差異化及路徑綜合優化的變電站機器人巡檢策略
2021-04-24 09:05:34楊京渝趙偉林
湖南城市學院學報(自然科學版) 2021年2期
楊京渝,彭 麗*,殷 亮,趙偉林
(1. 湖南城市學院 智慧城市能源感知與邊緣計算湖南省重點實驗室,湖南 益陽 413000;2. 國網湖南省電力有限公司 湘西供電分公司,湖南 吉首 416000)
隨著電網負荷的逐漸增加,電網規模也隨之擴大,傳統固定周期的巡檢模式難以適應目前設備大規模增長的現狀[1].為了提高巡檢質量及效率,避免人力、資金和時間的浪費,運營維護單位開始探索差異化巡檢模式.差異化巡視方法是綜合考慮設備的健康狀態、價值、重要程度等因素,因地制宜、動態確定不同的巡視周期和巡視內容[2].文獻[3]提出了輸電線路差異化的運維方法,在一定程度上解決了輸電線路運行與維護工作資源不足、管理粗放等問題;為提高線路巡檢質量,緩解巡檢人員缺員與日益增長的輸電設備的矛盾,文獻[4]提出了基于狀態評價的輸電線路差異化巡檢模式;文獻[5]提出了以設備分級為出發點,動態調整設備巡視周期和項目的差異化巡檢策略.以上差異化巡檢模式均具有很好的參考價值,但其研究的主要目的是為了解決在人工巡視中存在日益增長的設備與維護人員減少之間的矛盾,暫未在機器人智能巡檢中應用.
隨著泛在電力物聯網及5G 通信技術的發展,通過電力巡檢機器人對輸電、變電、配電環節實現全面的無人運維檢測已經成為我國智能電網運檢的發展趨勢.為此,變電站機器人巡檢路徑規劃問題也已開展了大量研究,機器人巡檢路徑規劃算法主要分為圖形搜索法、勢場規劃法和人工智能優化算法3 大類.人工智能優化算法相比于其他2 類算法應用更為廣泛,主要有Q-learning算法、蝙蝠算法、灰狼優化算法和遺傳算法.其中,遺傳算法相對于其他算法在路徑規劃方面的應用更為普遍,但該算法也存在諸多缺點:如有時會出現不收斂的情況,即使在單峰或單調條件下也是如此,易出現早熟、收斂速度慢、易陷入局部最優等.針對上述問題,為提高算法的全局搜索能力和收斂速度,文獻[6]在選擇操作中引入模擬退火思想的改進遺傳算法;文獻[7]對遺傳算子中的交叉算子和變異算子進行了改進,使遺傳算法的進化能力得到了改善.然而,目前變電站機器人巡檢的路徑規劃問題均只考慮了巡檢路徑最優,對站內所有設備“一視同仁”,未針對重要設備、隱患設備、重要用戶設備等進行優先巡視,從而導致因發現缺陷不及時而引發電網事故的不利局面.
基于上述分析,為綜合考慮變電站設備的差異化巡檢及巡檢路徑最優,筆者以設備分級為出發點,構建設備優先級巡視權重,并動態調整巡視路徑,對影響電網安全風險、狀態嚴重及關鍵的設備予以優先巡視,以實現重要設備的精準管控,從而降低電網運行風險.根據站內設備健康狀態和重要程度來確定設備的管控級別,建立全面、完善、科學的評級模型;以管控級別為依據,進行差異化巡檢,提升巡檢工作智能化、標準化和差異化水平;構建同時考慮設備優先級與巡檢路徑長度的優化目標函數[8-10].以某220 kV變電站為例,建立路徑規劃環境模型,結合遺傳算法對其進行規劃并尋找最優巡檢路徑.
1 設備差異化巡檢策略
以設備分級為出發點,對影響電網安全風險、狀態嚴重及關鍵的設備采取優先巡視,對運行工況較好、重要度低的設備則最后巡視,以便及時掌握和發現關鍵設備的缺陷和隱患,為檢修處理爭取時間,降低電網運行風險,確保電網安全穩定運行.依據設備健康度和重要度2 個維度來綜合判定設備的管控級別[11-12],并按照管控級別確定各類設備巡檢的先后順序.
1.1 巡檢設備管控級別
設備健康度主要根據變電設備的狀態評價與風險評估、家族性缺陷、存在重大隱患等將設備確定為嚴重狀態、異常狀態、注意狀態和正常狀態4 個等級;設備重要度主要結合電壓等級、設備價值以及對重要用戶供電情況將設備確定為關鍵設備、重要設備、關注設備和一般設備4 個等級.設備健康度和重要度的狀態等級及其判別依據如表1 所示.

表1 設備健康度和重要度的狀態等級及其判別依據
依據設備健康度和重要度2 個維度來綜合確定設備的管控級別,并建立設備風險矩陣,結果如圖1 所示.

圖1 設備風險矩陣
從圖1 可知,在設備風險矩陣中,變電站內所有一次設備可分為Ⅰ、Ⅱ、Ⅲ、Ⅳ 4 大類.其中,Ⅰ類設備存在風險的級別最高,因此其對應的管控級別也最高;Ⅳ類設備存在風險的級別最低,其對應的管控級別也相應最低;其次的管控級別為Ⅱ、Ⅲ類設備.
1.2 優先級巡檢原則
按照風險矩陣中的設備管控級別,確定設備巡檢優先級權重[13],將設備巡檢優先級從高到低依次分為1~4 共4 個等級.由圖1 可知,健康度為嚴重或異常的關鍵設備,以及健康度為嚴重的重要設備,其管控級別為最高級,設備優先巡檢的權重最高;健康度為正常的一般設備,其管控級別為最低級,設備優先巡檢的權重最低.
2 基于遺傳算法的巡檢路徑優化
變電站巡檢機器人能高效完成巡檢任務的前提是具有合適的路徑規劃,而遺傳算法具有簡單易用、隨機搜索和可擴展等眾多優點,其在路徑規劃中得到了廣泛應用.在遺傳算法中,其染色體編碼機制、適應度函數、遺傳算子、終止條件等基本要素的確定是運用遺傳算法求解最優路徑的首要任務.遺傳算法求解機器人巡檢路徑問題的步驟如下:
1)確定編碼方式.初始化種群,采用巡檢點序列編碼方式生成染色體(染色體為一條自起始點到目標點的可行路徑),并設置算法運行參數.
2)建立適應度函數.為了優化算法搜索的最終結果和改善算法的收斂速度,選取機器人行走的路徑長度的倒數作為適應度函數,即

popsize為種群中個體的數量;交叉操作采用部分映射雜交,如每對染色體a和b,先按交叉概率pc(交叉概率設置為0.9)隨機產生2 個交叉點q1=4和q2=7,并將2 個點的基因進行交換,用*代替交叉點兩端的基因片段中存在的重復數,再利用部分映射的數學原理完成*數字的替換,其具體實現過程為

變異操作依據變異概率pm(變異概率設置為0.1)隨機選取染色體上的2 個點q1=2 和q2=8,互換2點的基因數字位置,其實現過程為

4)設置終止條件,結束算法迭代,得到最優個體.遺傳算法的進化代數太大,種群過于早熟不可能再收斂;而進化代數太小,算法不容易收斂.因此,本文算法的進化代數取值為200,當達到最大代數時停止迭代,得到最優個體,最優個體(染色體)即為最優路線方案.
3 基于設備優先級的巡檢路徑優化問題建模
3.1 建模原則
變電站巡檢機器人考慮設備優先級的巡檢路徑規劃建模主要遵循以下原則:巡檢機器人以巡檢中心作為起始點和終止點;每個巡視點在單次任務中,巡檢機器人只經過1 次;巡檢機器人優先巡視優先級別高的設備;路徑規劃建模的目標是使巡檢路徑的行程最短.
3.2 建立目標函數
考慮設備優先級的巡檢路徑規劃目標函數可表示為

3.3 確定約束條件
巡檢路徑規劃目標函數的約束條件為:
1)機器人從巡檢中心出發,最后回到巡檢中心,即

2)每個巡視點在單次任務中,機器人只經過1 次,即


4 算例仿真與分析
4.1 環境模型
以某220 kV 變電站為例,建立環境仿真模型(如圖2所示).該變電站共設置62個巡檢點(不包括巡檢中心),以五角星表示巡檢點;設置好各區域設備的巡檢優先級.本例以設備的重要程度及電壓等級將變電站內的一次設備劃分為4 類優先級,其中,主變的優先級設置為1(巡視點五角星顏色為紅色);220 kV 設備區設置優先級為2(巡視點五角星顏色為綠色);110 kV 設備區設置優先級為3(巡視點五角星顏色為藍色);10 kV 設備區設置優先級為4(巡視點五角星顏色為黃色).

圖2 某220 kV 變電站巡檢模型示意
將變電站巡檢模型中62 個巡視點用平面直角坐標的形式表示出來,每個巡檢點對應一個坐標,如圖3 所示.進一步確定各巡檢點的序號和巡檢優先級別,如圖4 所示.

圖3 巡檢點平面坐標

圖4 巡檢點編號及優先級別
圖4 中的各數字分別代表巡檢點的編號和優先級,如48/1 表示巡檢點48 對應的優先級為1,21/2 表示巡檢點21 對應的優先級為2,2/3 表示巡檢點2 的優先級為3,60/4 表示巡檢點60 對應的優先級為4.本例中,巡檢中心的編號為1,每次巡檢任務只能從1 出發,最后回到巡檢中心.
4.2 仿真結果分析
為了驗證基于設備優先級的巡檢路徑模型的有效性,結合遺傳算法,利用Matlab 進行仿真實驗.將算法中初始種群大小設為100、最大進化代數設為200、交叉概率設置為0.9、變異概率設置為0.1.
從綜合考慮設備優先級和最短路徑的目標函數式(2)中可知:K為路徑長度加權系數,L為設備優先級的加權系數;在每次巡檢任務中,K L、取值的大小即決定了任務中路徑長度與設備優先級分別所占的權重.因此,為驗證基于設備優先級的機器人巡檢路徑規劃模型的正確性,進行了多次仿真實驗,且每次實驗中加權系數K、L的取值均不相同,并對每組加權系數取值進行反復實驗,在所得結果中取最優值進行統計分析.各組加權系數實驗的最優結果如表2 所示.

表2 不同加權系數路徑規劃結果統計


圖5 K=1,L=0 時路徑規劃

圖6 K=0,L=1 時路徑規劃



圖7 K=1,L=10 時路徑規劃
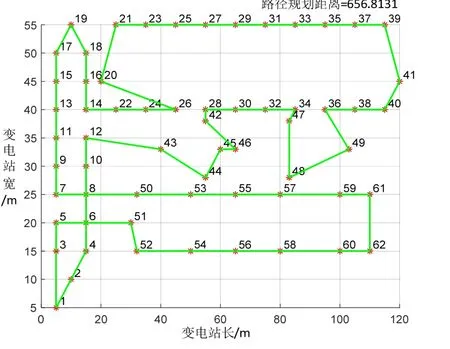
圖8 K=0.5,L=10 時路徑規劃
通過上述仿真實驗結果及分析可知,當不考慮設備優先級時,可得到巡檢路徑距離最短;當只考慮設備優先級時,巡檢路徑距離最長;當同時考慮巡檢路徑長度和設備優先級時,每次巡檢任務中巡檢路徑和設備優先級所占的比重取決于加權系數K和L的取值.因此,合理選擇兩者的取值,可以實現優先級別高的設備先巡視,同時保證路徑最優.
5 結束語
構建了同時考慮設備優先級與巡檢路徑長度的優化目標函數,通過合理選擇巡檢路徑和設備優先級的加權系數,實現了優先級別高的設備先巡視,同時還保證了路徑最優;建立了路徑規劃環境模型,利用遺傳算法對其進行規劃并尋找最優巡檢路徑;通過Matlab 仿真及數據分析,驗證了該模型的正確性,且其能夠滿足考慮設備優先級的機器人巡檢需求.
在變電站機器人巡檢中,通過設備優先級巡檢路徑規劃模型,可動態優化調整巡視路徑,對影響電網安全風險、狀態嚴重及關鍵的設備采取優先巡視,最終實現重要設備的精準管控,確保系統安全穩定運行.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
電子制作(2017年8期)2017-06-05 09:36:15
中國衛生(2016年2期)2016-11-12 13:22:16
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
中國工程咨詢(2016年4期)2016-02-14 07:28:28