運(yùn)載火箭的一種自適應(yīng)姿態(tài)開環(huán)減載控制技術(shù)
2021-04-27 11:02:06匡東政
航天控制 2021年1期
關(guān)鍵詞:效果
修 觀 匡東政 李 鑫 薛 宇
上海宇航系統(tǒng)工程研究所,上海201109
0 引言
運(yùn)載火箭上升段飛行,需要穿越稠密大氣,遭遇較大的高空風(fēng)作用,形成較大的氣動(dòng)攻角和氣動(dòng)力,箭體在發(fā)動(dòng)機(jī)控制力以及氣動(dòng)力的共同作用下產(chǎn)生彎矩。氣動(dòng)載荷的大小一般可以用|qα|來衡量。運(yùn)載火箭的飛行減載技術(shù)是指使用彈道修正或主動(dòng)控制的方法,降低運(yùn)載火箭在高空風(fēng)作用下的載荷,提高箭體結(jié)構(gòu)強(qiáng)度的可靠性,也可減小箭體結(jié)構(gòu)質(zhì)量、提高運(yùn)載能力[1-2]。
彈道修正補(bǔ)償方法是指將具有統(tǒng)計(jì)規(guī)律的高空風(fēng)或射前測(cè)量的高空風(fēng)引入控制系統(tǒng),以補(bǔ)償高空風(fēng)對(duì)運(yùn)載火箭的影響。該方法的補(bǔ)償效果依賴于風(fēng)場(chǎng)數(shù)據(jù)的準(zhǔn)確性[3-4],難以有效應(yīng)對(duì)高空風(fēng)的實(shí)時(shí)變化。主動(dòng)減載控制方法是指使用實(shí)測(cè)的攻角或者法橫向過載作為反饋信息進(jìn)入控制系統(tǒng),使火箭箭體向氣流方向偏轉(zhuǎn),減小火箭飛行過程中的氣流攻角,降低氣動(dòng)載荷。
文獻(xiàn)[1-2]分析了攻角估算反饋控制[5]、加速度反饋控制的不同減載控制效果,表明基于加速度反饋的減載控制是目前最常用的減載控制方法。它采用自抗擾技術(shù),增強(qiáng)減載控制系統(tǒng)的抗干擾能力,提升減載控制效果。文獻(xiàn)[6]提出基于信號(hào)辨識(shí)得到箭體繞質(zhì)心的角加速度和慣組相對(duì)質(zhì)心的位置,再用慣組處的視加速度減去箭體繞心轉(zhuǎn)動(dòng)產(chǎn)生的線加速度,獲得箭體質(zhì)心處視加速度,滿足主動(dòng)減載所需測(cè)量信號(hào)的需求。
本文研究了運(yùn)載火箭的一種自適應(yīng)姿態(tài)開環(huán)減載控制技術(shù),用加速度計(jì)測(cè)量火箭的法向與橫向視加速度,用速率陀螺測(cè)量箭體繞質(zhì)心轉(zhuǎn)動(dòng)角速度,控制系統(tǒng)姿態(tài)回路開環(huán),俯仰通道跟蹤零法向加速度指令,偏航通道跟蹤零橫向加速度指令,使火箭轉(zhuǎn)到來流方向,實(shí)現(xiàn)減小氣動(dòng)載荷的目的。
1 主動(dòng)減載控制技術(shù)
對(duì)于氣動(dòng)靜不穩(wěn)定的火箭,在氣動(dòng)力矩與控制力矩平衡時(shí),氣動(dòng)力產(chǎn)生的法橫向視加速度與發(fā)動(dòng)機(jī)控制力產(chǎn)生的法橫向視加速度是同方向的,因此減小法橫向視加速度,能夠起到減小氣流攻角的同等效果,實(shí)現(xiàn)減小氣動(dòng)載荷。
考慮箭體俯仰通道的短周期運(yùn)動(dòng)方程[7]:
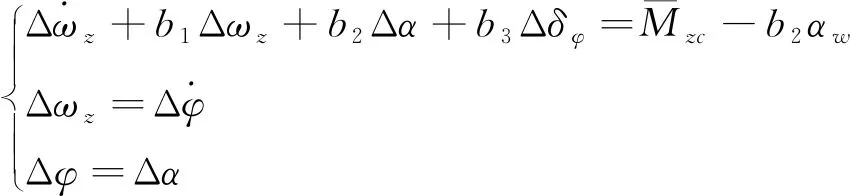
(1)
傳統(tǒng)姿態(tài)控制系統(tǒng)控制律為
(2)
考慮到加速度計(jì)測(cè)量信息為
(3)
基于視加速度的減載控制律一般取為
(4)
從上述基于視加速度的減載控制律可知,其在姿態(tài)角與視加速度兩者之間進(jìn)行權(quán)衡。當(dāng)a0不變時(shí),增大a3可減小氣動(dòng)載荷。但隨著a3增大,系統(tǒng)穩(wěn)定裕度降低[2],進(jìn)而影響減載控制效果。一般在靜不穩(wěn)定力矩最大時(shí)刻,取a3=b2/(b2k3-b3k2)使風(fēng)干擾對(duì)姿態(tài)角影響最小。當(dāng)a0=0時(shí)為載荷最小控制,此時(shí)系統(tǒng)運(yùn)動(dòng)不穩(wěn)定。
2 姿態(tài)開環(huán)主動(dòng)減載控制技術(shù)
針對(duì)基于視加速度減載控制律進(jìn)行改進(jìn),在保證系統(tǒng)運(yùn)動(dòng)穩(wěn)定時(shí)提高減載控制效果。本文提出在減載控制階段,控制系統(tǒng)不再跟蹤姿態(tài)角偏差,而跟蹤法橫向視加速度,其控制律更改為

(5)


開關(guān)模式工作方式可以通過預(yù)定時(shí)序進(jìn)行切換,一般在最大動(dòng)壓秒點(diǎn)附近的一段時(shí)間內(nèi),使控制系統(tǒng)切換到姿態(tài)開環(huán)主動(dòng)減載控制模式。為了使控制系統(tǒng)對(duì)風(fēng)的不確定性具有更強(qiáng)的適應(yīng)能力,設(shè)置自動(dòng)切換門限判別,開門閥值為ε2,關(guān)門閥值為ε1。由測(cè)量的視加速度來確定是否切換到減載控制。減載開門閥值ε2一般取減載控制系統(tǒng)作用下箭體能承受的最大視加速度。當(dāng)控制系統(tǒng)切換到減載控制模式后,為了確保運(yùn)載火箭在遭遇最大高空風(fēng)作用時(shí),減載控制仍起作用,關(guān)門閥值ε1取值應(yīng)當(dāng)遠(yuǎn)小于ε2。關(guān)門閥值ε1遠(yuǎn)小于ε2,也能使開關(guān)工作模式不頻繁切換,增強(qiáng)系統(tǒng)穩(wěn)定性。
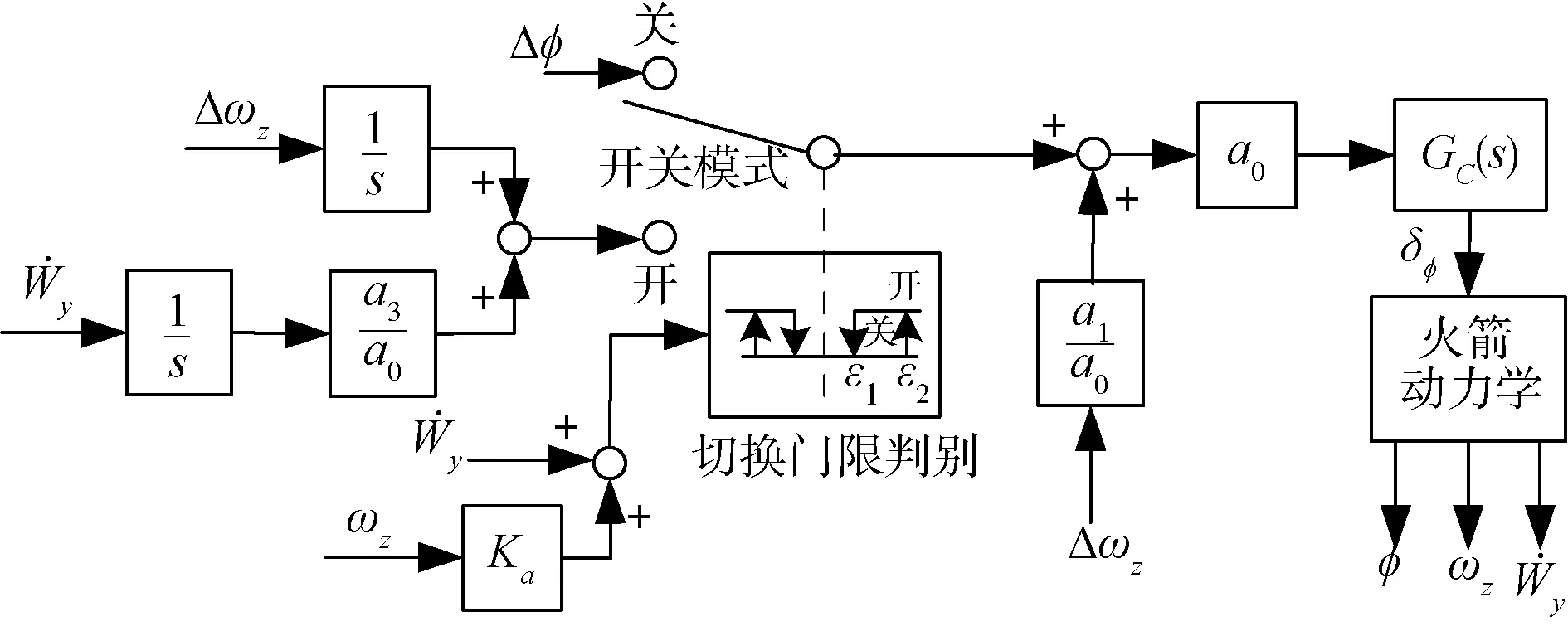
圖1 俯仰通道姿態(tài)開環(huán)主動(dòng)減載控制示意圖
3 減載效果分析和評(píng)估
以某型號(hào)液體運(yùn)載火箭為例,對(duì)純姿態(tài)控制、基于視加速度減載控制和姿態(tài)開環(huán)減載控制這3種控制技術(shù)進(jìn)行仿真分析研究,評(píng)估減載控制效果。
3.1 穩(wěn)定性分析
針對(duì)液體運(yùn)載火箭,控制系統(tǒng)穩(wěn)定性設(shè)計(jì),同時(shí)考慮剛體、液體晃動(dòng)、彈性振動(dòng)。箭體上安裝的慣性測(cè)量器件(慣組、加速度計(jì)、速率陀螺等)會(huì)敏感彈性振動(dòng),其輸出信號(hào)需要通過濾波處理后再進(jìn)入控制系統(tǒng)。本文采用慣組測(cè)量的視加速度進(jìn)行減載控制設(shè)計(jì)。以減載控制關(guān)注時(shí)間段中的71s為例,選取控制系統(tǒng)參數(shù),其中靜態(tài)增益a0=1.0,動(dòng)態(tài)增益a1=0.8,視加速度反饋系數(shù)a3=0.0158,校正網(wǎng)絡(luò)形式如文獻(xiàn)[2]中式(31)所示,3種控制系統(tǒng)穩(wěn)定性分析的Bode圖見圖2所示。圖2表明:純姿態(tài)控制系統(tǒng)剛體幅值裕度為11.73 dB,相位裕度為32.9°,且一階彈性相位穩(wěn)定,高階彈性幅值穩(wěn)定;基于視加速度減載控制系統(tǒng),彈性峰值顯著增大,導(dǎo)致一階彈性不穩(wěn)定,高級(jí)彈性幅值裕度很小;姿態(tài)開環(huán)減載控制系統(tǒng)剛體幅值裕度為9.07 dB,相位裕度為27.9°,且一階彈性相位穩(wěn)定,高階彈性幅值穩(wěn)定,其穩(wěn)定裕度與純姿態(tài)控制系統(tǒng)的相當(dāng)。
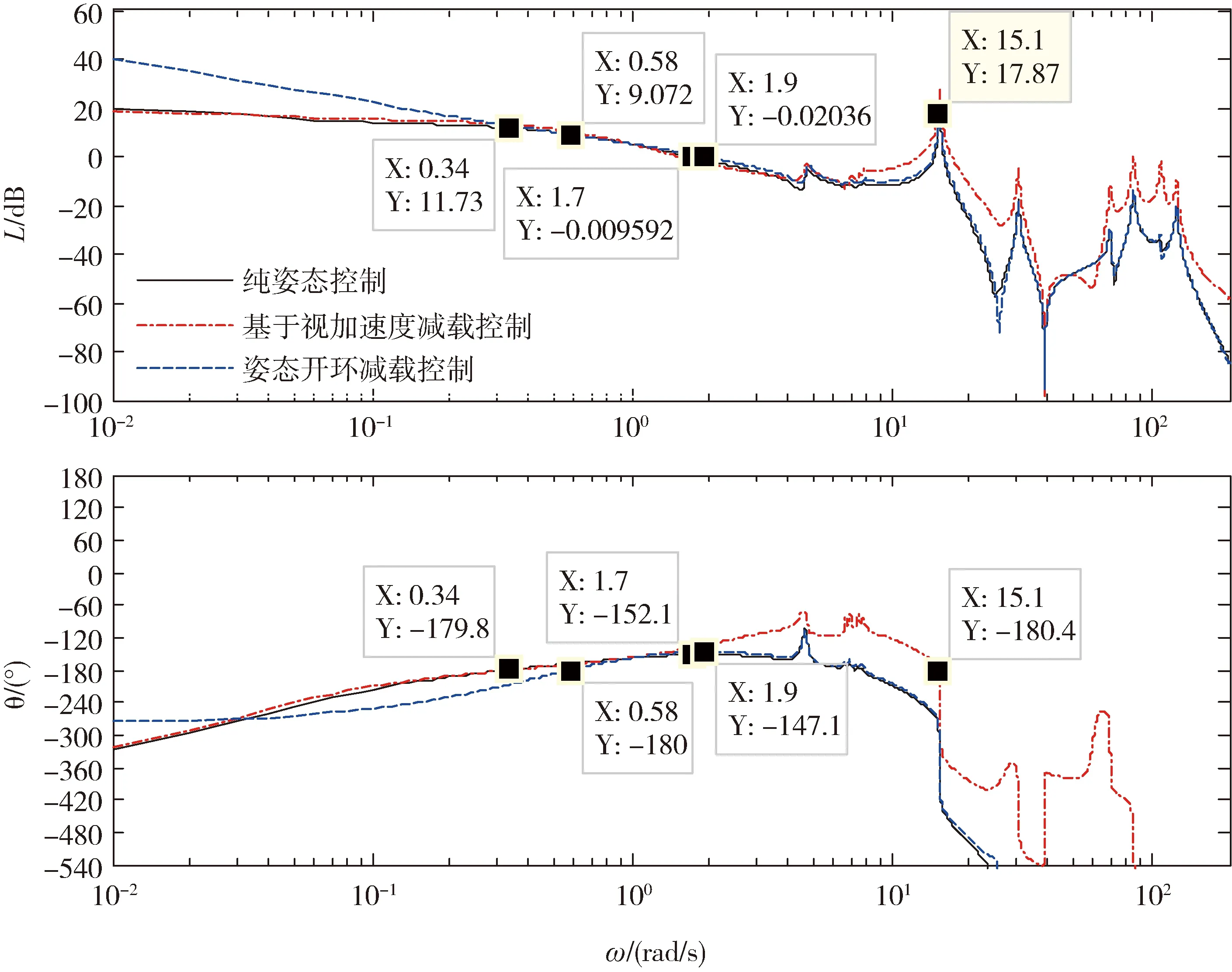
圖2 三種控制系統(tǒng)的Bode圖
3.2 減載仿真評(píng)估
以發(fā)射場(chǎng)某次實(shí)測(cè)的較大高空風(fēng)(圖3)仿真運(yùn)載火箭分別在3種控制系統(tǒng)作用下的飛行狀態(tài),同時(shí)比較2種減載控制技術(shù)相對(duì)與傳統(tǒng)純姿態(tài)控制的減載效果。|qα|、氣流攻角與側(cè)滑角、俯仰角與偏航角偏差、俯仰與偏航控制擺角、法向與橫向視加速度的仿真結(jié)果如圖4~圖8所示。
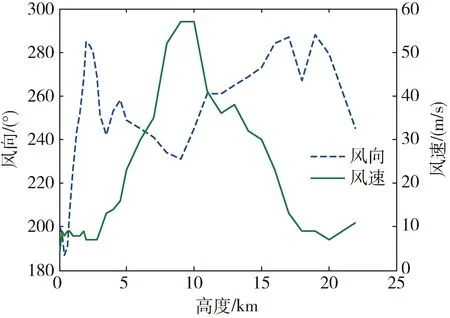
圖3 高空風(fēng)場(chǎng)
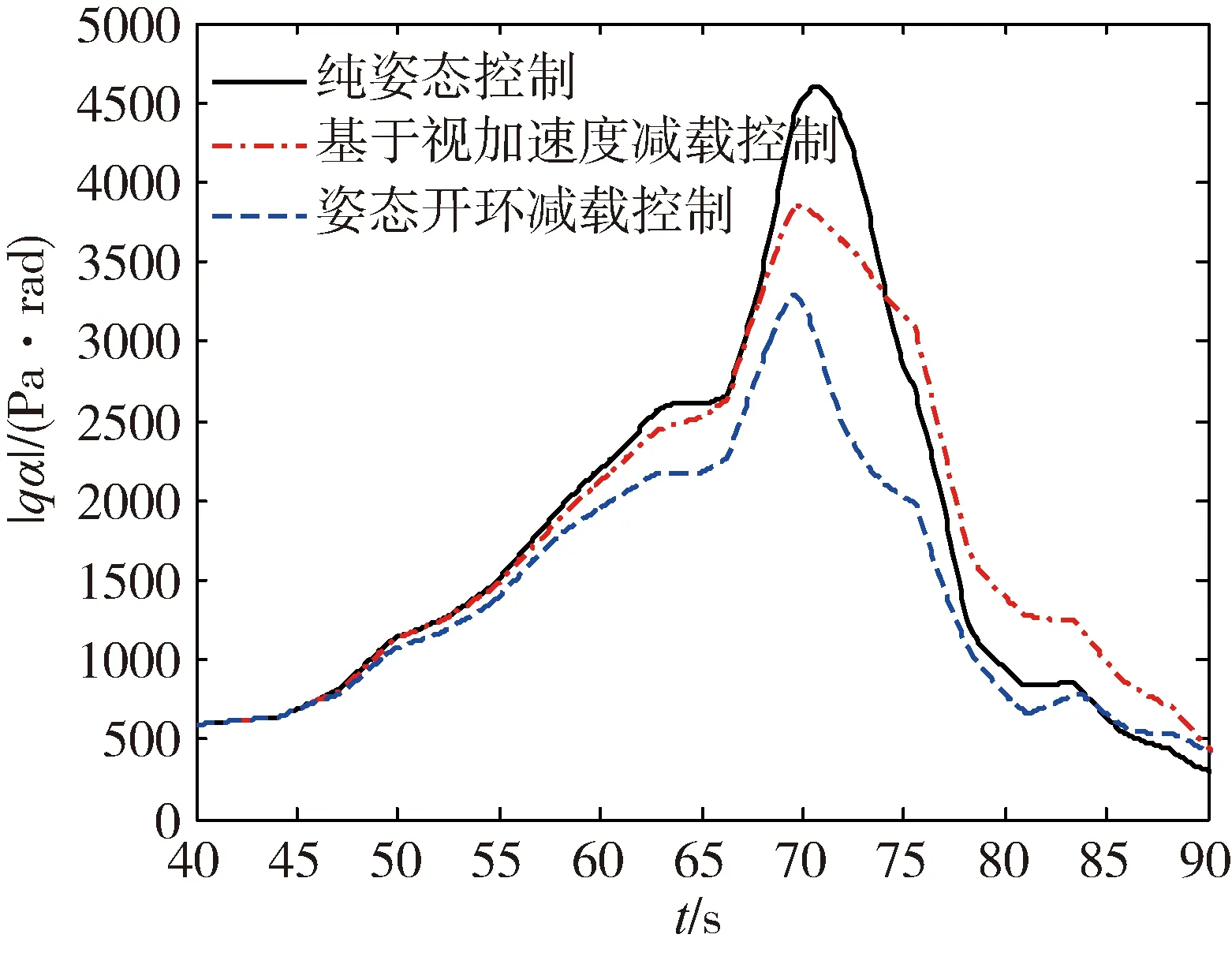
圖4 |qα|隨時(shí)間的變化
由圖4可見,減載控制技術(shù)可以降低氣動(dòng)載荷|qα|。設(shè)純姿態(tài)控制對(duì)應(yīng)的最大氣動(dòng)載荷為未減載氣動(dòng)載荷,并定義氣動(dòng)減載效果為:未減載氣動(dòng)載荷與減載后氣動(dòng)載荷之差除以未減載氣動(dòng)載荷。未減載氣動(dòng)載荷|qα|為4596 (Pa·rad),基于視加速度減載控制的氣動(dòng)載荷為3848 (Pa·rad),姿態(tài)開環(huán)減載控制的氣動(dòng)載荷為3296 (Pa·rad),則基于視加速度減載控制的氣動(dòng)減載效果為16.27 %,姿態(tài)開環(huán)減載控制的氣動(dòng)減載效果為28.28 %。相比于基于視加速度減載控制,姿態(tài)開環(huán)減載控制的氣動(dòng)減載效果顯著提高。由于姿態(tài)開環(huán),俯仰姿態(tài)角偏差和偏航姿態(tài)角偏差增大,且姿態(tài)角偏差的方向與純姿態(tài)控制的相反(圖6),正好使火箭箭體向來流方向偏轉(zhuǎn),減小氣流攻角和氣流側(cè)滑角(圖5)。當(dāng)然基于視加速度減載控制可使風(fēng)干擾對(duì)姿態(tài)角影響小的效果也體現(xiàn)在圖6中。
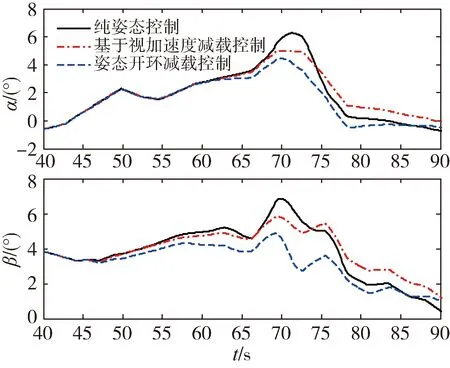
圖5 氣流攻角和側(cè)滑角隨時(shí)間的變化
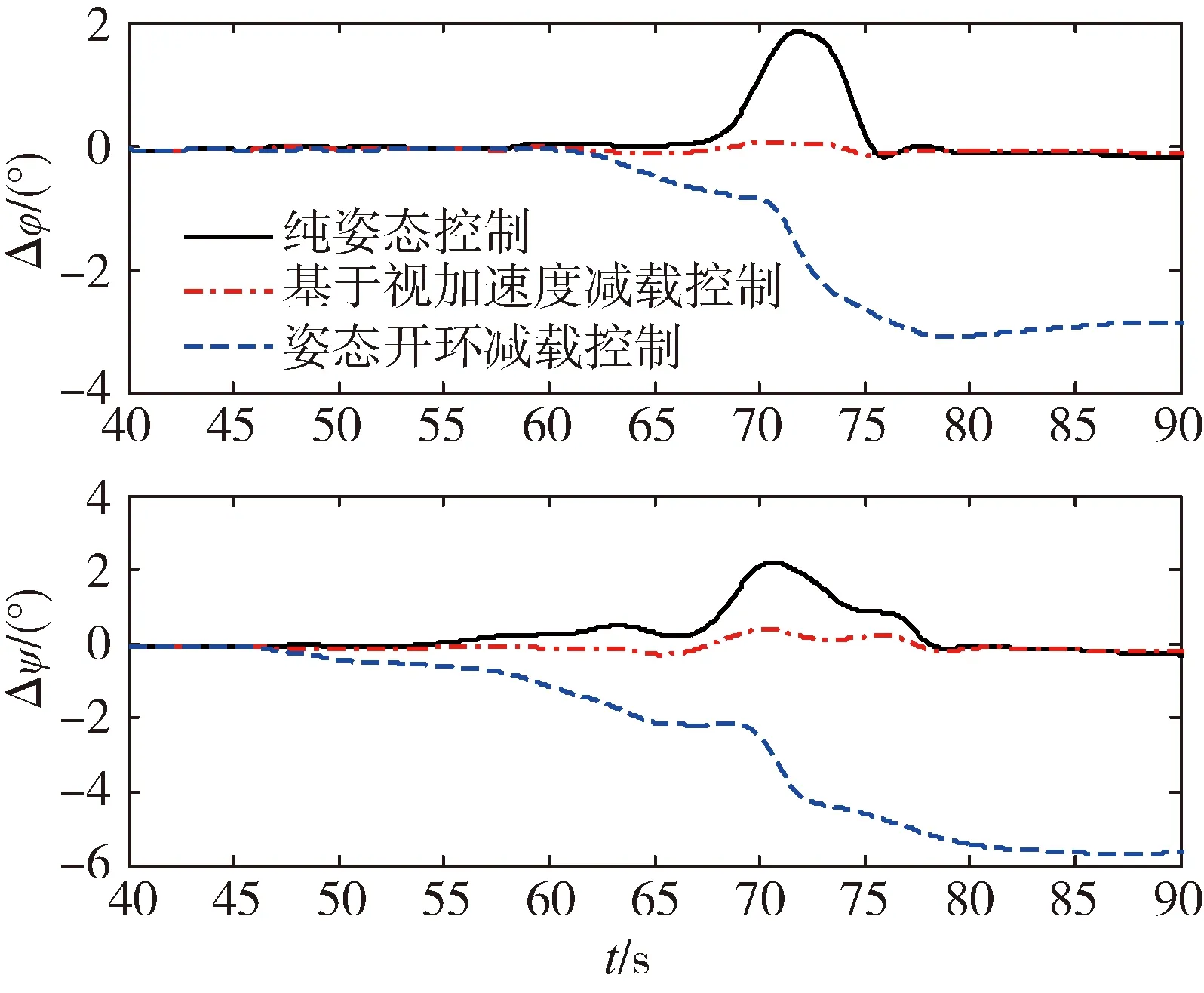
圖6 俯仰角和偏航角偏差隨時(shí)間的變化
對(duì)于只用發(fā)動(dòng)機(jī)搖擺實(shí)現(xiàn)控制的運(yùn)載火箭,可以用發(fā)動(dòng)機(jī)相對(duì)于箭體質(zhì)心的控制力矩來表征其控制載荷。當(dāng)發(fā)動(dòng)機(jī)到箭體質(zhì)心的作用力臂相同時(shí),可進(jìn)一步用發(fā)動(dòng)機(jī)控制擺角的大小表征其控制載荷的大小。由圖7可知,姿態(tài)開環(huán)減載控制的俯仰控制擺角和偏航擺角幅值最小,因此姿態(tài)開環(huán)減載控制的控制載荷也最小。
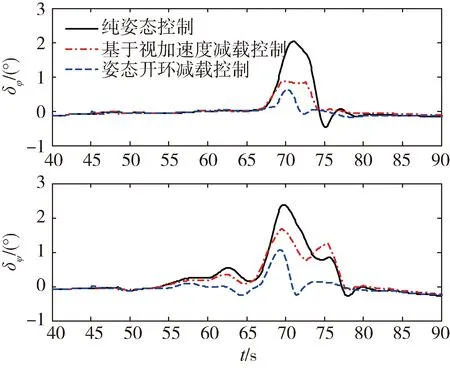
圖7 俯仰和偏航控制擺角隨時(shí)間的變化
綜上可知,3種控制系統(tǒng)中,姿態(tài)開環(huán)減載控制的氣動(dòng)載荷和控制載荷都最小,所以姿態(tài)開環(huán)減載控制的減載效果顯著。
由圖8可知,姿態(tài)開環(huán)減載控制的法向視加速度與橫向視加速度幅值也顯著減小。這是因?yàn)閷?duì)于氣動(dòng)靜不穩(wěn)定的運(yùn)載火箭,氣動(dòng)力產(chǎn)生的法橫向視加速度與發(fā)動(dòng)機(jī)控制力產(chǎn)生的法橫向視加速度是同方向的,因此減小法橫向視加速度可實(shí)現(xiàn)減載效果。這也是本文提出姿態(tài)開環(huán)減載控制的思路。

圖8 法向和橫向視加速度隨時(shí)間的變化
4 結(jié)束語
相比于傳統(tǒng)純姿態(tài)控制,基于視加速度減載控制的運(yùn)載火箭減載效果受到系統(tǒng)穩(wěn)定性影響限制,氣動(dòng)減載效果僅能達(dá)到16.27 %。本文提出的姿態(tài)開環(huán)減載控制,在減載控制階段,不再跟蹤姿態(tài)角而跟蹤零法向和橫向視加速度指令,對(duì)系統(tǒng)穩(wěn)定性影響更小,增強(qiáng)了減載控制能力,氣動(dòng)減載提高到28.28 %。本文也提出了一種切換門限判別模式,提高了減載控制系統(tǒng)對(duì)異常高空風(fēng)的適應(yīng)能力,具有一定的工程應(yīng)用價(jià)值。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學(xué)生學(xué)習(xí)指導(dǎo)(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫(yī)藥科學(xué)(2015年19期)2015-02-27 12:33:11