基于數字散斑的大型機翼彈性形變測量技術
2021-04-24 03:02:28張吉璇馬曉東
中國測試 2021年2期
張 杰,張吉璇,馬曉東
(中國飛行試驗研究院測試所,陜西 西安 710089)
0 引 言
飛機氣動彈性、載荷試飛是民用飛機適航審定試飛的重要科目。受氣動力影響,機翼在飛行過程中會發生較大的動態彈性形變,影響飛機的升力、阻力、機體結構和操控性能,甚至危及飛機壽命和安全[1]。利用機翼形變數據可以分析大型飛機的結構負荷,評估飛機在飛行過程中的安全性,為分析和查找飛行隱患提供參考和依據。
在大型客機設計時,機翼可變彎度、氣動模型優化、結構載荷設計等都離不開飛行試驗中結構形變數據的準確獲取[2]。受限于測量場景,目前機翼形變測量方面的研究多為實驗室模擬仿真或風洞試驗采樣[3-4]。而飛行狀態下,因設備安裝位置、機體振動、機身空間基準構建等條件約束,機翼的動態曲面形變測量一直是飛行試驗中亟待解決的難題之一。本文采用基于數字散班的視覺測量技術,提出了攝像機捆綁組合標定、測量基準反解補償修正方法,解決了振動平臺下大型飛機柔性機翼飛行動態變形測量技術難題,有效保證了測量的精度,在新型號試飛中發揮重要作用。
1 機翼形變測量系統設計
C919飛機的機翼相對較大,單側機翼長度約19.4 m,在試飛過程中,需要獲取兩側機翼的彎曲和扭轉變形量。選取高于機翼的垂尾作為測量位置,并在機翼上表面及中央翼噴涂專用散斑圖案和測量標志,將中央翼測量標志作為測量參考基準,實時修正垂尾運動產生的測量偏差,采用上下兩組扇形相機陣列進行分段交會,實現整個翼面的變形測量,測量原理如圖1所示。
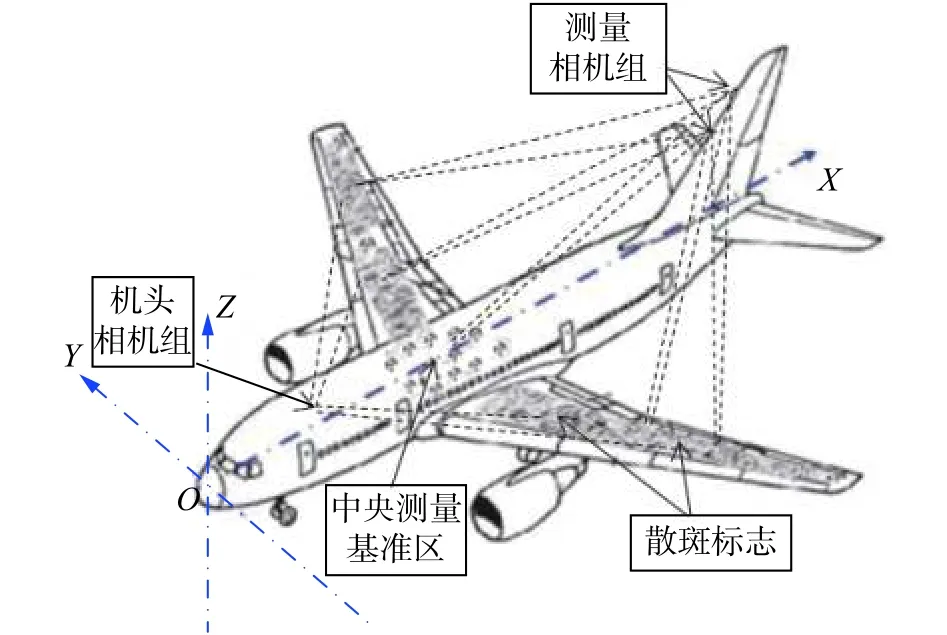
圖 1 機翼變形測量原理示意圖
在飛機垂尾前緣設計光學防護窗,安裝上下兩層測量相機,每層測量相機共有5臺,覆蓋整個機翼。每層中間的相機作為垂尾運動修正基準相機,其他上下對應相機相互之間構成立體交會模型。機頭水上應急出口加裝相機組,拍攝機翼前緣,測量機翼彎曲變形。
1.1 系統組成及功能
主要由高分辨率攝像頭、高分辨視頻采集記錄器、千兆網絡交換機、散斑及編碼標志、輔助配套設備等組成。
14臺高分辨測量相機通過觸發控制器的指令同步拍攝機翼的不同部位,影像傳輸至高分辨率視頻采集器。飛行結束后,根據3組相機的組合標定參數,對獲得的影像進行目標提取、相關分析、運動補償修正、空間位置解算等處理和分析,從而實現飛機機翼彈性變形的測量。
1.2 時間基準
為在事后數據處理得到同名影像,進行密集散斑點自動匹配,需嚴格控制采集記錄時影像的時間,因此采用IRIG-B時間作為各相機影像采集統一時間基準。系統采用GPS授時,將UTC時間轉換成標準北京時間作為時間基準,時間準確度優于1 μs。
1.3 空間基準及測量坐標系確立
為了將各相機交會結果統一至同一坐標系下,因此建立機體坐標系為測量坐標系,所有靜態校準數據、標志點的初始坐標數據、變形測量數據等統一納入機體坐標系統。利用飛機上的基準點定義變形測量坐標系,以機體坐標系為參考坐標系,定義飛機機頭為原點O,縱軸方向為X軸,機頭向后方向為正,Z軸垂直水平面向上為正,Y軸在水平面與其他坐標軸構成右手系,如圖1所示。
1.4 機翼形變測量流程
完成時間基準與空間基準的建立后便可以進行機翼變形測量,包括相機安裝與散斑標志點噴涂、空間控制點測量與組合相機標定、變形影像獲取與散斑標志點提取、密集點測量與機翼曲面擬合、結果顯示輸出等步驟,其具體流程如圖2所示。
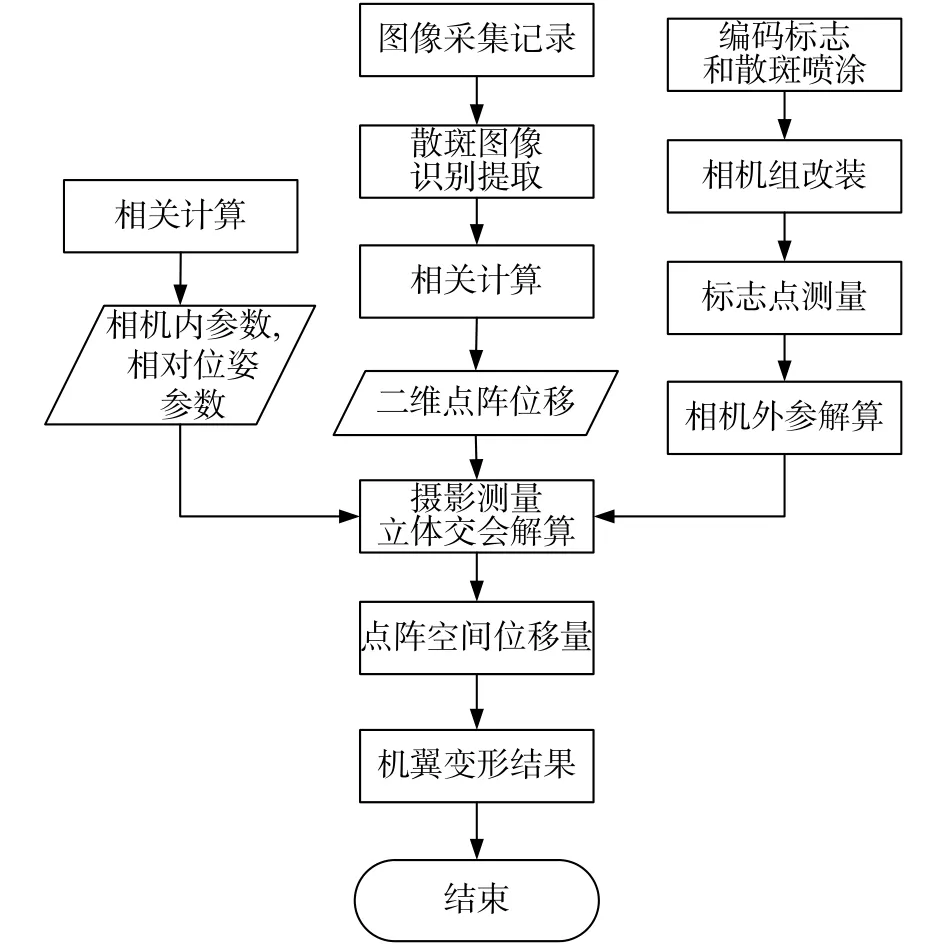
圖 2 機翼變形測量解算原理框圖
2 多攝像機組合標定與修正
采用5部相機構成相機組聯合測量,根據被測目標位置,這些相機之間的位置、光軸指向都不同,需要準確獲取每個相機自身的內參數、外參數,同時還需要獲取每個相機之間的位姿關系。本文采用基于攝影測量捆綁算法進行組合相機的自標定,建立室外大型控制場,利用高精度標校設備準確獲取各控制點的空間坐標,根據基于攝影測量的光束平差算法解算出相機的內、外參數,并得到各相機之間的相對關系,如圖3所示。
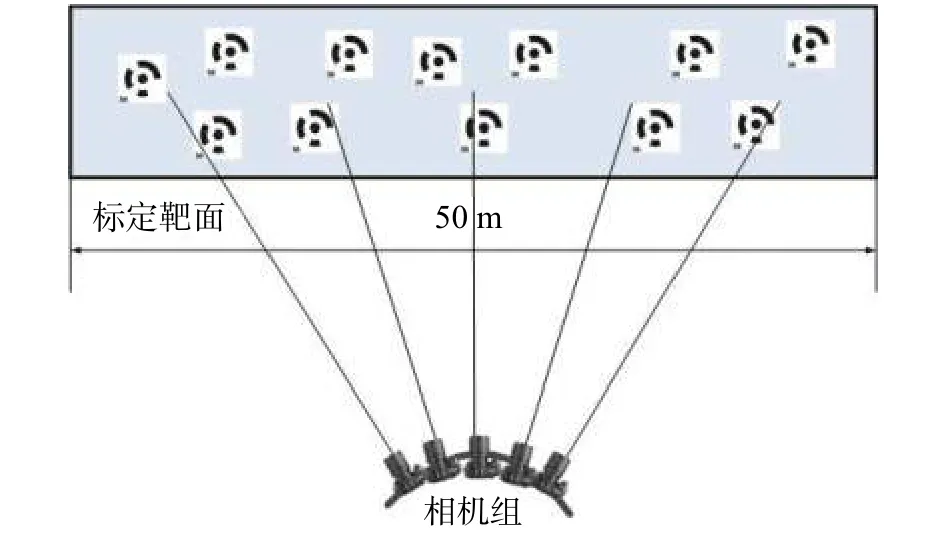
圖 3 組合相機捆綁標定原理
2.1 相機標定基本原理
測量前需要對鏡頭和相機構成的成像系統進行畸變參數標定,通過三維直接線性變換解算出相機的內外方位元素初值,利用光束法平差原理獲取畸變差,并引入共線方程[5]

其中fx、fy分別為x、y兩個方向的焦距,此處假設其有效值不相等。
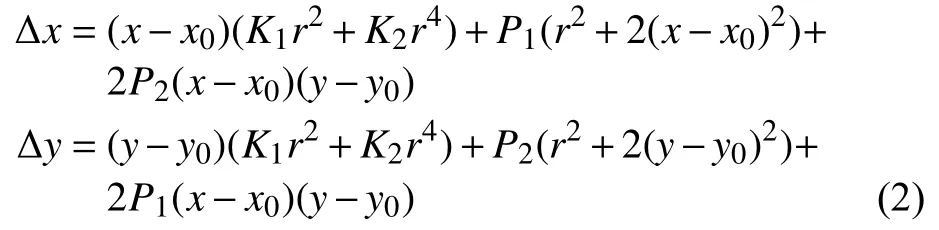
其中r2=(x-x0)2+(y-y0)2,K1、K2是光學成像系統的徑向畸變差,P1、P2是光學成像系統的偏心畸變差[6]。
用泰勒級數將式(1)進行線性化,即可得到用于檢校的誤差方程式:
最后列出各系數表達式,根據最小二乘間接平差原理,通過法化求解方法,反復迭代的求解,解算出該相機加裝鏡頭后的內方位元素參數。
2.2 外方位元素解算與反向標定
相機與測量坐標系的位置和姿態關系稱之為外方位元素[7]。通過在飛機上和地面設置靜態校準標志,測量其精確空間位置,利用標志點成像坐標計算出各相機在機體坐標系中的初始位置和姿態,建立各相機之間、相機與機體坐標系之間位置關系Xs、Ys、Zs、φ、ω、k,為機翼變形測量解算提供基礎數據。
由于測量機翼變形的相機加裝在垂尾上,在飛機飛行過程中相機會隨著垂尾的擺動和變形發生相對位置變化,因此必須對測量相機進行運動修正處理。中央翼區在飛行中變形小,可用來設置基準測量點,作為基準測量區域,利用空間后方交會的原理,解算得出相機位置及姿態的相對變化量,并且將同一位置的5部相機進行剛性連接,通過事先標校,即可修正其他相機的位置和姿態的變化量,最后在進行機翼變形參數解算中將該變化量帶入參與計算,從而達到消除相機抖動的目的,如圖4所示。
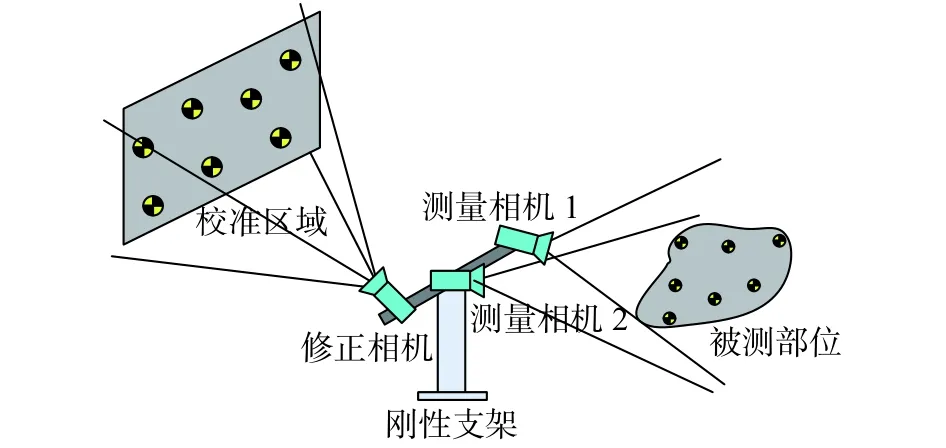
圖 4 測量相機運動修正原理示意圖
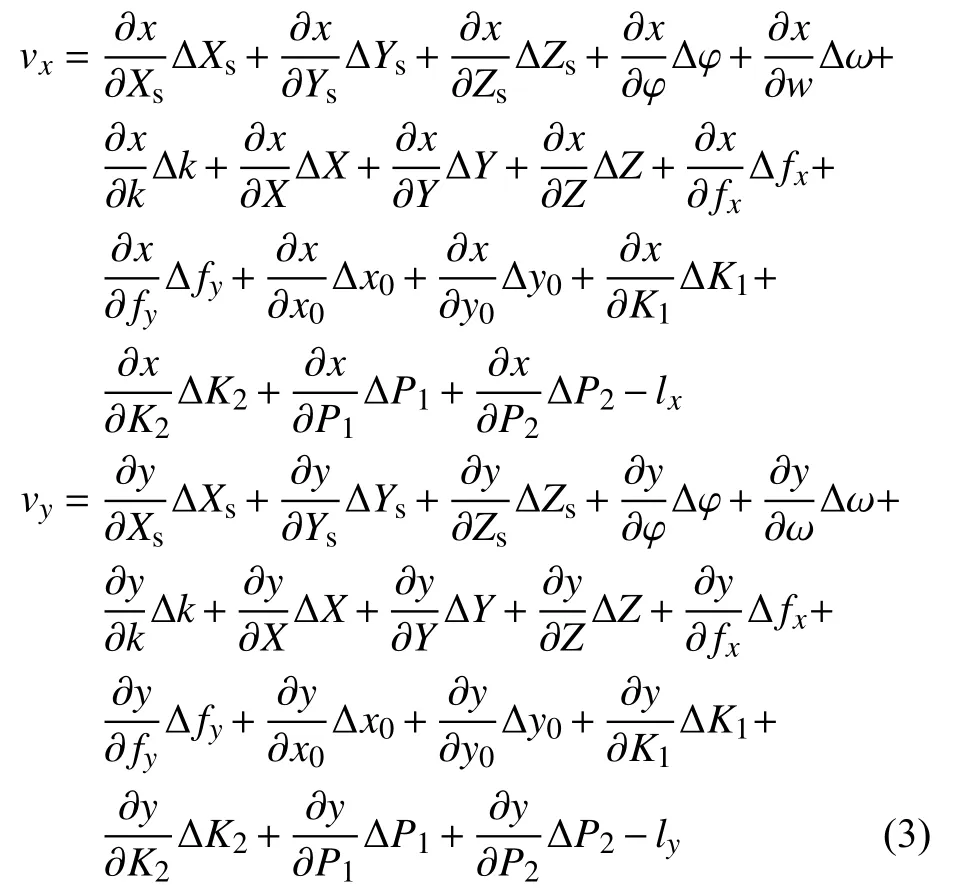
相機反標定主要為了獲取修正相機相對機體坐標系的位置和姿態,主要采用攝影測量學中的單像空間后方交會進行解算。每幅影像的內方位元素及控制點在測量坐標系中的空間位置已知,其誤差方程表示如下[8]:
式中:x、y——實際像點坐標;
(x)、(y)——不考慮畸變時的理想像點坐標。
直接線性變換解法是建立像點坐標和測量點物方空間坐標之間的直接線性關系的算法[9]。該計算模型擁有不歸心、不定向、不需要方位元素的起始值、適合于處理非量測相機所攝影像、適合標定畸變較小的相機、計算簡便快捷等特點。由于大部分相機中心區域鏡頭畸變較小,因此采用DLT算法引入一次徑向畸變為k1即可計算出中心區域內參數,引入畸變參數之后即可建立像點與物點的對應關系,如下式所示:

根據最小二乘求解原理可知,只需要6對同名點即可求出l1,···,l11,k1,求出l1,···,l11之后便可完成相機其余外方位元素初值的計算。
2.3 測量攝像機位姿修正
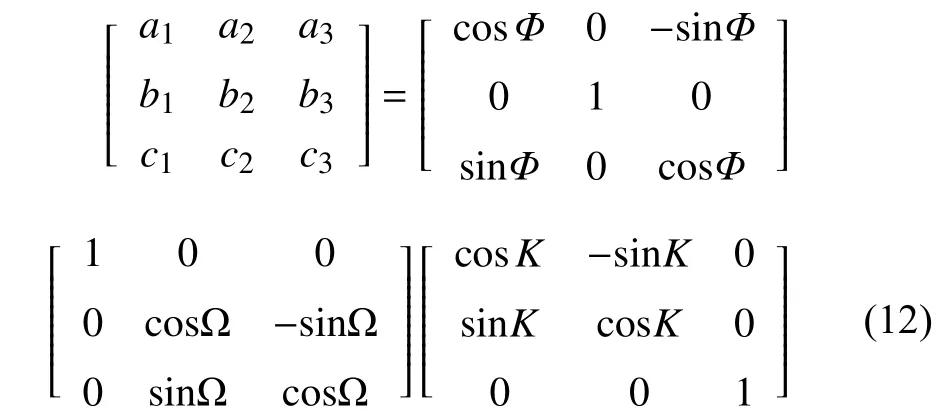
首先通過地面標校和解算,得到各測量相機與修正相機之間的相對位置、相對姿態參數;飛機飛行過程中利用基準點通過空間后方交會得到基準相機的位置和姿態變化量;通過空間變換關系對每臺測量相機的位置和姿態變化量進行修正計算,修正的數學模型如下:
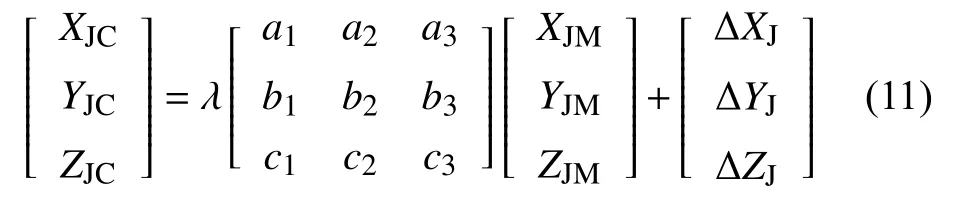
其中,XJC、YJC、ZJC為測量相機在飛機坐標系中的位置;XJM、YJM、ZJM為測量相機在標定坐標系中的位置;ΔXJ、ΔYJ、ΔZJ為修正相機的位移量;λ為坐標轉換系數,λ=1。
3 大傾斜角散斑圖像解算
3.1 數字圖像相關算法原理
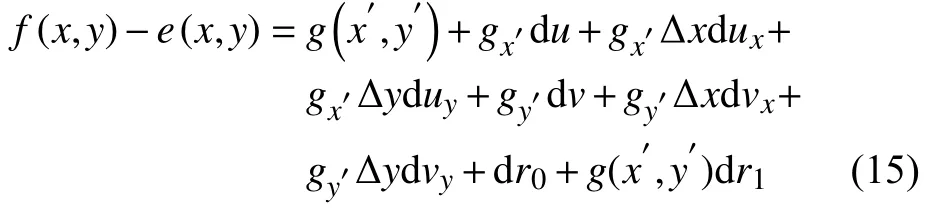
本文中采用一階映射函數進行圖像相關匹配,函數中含有平移、旋轉、正應變和剪切應變等分量[10]:

式中:u、v——變形后的位移量;
Δx、Δy——(xi,yi)與中心點的距離。
參考圖像中(xi,yi)與變形圖像中的灰度值相互關系可以表示為:

其中e(xi,yi)為噪聲,光照引起的灰度差異用r0,r1補償。
3.2 最小二乘影像匹配算法
通過粗匹配得到u、v的初值,對式(15)非線性迭代求解。

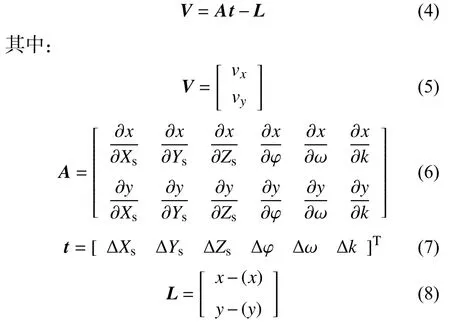
設l為觀察值向量,x為改正數向量,A為偏導數矩陣,n為子圖像像素數,誤差方程組可表示為[11]

其中,xT=[du,dux,duy,dv,dvx,dvy,dr0,dr1]。
根據最小二乘法求解方程可得:

所有觀察量相等時權值P為單位矩陣。
3.3 密集點前方交會與曲面構建
在完成同名點匹配之后,利用雙臺相機同時對同名點進行測量計算,可得到被測目標的三維坐標。與單臺相機相比,參數計算時具有冗余,可以進行數據平差計算,得到的軌跡精度更高,由于數據源的增多,測量實現的算法也更加豐富,具有較高的可靠性,此方案采用共線方程法。
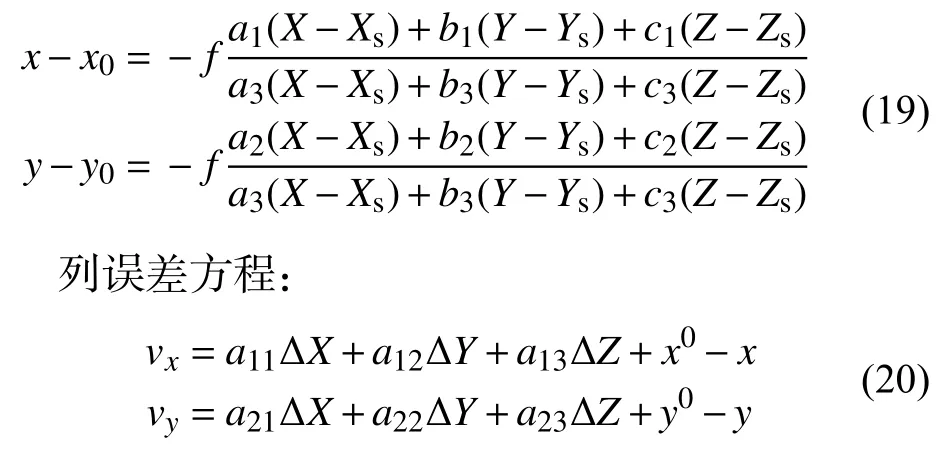
共線方程求偏導可得:a11、a12、a13、a21、a22、a23,初值X、Y、Z帶入共線方程解算可得到x0,y0[12]。
根據式(20)可知,一對同名點可列4個方程,4個方程根據最小二乘原理即可求出3個未知數X、Y、Z,得到格網內圓心空間坐標后,利用線性插值法即可將格網內的翼面擬合,重復以上步驟,逐一完成各格網點的擬合計算最終實現整個機翼的測量。
3.4 機翼形變解算
由于飛機空間結構限制,相機只能在垂尾前緣內架設,攝影光軸與被測目標的水平角度約10°,得到的影像存在較大變形。因此需要設計專用傾斜攝影標志及散斑圖形,通過仿真計算在水平角度10°的情況下拍攝扁率為0.8的橢圓其成像為圓形,如圖5所示。

圖 5 傾斜攝影標志及散斑圖形
散斑圖像解算(圖6)具體步驟如下:1)選取上下影像中機翼區域,將機翼區域影像劃成若干方形子區,構建格網,如圖6(a)所示;2)利用滑動窗口法逐一計算待匹配格網區域與基準影像的相關系數,遍歷整幅基準影像,得到相關系數最大的區域;3)對影像進行OTSU最大類間方差處理,得到二值化影像,邊緣提取,如圖6(b)(c)所示;4)利用hough圓形檢測提取兩幅影像中格網區域內所有散斑圓圓心,如圖6(d)所示;5)利用最小二乘影像匹配算法精匹配同名影像圓心像點坐標;6)前方交會測量,得到方形區域內所有圓心三維坐標;7)利用線性內插法擬合方形區域內機翼曲面,如圖6(e)所示。
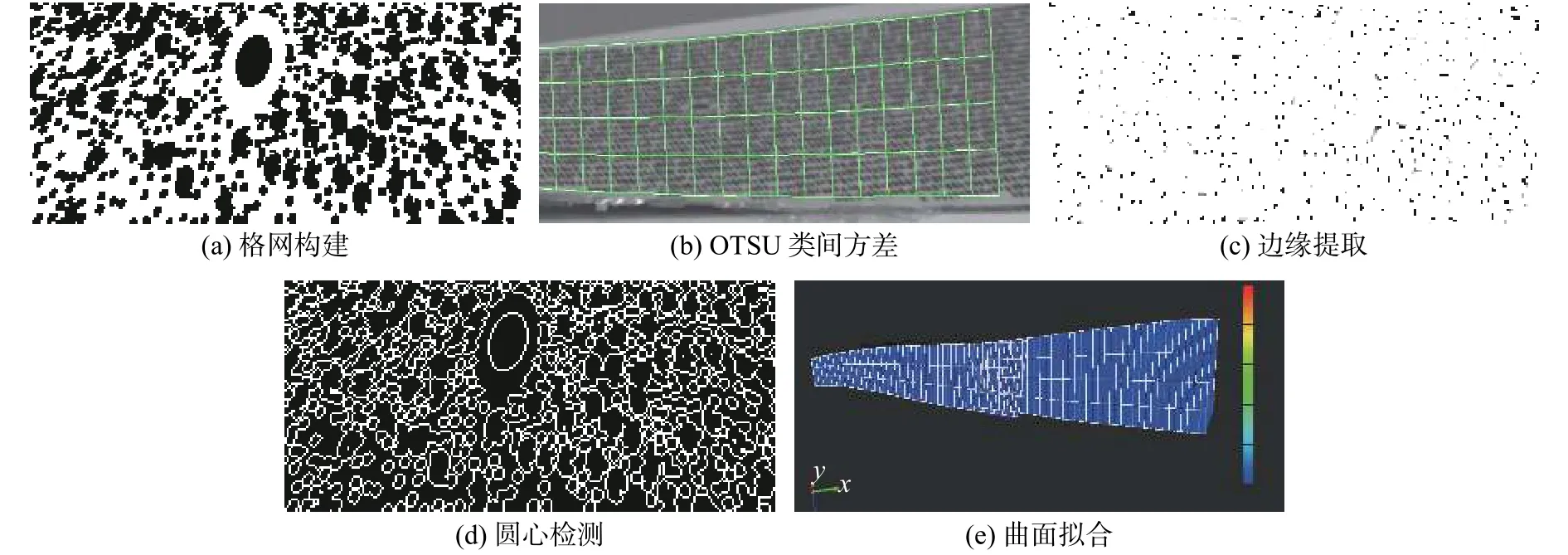
圖 6 散斑圖像解算
4 測量誤差分析
4.1 相機消抖誤差
測量中通過中央翼處設置的測量標志作為相機消抖的基準,利用攝影測量空間后方交會原理,通過基準相機獲取的標志影像反算相機陣在某一時刻的位置和姿態變化量。以某一相機陣為例,基準相機距離翼身結合處中心距離約25 m,翼身結合處寬度約為6 m,假設相機能夠覆蓋范圍為10 m,則相機視場角約為25°,相機分辨率為1 920×1 080,像元大小為 7.4 μm×7.4 μm,鏡頭焦距取f=24 mm,則根據空間后方交會精度估計方法,相機位置精度估計為:
式中:mxs、mys——攝像頭平面位置誤差;
mzs——相機光軸方向位置誤差;
m0——單位權重誤差,取±0.007 4 mm;
H——相機距離標志點的距離,取25 m;
r——正方形控制點的對角線的一半,取8.5 m。
測量相機位置精度為:

由于相機的覆蓋范圍為10 m,攝像頭分辨率為1 920×1 080,故一個像元分辨率約為5 mm。而反算的相機位置精度為mxs=mys=0.4 mm,mzs=0.03 mm,均小于一個像元的分辨率,因此相機位置精度影響可以忽略不計。
對于相機姿態變化帶來的影響,可通過下式進行估計:
計算可得方位角和俯仰角誤差為:mφ=mw=0.1°,滾轉角誤差mk=0.02°。根據機身標志點反算相機角度的精度,偏角、傾角、旋角最大誤差約為0.1°。取H=25 m,則反算相機位置帶來的測量誤差約為:M2=H×tanΔφ=43.6 mm。
4.2 靜態標定測量誤差
全站儀的單點定位測量精度小于2 mm,由于在測量中需要進行多站拼接測量、隱蔽點測量等,需要將所有測量數據轉換到統一的機體坐標系中,因此在轉換過程中還會存在誤差累計,根據大量測量實驗,誤差可控制在5 mm以內,即Mc=5 mm。
4.3 交會解算誤差
根據交會攝影測量模型,簡化精度解算,僅以兩主光軸角點的物方坐標為測量參考點時,α為相機光軸與X方向夾角,則相片偏角φ=α,H=lcosφ,,則:
假設兩相機的光軸交會距離像主點距離為l=25 m,基線B=4 m,鏡頭焦距f=24 mm,其中相片偏角φ=10°,(mx,my)為像素偏差量,取標志點判讀精度為1個像素,約7.4 μm,經過計算得:

對交會測量沿X方向(機身縱軸方向)的誤差相對較大,而另外兩個方向的解算精度較高。因此機翼變形上下彎曲的測量總誤差估計如下:
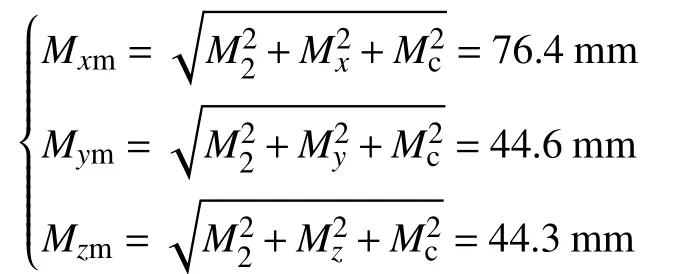
5 試驗與驗證
根據飛機實際尺寸,本文通過制作比例10∶1的飛機模型,在機翼上制作拉長的散斑和圓形標志點,對本文提出的方法進行實驗室驗證。由于機翼為對稱模型,本次實驗對象為半側機翼模型,采用6個相機組成單側機翼變形測量系統的測頭,見圖7。

圖 7 測量模型
使用6相機測頭,測量機翼三維全場變形數據,動態變形系統跟蹤機翼上圓形標志點變形信息,對三維全場變形數據進行對比檢測,靠近機背(左)側開始依次為1~5號點。以上散斑圖案與標志點均為CorelDraw排版并打印。采用6個相機組合,組成單側機翼變形測量系統測頭,采用2個相機組成動態變形檢測系統測頭。
標定得到6個相機的內參數,如表1所示,f為焦距,x、y為主點坐標,k1、k2、k3為徑向畸變參數,p1、p2為切向畸變參數,s1、s2為薄棱鏡畸變參數。
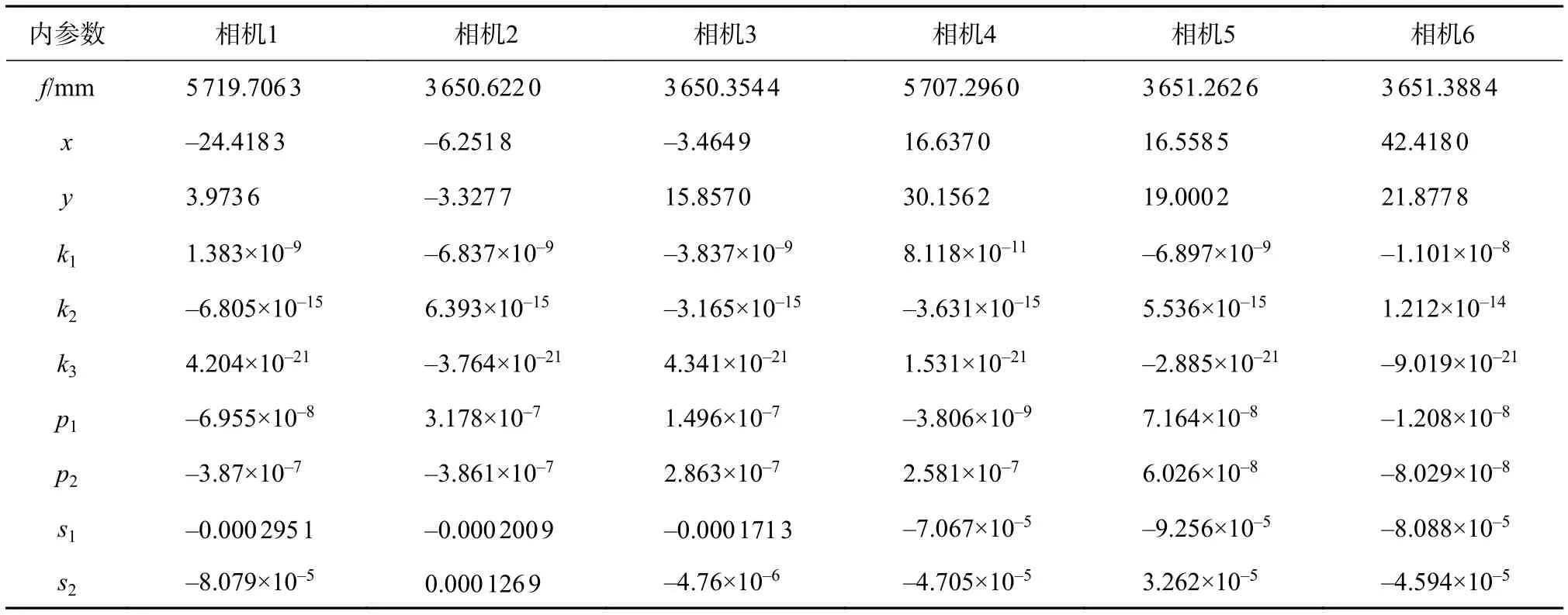
表 1 6相機測頭的內參數
模擬機翼變形,采集變形狀態,采用2個相機組成動態變形檢測系統,按照圓點編號對機翼上由內向外排列的1~5個圓點進行精度檢核,其中第二圓點位移變化過程如圖8所示。
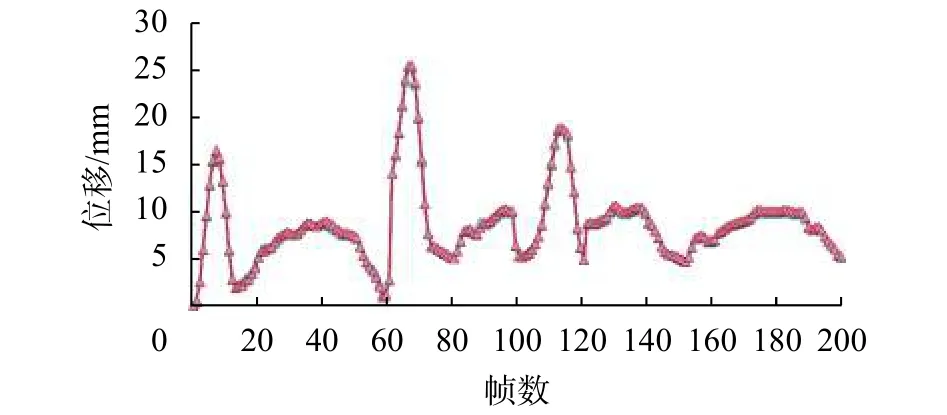
圖 8 第2個圓點位移變化過程
將本文中機翼變形測量系統對圓斑的測量結果與現有的雙相機檢測設備測量結果做對比,由于雙相機檢測設備的測量誤差主要來源于攝像機標定、立體標定、特征提取等方面,總體測量誤差均不超過2 mm,以地面光學設備實測結果為標準值,本文方法的單點位移測量準確度優于2 mm。
由于實驗中采用的是10∶1的縮比模型,其機翼尺寸完全按照10∶1進行縮小、翼面彎曲度等與原機相同。將本文方法應用在實際飛機上,根據測量原理中的式(20)推導過程可知,定位精度和像素當量的誤差值為線性求解關系,使用線性插值法計算時,測量圖像的像素當量應相應降低90%,則理論單點定位準確度優于20 mm。
6 結束語
國內大型客機的自主研發尚處起步階段,尚未開展結構變形實測驗證研究,急需一種有效測量方法并在實際飛行中獲取結構變形數據。本文借鑒國外成功案例,結合型號任務需求,采用基于影像測量的非接觸式測量方法,著重研究解決大型飛機飛行試驗中全翼面的彈性變形測量問題。其方法可應用于機翼氣動彈性變形量與理論設計值的符合性試飛,為研究飛機最佳巡航構形提供參考依據。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21