陀螺羅經和計程儀輔助的GNSS/SINS松組合導航系統*
2021-04-27 11:02:12顧明星謝宗軒趙建森王勝正
航天控制 2021年1期
顧明星 劉 衛 胡 媛 謝宗軒 趙建森 王勝正
1.上海海事大學商船學院,上海 201306 2.上海海洋大學工程學院,上海 201306
0 引言
無人駕駛技術的發展對航行器導航系統的準確性和可靠性提出了更高要求[1-2]。由全球導航衛星系統(GNSS)和捷聯式慣性導航系統(SINS)構成的GNSS/SINS組合導航系統[3]會因衛星信號的受干擾或丟失而失效。陀螺羅經和計程儀輔助的組合導航系統是一種新的導航系統,該系統是在GNSS/SINS松組合的基礎上引入航行器的航向和航速信息,能抑制SINS單獨工作時誤差迅速擴大的影響。
GNSS/SINS組合導航系統能夠優勢互補,SINS能輔助GNSS捕獲和跟蹤衛星信號,增強GNSS的抗干擾性;GNSS能抑制SINS的誤差積累,提高導航精度[3]。GNSS和SINS的組合方式分為松組合、緊組合和超緊組合[4]。其中,GNSS/SINS松組合是GNSS和SINS相互獨立地進行定位、定速算法,然后兩者的定位結果通過一個前反饋式卡爾曼濾波器(Kalman Filter,KF)整合到一起,最終SINS輸出經濾波器修正的導航結果[5]。
目前主要有2種方法提高GNSS失效情況下SINS單獨導航時的導航精度:1)預先對慣性器件的誤差進行建模,然后在導航解算過程中對慣性誤差進行補償[6];2)利用與載體相關的運動信息,輔助SINS修正其誤差[4,7-9]。文獻[4]直接利用飛行器的速度變化特性約束飛機的SINS/GNSS組合導航誤差,對于其他航行器的導航應用具有局限性。文獻[7]提出一種融入慣性器件隨機噪聲修正和載體運動特征約束的車載式MEMS-SINS/GNSS松組合導航系統,該系統利用加速度計提供的速度信息輔助修正SINS誤差,使其在GNSS失效情況下的導航精度優于傳統導航系統。文獻[8-9]提出利用計程儀輔助GNSS/SINS組合導航系統,該系統在獲取初始位置信息后能不依賴GNSS信號而完成一段時間的高精度導航。
在多傳感器的數據融合方面[10-12],根據系統特性,濾波方法包括加權最小二乘法(Weighted Least Square Principle,WLSP)、擴展卡爾曼濾波(Extended Kalman Filter,EKF)、無跡卡爾曼濾波(Unscented Kalman Filter,UKF)、中心差分卡爾曼濾波(Central Difference Kalman Filter,CDKF)等。文獻[10]在GPS/INS/DVL的數據融合過程中,提出一種基于加權最小二乘法的自適應聯邦強跟蹤濾波算法以保證整個系統的可靠性。文獻[11]提出一種基于模糊自適應UKF的艦船SINS/GPS/DVL組合系統聯合濾波算法,SINS分別與GPS和多普勒計程儀構成2個子濾波器,再將子濾波得到的數據輸入主濾波器,但系統的非線性誤差仍然無法避免。文獻[12]在CDKF的基礎上,提出了基于高斯過程的CDKF參數預測能力,減小系統預測誤差。
針對GNSS/SINS組合導航系統在GNSS失效情況下,SINS單獨工作時導航誤差會迅速擴大的特點,本文提出了利用陀螺羅經(Gyrocompass,GC)和計程儀(Vialog,VL)輔助GNSS/SINS的組合導航方法,可以實現通過增加載體的運動信息并構造線性系統來克服導航誤差迅速擴大的缺點。該方法采用GNSS/SINS松組合方式,將GC和VL分別提供的航向和航速信息導入由SINS誤差模型構造的KF中。仿真實驗表明,在GNSS失效情況下,有GC/VL輔助的GNSS/SINS組合導航系統導航誤差明顯小于無輔助的導航系統。
1 GNSS/SINS組合導航系統設計方案
1.1 捷聯式慣性導航系統更新算法
SINS的定位原理是利用慣性器件測得的角速度和加速度,推算出當前載體的位置、速度和姿態[13],更新方程為
(1)
(2)
(3)

1.2 捷聯式慣性導航系統誤差分析
1.2.1 慣性傳感器測量誤差
慣性導航系統中的慣性傳感器包括3個陀螺儀和3個加速度計[13]。
陀螺組件的測量誤差模型為
(4)

加速度計組件的測量誤差模型為
(5)

1.2.2 姿態誤差方程

捷聯慣導姿態誤差微分方程為
(6)

(7)
(8)

(8.1)
(8.2)
(8.3)

則最終姿態誤差方程(6)變為

(9)
1.2.3 速度誤差方程
導航計算機解算出的速度和理想速度存在偏差,該偏差稱為速度誤差。捷聯慣導速度誤差微分方程為

(10)


M3為重力誤差方程δgn=M3δp中的系數,則最終速度誤差方程(10)變為
(11)
1.2.4 位置誤差方程
位置誤差方程為
(12)

則最終位置誤差方程為
(13)
(13.1)
(13.2)
1.3 卡爾曼濾波算法
卡爾曼濾波算法包括狀態方程和量測方程[14]。
根據SINS的線性誤差模型,構造狀態方程如下
(14)
(15)
GNSS正常運行時能為載體提供位置信息和速度信息,并實時校正SINS的誤差。GNSS/SINS系統的量測方程為
(16)
(17)
卡爾曼濾波算法具體流程如下:
狀態一步預測誤差
(18)
狀態一步預測均方誤差陣
Pk/k-1=(I+Fδt)Pk-1(I+Fδt)T+GQGTδt2
(19)
式(19)中:Q=D(Wb)。
濾波增益
Kk=Pk/k-1HT(HPk/k-1HT+R)-1
(20)
式(20)中:R=D(V)。
狀態估計
(21)
狀態估計均方誤差陣
Pk=(I-KkH)Pk/k-1
(22)
2 GC/VL輔助系統
在GNSS失效情況下,SINS/GC/VL作為備用導航系統開始運行,并且GC/VL能夠輔助修正SINS的慣性器件長時間累積的誤差。
2.1 陀螺羅經輔助模型
陀螺羅經是根據陀螺儀的定軸性和進動性,并結合地球的自轉與重力特性,為載體提供航向信息的儀器[15]。
(23)
(24)
式(23)中:Z1是量測向量,H1是量測矩陣,X是狀態向量,V1是量測噪聲向量。
2.2 計程儀輔助模型
計程儀是一種具有測速和計算航程功能的導航儀器[16]。計程儀可精確測量載體相對于地面或海底的絕對速度水平分量,其測量誤差不隨時間增加而累積,可用來實時補償SINS的誤差[17]。
(25)
(26)
式(25)中,Z2是量測向量,H2是量測矩陣,X是狀態向量,V2是量測噪聲向量。
2.3 GNSS/SINS/GC/VL組合導航系統設計
有陀螺羅經和計程儀輔助的GNSS/SINS松組合導航系統的結構框圖如圖1所示。
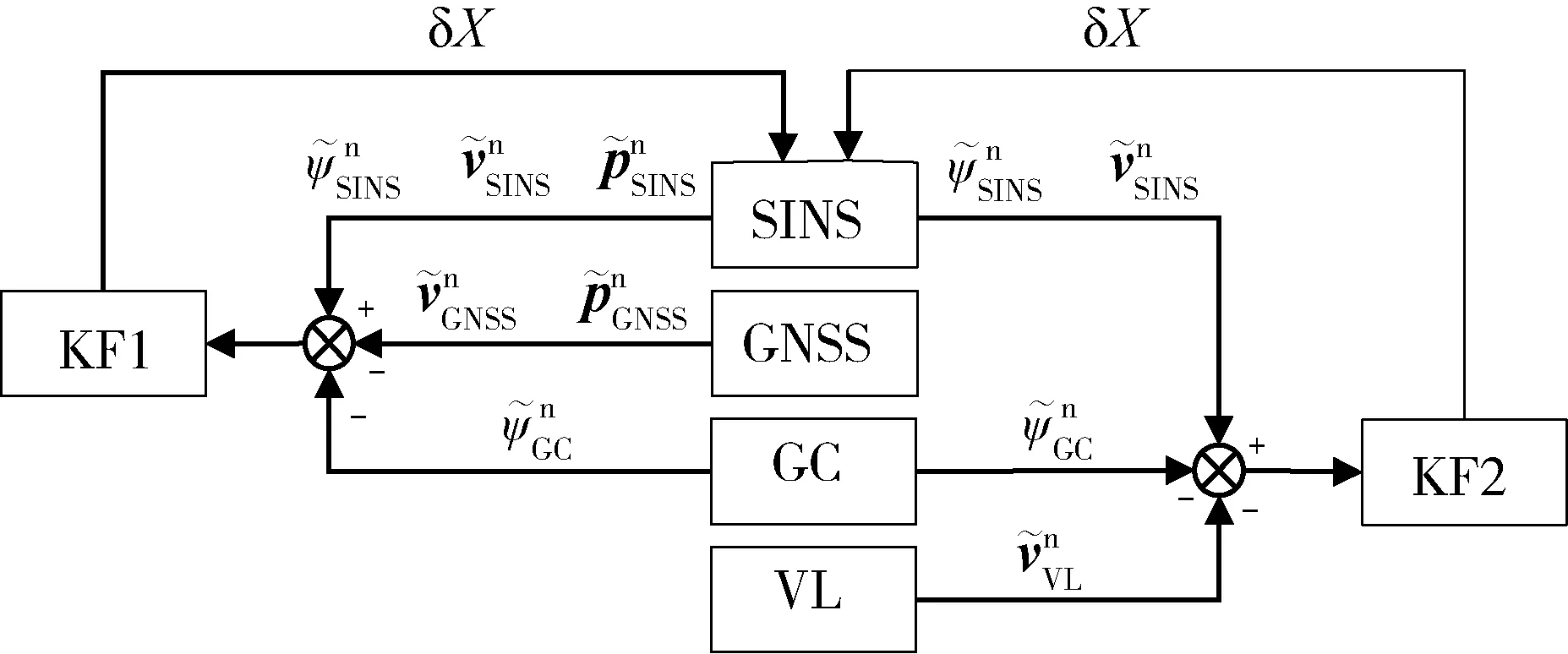
圖1 GNSS/SINS/GC/VL松組合導航系統框圖
在GNSS正常情況下,GNSS/SINS/GC組合導航系統正常運行。SINS輸出航向、速度、位置信息,GNSS輸出速度、位置信息,GC輸出航向信息,這些數據分別作差并經KF1濾波得到慣導誤差,反饋修正SINS,系統最終輸出修正后的導航結果。
結合式(16)和(23),GNSS/SINS/GC組合導航系統的量測方程為
(27)
(28)
式(27)中:Z是量測向量,H是量測矩陣,X是狀態向量,V是量測噪聲向量。
在SINS失效情況下,啟用備用SINS/GC/VL組合導航系統。SINS輸出航向、速度信息,GC輸出航向信息,VL輸出航速信息,這些數據分別作差并經KF2濾波得到航向誤差和速度誤差,并反饋修正SINS,系統最終輸出修正后的導航結果。
結合式(23)和(25),SINS/GC/VL組合導航系統的量測方程為
(29)
(30)
3 仿真實驗
3.1 軌跡模擬與慣性器件數據的生成
利用軌跡發生器設計航行器航行軌跡,通過捷聯慣導反演算,反推出航行器經該航跡產生的陀螺儀和加速度計數據,如圖2~3所示。
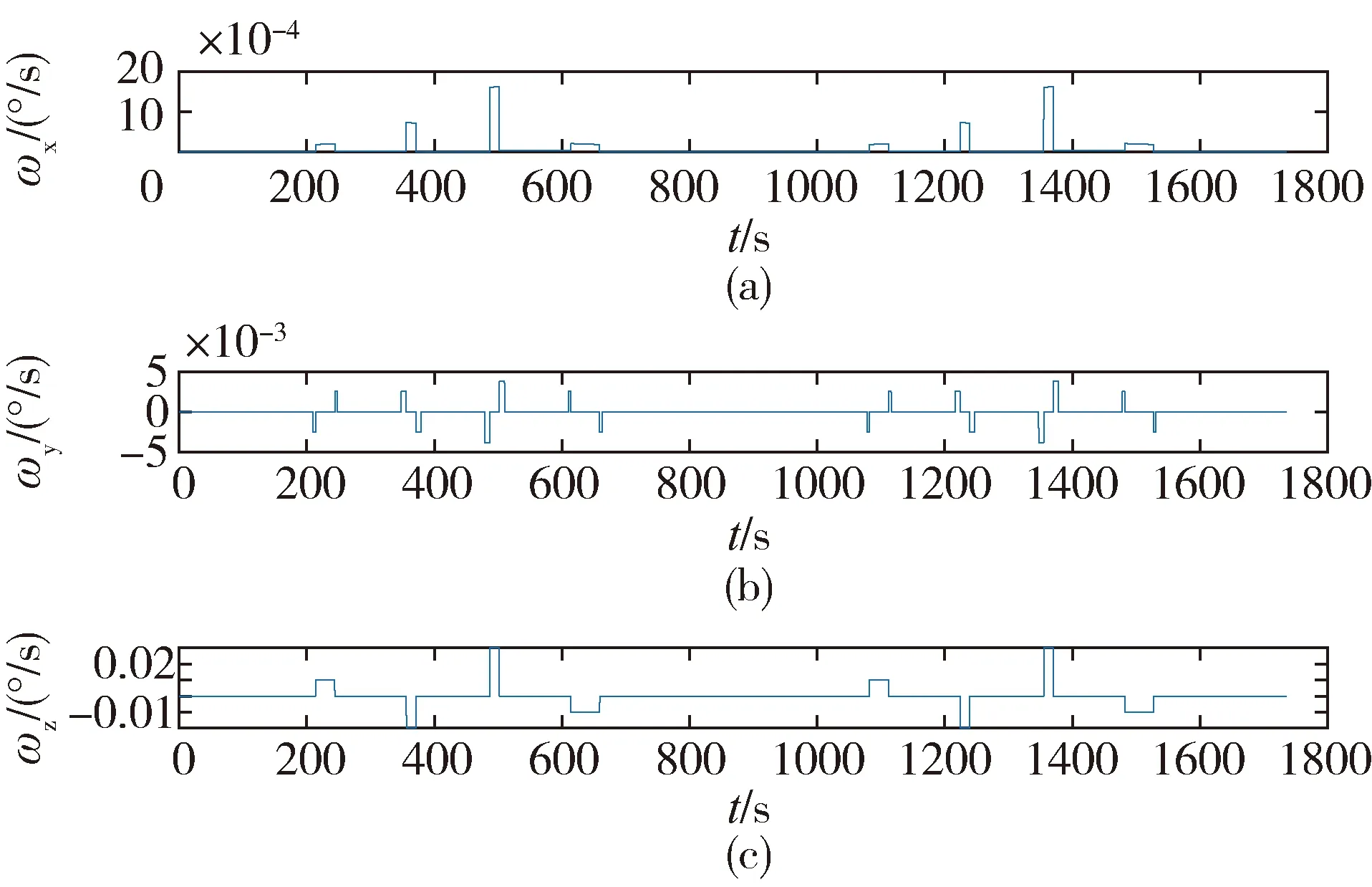
圖2 角速度值
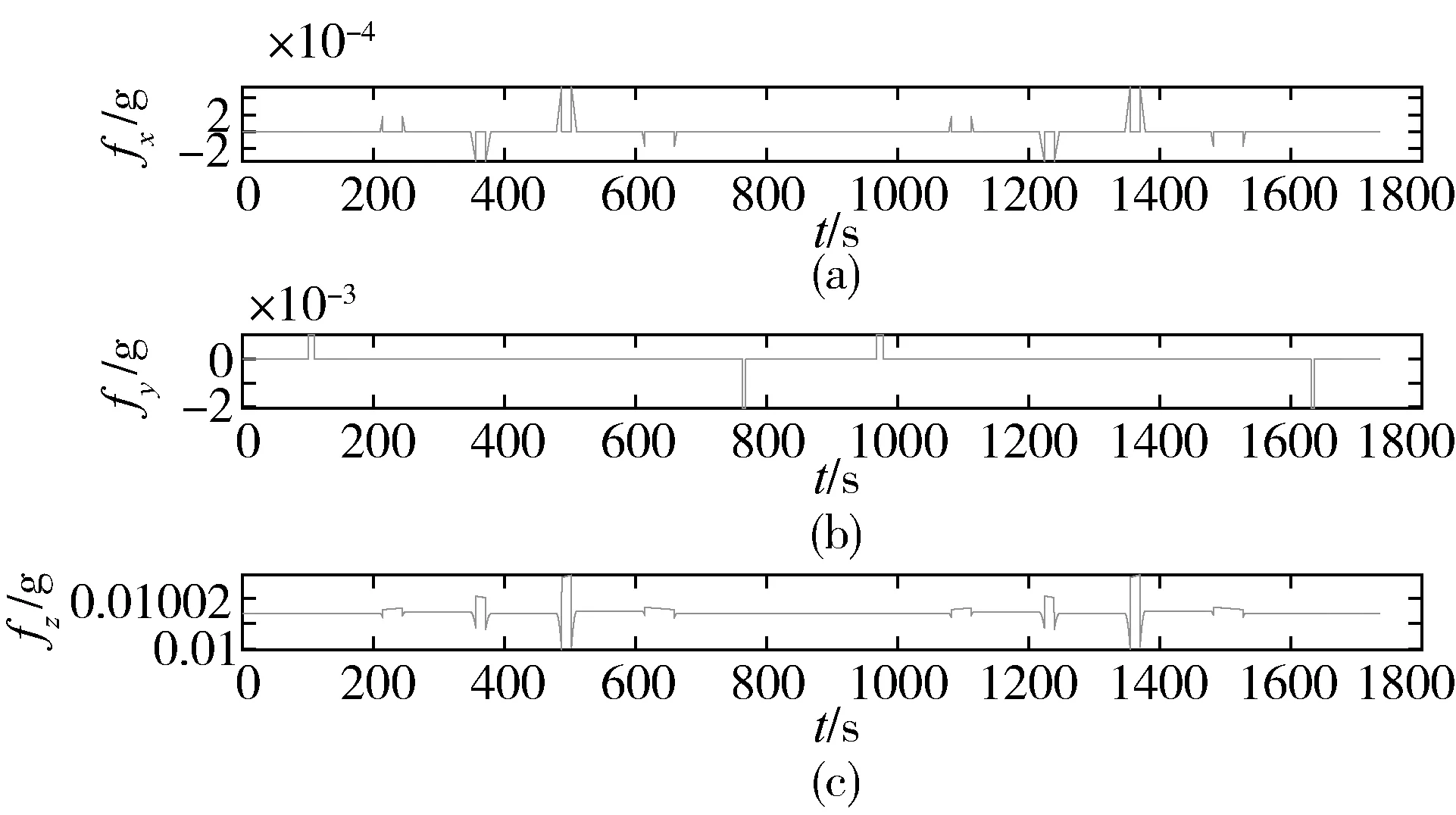
圖3 加速度值
3.2 仿真校驗
考慮到SINS存在實際誤差,設置SINS的標定誤差參數,并進行仿真實驗。SINS中,陀螺零偏為5(°)/h,加速度計零偏為200μg,角度隨機游走系數為0.05(°)/h1/2,速度隨機游走系數為5μg/Hz1/2。
為了探究有GC/VL輔助的GNSS/SINS在GNSS異常情況下的導航性能,分別進行三組實驗并對比實驗結果。
實驗1:SINS單獨導航,并記錄位置、速度和姿態等導航結果;
實驗2:SINS/GC/VL組合導航,并記錄導航結果;
實驗3:GNSS/SINS/GC/VL組合導航,并記錄導航結果。
3種導航系統分別經過設計的軌跡,以實驗3的導航結果為參考,實驗1、2相對實驗3的誤差如圖5~7所示。圖4為3種導航系統的位置結果,圖5為位置相對誤差,圖6為速度相對誤差,圖7為姿態相對誤差。
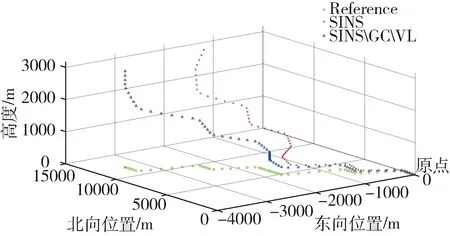
圖4 位置對比側視圖

圖5 導航位置相對誤差
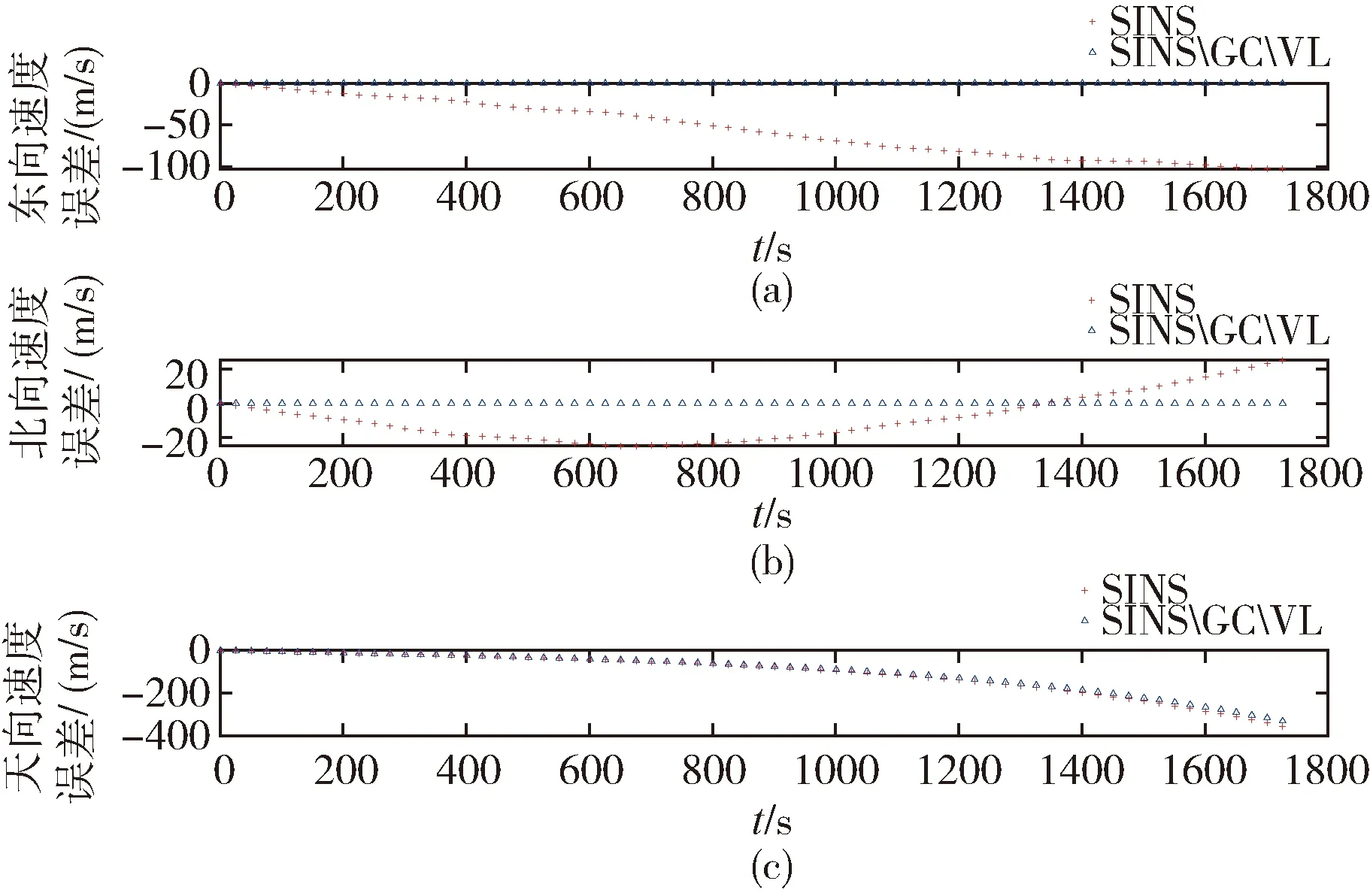
圖6 導航速度相對誤差
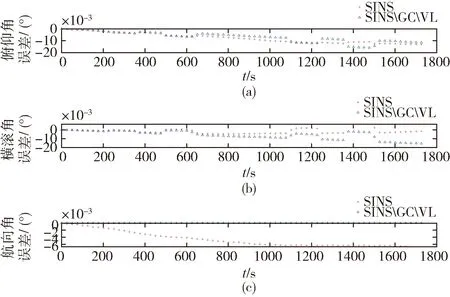
圖7 導航姿態相對誤差
在圖4中,以GNSS/SINS/GC/VL的位置結果作為參考(“○”標記),SINS的位置結果(“+”標記)迅速偏移,SINS/GC/VL組合導航系統的位置結果(“△”標記)優于單獨的SINS。
在圖5和圖6中,由于VL所提供的航速信息為水平方向上航行器的運動狀態,SINS/GC/VL組合導航系統的速度和位置的水平誤差明顯小于SINS單獨導航的,但在垂直方向上,兩種導航系統的結果差異不大。
在圖7中,由于GC所提供的航向信息被引入到導航系統,SINS/GC/VL組合導航系統的航向角誤差明顯小于SINS單獨導航的,但俯仰角與橫滾角的誤差未得到顯著改善。
4 結論
為解決GNSS/SINS松組合導航系統在GNSS失效時,導航結果失真的現象,本文提出一種有陀螺羅經和計程儀輔助的GNSS/SINS組合導航系統,根據引入的航向信息和航速信息構造兩組濾波器,實現GNSS/SINS組合導航系統與陀螺羅經、計程儀的有效結合。根據SINS的誤差模型,對GNSS/SINS/GC/VL組合導航系統進行仿真,結果表明,GNSS/SINS/GC/VL在GNSS暫時失效時,SINS/GC/VL的導航誤差比單獨SINS的導航誤差小。此導航方法不僅減輕組合導航系統對GNSS的實時依賴性,還提高了航行器運動信息的利用率,是一種簡單有效的導航信息融合方法。
猜你喜歡
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中華手工(2017年2期)2017-06-06 23:00:31
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電子設計工程(2015年13期)2015-02-27 12:06:43
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32