基于事件驅(qū)動(dòng)的航天器姿態(tài)自適應(yīng)跟蹤控制*
2021-04-27 11:02:54林子杰陸國(guó)平吳寶林
航天控制 2021年1期
關(guān)鍵詞:設(shè)計(jì)
林子杰 陸國(guó)平 呂 旺 吳寶林
1.上海衛(wèi)星工程研究所,上海 201109 2.哈爾濱工業(yè)大學(xué)衛(wèi)星技術(shù)研究所,哈爾濱150001
0 引言
近年來(lái),低成本的即插即用小型航天器受到廣泛關(guān)注。即插即用技術(shù)簡(jiǎn)化各個(gè)模塊的安裝,各個(gè)模塊間通過(guò)無(wú)線網(wǎng)絡(luò)連接。無(wú)線通信相較傳統(tǒng)電纜通信有許多優(yōu)點(diǎn),但低成本的小型航天器在無(wú)線的數(shù)據(jù)傳輸網(wǎng)絡(luò)中更容易造成數(shù)據(jù)丟失和時(shí)延的現(xiàn)象。因而,各個(gè)模塊之間數(shù)據(jù)交互帶來(lái)的通信帶寬受限必須在衛(wèi)星分系統(tǒng)設(shè)計(jì)階段就要考慮[1]。
將通信資源約束與航天器姿態(tài)控制結(jié)合,過(guò)去學(xué)者們提出了諸如輸出反饋控制[2]、量化控制[3]等方法來(lái)減少姿控分系統(tǒng)數(shù)傳量。近年來(lái)事件驅(qū)動(dòng)控制(Event-Triggered Control,ETC)逐漸進(jìn)入航天器姿態(tài)控制學(xué)者的視野。目前工程中航天器姿態(tài)控制常用定步長(zhǎng)的時(shí)間觸發(fā)控制(Periodic Time-Triggered Control,PTTC),然而在狀態(tài)量變化不大的時(shí)刻對(duì)控制器更新會(huì)占用不必要的通信資源。事件驅(qū)動(dòng)是一種變周期的控制策略,通過(guò)設(shè)計(jì)事件驅(qū)動(dòng)的觸發(fā)條件,僅在觸發(fā)條件滿足時(shí),控制指令才會(huì)更新,能有效減少通信頻率,減小總線帶寬負(fù)載壓力。
目前已有的事件驅(qū)動(dòng)在航天器控制方面的研究主要為姿態(tài)協(xié)同中星間通訊受限問(wèn)題或者單星穩(wěn)定控制的研究,而姿態(tài)跟蹤控制研究較少。文獻(xiàn)[4]應(yīng)用事件驅(qū)動(dòng)的算法,有效解決了編隊(duì)姿態(tài)協(xié)同控制飛行中連續(xù)通信帶來(lái)的能源消耗問(wèn)題。文獻(xiàn)[5]給出事件驅(qū)動(dòng)在單個(gè)剛體航天器姿態(tài)穩(wěn)定控制中的應(yīng)用。文獻(xiàn)[6]從信息物理融合的角度,研究星上嵌入式系統(tǒng)通訊帶寬受限時(shí)的姿態(tài)控制問(wèn)題,文中定義的相對(duì)負(fù)載的概念為航天器控制分系統(tǒng)的通信資源提供了一種評(píng)估方法。文獻(xiàn)[7]將自適應(yīng)容錯(cuò)控制與事件驅(qū)動(dòng)結(jié)合,能夠在容錯(cuò)控制的同時(shí)節(jié)約通信資源,但針對(duì)的是航天器穩(wěn)定控制任務(wù)。
另一方面,由于燃料消耗和星上機(jī)構(gòu)運(yùn)動(dòng)等原因,動(dòng)力學(xué)參數(shù)不能精確可知,工程中通過(guò)參數(shù)辨識(shí)的方法對(duì)不確定慣量參數(shù)辨識(shí)[8],再根據(jù)辨識(shí)結(jié)果進(jìn)一步對(duì)PID控制器參數(shù)進(jìn)行整定。由于“先辨識(shí)再控制[9]”的思路會(huì)占用時(shí)間資源,因此學(xué)者們?cè)趥鹘y(tǒng)的PD反饋控制[10]基礎(chǔ)上提出了更多智能算法以解決精確慣量未知情況下航天器直接進(jìn)行姿態(tài)控制的問(wèn)題。文獻(xiàn)[11]考慮干擾與模型不確定影響,設(shè)計(jì)了一種自適應(yīng)模糊滑模容錯(cuò)控制器,通過(guò)對(duì)系統(tǒng)廣義的干擾實(shí)時(shí)補(bǔ)償提高控制精度。文獻(xiàn)[12]通過(guò)跟蹤一個(gè)參考模型,設(shè)計(jì)直接自適應(yīng)律補(bǔ)償跟蹤誤差以抑制模型不確定的影響。文獻(xiàn)[13]詳細(xì)綜述了預(yù)設(shè)性能控制,通過(guò)設(shè)置性能函數(shù)定量描述受控系統(tǒng)的瞬態(tài)與穩(wěn)態(tài)性能,可以保證系統(tǒng)狀態(tài)始終位于性能包絡(luò)內(nèi)的高品質(zhì)控制。文獻(xiàn)[14]基于自適應(yīng)慣量估計(jì)器的方法,對(duì)慣量矩陣進(jìn)行估計(jì),仿真表明控制精度顯著提高。以上的研究均不考慮通信約束條件,默認(rèn)為是連續(xù)時(shí)間的控制器,控制器實(shí)時(shí)、連續(xù)地更新,會(huì)對(duì)低成本即插即用小衛(wèi)星網(wǎng)絡(luò)通信總線帶來(lái)很大壓力。本文將研究含有慣量信息不確定的姿態(tài)跟蹤控制問(wèn)題,考慮通信資源約束的條件,將事件驅(qū)動(dòng)控制與慣量自適應(yīng)估計(jì)器結(jié)合,設(shè)計(jì)跟蹤控制算法,既減少模型不確定對(duì)姿態(tài)控制帶來(lái)的影響,又能減小總線通信負(fù)載。
1 數(shù)學(xué)模型與問(wèn)題描述
1.1 航天器姿態(tài)動(dòng)力學(xué)/運(yùn)動(dòng)學(xué)誤差模型
航天器姿態(tài)跟蹤誤差動(dòng)力學(xué)/運(yùn)動(dòng)學(xué)模型[10]為
(1)
式中ω∈3表示航天器本體系相對(duì)慣性系角速度;ωd∈3表示航天器本體坐標(biāo)系相對(duì)慣性坐標(biāo)系的期望角速度;ωe=ω-Cωd∈3表示角速度誤差;(qv,e,q0,e)∈3×表示誤差四元數(shù),qv,e表示誤差四元數(shù)的矢量部分,q0,e表示誤差四元數(shù)的標(biāo)量部分;C表示目標(biāo)系到本體系的姿態(tài)旋轉(zhuǎn)矩陣;J∈3×3表示轉(zhuǎn)動(dòng)慣量矩陣;u∈3表示三軸控制力矩;d∈3表示三軸干擾力矩。

為了便于控制器設(shè)計(jì),本文基于如下2個(gè)假設(shè):


1.2 問(wèn)題描述
本文的控制目標(biāo)為式(1)描述的跟蹤誤差模型,設(shè)計(jì)控制律使姿態(tài)跟蹤誤差在外干擾力矩作用下仍能收斂至有界區(qū)間內(nèi)。姿態(tài)控制問(wèn)題分為2個(gè)內(nèi)容:1)解決無(wú)慣量信息下的姿控問(wèn)題,2)解決控制系統(tǒng)通信資源約束下的姿控問(wèn)題。

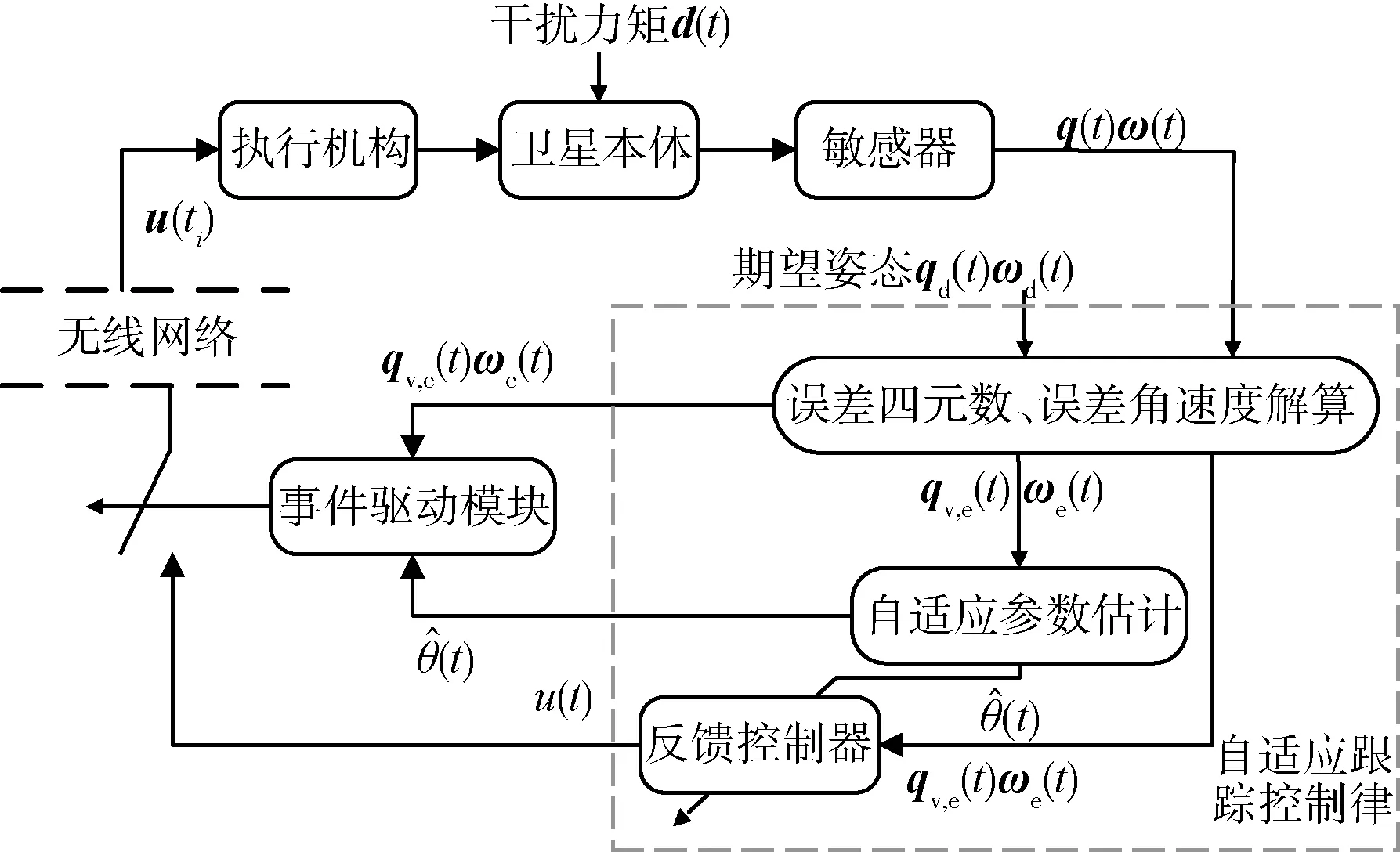
圖1 基于事件驅(qū)動(dòng)的自適應(yīng)姿態(tài)跟蹤控制系統(tǒng)結(jié)構(gòu)
在事件驅(qū)動(dòng)控制策略下,連續(xù)時(shí)間的控制被分割為離散的更新時(shí)刻,若在一個(gè)有限的時(shí)間間隔內(nèi),事件驅(qū)動(dòng)條件被反復(fù)滿足,事件驅(qū)動(dòng)間隔趨于0,本應(yīng)離散的控制變成連續(xù)的控制,事件驅(qū)動(dòng)條件失去意義,這種現(xiàn)象在事件驅(qū)動(dòng)研究領(lǐng)域被稱為Zeno行為(Zeno behavior)。因此在給出事件驅(qū)動(dòng)條件時(shí),要保證在該條件下,事件驅(qū)動(dòng)的間隔Ti=ti+1-ti存在一個(gè)大于0的下界,由此推出在有限時(shí)間間隔內(nèi),驅(qū)動(dòng)次數(shù)不會(huì)是無(wú)限次。本文將對(duì)姿態(tài)跟蹤所設(shè)計(jì)的事件驅(qū)動(dòng)條件做出無(wú)Zeno行為的分析和證明。
2 事件驅(qū)動(dòng)自適應(yīng)跟蹤控制律
2.1 模型轉(zhuǎn)換
根據(jù)文獻(xiàn)[5],使用跟蹤誤差qv,e和ωe定義一種輔助變量s=ωe+βqv,e,β為設(shè)計(jì)參數(shù)。對(duì)s求導(dǎo)并代入式(1),則動(dòng)力學(xué)模型轉(zhuǎn)化為

(2)
其中,L為動(dòng)力學(xué)非線性項(xiàng)

(3)
由于慣量信息未知,需要將轉(zhuǎn)動(dòng)慣量矩陣參數(shù)從L中分離。定義一種矩陣運(yùn)算F(a)∈3×6
(4)

則對(duì)任意三維向量a均有Ja=F(a)θ成立。L表示為
L=Yθ
(5)
其中,
Y=-(ωe+Cωd)×F(ωe+Cωd)
(6)
注2. 由式(5)所示,L被分離為2部分,分別為不含慣量信息的Y∈3×6以及θ表示慣量參數(shù)。利用該方程,可以設(shè)計(jì)自適應(yīng)控制律對(duì)θ進(jìn)行參數(shù)估計(jì),從而避免使用慣量真實(shí)值。
2.2 事件驅(qū)動(dòng)自適應(yīng)跟蹤控制律設(shè)計(jì)
設(shè)計(jì)姿態(tài)跟蹤控制器為
(7)
(8)


(9)
其中,i=1,2,3,…表示觸發(fā)時(shí)序,0<α<1和γ>0為設(shè)計(jì)參數(shù)。
離了。不離還能過(guò)?妮兒啊,你不知道那兩年我過(guò)的是啥日子,妮兒她娘沒(méi)有給過(guò)我一個(gè)好臉。白天在外面還好,一到晚上回來(lái),她就徹底蔫了——就像那院里的合歡,白天精神晚上就收了。她出院回來(lái),我忍著,一直沒(méi)敢提分開(kāi)的事,想等她身體恢復(fù)恢復(fù)再說(shuō)。沒(méi)想到,滿了月之后她自己倒提了出來(lái)。妮兒她爹,拖累你幾年了,咱分開(kāi)吧。說(shuō)的時(shí)候,她也不看我。
注3.α與γ的值越大,采樣頻率會(huì)相應(yīng)減小,控制精度隨之下降。取值時(shí),需要同時(shí)考慮通信約束和控制精度要求。γ保證系統(tǒng)始終存在一個(gè)小的閾值,避免出現(xiàn)Zeno行為。
2.3 控制系統(tǒng)閉環(huán)穩(wěn)定性證明

|ωe,j|≤2Δ,|qv,ei|≤Δ/β,i=1,2,3
(10)
Ω=
證.設(shè)Lyapunov函數(shù)
求導(dǎo)并代入自適應(yīng)律(7)得
(11)

(12)

(13)
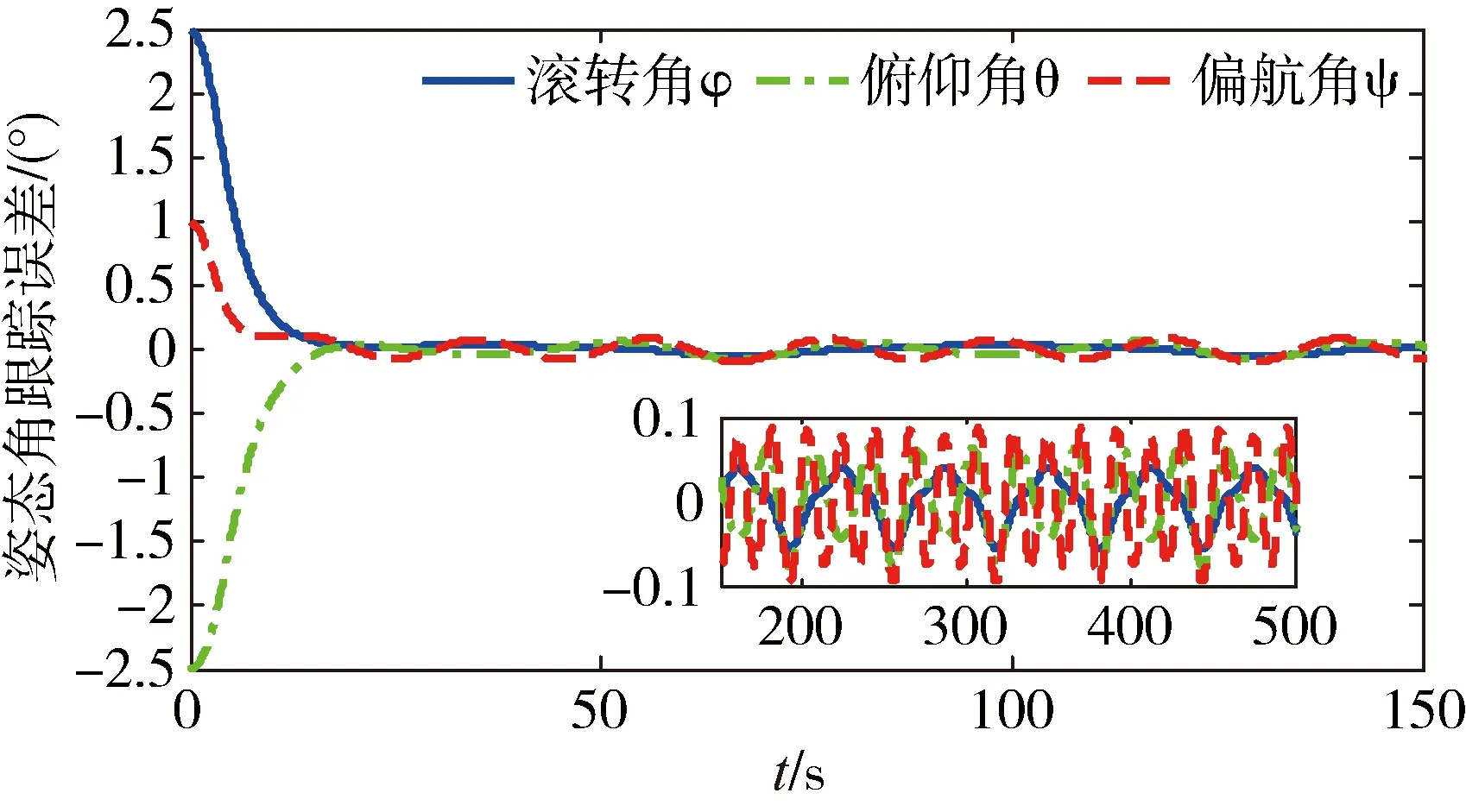
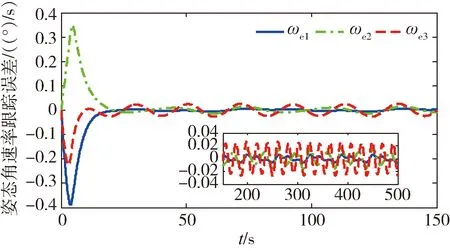
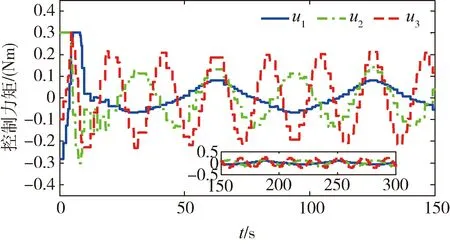
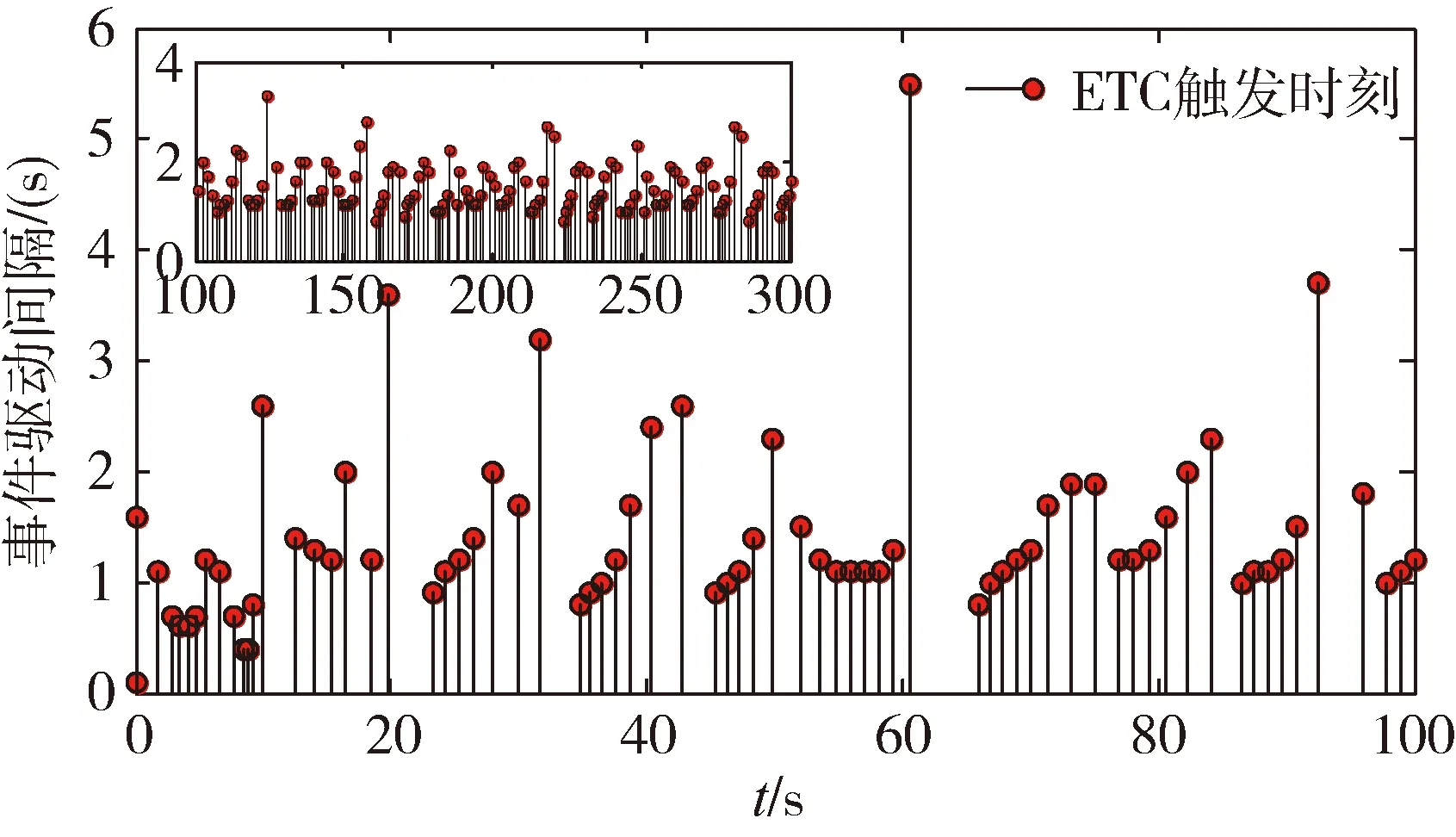
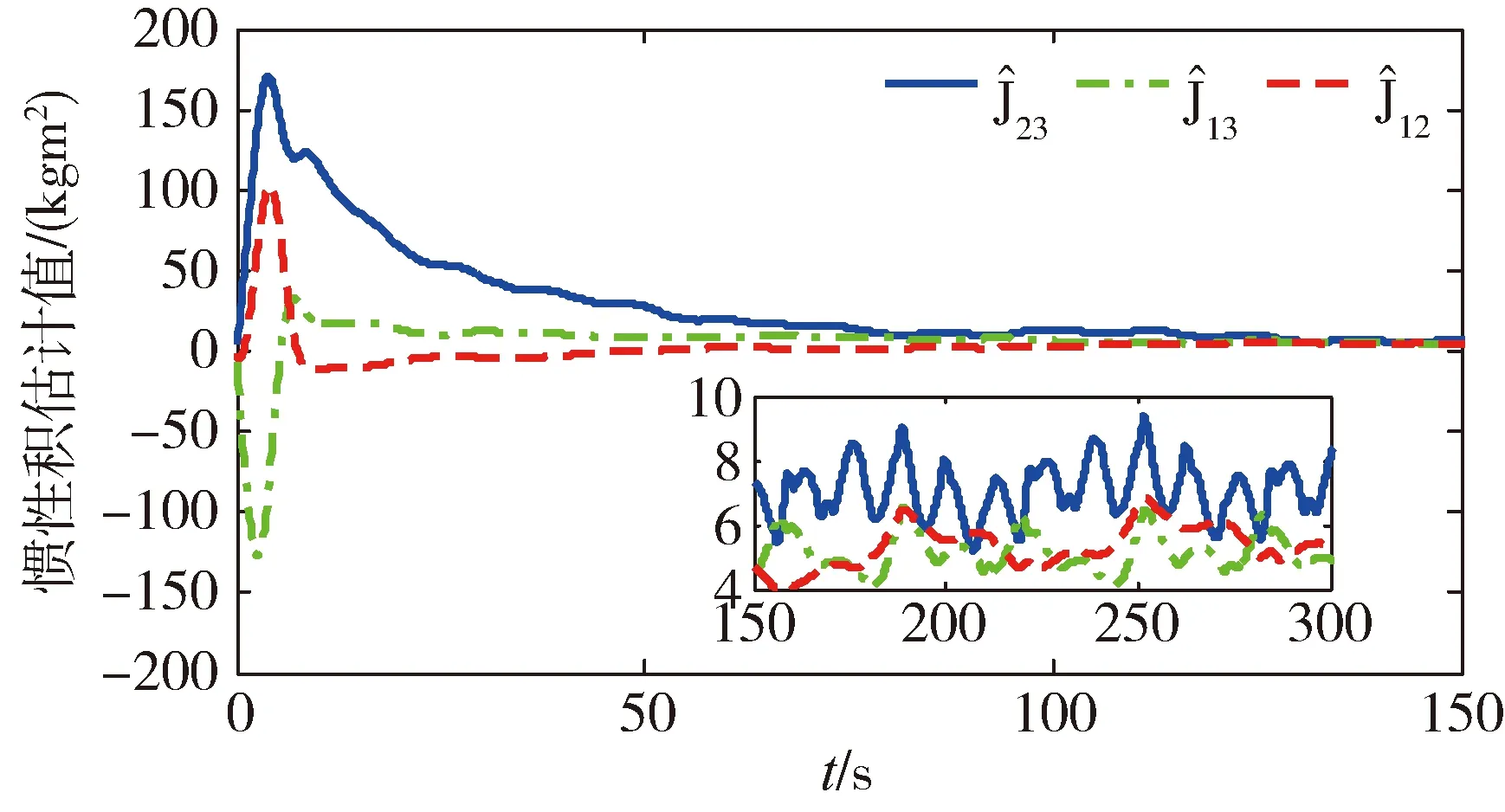
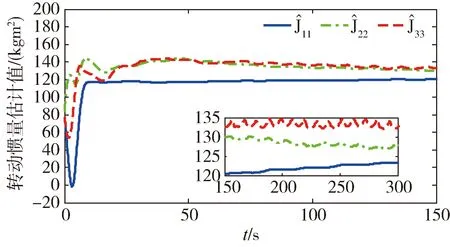
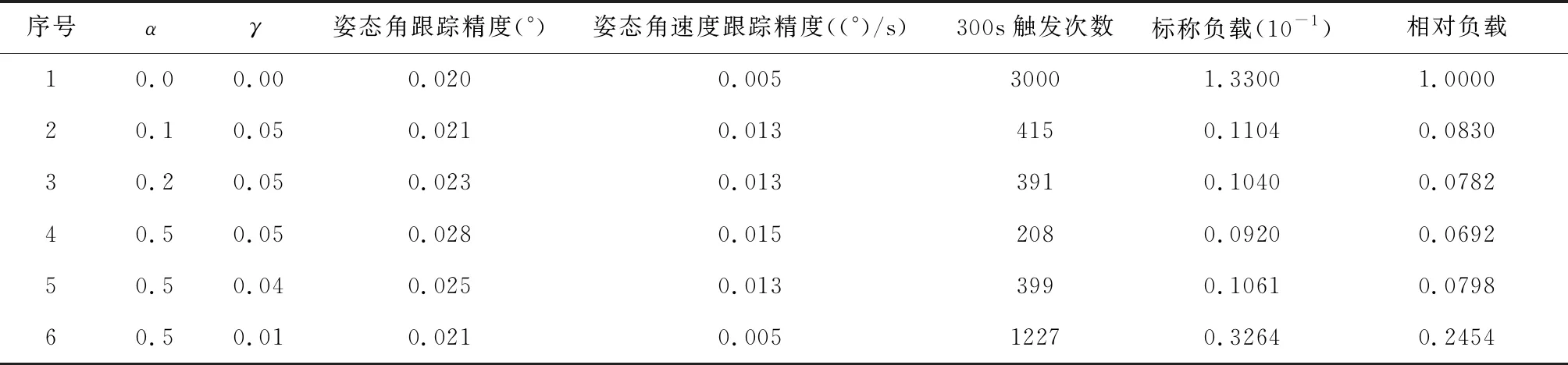
?μ滿足0<μ (14) 其中: ε=2(k-αk-μ)/Jmax 引理[15]2. 對(duì)于任意列向量e∈n有成立。 定理2. 在由式(1)描述的航天器姿態(tài)跟蹤控制系統(tǒng)中,給定期望的跟蹤姿態(tài)信息滿足假設(shè)2,則在自適應(yīng)控制律式(7)((8)和事件驅(qū)動(dòng)觸發(fā)式(9)作用下,事件驅(qū)動(dòng)更新間隔Ti=ti+1-ti始終存在大于0的下界,無(wú)Zeno行為。 (15) 其中,R定義為: (16) (17) 因此兩次觸發(fā)的時(shí)間間隔Ti=ti+1-ti可以表示為 (18) (19) 為了例證第2節(jié)所設(shè)計(jì)的控制律和事件驅(qū)動(dòng)觸發(fā)條件,本節(jié)給出姿態(tài)跟蹤的仿真實(shí)例。在轉(zhuǎn)動(dòng)慣量真實(shí)值未知,航天器姿態(tài)與期望姿態(tài)存在初始偏差情況下,存在2種工況:1)不使用自適應(yīng)率的PTTC控制。2)使用了自適應(yīng)率的ETC控制。仿真參數(shù)如下: 轉(zhuǎn)動(dòng)慣量矩陣真實(shí)值J與初始估計(jì)值J0分別為 J0=diag(80,80,80)kg·m2 故自適應(yīng)參數(shù)的初始估計(jì)值為 期望跟蹤的角速度為 ωd=[0.005sin(0.1t)0.01sin(0.2t)0.015sin(0.3t)]rad/s 工況1:為了體現(xiàn)本文設(shè)計(jì)控制律的有效性,作為對(duì)照實(shí)驗(yàn),使用類似文獻(xiàn)[8]中的PD反饋控制器。控制律為u(t)=-L(J→J0)-kωe-kβqv,e,式中L(J→J0)表示控制器中的非線性項(xiàng)的慣量信息由不精確的慣量代替。控制器的更新間隔為定步長(zhǎng)0.1s觸發(fā)一次的PTTC控制方法。為了使仿真結(jié)果更加直觀,輸出時(shí)誤差四元數(shù)已經(jīng)轉(zhuǎn)換為歐拉角誤差。仿真結(jié)果如圖2~ 3所示。仿真結(jié)果表明,由于控制器中慣量信息為非真實(shí)值,影響了控制精度,姿態(tài)跟蹤精度為0.1°。 圖2 工況1姿態(tài)角跟蹤誤差 圖3 工況1姿態(tài)角速度跟蹤誤差 圖4 工況2姿態(tài)角跟蹤誤差 圖5 工況2姿態(tài)角速度跟蹤誤差 圖6 工況2控制力矩 圖7 工況2事件驅(qū)動(dòng)條件滿足情況 圖8 工況2事件驅(qū)動(dòng)觸發(fā)間隔 利用文獻(xiàn)[6]提出的一種姿態(tài)控制器總線資源使用率的評(píng)估方法,評(píng)估第3節(jié)設(shè)計(jì)的控制器的通訊資源以及控制精度,以說(shuō)明注3中的α與γ對(duì)控制器性能的影響。 具體方法如下:1)定義一個(gè)時(shí)間段內(nèi)總線負(fù)載為U=τ/h。其中τ=8a/v,a為數(shù)據(jù)包大小,單位為bytes,v為總線傳輸速率,單位為bit/s。2)設(shè)計(jì)控制周期100ms時(shí)的總線負(fù)載為標(biāo)稱值U0。其他控制方法中總線負(fù)載標(biāo)稱值之比ρ=U/U0為相對(duì)負(fù)載。ρ越小說(shuō)明總線負(fù)載越低,通信資源節(jié)省效果更明顯。星上使用的總線傳輸速率v為19200bit/s,控制輸入a數(shù)據(jù)包為32bytes,傳輸時(shí)間τ為13.3ms,故標(biāo)稱負(fù)載U0為0.133。選擇不同的事件驅(qū)動(dòng)參數(shù)α與γ,仿真結(jié)果如表1所示。α與γ的值越大,則觸發(fā)會(huì)相應(yīng)減小,總線相對(duì)負(fù)載減小,控制精度隨之下降。因此對(duì)事件驅(qū)動(dòng)參數(shù)取值時(shí)要兼顧精度與通信約束。 圖9 工況2轉(zhuǎn)動(dòng)慣量估計(jì)值 圖10 工況2慣性積估計(jì)值 表1 事件驅(qū)動(dòng)參數(shù)與跟蹤精度及總線負(fù)載 針對(duì)轉(zhuǎn)動(dòng)慣量未知的航天器姿態(tài)跟蹤問(wèn)題,考慮模塊間通訊資源約束,提出了一種基于事件驅(qū)動(dòng)的航天器姿態(tài)自適應(yīng)跟蹤算法。該算法能通過(guò)自適應(yīng)率估計(jì)慣量真實(shí)值,減少模型不準(zhǔn)確對(duì)姿態(tài)控制性能的影響;事件驅(qū)動(dòng)控制策略的引入能大幅度減少通訊頻率,減小總線帶寬負(fù)載,達(dá)到節(jié)約通信資源的目的。本文給出了控制系統(tǒng)的結(jié)構(gòu)、控制算法設(shè)計(jì)過(guò)程,證明了閉環(huán)穩(wěn)定性,對(duì)事件驅(qū)動(dòng)獨(dú)有的避免Zeno行為作出了證明與分析。通過(guò)對(duì)照仿真算例表明,該方法可以有效降低模型不確定帶來(lái)的姿態(tài)跟蹤誤差,減小總線負(fù)載。研究?jī)?nèi)容可為即插即用小衛(wèi)星姿控設(shè)計(jì)提供理論參考。
2.4 避免Zeno行為證明








3 仿真校驗(yàn)


4 結(jié)論
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04