 適配遙控器搭配輔助接收影像的iPadmini,最大可控半徑可達7KM,控制軟件使用IOS 系統的“Pix4Dcapture”軟件可規劃飛行航拍線、實時控制飛行狀態、手動拍攝等功能(表1)。
2.2 野外剖面航測
利用無人機搭載傾斜攝影相機野外露頭采集的過程中,主要獲取的是高精度像片數據和POS ( Positioning and Orientating System,定位定向系統)數據,其中POS 數據是集動態GPS 定位技術和慣性導航系統于一體的航空攝影測量系統,影像的空間位置可由GPS 測得,影像的角元素可由陀螺系統來測量(印森林,譚媛元等,2018)。根據Pix4Dmapper 對建模原始數據的要求,本次野外無人機采集操作軟件使用與Pix4Dmapper 建模軟件配套的Pix4Dcapture。采集共分為兩種方式:一是對于低精度總模型,采用網格式航拍,將移動端與無人機建理連接后,在Pix4Dcapture 移動端APP 中,使用矩形框選將研究區選中,隨之將生成覆蓋整矩形區域的歸往復采集航線,航線設計參照建模的精度要求,將以至少75%的前后疊置率和60%的側向疊置率來進行拍攝(圖3);二是對于局部高精度模型,采用環繞式航拍,在Pix4Dcapture 移動端app 上選定好拍攝目標體,圍繞拍攝目標體建立環繞航線,且每繞中心飛行5°-10°就需要進行一次圖像采集來保持圖像的疊置率。

表1 ZENMUSEX5S 云臺參數

圖3 航拍模式示意圖(Pix4D 官方教程有改動)
3 三維模型建立
在無人機完成原始數據采集后,首先需要人工核對相片是否滿足質量要求,對模糊的影像進行剔除并驗證是否需要對缺失嚴重部分進行重拍,待原始影像質量核驗完畢后即可將數據導入Pix4Dmapper,開始三維模型的建立。
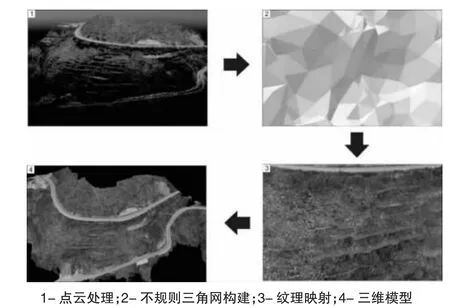
圖4 建模流程圖
航拍影像全部導入Pix4Dmapper 以后,軟件將會自動匹配攜帶POS 數據的影像中的參考坐標系,同時也可選著輸出結果的參考坐標系,本研究坐標系均選著WGS 84 坐標系。隨后軟件將對影像進行校正,選出特征匹配點并生成質量報告,報告中詳細評價了原始影像的質量情況、特征點匹配數量、相片矯正程度、參考坐標系等信息。根據自動預處理所選出的特征匹配點,軟件將根據相鄰影像匹配程度,利用算法將相片轉化為點云數據,實現不同影像的特征點匹配;隨后在密集點云的基礎上構建不規則三角網(TIN);最后再對細小的不規則三角網進行紋理映射,得到最終的三維實體模型,模型輸出采用FBX 格式(圖4)。剩余3 個局部高精度模型采用上述同樣的建模步驟,總共得到4 個三維實體模型。
4 結論
本文運用了無人機傾斜攝影測量技術,憑借無人機靈活便捷的優勢采集高分辨率影像,通過桌面軟件實現了三維模型的建立,讓考察不再局限于相片的單一角度與距離,對建立完善的三維地質露頭系統提供了新方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19
