一種基于特征互補的新型長期跟蹤算法
2021-04-24 09:05:10魏念巍
湖南城市學院學報(自然科學版) 2021年2期
夏 亮,張 亞,魏念巍
(安徽理工大學 電氣與信息工程學院,安徽 淮南 232001)
計算機視覺在日常生活及工業生產中作用突出,而目標跟蹤已成為該領域研究的重點方向之一,并被廣泛應用于安防監控、國防工業、自動駕駛和智能交通等領域[1].傳統的目標跟蹤算法在簡單環境下表現良好,但在目標遮擋、尺度變化、光照變化、背景雜波等干擾場景下,跟蹤效果嚴重不佳,因此,長期穩定的目標跟蹤算法是一個值得研究的課題方向.
目標跟蹤算法主要包含生成式和判別式2 種方式[2].目標跟蹤生成式算法主要對跟蹤目標特征進行建模,再搜索相似區域并估計出目標位置,其經典算法有Meanshift 和Kalman Filter.判別式跟蹤算法則是將跟蹤目標從背景中區分出來,經分類后得到跟蹤結果,具有快速、穩定的跟蹤表現.近年來,相關濾波跟蹤算法在目標跟蹤領域有著快速性和穩定性的良好表現,相應領域的研究也迅速展開.2010 年,Bolme 等[3]首次使用相關濾波進行目標跟蹤,提出了跟蹤器濾波(MOSSE)算法.Henriques 等[4]提出核相關濾波器(KCF)算法,使梯度方向直方圖特征(HOG)[5]結合核方法,并引入相關濾波,將特征用核技巧在高維空間進行表達,增強特征和濾波器穩健性.Li 等[6]提出的SAMF 算法融合了HOG 特征與顏色特征(CN),同時根據尺度特征估計目標的最佳尺度,其跟蹤精度比KCF 算法有較大提升.2016 年,Bertinetto等[7]通過構造2 個獨立的嶺回歸框架,提出了特征互補學習跟蹤算法(Staple),增強了系統在目標形變與快速運動等場景下的抗干擾性能.雖然Staple 算法具有較好的跟蹤性能,跟蹤速度也較快,但是當目標在被嚴重遮擋、超出視野、有相似目標干擾等場景下時,Staple 算法會出現目標丟失及模型漂移等狀況.
為了解決長期目標跟蹤過程中出現的以上問題,本文在Staple 算法基礎上,提出一種依賴丟失重檢測機制的長期目標跟蹤算法,對長期目標跟蹤過程中的目標丟失進行判斷,調用GMS 匹配算法[8]進行重檢測并對模板更新,使跟蹤器重定位初始目標,有效保持該跟蹤算法的穩定性與準確度.
1 Staple 跟蹤算法
Staple 算法分別用梯度方向直方圖特征和顏色直方圖特征來構建2 個獨立的濾波器[9],根據融合響應最大值確定對應的目標位置與尺寸,并在當前幀的跟蹤響應最大值位置提取表征對模板進行更新.
1.1 相關濾波器
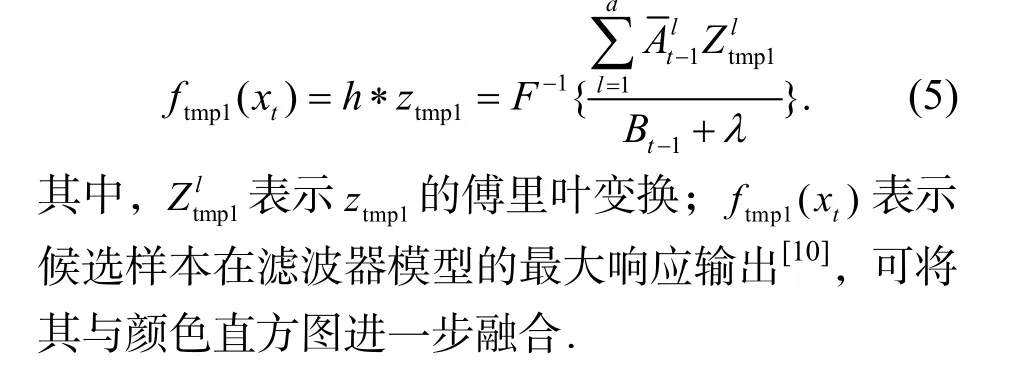
相關濾波器提取目標及其附近區域的HOG表征,f表示d維的特征構成樣本,根據嶺回歸方程得到的目標模型為
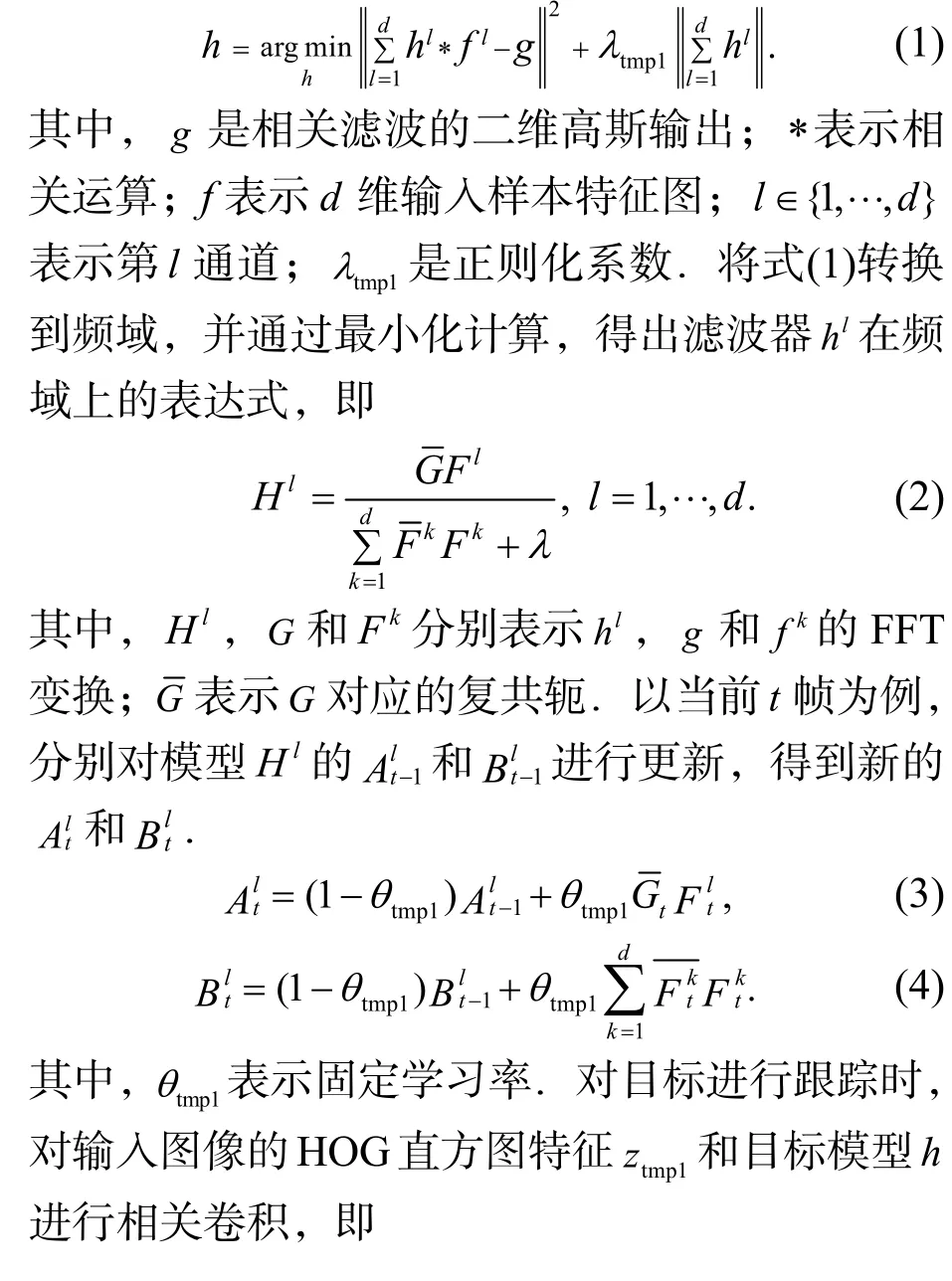
1.2 顏色直方圖
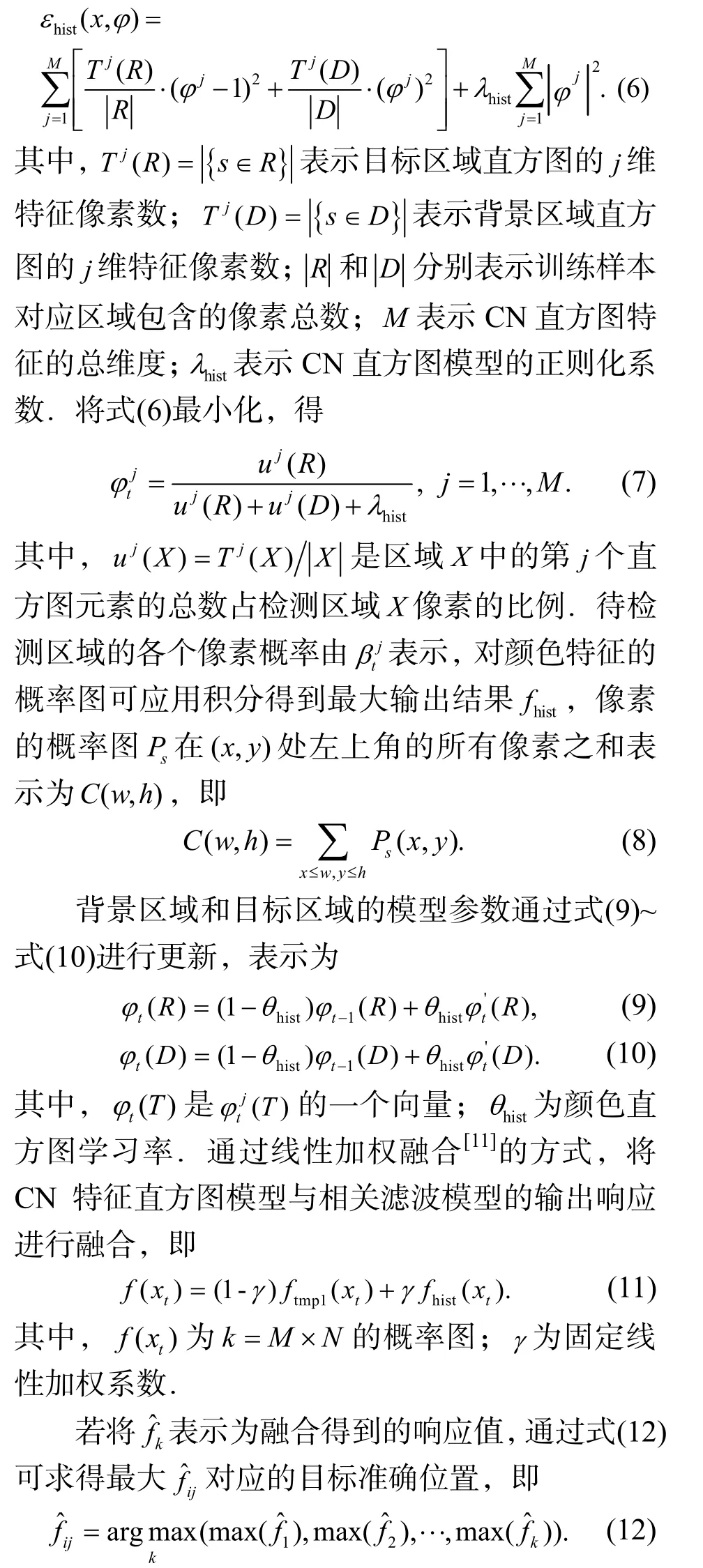
在訓練階段采用顏色直方圖判別器訓練模板φ,提取顏色特征,且目標在每個特征維度的損失函數為
2 長期跟蹤算法
通過設計一種基于特征匹配的重檢測模型,改善Staple 算法在長期目標跟蹤過程中的易受干擾而丟失目標的缺陷,使其對受遮擋、光照變化等影響具有更強的適應性,從而保持穩定地長期目標跟蹤.
2.1 基于特征匹配的重檢測
本文采用特征匹配算法(GMS)作為檢測器,該算法匹配目標的ORB 特征,對計算出的匹配成功的特征相似點部分進行過濾,并消除錯誤匹配部分,其基于網格運動統計的方式能夠快速、準確地對特征提取匹配[12].將目標圖像Im和候選匹配圖像It匹配的區域表示為m,t,iQ?Q為該區域之間的點集,考慮各個特征點匹配是獨立的,可近似認為鄰域匹配點數iρ為二次分布,即
其中,ix和iy為預匹配集中匹配對的坐標;n為匹配點集總數;iw為點匹配正確時周圍點的支持概率.根據匹配結果確定跟蹤目標位置,分別將該位置對應的圖像塊代入相關濾波器模型和顏色直方圖模型中計算,使跟蹤器初始化目標跟蹤.
2.2 算法步驟
所提出的基于特征互補和重檢測(Re_Staple)算法的步驟如下:
1)根據輸入初始幀圖像0x以及目標框,建立相關濾波器模型和顏色直方圖模型;
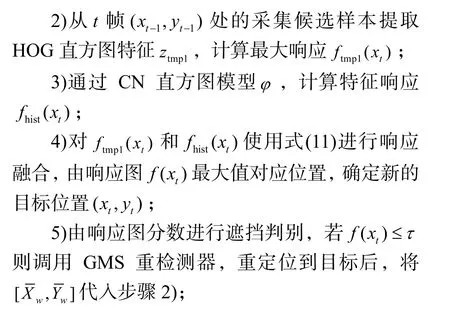
6)利用式(3)~式(4)更新當前幀的濾波器模型h,利用式(9)~式(10)更新顏色直方圖模型φ.
3 實驗對比分析
實驗配置為 Intel(R) Core(TM) i7-7700HQ(2.8 GHz)CPU,8 G 內存;算法平臺版本為Matlab 2018a,閾值τ選取為 0.18.選擇公開數據集OTB-2013,OTB-2015[13]和顏色跟蹤基準Temple Color-128[14]中的部分視頻序列,并對其在6 種不同的視覺干擾跟蹤場景(尺度變化(SV)、目標遮擋(OCC)、變形(DEF)和快速運動(FM)等)下進行分析對比,以驗證算法的魯棒性.
3.1 綜合性能評估
為有效評估基于特征互補學習與重檢測的長期跟蹤算法Re_Staple 的實用性,選取KCF,CSK,CT,Staple,LCT 和fDSST[15]等主流算法進行對比,結果如圖1 所示.
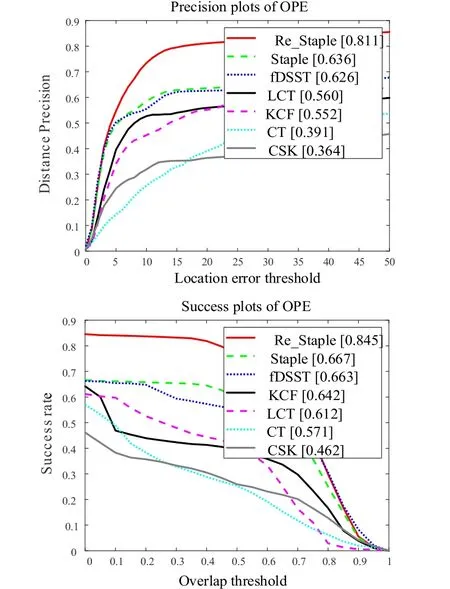
圖1 不同算法的精確度和成功率對比
圖1 為改進后的算法在一次通過評估(OPE)距離精度(DP)閾值為20 像素和重疊成功率(OS)閾值為0.5 條件下,與其他算法的對比結果.由圖1可以看出,所提算法的精確度為81.1%,相比于Staple 算法提升了17.5%;成功率為84.5%,相比于Staple 算法提高了17.8%;其精確度和成功率均優于其他對比算法,綜合性能表現優異.
表1 列出了幾種對比算法的一次通過評估距離精度、重疊成功率和速度的詳細對比結果.
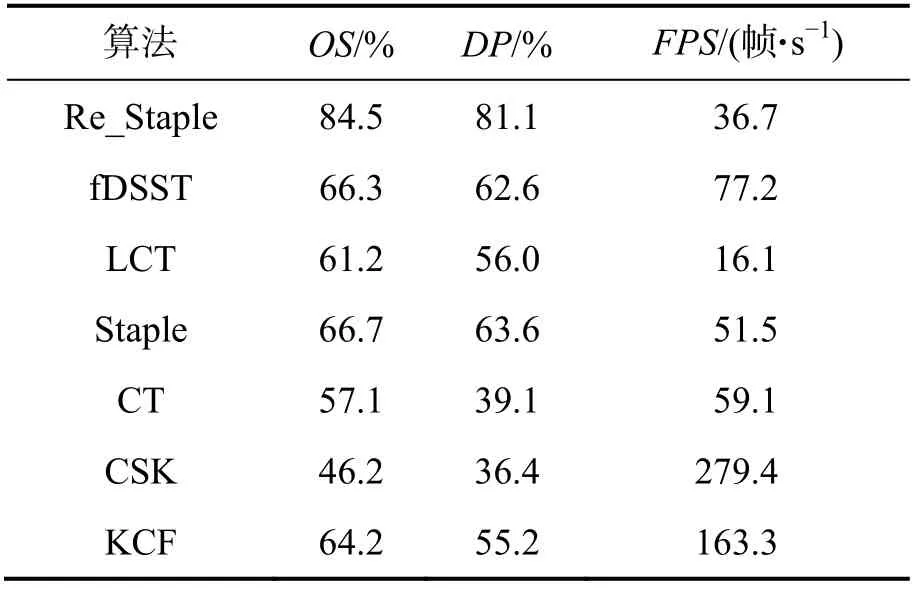
表1 各算法重疊率、平均精度和速度對比
從表1 可看出,改進后的算法綜合性能優異,整體的重疊率和平均精度都表現突出,并展現了36.7 幀·s-1的速度,相較于速度快但準確度低的CSK 算法更加實用,能滿足實際工程的需求.
3.2 不同場景下的算法性能分析
為充分對比在不同干擾環境下各算法的表現差異,實驗選取了尺度變化、目標遮擋、變形和快速運動等6 個場景,測試了所提算法的一次通過評估準確度,其結果如表2 所示.
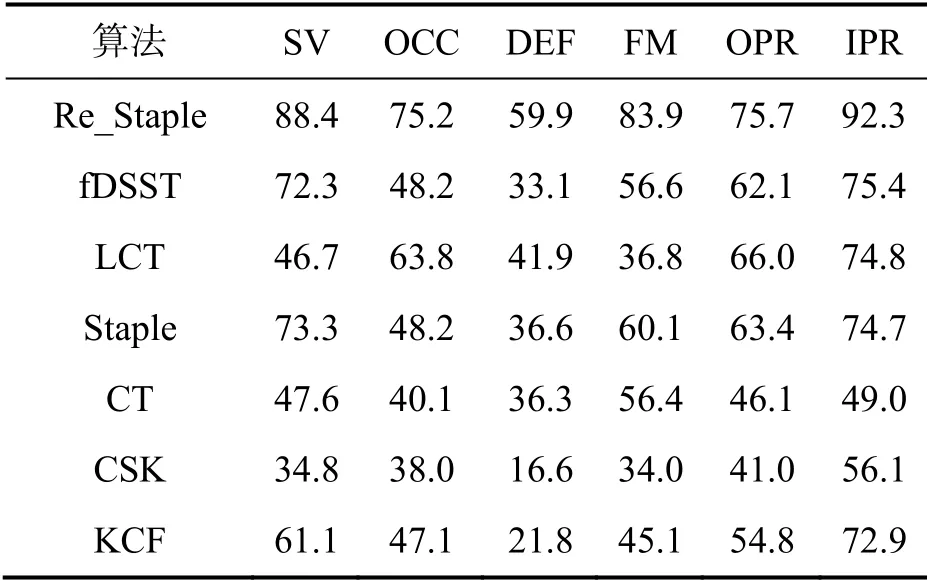
表2 不同場景下各算法性能對比 %
由表2 可知,本文所提算法在遮擋、尺度變化、快速運動等場景下表現優異.如在遮擋場景下,其準確度達到75.2%,相比Staple 算法提升了27.0%,性能上有著顯著改善.這說明采用特征融合的算法更能適應目標丟失的情況,對顏色變化明顯的干擾場景也有著良好的魯棒性.
3.3 遮擋重檢測性能測試
為進一步驗證所提算法在遮擋重檢測方面的性能,將改進前、后算法的跟蹤響應最大值曲線進行對比,選取2 個典型遮擋序列(Carchasing_ce1和jogging-1)進行測試,結果如圖2 所示.
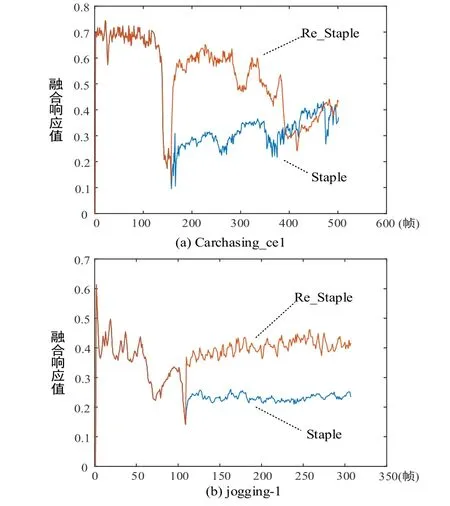
圖2 遮擋重檢測結果
由圖2 可知,在視頻序列Carchasing_ce1 的第143 幀和視頻序列jogging-1 的第70 幀,由于目標被障礙物遮擋,導致跟蹤器丟失目標,當目標重新出現的時候,Staple 算法并不能對目標穩定跟蹤,而改進的Re_Staple 算法可以重新找回丟失的目標,并對其長期有效地跟蹤,這驗證了所提算法對丟失目標具有良好的重檢測能力.
4 結論
為彌補傳統Staple 算法缺陷,在相關濾波和顏色特征模型的基礎上,使用基于網格運動統計的特征匹配算法(GMS)作為檢測器,通過對受遮擋和丟失目標的重檢測,重新定位到目標的確切位置,保證長期穩定地跟蹤目標.在公開數據集上驗證了所提算法的性能,綜合性能評估結果表明,其一次通過評估精確度為81.1%,重疊成功率為84.5%,均優于各對比算法;不同場景下的算法性能對比和遮擋重檢測測試結果表明,所提算法具有較強的顏色和尺度變化適應性,且在有遮擋和相似目標干擾等場景下,也能準確、穩定地對目標進行長期跟蹤.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19