近海船長(zhǎng)分布建模與雷達(dá)艦船分類(lèi)能力評(píng)估
2021-04-30 02:16:16水鵬朗
西安電子科技大學(xué)學(xué)報(bào) 2021年2期
關(guān)鍵詞:分類(lèi)
李 杉,張 坤,水鵬朗
(西安電子科技大學(xué) 雷達(dá)信號(hào)處理國(guó)家重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710071)
基于合成孔徑雷達(dá)圖像和逆合成孔徑雷達(dá)圖像的海面艦船的分類(lèi)和識(shí)別已經(jīng)被廣泛研究,目前已有很多成熟的識(shí)別方法和技術(shù)[1-4]。由于成像需要較長(zhǎng)的累積時(shí)間,并不適用于大片近海區(qū)域的廣泛無(wú)縫監(jiān)視,高分辨對(duì)海監(jiān)視雷達(dá)需要對(duì)海面艦船具有“粗”分類(lèi)的能力。所謂“粗”分類(lèi),就是把海面艦船按照其長(zhǎng)度L分為大、中、小三類(lèi),常用的分類(lèi)標(biāo)準(zhǔn)為:L≤69 m,為小型船;69 m
對(duì)于目標(biāo)艦船,從其高分辨距離像中提取到的徑向尺寸R為艦船長(zhǎng)度L在雷達(dá)視線方向上的投影[5],航向角φ為雷達(dá)視線方向與船長(zhǎng)方向之間的夾角,三者的關(guān)系為L(zhǎng)=R/cosφ。文獻(xiàn)[5-11]提供了多種雷達(dá)目標(biāo)徑向尺寸的估計(jì)方法,設(shè)徑向尺寸估計(jì)誤差為ε,則船長(zhǎng)估計(jì)值為
(1)
對(duì)于我國(guó)近海艦船粗分類(lèi)的應(yīng)用,感興趣的問(wèn)題是徑向尺寸估計(jì)誤差在何種情況下,能夠滿(mǎn)足工程對(duì)正確分類(lèi)概率的需求。該問(wèn)題的解決與船長(zhǎng)的先驗(yàn)概率分布密切相關(guān),然而,公開(kāi)數(shù)據(jù)中沒(méi)有我國(guó)近海海域船長(zhǎng)分布的數(shù)據(jù)和模型。針對(duì)這一問(wèn)題,在兩周的時(shí)間里通過(guò)中國(guó)船訊網(wǎng)采集了我國(guó)四大海域約30 000艘艦船的自動(dòng)識(shí)別系統(tǒng)信息,從中提取了船長(zhǎng)和航向角等數(shù)據(jù);在該數(shù)據(jù)庫(kù)的基礎(chǔ)上,研究了各海域船長(zhǎng)的統(tǒng)計(jì)建模問(wèn)題。經(jīng)對(duì)比發(fā)現(xiàn),韋布爾分布模型能夠很好地?cái)M合我國(guó)近海船長(zhǎng)分布,且各海域船長(zhǎng)分布的參數(shù)具有明顯差異。在船長(zhǎng)分布的先驗(yàn)?zāi)P拖拢⒘嘶诟叻直婢嚯x像的艦船徑向尺寸估計(jì)誤差與艦船大、中、小正確分類(lèi)概率之間的定量關(guān)系。結(jié)果表明,當(dāng)艦船航向角介于±75°之間時(shí),我國(guó)近海海域艦船的大、中、小正確分類(lèi)概率達(dá)到90%的條件是,艦船徑向尺寸估計(jì)誤差在區(qū)間(-12.67 m,9.41 m)內(nèi)。
1 中國(guó)近海艦船數(shù)據(jù)統(tǒng)計(jì)
中國(guó)近海按照地理位置自北向南分為渤海、黃海、東海、南海四大海域。渤海-黃海分界線為遼東半島南端老鐵山角至山東半島北岸蓬萊角的連線,黃海-東海分界線為長(zhǎng)江口北岸啟東角至濟(jì)州島西南角的連線,東海-南海分界線為廣東南澳島至臺(tái)灣南端鵝鑾鼻之間的連線,如圖1(a)所示。
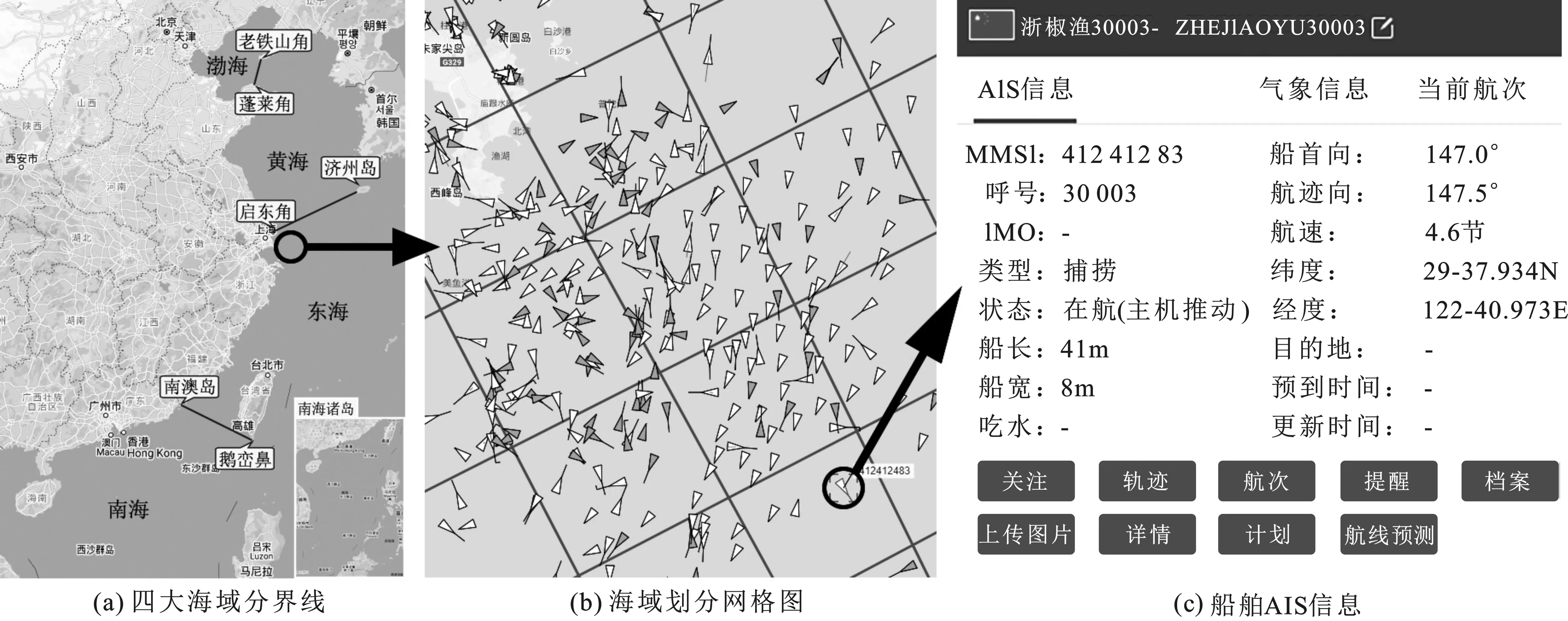
圖1 船訊網(wǎng)四大近海海域艦船信息采集示意圖
數(shù)據(jù)采集基于中國(guó)船訊網(wǎng)的即時(shí)船舶自動(dòng)識(shí)別系統(tǒng)(Automatic Identification System,AIS)信息[12]。采集范圍為渤海整體,南海十段線以?xún)?nèi),黃海、東海距離領(lǐng)海基線200海里以?xún)?nèi)的海域(即專(zhuān)屬經(jīng)濟(jì)區(qū))。由于海上艦船數(shù)量繁多,分布密集,為便于采集,將海域劃分為若干網(wǎng)格,以網(wǎng)格為單位進(jìn)行采集和統(tǒng)計(jì),如圖1(b)所示(以東海舟山群島的一小片海域?yàn)槔?。采集時(shí)間自2020年3月中旬至3月底。由于采集期間艦船的位置會(huì)動(dòng)態(tài)更新,為防止重復(fù)統(tǒng)計(jì),可以艦船首次出現(xiàn)所在的海域?yàn)闇?zhǔn)。刪除重復(fù)條目,共采集了 30 584 艘艦船的AIS信息。AIS信息包括船長(zhǎng)、船寬、類(lèi)型等靜態(tài)信息和吃水、經(jīng)緯度等動(dòng)態(tài)信息,如圖1(c)所示。所采集的艦船長(zhǎng)度范圍在1~400 m。
表1列出了采集的各海域大、中、小型艦船的數(shù)目。如圖2所示,東海艦船占比最高,其次是南海、黃海、渤海;小型船占73%,中型船占19%,大型船僅占8%。
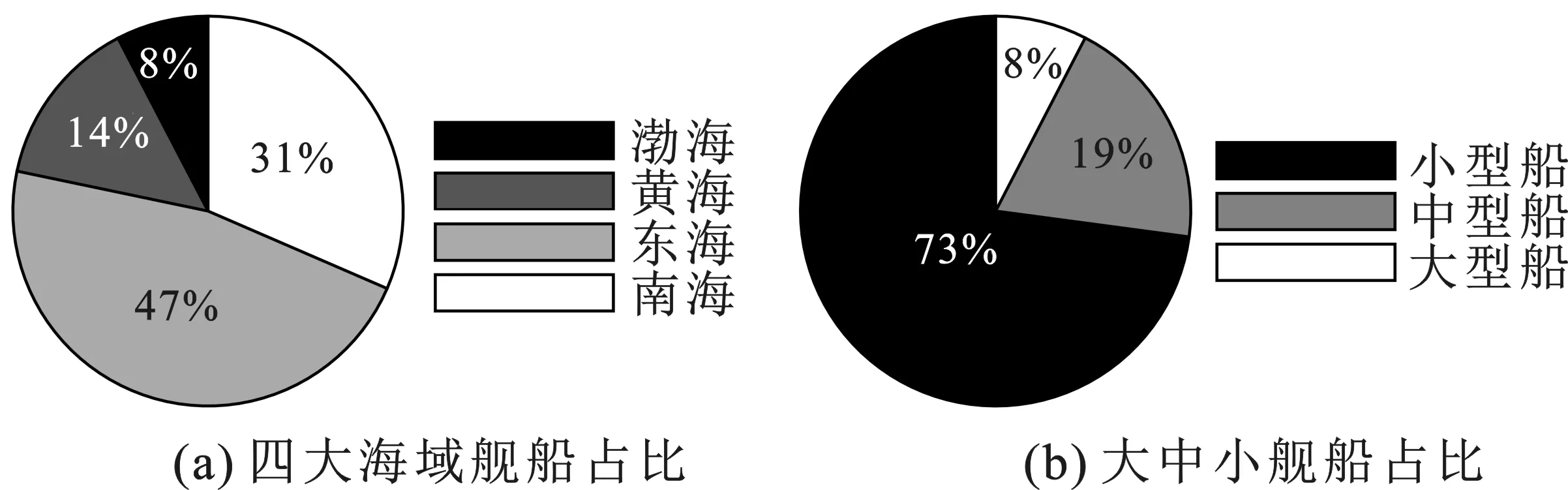
圖2 采集的艦船分布占比圖
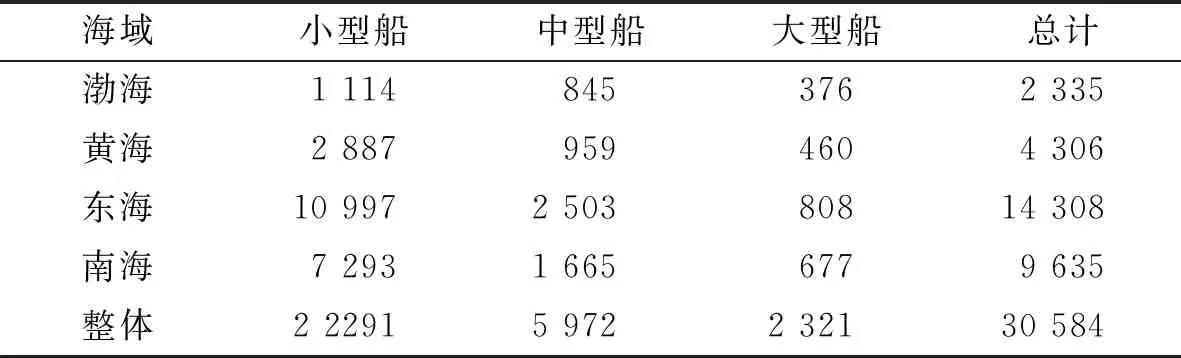
表1 采集的艦船數(shù)量統(tǒng)計(jì) 艘
將艦船AIS信息中的航向角數(shù)據(jù)映射到±90°的范圍,繪制為圖3所示的直方圖。可以看出,φ在該區(qū)間內(nèi)均勻分布。根據(jù)式(1),當(dāng)φ→90°時(shí),ε/cosφ→+∞,此時(shí)估計(jì)的值實(shí)際上是船寬,而并非為艦船的徑向尺寸,船長(zhǎng)的估計(jì)值會(huì)產(chǎn)生過(guò)大的絕對(duì)誤差。因此,工程通常將航向角限制在±75°以?xún)?nèi)。
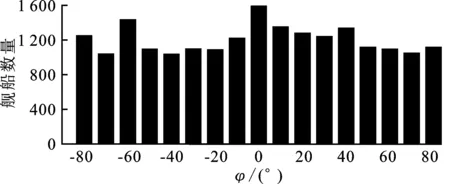
圖3 我國(guó)近海艦船航向角分布直方圖
為了能夠直觀地看出我國(guó)近海海域船長(zhǎng)分布特征,以選取合適的分布模型,將采集到的船長(zhǎng)樣本數(shù)據(jù)經(jīng)過(guò)處理,繪制為如圖4所示的經(jīng)驗(yàn)概率密度曲線。
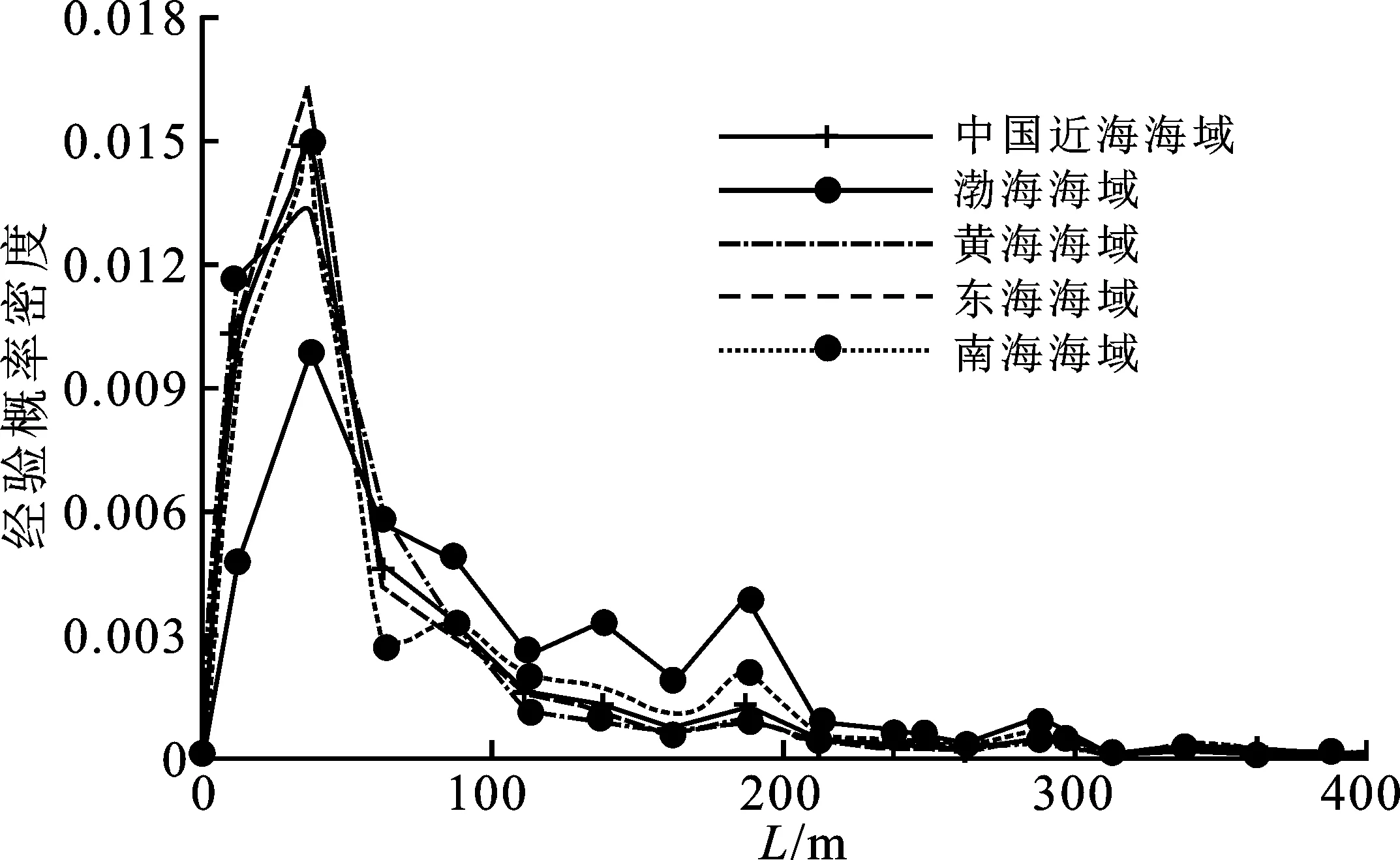
圖4 船長(zhǎng)樣本經(jīng)驗(yàn)概率密度曲線
經(jīng)觀察,樣本的經(jīng)驗(yàn)概率密度曲線為正值的分布,具有單峰、右偏的特性,有較長(zhǎng)拖尾,與瑞利分布、韋布爾分布、K-分布的概率密度函數(shù)曲線的特征相似。因此,擬采用這3種分布模型分別對(duì)我國(guó)近海船長(zhǎng)分布進(jìn)行擬合。此外,我國(guó)近海船長(zhǎng)的分布可能會(huì)有一些季節(jié)性的變化,這種變化的掌握需要依靠更大量的不同時(shí)間區(qū)間的數(shù)據(jù)收集。
2 船長(zhǎng)分布的擬合
2.1 幾種分布模型及參數(shù)估計(jì)
根據(jù)船長(zhǎng)樣本的經(jīng)驗(yàn)概率密度曲線的特點(diǎn),考慮了3種類(lèi)型的常用分布:瑞利分布、韋布爾分布和K-分布。各分布的參數(shù)可以通過(guò)樣本的k階原點(diǎn)矩進(jìn)行估計(jì),即
(2)

(3)
其中,σ為尺度參數(shù)。隨著σ的增大,f(x)曲線變得平緩,峰值變小,波峰右移,拖尾變長(zhǎng)。該參數(shù)可以通過(guò)樣本的一階原點(diǎn)矩估計(jì),其估計(jì)值的表達(dá)式為
(4)
韋布爾分布是指數(shù)分布的推廣,通過(guò)尺度參數(shù)和形狀參數(shù)聯(lián)合控制概率密度的形狀和拖尾,具有更強(qiáng)的數(shù)據(jù)擬合能力。其概率密度函數(shù)的表達(dá)式為
(5)
其中,σ為尺度參數(shù),ν為形狀參數(shù)。當(dāng)ν=1時(shí),其為指數(shù)分布;當(dāng)ν=2時(shí),為瑞利分布。兩個(gè)參數(shù)可以通過(guò)樣本的一、二階原點(diǎn)矩求解非線性方程組而得到。參數(shù)估計(jì)的方程組為
(6)
其中,Γ(·)為伽馬函數(shù)。非線性方程組難以獲得兩個(gè)參數(shù)的解析解,但可以通過(guò)數(shù)值計(jì)算方法快速求解。
另一種廣泛使用的雙參數(shù)分布是K-分布,其概率密度函數(shù)的表達(dá)式為
(7)
其中,σ為尺度參數(shù),ν為形狀參數(shù),Kν-1(·)為ν-1階的第二類(lèi)修正貝塞爾函數(shù)。當(dāng)ν→∞時(shí),K-分布趨于瑞利分布。K-分布的兩個(gè)參數(shù)可以通過(guò)2-4階矩、1-2-3階矩、分?jǐn)?shù)階矩等多種方法進(jìn)行估計(jì)[13-14],其中最常用的2-4階樣本矩估計(jì)的表達(dá)式為
(8)
(9)
2.2 船長(zhǎng)分布擬合與評(píng)價(jià)
以渤海海域?yàn)槔褂脜?shù)估計(jì)擬合所得的3種分布的概率密度曲線與船長(zhǎng)樣本的經(jīng)驗(yàn)概率密度曲線如圖5所示。
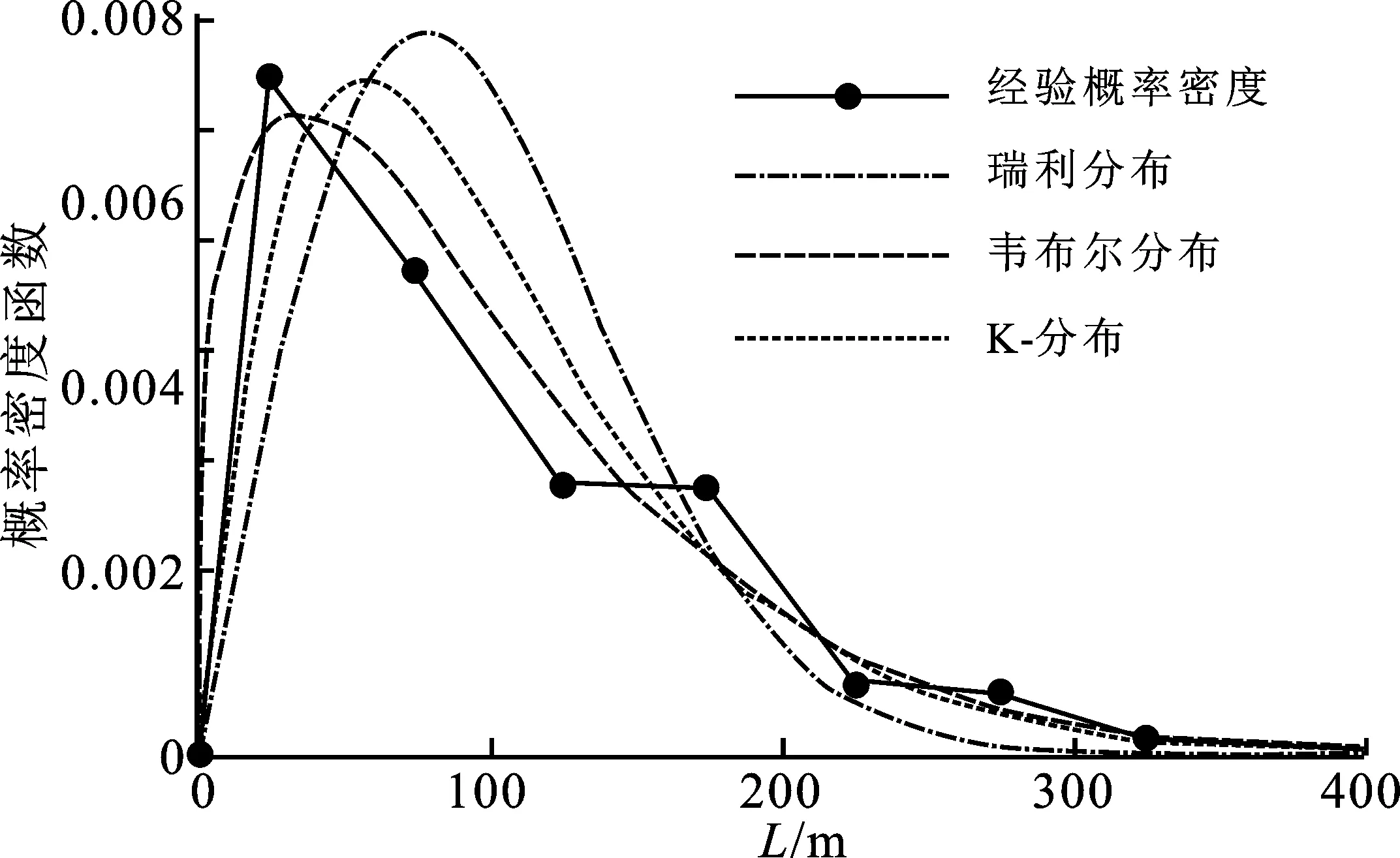
圖5 渤海海域3種分布模型的擬合效果
可以看出,韋布爾分布的擬合效果優(yōu)于K-分布和瑞利分布。為了定量地對(duì)比3種分布模型對(duì)船長(zhǎng)分布的擬合能力,采用擬合分布與經(jīng)驗(yàn)分布之間的Kolmogorov-Smirnov(K-S)距離評(píng)價(jià)擬合的效果,K-S距離越小,則擬合質(zhì)量越高。兩者的K-S距離通過(guò)下式計(jì)算[15],即
(10)
其中,F(xiàn)0(xi)表示經(jīng)參數(shù)估計(jì)擬合所得的累積分布函數(shù),F(xiàn)n(xi)為從樣本得到的經(jīng)驗(yàn)累積分布函數(shù)。
表2列出了3種分布對(duì)各海域船長(zhǎng)進(jìn)行擬合的K-S距離。可以看出,在所有情況下,韋布爾分布擬合的K-S距離都是最小的。因此,選用韋布爾分布模型對(duì)我國(guó)近海船長(zhǎng)的分布進(jìn)行擬合。
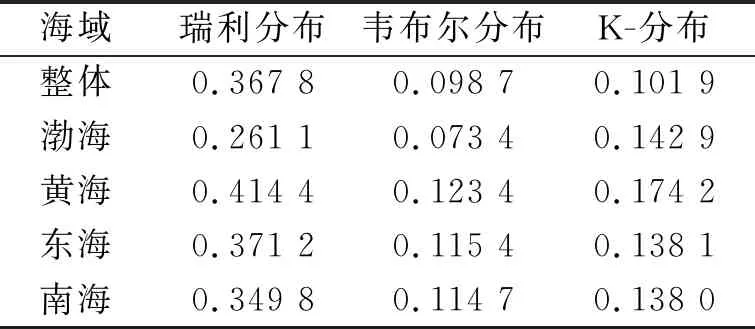
表2 K-S距離
表3列出了韋布爾分布模型對(duì)各海域船長(zhǎng)擬合所得的形狀參數(shù)及尺度參數(shù),其擬合曲線如圖6所示。
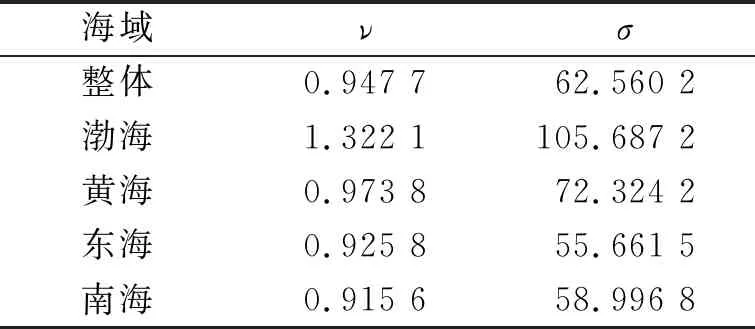
表3 韋布爾分布模型參數(shù)
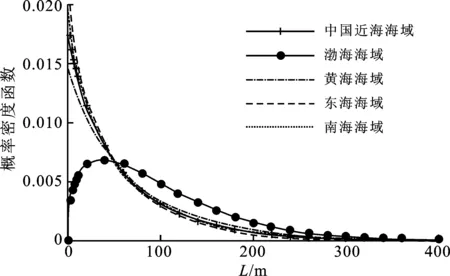
圖6 我國(guó)近海及四大海域船長(zhǎng)韋布爾分布模型擬合曲線
由以上擬合結(jié)果可看出,我國(guó)近海和黃海、東海、南海海域船長(zhǎng)分布差異較小,形狀參數(shù)ν<1,分布曲線接近于指數(shù)分布。相比其他海域,渤海海域ν>1,大、中型船所占比重更大。基于不同海域的船長(zhǎng)分布先驗(yàn)概率模型,能更精確地分析和評(píng)估不同海用雷達(dá)和艦船徑向尺寸估計(jì)方法的艦船粗分類(lèi)能力。
3 雷達(dá)艦船分類(lèi)性能評(píng)估
由于基于高分辨距離像的艦船粗分類(lèi)主要依靠徑向尺寸估計(jì)來(lái)完成[5-11],而徑向尺寸估計(jì)通常是有偏差的,偏差的大小與雷達(dá)參數(shù)、雷達(dá)工作模式、航向角、估計(jì)方法的精度等多種因素有關(guān)。這里通過(guò)給出正確分類(lèi)概率達(dá)到要求時(shí)容許的徑向尺寸估計(jì)誤差范圍,對(duì)雷達(dá)艦船粗分類(lèi)能力進(jìn)行評(píng)估。
3.1 正確分類(lèi)概率計(jì)算
根據(jù)式(1)所表示的基于高分辨距離像的徑向尺寸和航向角的船長(zhǎng)估計(jì),在航向角φ服從均勻分布,限制關(guān)注的角度范圍在[-75°,75°](該范圍之外,艦船相對(duì)于雷達(dá)接近切向航行,徑向尺寸難以有效估計(jì)船長(zhǎng)),并給定徑向尺寸估計(jì)誤差ε的情況下,某海域艦船的大、中、小正確分類(lèi)概率可表示為

(11)
其中,fL(L)為該海域船長(zhǎng)分布的概率密度函數(shù);θS(L,ε)、θM(L,ε)和θL(L,ε)分別表示船長(zhǎng)為L(zhǎng)、徑向尺寸估計(jì)誤差為ε時(shí),艦船被正確判決為小、中、大型船的條件概率,該概率僅與航向角可取值的范圍相關(guān)。
首先分析小型船被正確判決的條件概率。顯然,當(dāng)徑向尺寸欠估計(jì)(ε<0)時(shí),小型船總是被正確分類(lèi);當(dāng)徑向尺寸過(guò)估計(jì)(ε>0)時(shí),小型船的正確分類(lèi)概率是船長(zhǎng)的分段函數(shù),函數(shù)θS(L,ε)的定義式為
(12)

(13)
對(duì)于大型船,情況正好相反。當(dāng)徑向尺寸過(guò)估計(jì)時(shí),大型船總是被正確分類(lèi);當(dāng)徑向尺寸欠估計(jì)時(shí),大型船的正確分類(lèi)概率是船長(zhǎng)的分段函數(shù)。同理,可推得函數(shù)θL(L,ε)的表達(dá)式為
(14)
對(duì)于中型船,需要分兩種情況討論。當(dāng)徑向尺寸欠估計(jì)時(shí),會(huì)出現(xiàn)將中型船錯(cuò)判為小型船的情況,中型船的正確分類(lèi)概率是船長(zhǎng)的分段函數(shù),函數(shù)θM(L,ε)的表達(dá)式為
(15)
當(dāng)徑向尺寸過(guò)估計(jì)時(shí),會(huì)出現(xiàn)將中型船錯(cuò)判為大型船的情況,中型船的正確分類(lèi)概率是船長(zhǎng)的分段函數(shù),函數(shù)θM(L,ε)的表達(dá)式為
(16)
根據(jù)式(13)~(16),對(duì)任意給定的徑向尺寸估計(jì)誤差,都能夠根據(jù)船長(zhǎng)的先驗(yàn)概率分布計(jì)算出艦船的大、中、小正確分類(lèi)概率。基于該概率,能夠?qū)走_(dá)或徑向尺寸估計(jì)方法的艦船大、中、小分類(lèi)能力進(jìn)行評(píng)估。
3.2 艦船分類(lèi)能力評(píng)估
給定徑向尺寸估計(jì)誤差ε,并代入式(13)~(16),再將表3中指定海域的形狀參數(shù)、尺度參數(shù)代入式(5),最后代入式(11)進(jìn)行積分計(jì)算,即可得出該海域在誤差為ε時(shí)的正確分類(lèi)概率。由此,繪制出了各海域艦船大、中、小正確分類(lèi)概率與徑向尺寸估計(jì)誤差的依賴(lài)曲線,如圖7所示。
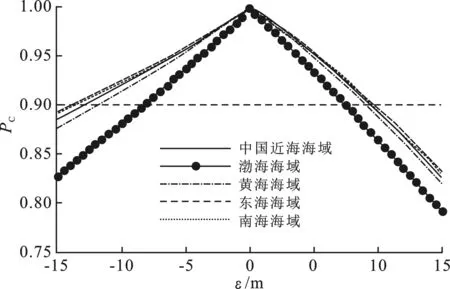
圖7 各近海海域正確分類(lèi)概率和徑向尺寸估計(jì)誤差的依賴(lài)曲線
由圖7可以看出,當(dāng)ε=0時(shí),PC=1,PC隨著|ε|的增大而減小。圖像關(guān)于ε=0左右不對(duì)稱(chēng),且過(guò)估計(jì)對(duì)PC的影響略大于欠估計(jì)的影響,這是由于海上小型船所占比重或先驗(yàn)概率較大,而小型船的正確分類(lèi)概率僅受到過(guò)估計(jì)影響的緣故。各海域的情況因船長(zhǎng)先驗(yàn)概率分布參數(shù)的差異而有所不同:我國(guó)近海海域的ε在區(qū)間(-12.67 m,9.41 m)時(shí),PC能夠達(dá)到90%及以上;渤海PC達(dá)到90%的要求最高,ε需在區(qū)間(-8.14 m,7.34 m)內(nèi);而東海的要求最低,ε需在區(qū)間(-13.87 m,9.75 m)內(nèi);黃海和南海的ε需分別在區(qū)間(-11.52 m,8.96 m)和(-13.25 m,9.61 m)內(nèi)。對(duì)于高分辨雷達(dá),徑向尺寸估計(jì)誤差總是不小于其距離分辨率的一半。因此,艦船正確分類(lèi)概率達(dá)到90%的必要條件之一是,雷達(dá)距離分辨率小于14.68 m(渤海)。
此外,由于徑向尺寸估計(jì)中的距離副瓣擴(kuò)展作用,徑向尺寸估計(jì)誤差的分布往往依賴(lài)于具體的估計(jì)方法[5]。一般來(lái)說(shuō),直接回波前后沿的估計(jì)會(huì)產(chǎn)生嚴(yán)重的船長(zhǎng)過(guò)估計(jì),難以滿(mǎn)足正確分類(lèi)概率達(dá)到90%的要求。文獻(xiàn)[5]提出的基于線性規(guī)劃的徑向尺寸估計(jì)方法考慮了抑制距離旁瓣效應(yīng)的影響的問(wèn)題,目標(biāo)艦船實(shí)測(cè)數(shù)據(jù)的平均估計(jì)誤差在6.13 m以?xún)?nèi)(雷達(dá)距離分辨率為0.75 m)。按照本章的分類(lèi)性能評(píng)價(jià)方法,其正確分類(lèi)概率能夠達(dá)到93%。
3.3 航向角估計(jì)誤差對(duì)船長(zhǎng)估計(jì)的影響
高分辨對(duì)海監(jiān)視雷達(dá)通常通過(guò)對(duì)目標(biāo)航跡進(jìn)行擬合的方法得到航向角的估計(jì)[8,16-17],其估計(jì)誤差是影響船長(zhǎng)估計(jì)的因素之一。根據(jù)式(1)可得,船長(zhǎng)的估計(jì)誤差可以用徑向尺寸和航向角估計(jì)誤差近似表示為
(17)
即航向角誤差對(duì)船長(zhǎng)估計(jì)產(chǎn)生的最大誤差為|Ltan 75° Δφ|。對(duì)于長(zhǎng)時(shí)間穩(wěn)定跟蹤的艦船,其航向角精度很高。以其精度Δφ=0.2°為例,其對(duì)小型船產(chǎn)生的最大誤差為0.9 m,對(duì)中型船產(chǎn)生的最大誤差為 2.3 m,對(duì) 200 m 的大型船產(chǎn)生的最大誤差為2.6 m。因此,航向角估計(jì)誤差對(duì)分類(lèi)性能有影響,但對(duì)穩(wěn)定跟蹤的艦船影響不明顯。
4 結(jié)束語(yǔ)
對(duì)于工作在掃描狀態(tài)下的高分辨海用雷達(dá),艦船的大中小分類(lèi)是其需要具備的基本功能之一。雷達(dá)艦船分類(lèi)能力的評(píng)估依賴(lài)于海域內(nèi)艦船長(zhǎng)度的先驗(yàn)分布、雷達(dá)的距離分辨能力以及艦船徑向尺寸估計(jì)的精度。筆者在統(tǒng)計(jì)我國(guó)近海四大海域艦船長(zhǎng)度數(shù)據(jù)的基礎(chǔ)上,建立了艦船長(zhǎng)度的先驗(yàn)概率模型,基于該模型分析了艦船大、中、小正確分類(lèi)概率和徑向尺寸估計(jì)誤差之間的定量關(guān)系,為海用雷達(dá)參數(shù)設(shè)置和不同船長(zhǎng)估計(jì)方法的性能評(píng)估提供了重要參考和依據(jù)。
猜你喜歡
西北民族大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年4期)2021-12-29 02:54:24
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫(huà)刊(2020年4期)2020-06-08 15:48:10
學(xué)生天地(2019年32期)2019-08-25 08:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
