北斗三號衛(wèi)星導(dǎo)航信號接收機端偽距偏差建模與驗證
2021-04-28 00:36:32毛飛宇龔曉鵬辜聲峰王琛琛樓益棟
測繪學(xué)報 2021年4期
毛飛宇,龔曉鵬,辜聲峰,王琛琛,樓益棟
1. 武漢大學(xué)衛(wèi)星導(dǎo)航定位技術(shù)研究中心,湖北 武漢 430079; 2. 北方信息控制研究院集團有限公司,江蘇 南京 211153
北斗三號全球?qū)Ш叫l(wèi)星系統(tǒng)(BDS-3)由中國自主建設(shè)運行,是北斗系統(tǒng)建設(shè)三步走中的最后一個階段,于2020年7月31日宣布正式開通,包括24顆中圓地球軌道(MEO)衛(wèi)星,3顆地球同步軌道(GEO)衛(wèi)星和3顆傾斜地球同步軌道(IGSO)衛(wèi)星[1-3]。與北斗二號相比,BDS-3不僅向下兼容B1I和B3I信號,還增加了B1C、B2a、B2b和B2(B2a+B2b)這4個新信號[4-5]。
為了簡化GNSS數(shù)據(jù)處理,通常認(rèn)為硬件延遲較為穩(wěn)定,且對于碼分多址(CDMA)的導(dǎo)航衛(wèi)星系統(tǒng),硬件延遲為衛(wèi)星端和接收機端硬件延遲之和,其中衛(wèi)星端對所有接收機相同,而接收機端則對同一系統(tǒng)內(nèi)所有衛(wèi)星相同[6]。但是相關(guān)研究表明,上述硬件延遲處理方法忽略了硬件延遲時空變化以及與接收機類型相關(guān)的偏差。
一方面,在北斗二號衛(wèi)星中發(fā)現(xiàn)了由衛(wèi)星星內(nèi)多路徑引起的與高度角相關(guān)的群延遲變化,其幅度可以超過1 m[7-8]。針對這一問題,文獻[9—11]相繼提出幾種不斷優(yōu)化的改正模型,經(jīng)驗證,模型改正可以顯著提升寬巷小數(shù)周偏差(FCB)解算精度[12]。文獻[13]對新一代BDS-3信號進行了初步評估,結(jié)果表明,所有信號均不存在與高度角相關(guān)的群延遲變化問題。另一方面,接收機的不同硬件配置(例如相關(guān)器間隔、前端帶寬等)會使GNSS信號在碼元對齊時引入偏差,進而導(dǎo)致不同類型接收機、不同衛(wèi)星的偽距觀測值產(chǎn)生系統(tǒng)性偏差(即偽距偏差)[14-18]。該偏差無法被衛(wèi)星鐘差或接收機鐘差吸收,會影響基于混合類型接收機網(wǎng)的GNSS精密數(shù)據(jù)處理,如衛(wèi)星差分碼偏差(DCB)估計[19]、衛(wèi)星鐘差估計[20]、模糊度固定和精密定位等[21-22]。針對該偏差的建模改正,文獻[20]的研究表明,對不同類型接收機B1I/B2I無電離層組合的偽距偏差進行按接收機類型建模改正,可以顯著提升初始鐘差估計結(jié)果及雙頻偽距定位精度。在此基礎(chǔ)上,文獻[21]分別計算了B1I、B2I和B3I這3個頻率上與接收機相關(guān)的偽距偏差,并驗證了其可以提升模糊度固定成功率、定位精度及收斂時間。然而,對于BDS-3衛(wèi)星,還缺乏對其偽距偏差建模的相關(guān)研究。
為了進一步提升基于混合類型接收機網(wǎng)的BDS-3多頻精密數(shù)據(jù)處理性能,有必要研究不同接收機類型間BDS-3的偽距偏差特性。本文首先對偏差建模方法進行了簡單介紹;然后對BDS-3與接收機類型相關(guān)的偽距偏差進行了特性分析與建模;最后通過衛(wèi)星DCB估計與單頻偽距定位對改正模型的有效性進行了驗證。
1 數(shù)學(xué)方法與模型
1.1 GNSS基本觀測方程
傳統(tǒng)的GNSS觀測模型將硬件延遲分為接收機端與衛(wèi)星端兩部分,表達式如下
(1)

當(dāng)考慮偽距觀測值存在與接收機類型相關(guān)的偽距偏差時,式(1)中的偽距觀測方程可轉(zhuǎn)化為如下形式

(2)
1.2 接收機偽距偏差建模方法
(3)

(4)

(5)


(6)

(7)
基于式(5)—式(7),可以求得不同頻率與接收機類型相關(guān)的偽距偏差如下
(8)
2 試驗與分析
本節(jié)基于以上方法,首先對BDS-3不同類型接收機的偽距偏差進行分析與建模,接著將其用于衛(wèi)星DCB估計和單頻偽距定位以驗證模型的正確性和有效性。
2.1 數(shù)據(jù)說明
國際GNSS服務(wù)(IGS)組織2012年提出了多GNSS試驗計劃(MGEX)項目[25-26],由中國建設(shè)的國際GNSS監(jiān)測評估系統(tǒng)(iGMAS)近年來也建成了數(shù)十個可采集多GNSS信號的跟蹤站[27-28]。本文采用MGEX、iGMAS兩個測站網(wǎng)部分站點數(shù)據(jù)進行研究,數(shù)據(jù)時間為2020年DOY 177—DOY 210,表1按接收機品牌及版本分類總結(jié)了本文使用的站點名稱及可觀測到的BDS-3偽距類型。

表1 不同品牌接收機信息、相應(yīng)測站列表及可觀測BDS-3偽距信號類型
2.2 偽距偏差分析與建模
由式(4)—式(8),本文采用C2I/C6I觀測值計算MW及IF組合,對于IFGF組合,計算了C2I/C6I與多種BDS-3新信號(C1P、C5P、C7D等)組合的偽距偏差。其中,計算偽距殘差采用了德國地學(xué)研究中心(GFZ)提供的精密星歷,且測站坐標(biāo)以事后靜態(tài)解固定。
圖1以C19和C30兩顆衛(wèi)星為例,給出了不同品牌接收機從2020年DOY 177—DOY 210的MW/IF組合平均偽距偏差值,不同顏色代表不同品牌接收機。從圖中容易看出,不同品牌接收機之間BDS-3衛(wèi)星C2I/C6I的MW和IF組合均存在與接收機類型有關(guān)的偏差。例如,TRIMBLE與SEPT兩個品牌接收機C19衛(wèi)星的MW組合偽距偏差相差在1.1 ns左右,它們的IF組合相差則高達6.0 ns;而同品牌接收機則比較一致,但是JAVAD品牌某版本的接收機與其他版本也存在一定偏差,因此將其單獨分為一類,在圖中表示為JAVAD DEC。這兩類因版本不同被區(qū)分的接收機對于C19和C30衛(wèi)星的MW組合均相差了大約0.2 ns,IF組合則分別相差約1.2 ns和0.9 ns。
圖2給出了C19和C20兩顆衛(wèi)星不同站點的IFGF組合偽距偏差情況,圖中不同的顏色代表不同的接收機,三角形、圓及五角星不同形狀分別代表1D/5D/7D、1P/5P及1X/5X/7X,標(biāo)注的1D、1P為與C2I/C6I組合的信號類型,如1D表示為C2I/C6I/C1D的IFGF組合。由圖2可知,IFGF組合偽距偏差也表現(xiàn)出和MW/IF組合類似的性質(zhì),在不同品牌接收機甚至同品牌不同版本接收機間存在一定的系統(tǒng)偏差,例如CETC品牌接收機C30衛(wèi)星C2I/C6I/C1P的IFGF組合偽距偏差分布在-0.6 ns左右,而UNICORN和SEPT兩個品牌則分別分布在-1.6 ns和0.9 ns左右;JAVAD兩類接收機C19衛(wèi)星C2I/C6I/C5X的IFGF偽距偏差差異約為0.6 ns。

圖2 IFGF組合平均偽距偏差Fig.2 Average pseudorange bias of IFGF combination
圖3是不同品牌接收機每天平均IFGF組合偽距偏差在不同日期間的STD值。雖然IFGF組合放大了原始觀測的噪聲,但從圖中可以看出,絕大部分接收機BDS-3衛(wèi)星IFGF組合不同日期間的STD均處于0.05 ns以下,而PANDA接收機表現(xiàn)相對較差可能因為僅有的一個站點觀測質(zhì)量不理想,但總體可以說明BDS-3衛(wèi)星與接收機類型相關(guān)的偽距偏差比較穩(wěn)定,因此可以用一個常數(shù)對其進行改正,這與文獻[21]中北斗二號偽距偏差特性一致。

圖3 IFGF組合偽距偏差不同日期間STD值Fig.3 STD values of pseudorange bias for IFGF combination across different days
基于MW/IF/IFGF組合偽距偏差結(jié)果,利用式(8)可以計算BDS-3不同頻率原始與接收機類型相關(guān)的偽距偏差改正值(限于文章篇幅,改正值可從該網(wǎng)址下載使用:https:∥www.researchgate.net/project/GNSS-Biases/update/5cd2cff83843b0b9825 1d8ed)。圖4給出了BDS-3不同接收機的部分偽距偏差改正值結(jié)果。由圖可知,BDS-3 C2I和C6I的偽距偏差在不同接收機之間可以達到±1.0 ns,例如C19衛(wèi)星的C2I信號中,BD070和TRIMBLE接收機的差異達到了2.2 ns。而BDS-3新信號上的偽距偏差則大部分在0.5 ns以內(nèi),這可能與BDS-3新信號的調(diào)制方式有關(guān)。

圖4 BDS-3與接收機類型相關(guān)的偽距偏差改正值Fig.4 Correction values of receiver-related pseudorange bias of BDS-3
2.3 偽距偏差模型DCB估計驗證
通過以上分析可知,當(dāng)采用混合接收機類型的數(shù)據(jù)估計衛(wèi)星DCB時,僅將DCB分為衛(wèi)星端和接收機端兩部分會導(dǎo)致偽距偏差部分被吸收到DCB產(chǎn)品中,導(dǎo)致不同基準(zhǔn)站網(wǎng)估計的衛(wèi)星DCB存在偏差。基于文獻[29]中提出的DCB估計模型,改正本文的偽距偏差模型可表達成式(9)

(9)

本文使用上述站點及另外61個MGEX站點(JAVAD:2;SEPT:51;TRIMBLE:8)2020年DOY 211—DOY 241的數(shù)據(jù),分別基于不同的測站組,通過以上方法計算了BDS-3衛(wèi)星未改正與改正偏差模型后的DCB結(jié)果,通過3種方案比較衛(wèi)星DCB一致性來驗證本文偽距偏差模型。表2給出了3種方案的詳細信息。

表2 3種方案比較策略
圖5給出了3種方案部分信號間的DCB差異,藍色和紅色分別代表未改正和改正后的不同方案BDS-3衛(wèi)星DCB差異,標(biāo)注的統(tǒng)計值為差異值的平均值。由圖5可以看到,在未改正及改正后,不同站網(wǎng)估計的衛(wèi)星DCB差異值變化明顯。其中,在未改正本文模型時,方案1估計的北斗三號C2I-C6I、C1P-C5P和C2I-C7D信號間DCB差值分別為0.58、0.33和0.67 ns。當(dāng)改正本文模型之后,iGMAS和MGEX兩類站網(wǎng)估計的衛(wèi)星DCB的差異分別減小0.05、0.12和0.19 ns,分別降低91.6%、64.7%和71.9%。此外,C1P-C5P的DCB差異值在未改正前已處于較低的水平,這可能是以上兩種觀測信號在不同類型接收機間的偽距偏差量級較小或者目前接收機類型較少引起的,仍需要更多可以觀測到這兩種信號的接收機來進一步研究。方案2估計的北斗三號C2I-C6I、C6I-C1P信號間DCB差異在使用本文模型改正后分別降低了96.0%和90.0%。而方案3中所有站點估計的C2I-C6I信號間DCB值與廣播星歷TGD值的差異在模型改正后降低較少,僅為24.4%,這是因為本文估計衛(wèi)星DCB的接收機與TGD估計的接收機類型不一致。
表3列出了3種方案BDS-3衛(wèi)星所有信號DCB差異統(tǒng)計值,由表可知,通過本文偽距偏差模型改正可以提升所有類型的衛(wèi)星DCB一致性,iGMAS和MGEX兩個接收機站網(wǎng)估計的衛(wèi)星DCB差異可以減少16.3%~91.6%。除SEPT接收機外,所有站點與僅用SEPT接收機站點估計的衛(wèi)星DCB差異可以減少26.6%~96.0%。
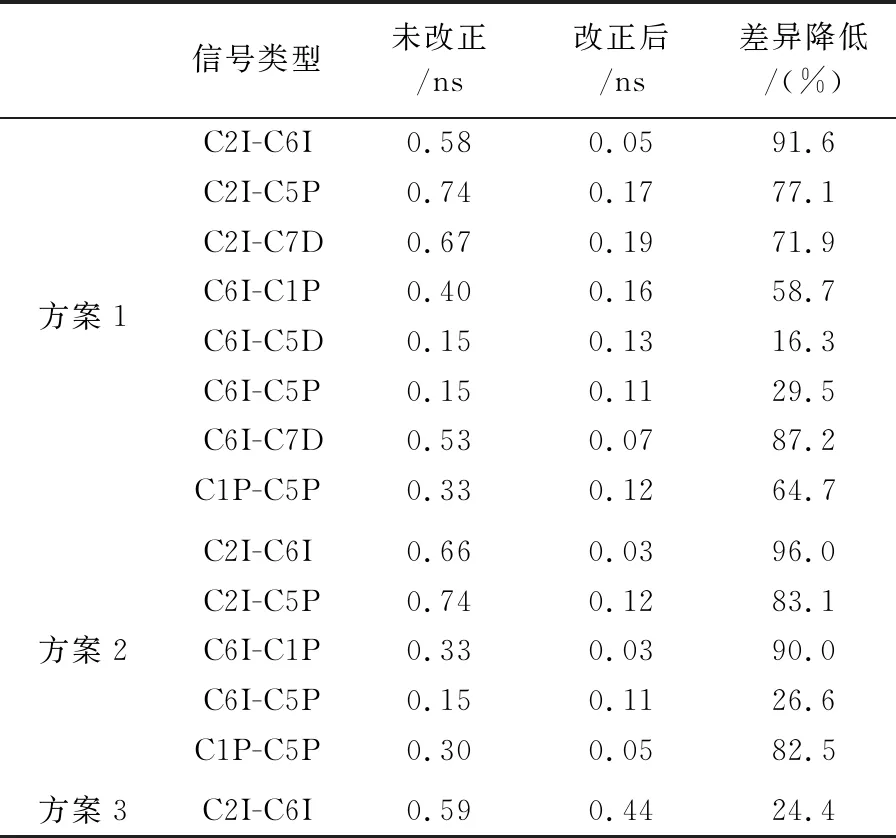
表3 3種方案BDS-3衛(wèi)星DCB差異均值
2.4 偽距偏差模型定位驗證
本節(jié)利用單頻偽距單點定位驗證本文偽距偏差模型的有效性。由于目前IGS提供的衛(wèi)星鐘差和衛(wèi)星DCB產(chǎn)品尚未考慮偽距偏差影響,因而需要重新估計衛(wèi)星鐘差與衛(wèi)星DCB產(chǎn)品[20]。其中衛(wèi)星軌道產(chǎn)品使用德國地學(xué)中心(GFZ)提供的事后精密軌道,電離層采用歐洲定軌中心提供的CODG產(chǎn)品,衛(wèi)星鐘差產(chǎn)品和衛(wèi)星DCB產(chǎn)品則利用MGEX網(wǎng)和iGMAS網(wǎng)基準(zhǔn)站分別改正和不改正偽距偏差產(chǎn)品解算得到兩組產(chǎn)品,限于篇幅,詳細的處理策略參考文獻[21]。
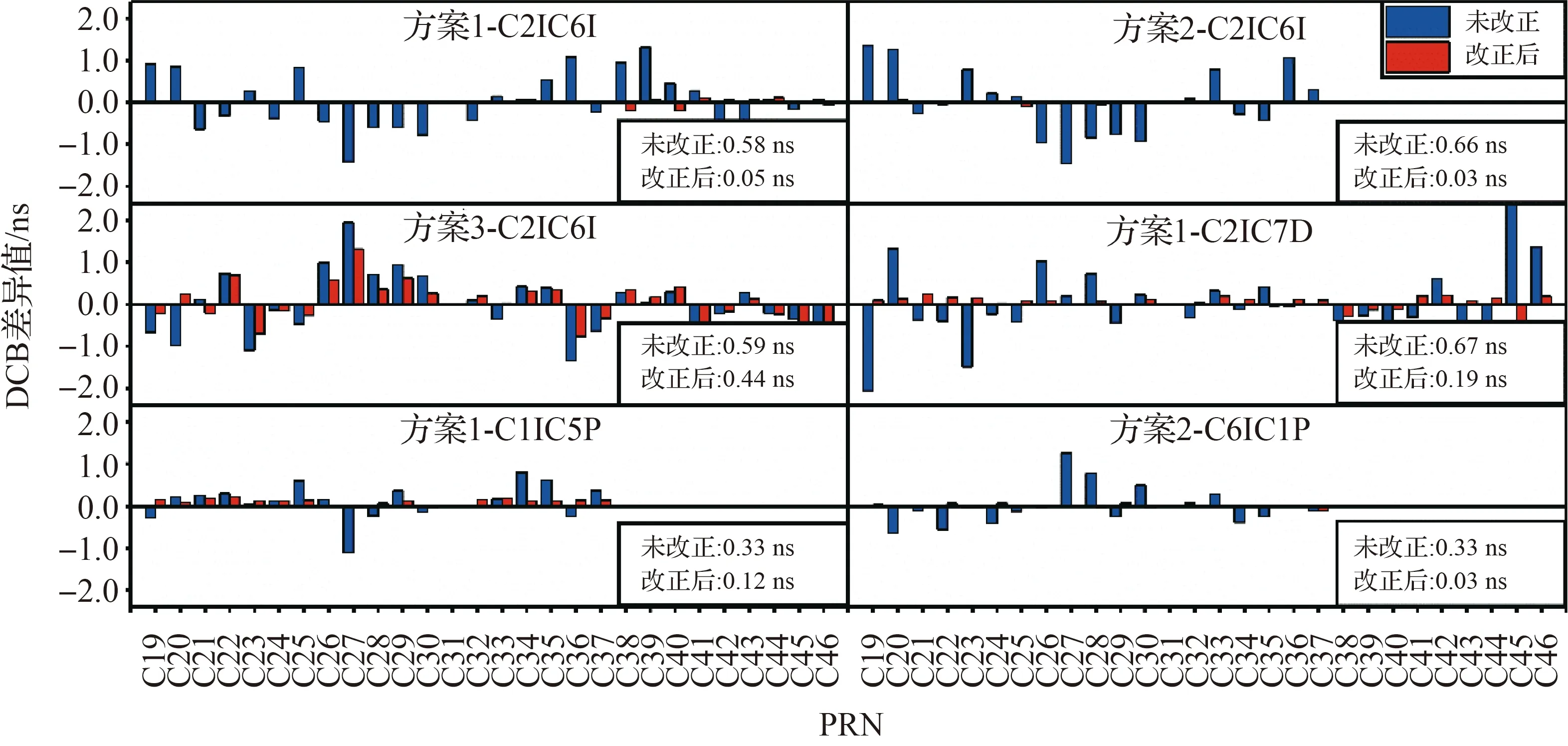
圖5 3種方案估計DCB的差異Fig.5 BDS-3 satellite DCB difference for three cases
圖6給出了15個iGMAS站是否改正本文偽距偏差的單頻偽距定位精度,統(tǒng)計值為各個測站2020年DOY 211—DOY 241的平均RMS值。由圖可知,所有站點水平方向和高程方向定位精度在模型改正后均有不同幅度的提升,水平方向和高程方向模型未改正時平均RMS分別為0.65和1.06 m,模型改正后分別為0.56和0.94 m,精度分別提升了13.9%和11.0%。
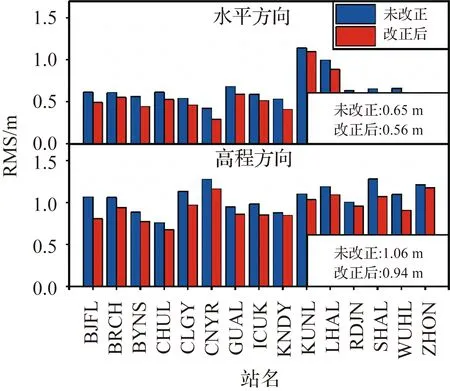
圖6 單頻偽距單點定位精度對比Fig.6 Comparison of single frequency single point positioning
3 結(jié) 論
本文采用iGMAS網(wǎng)與MGEX網(wǎng)數(shù)據(jù)分析不同接收機類型間BDS-3衛(wèi)星偽距偏差特性,試驗結(jié)果表明,不同品牌接收機BDS-3衛(wèi)星偽距偏差存在一定差異,例如TRIMBLE與SEPT兩個品牌接收機C19衛(wèi)星的MW組合和IF組合偽距偏差分別相差約1.1 ns和6.0 ns;而同品牌接收機的BDS-3偽距偏差相對比較一致,且該偽距偏差在一個月內(nèi)較為穩(wěn)定,絕大部分接收機類型的偏差STD優(yōu)于0.1 ns。
根據(jù)偏差特性,本文按接收機類型建立了北斗三號偽距偏差改正模型。通過不同接收機類型估計的衛(wèi)星DCB產(chǎn)品一致性和單頻偽距定位對模型有效性進行了驗證。結(jié)果表明,在未改正本文模型時,使用iGMAS和MGEX網(wǎng)估計的BDS-3衛(wèi)星存在最大0.74 ns的差異,而改正本文的偽距偏差模型后,兩種接收機站網(wǎng)估計的衛(wèi)星DCB一致性得到了顯著提高,其差異小于0.19 ns,相比未改正模型時,衛(wèi)星DCB差異降低了16.3%~91.6%。此外,模型改正后單頻偽距定位水平和高程方向平均RMS值分別降低了13.9%和11.0%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
音樂探索(2022年2期)2022-05-30 21:01:37
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小天使·一年級語數(shù)英綜合(2019年8期)2019-08-27 02:23:00
小學(xué)科學(xué)(學(xué)生版)(2018年7期)2018-08-13 09:33:04
電子制作(2018年11期)2018-08-04 03:25:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19