并聯機器人正運動學與NURBS 軌跡規劃
2021-04-30 08:26:52張皓宇劉曉偉
機械設計與制造 2021年4期
張皓宇,劉曉偉,任 川,趙 彬
(1.遼寧省氣象信息中心,遼寧 沈陽 110168;2.沈陽新松系統自動化股份有限公司,遼寧 沈陽 110168;3.東北大學信息科學與工程學院,遼寧 沈陽 110819)
1 引言
并聯機構學理論研究蓬勃發展,并聯機器人的運動學理論也不斷得到豐富[1-3]。并聯機器人是一種具有高載荷自重比的封閉式運動結構,適用于制造、飛行仿真系統和醫療機器人等領域。機械手是一組運動連桿或鏈條的集合,這些連桿或鏈條連接在一起形成一個能夠完成特定任務的機構[4]。典型的任務包括取放操作、模仿人類動作和在危險區域操作。機器人具有兩種基本設計,串聯和并聯,在運動學上是不同的。串聯式機械手是由一系列端到端的運動環節連接而成的開環結構,代表了當今大多數結構類似于人類手臂的機器人機械手[5]。并聯機器人又稱并聯機器人、并聯機器人是一種閉環運動結構。一般來說串聯機器人正運動學求解容易,逆運動學相對較難。雖然串行機械手由于其開環運動結構,易于理解,但不適用于快速分揀、小范圍搬運等場合。并聯機器人逆運動學求解容易,正運動學處理很難有通用解決辦法。機械上,并聯機器人由帶有末端執行器的移動平臺組成,末端執行器通過三個或更多的鉸接鏈接連接到基座,每個鏈路在鏈路基座附近都有一個線性驅動器。并聯機器人都很適合這些快速高自重比的應用,在最終定位的末端執行器提供了更高的精度。
任何串行或并聯機器人都存在兩類運動學問題:逆運動學問題(IKP)和正運動學問題(FKP)[6]。目前的FKP 求解策略依賴于迭代方法,迭代方法計算開銷大,耗時長,且不能進行最優的實時操作。針對FKP 問題,提出了一種利用改進形式的多層感知器進行反向傳播學習的神經網絡將問題的求解精度提高到預期水平,并能實時求解。再次,研究了建立NURBS 曲線相關步驟相關技術,建立了NURBS 曲線并將其運用到并聯機器人軌跡插補中,它可以處理任何類型的幾何圖形。NURBS 分段點定義為加速度在零方向上變化的過渡點。求解了運動學和NURBS 曲線問題,建立機構的位置、速度、加速度與連桿長度、角度等機構參數之間的關系,為后續并聯機器人快速分揀提供了保障。
2 機械臂構成
工業機器人傳統上是一種開鏈的機構,其連桿通常是串聯的[7-8]。開放式運動鏈機器人通常具有較長的臂長、較大的工作空間和較好的機動性能。然而,懸臂式機械手本身的剛性較差,在高速、高動載工況下的動態性能較差。而并聯機器人特別是自動裝配,快速分揀,高自重比和高精密機械加工工裝夾具組裝就顯得尤為重要,也是研發人員一直努力尋找的有效解決方案。
并聯機器人機構圖,如圖1 所示。基于閉合運動鏈概念的可選機械手設計研究取得了一定的進展,與傳統的開放式運動鏈機械手相比,具有以下優點:由于缺少懸臂式結構,使得剛性和精度更高,對于執行機構的數量具有較高的力/扭矩能力,因為執行機構是并聯而不是串聯布置的,而且逆運動學相對簡單,這是實時計算機在線控制的優勢。閉環運動鏈機器人在工作空間和可操作性要求低、動載荷大具有廣闊的應用前景。

圖1 并聯機器人機構圖Fig.1 Mechanism Diagram of Parallel Robot
3 機械臂運動學分析
并聯機器人正解解決的是從機器人關節到機器人末端姿態的傳遞關系,反解解決的是從機器人末端姿態到機器人關節角的傳遞關系,正反解是解決機器人在空間運動的關節角和空間位姿的傳遞關系。在數學上,雖然并聯機器人的IKP 有一個封閉的數學解,但是FKP 缺少一個封閉的解[9-10]。一般來說,FKP 表示一個待定問題,其中方程的數量小于未知數的數量。此外,運動學公式的高度非線性也增加了計算的復雜性。IKP 將任務空間映射到關節空間,根據機械手的最終位置和方向,找到關節角度或連桿長度。在數學上,IKP 建立了這樣一個映射函數:{task space}{joint space}。FKP 將關節空間映射到任務空間,根據給定的關節角度或長度集找到最終的位置和方向。FKP 的求解需要完成運動控制系統的反饋回路,即FKP 指示是否已經到達工作區中所需的點。目前的FKP 求解策略依賴于迭代方法,迭代方法計算開銷大,耗時長,且不能進行最優的實時操作。
3.1 機械臂運動學反解

圖2 第i 分支的關節角和桿長的示意圖Fig.2 Schematic Diagram of Joint Angle and Bar Length of Branch i
圖中:(xk,yk,zk)—o-xyz坐標系中的物理坐標;r—動平臺的外接圓半徑;R—固定平臺的外接圓半徑;i、θij—第i支鏈上的第j桿的桿長和轉角。
首先,F1和F2組成一個球形副,所以:首先,沿y軸平移L12;然后,繞x軸旋轉θ12;最后,繞y軸旋轉(θ1+θ11-90°),整理得:
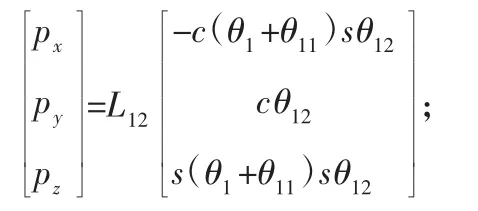
設末端執行器中心的坐標為(xtcp ytcp ztcp),這樣可以獲得位置變換的坐標公式:
3.1.1 消元法反解
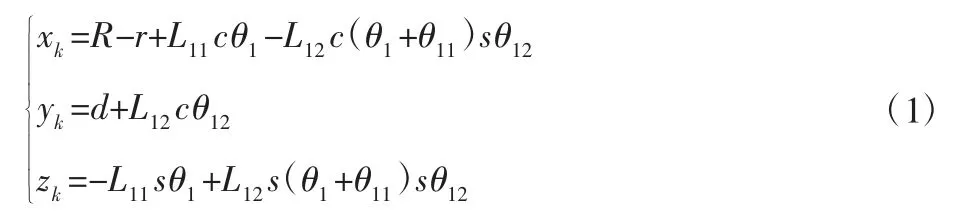
求解θ1,整理方程式:
3.1.2 歸一解
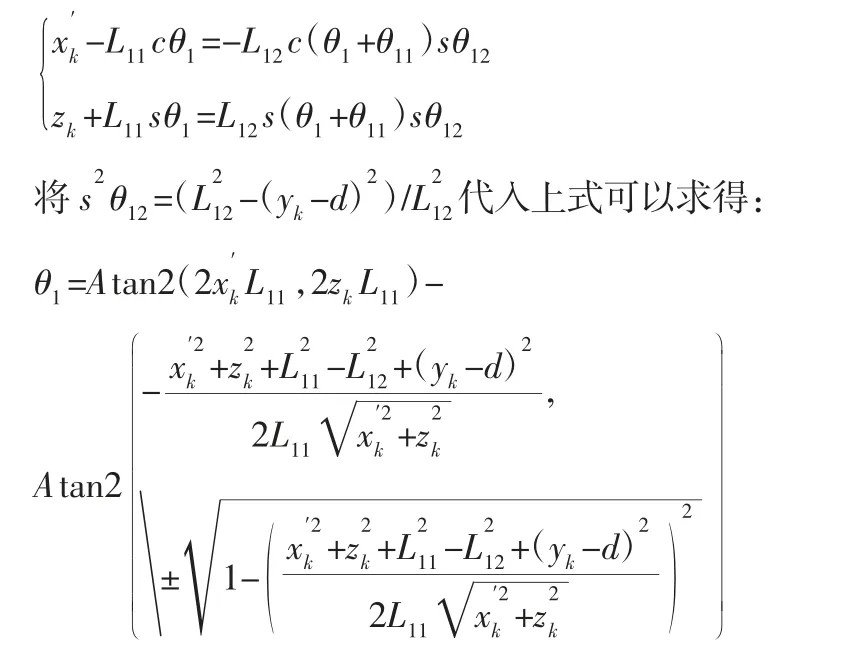
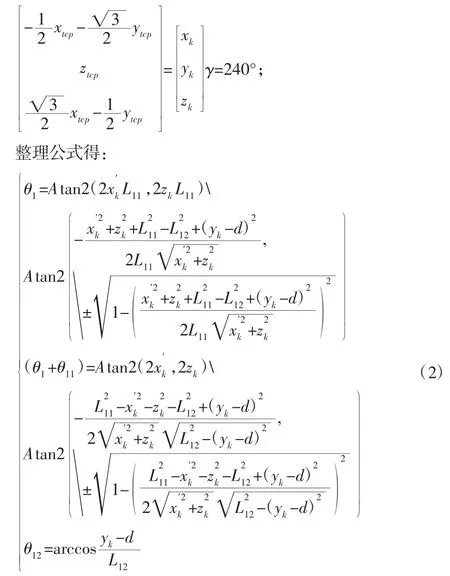
根據上面第一支鏈的結論,可以得到并聯機器人運動學反解的歸一解(通用解):

3.3 機械臂運動學正解
目前并聯機器人正解析解決辦法有幾類方法:分析方法、迭代方法、使用額外的傳感器和神經網絡的方法[11-13]。在并聯機械手末端安裝額外的傳感器,以獲得更多關于系統(機械手)狀態的信息,有助于快速方便地解決FKP。傳感器的額外成本使得這成為解決FKP 最不理想的方法。在迭代方法中,運動學問題被公式化,因此它可以使用任何可用的數值技術來求解。然而,這些數值技術是計算密集型的,并不能保證一個解決方案。本節介紹了一些并聯機器人構型的神經網絡求解FKP 方案。神經網絡正運動學的目標是設計一種方法,適用于所有類別的并聯機器人,減少計算資源的使用、實時快速執行。
3.3.1 神經網絡概述
基于神經網絡求解FKP 的分析方法不僅限于并聯機器人的特殊結構,可以推廣到其他類型的并聯機器人。神經元處理單元對修改后的信號進行求和,并將該值應用于線性或非線性激活函數。然后,產生的信號或值被傳送到輸出單元。輸入、權重、體系結構和閾值都是神經網絡器可以控制的參數。
一旦確定了神經網絡的體系結構,就可以通過訓練或學習過程來設置權重值。在網絡訓練中,神經網絡的自由參數(權值)是通過環境的連續刺激過程來適應網絡的。環境刺激是從該環境的不同狀態獲得的輸入—輸出數據值。在訓練過程中,系統地更新自由參數,使其值收斂到最優值。自由參數更新的大小由一個稱為學習率的因素控制。何時停止訓練取決于預先定義的條件,如達到最大期望的訓練時間和最低錯誤率等。
3.3.2 神經網絡逆解
神經網絡類似于人腦學習的過程,神經網絡參數的準確性和學習數據量的多少有很大的關系。輸入為并聯機器人關節的角度值經過神經網絡模塊輸出為機器人的末端的位置和姿態,如圖3 所示。運動學簡化模型示意圖可以得到:

圖3 運動學簡化模型Fig.3 Simplified Kinematics Model
整理公式可以得到:

根據上面所述的非線性方程組,采用三層BP 神經網絡方法對并聯機器人運動學進行正向求解。根據并聯機器人的外觀結構構型,建立基于神經網絡的并聯機器人非線性方程。神經網絡拓撲結構共分為三層,輸入層共有3 個神經元,輸出層有4 個神經元,如圖4 所示。可經由下式將機器人正運動學的非線性映射轉換為線性映射,設N個樣本為(Pj,αj),其中j=1,2,…,N。Pj為網絡輸入向量,作為第j個位置樣本,αj作為第j個電機轉角為網絡輸出向量。

式中:wi—隱含層的節點i與輸入層的權值;a1i—隱含層的節點i與輸入層的閾值;wk—輸出層與隱含層間的權值;a2k—輸出層與隱含層間的閾值。

圖4 三層前向神經網絡結構Fig.4 Three-Layer Feedforward Neural Network Structure
將并聯機器人運動控制過程中產生的位置和關節角度進行保存,作為大量樣本輸入訓練后,可以獲得機器人關節角度到機器人末端位置的運動學正描述,即可根據建立的非線性方程和權重從而得到并聯機器人正解。
4 NURBS 的軌跡規劃
在數控控制器的軌跡規劃中,最大加速度和最大顛簸的控制是非常重要的,因為它在很大程度上影響著機器人運動穩定性。線性插補器和圓形插補器的典型問題包括:處理大量短節段需要過多的數據傳輸和加工時間。線段連接處的速度不連續明顯,傳統的方法已不能滿足當前制造業對高速高精度加工的要求。
4.1 樣條曲線類型概述
在變進給量控制中,NURBS 曲線上每個采樣點的進給量是根據該點的曲率和允許的弦誤差確定的。然后在泰勒展開中使用這個進給量來確定下一個采樣點。眾所周知,進給速度必須根據軌跡的曲率變化而變化,在高速加工中應盡可能快地保持進給速度。同樣,當一個彎曲區域之后是一個平坦區域時,也有必要確定速度開始增加的點。
在加工過程中,通過刀具路徑規劃將參數曲面離散成一組參數曲線,然后執行軌跡規劃對每條曲線進行插值。參數曲線有不同的表示形式,NURBS 曲線由于其計算速度快、計算穩定性好,已被許多CAD/CAM 系統用作基本幾何表示。提出了一種NURBS 曲線插補的綜合插補方案。以NURBS 曲線為例,對所開發的軌跡規劃進行了逐步測試。該曲線由直線段和任意曲線段在銳角處連接而成。傳統的機器人運動規劃只提供線性和圓形插補器,使用線性化的線段序列來逼近曲線。這種傳統的方法由于分割導致進給量波動較大,并產生較大的數據文件。對于一般參數曲面運動控制,該方法效率低,易產生誤差。
4.2 NURBS 樣條曲線規劃步驟
由于這種運動規劃是實時實現的,因此開發了特定的算法來計算每個采樣間隔的進給量和采樣點。NURBS 樣條曲線擬合過程如下:
(1)節點參數ui計算過程(累計弦長法)


到此,B樣條曲線就擬合出來了。接下來需要對曲線進行數據點的密化,好讓機器人周期性走到各個密化點,一般采取泰勒展開的方式密化。
5 實驗
5.1 運動控制實驗
為了實現機械手的實時軌跡控制,討論的正,逆運動學一般必須在線計算。驗證了并聯機器人正運動學的正確性,如圖5(a)~圖5(b)所示。在機械臂的運動學分析中,將給定的執行機構坐標轉換為直角坐標的正逆運動學都是必要的,該策略在不到兩次迭代和0.02 s 的執行時間內,位置和方向參數的精度分別接近0.01mm 和0.01°。

圖5 正弦與圓弧跟蹤曲線示意圖Fig.5 Sine and Arc Tracking Curve Diagram
5.2 NURBS 樣條曲線實驗
NURBS 插補器在插補過程中既能在大部分時間內實現均勻進給,又能在每一個插補點都能在規定的誤差范圍內。曲線的尖角或進給敏感角,避免高頻分量或含有與插補軌跡中機器固有頻率匹配的頻率分量和高抖動,如圖6 所示。在軌跡規劃方法中,提出了一種檢測NURBS 曲線尖角的前瞻模塊。在此基礎上,采用加減速方法進行了修正,滿足機器人的加減速能力。
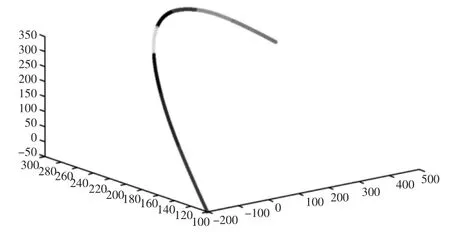
圖6 NURBS 樣條曲線示意圖Fig.6 NURBS Spline Diagram
5.3 實際抓取運動實驗
為了實際驗證并聯機器人運動控制正確性,為并聯機器人運動抓取實驗,如圖7(a)~圖7(b)所示。依靠千分表可以進行測試,得并聯機器人重復定位精度(±0.05)mm,運動速度快,拾放節拍120 次/min。并聯機器人為生產線系統提供了穩定運動控制功能,并聯機器人準確識別并同步跟蹤傳輸線上高速運動的產品,在高速運動中連續抓取多包產品,然后整齊的擺放到包裝箱中。
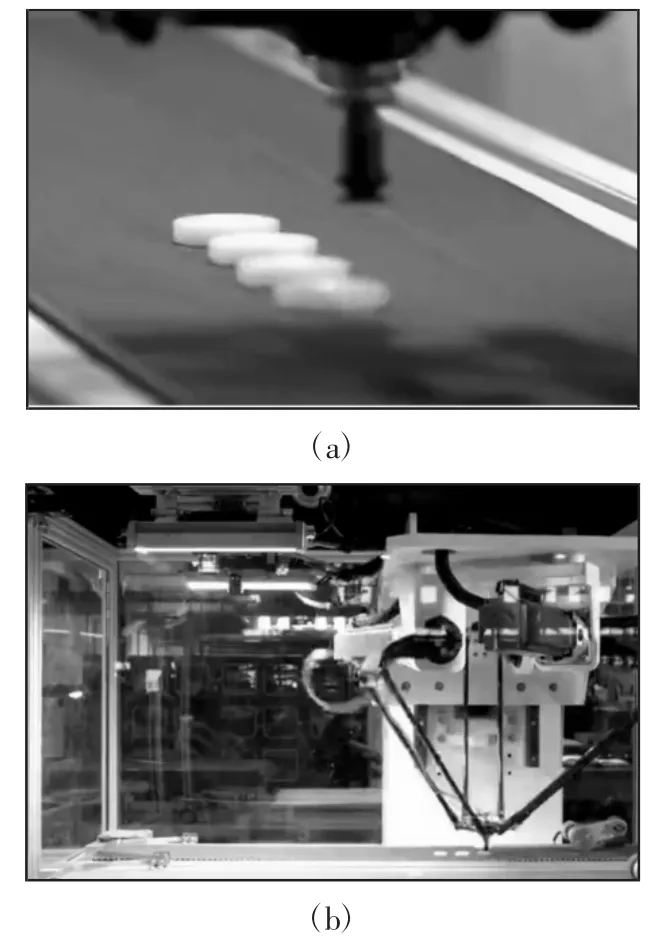
圖7 運動抓取示意圖Fig.7 Motion Grab Diagram
6 結論
針對并聯機器人運動控制與NURBS 軌跡規劃問題,提出了神經網絡正運動學控制與NURBS 軌跡規劃控制方法。并聯機器人FKP 的求解是閉環控制系統的關鍵,由于缺乏一種封閉形式的數學解,提出了神經網絡解決運動學正解通用逼近器。在該模型中,輸入端接收信號將其傳輸到神經元處理單元,在神經元處理單元中,信號通過權值乘法進行修改。然后提出了一種NURBS曲線插補的綜合插補方案,同時滿足給定速度和弦長精度的要求。用NURBS 樣條擬合方法對插補后的進給曲線進行進一步平滑,在插補過程中,反復檢查弦長誤差,并將其限制在規定的誤差范圍內。從正運動學仿真、逆運動學和NURBS 樣條曲線驗證了軟件有效性。這種混合策略確實需要稍微增加計算機系統內存,但是節省的時間和迭代次數的節省足以克服引入神經網絡的成本。并聯機器人運動學策略在不到兩次迭代和0.02s 的執行時間內,位置和方向參數的精度分別接近0.01mm 和0.01°。在實際抓取運動過程中,并聯機器人重復定位精度±0.05mm,運動速度快,拾放節拍120 次/min,驗證了算法的有效性和正確性。
