基于雙曲正切函數的改進型永磁同步電機無感矢量控制系統
2021-05-07 09:54:56張攀石照耀林家春于渤孫衍強丁宏鈺
哈爾濱工程大學學報 2021年5期
關鍵詞:卡爾曼濾波
張攀, 石照耀, 林家春, 于渤, 孫衍強, 丁宏鈺
(北京工業大學 精密測控技術與儀器工程技術研究中心,北京 100124)
永磁同步電機(permanent magnet synchronous motor, PMSM)具有結構簡單緊湊、損耗低、功率密度高、調速性能好、動態響應快等優點,廣泛應用于機器人、白色家電、數控機床、電動汽車、風機、泵機、激光追蹤系統等領域[1-5]。隨著永磁材料性能進步、電力電子元件性能的提升和PMSM控制技術的提高,PMSM應用領域也越來越廣。PMSM常用的控制策略有磁場定向控制(field oriented control, FOC)又叫矢量控制和直接轉矩控制(direct torque control, DTC)[6-7]。直接轉矩控制相比矢量控制簡化了控制結構和計算過程,緩解了運算控制器計算負擔,但直接轉矩較矢量控制產生更大的轉矩脈動,在很多應用領域仍以矢量控制為首選方案。矢量控制方法通常使用光電編碼器、磁編碼器、旋轉變壓器來獲取轉子的準確角度信息參與控制計算。但是在很多應用場合,安裝位置傳感器不僅增加成本、整體尺寸、重量,也使得容易受外界振動、環境干擾,降低系統可靠性。無位置傳感器控制方式可以降低PMSM對環境要求,簡化系統結構。
PMSM無位置傳感器控制方法大致分為零速、低速的高頻信號注入法和中速、高速的反電勢及磁鏈估計法[8-11]。國內外常用的無位置傳感器感控制方法主要包括神經網絡控制、模糊控制、擴展卡爾曼濾波器控制、龍伯格觀測器控制、滑模變結構控制等[12-15]。其中,滑模控制對系統精度要求不高,對參數變化和外部干擾不敏感,是一種魯棒性很強的控制方法,該方法在無位置傳感器控制系統中應用最為廣泛。在PMSM無位置傳感器矢量控制中,基于給定電流與反饋電流間的誤差構造滑模觀測器。滑模觀測器在觀測轉子位置和轉速時,利用開關信號不斷的變換系統結構,以很高的頻率正負切換,快速修正反電動勢的值,反電動勢中包含著位置信息,利用反電動勢解算出位置信息。由于滑模控制的固有特性,使用滑模觀測器法會帶來抖振問題,觀測到的轉子的位置信息容易受到轉速的影響,所使用的開關函數對觀測精度有較大影響[16]。
目前,改善滑模觀測器的高頻抖振是國內外學者研究的熱點。文獻[17]利用分段指數型函數代替傳統滑模觀測器中的開關函數,在飽和層內做線性變換,在飽和層外做開關函數變化,選取合適的邊界層厚度,一定程度上減弱了高頻抖動。文獻[18]采用Sigmoid函數代替開關函數估計反電動勢,減弱了轉速的高頻抖動。文獻[19]對滑模觀測器輸出的反電動勢進行兩級濾波,提高了反電動的平滑度,增強了系統抗負載擾動能力。
本文提出了一種基于雙曲正切函數代替開關函數的改進型滑模觀測器,改善了傳統滑模觀測器的抖振問題。經滑模觀測器輸出的反電動勢經過低通濾波之后仍存在較多的噪聲信號,使用卡爾曼濾波器對低通濾波后的反電動勢處理,再參與位置計算,提高觀測精度。卡爾曼濾波器是一種非線性的隨機觀測器,不需要存儲采集數據,可以實現邊采集邊計算,實現對采集數據的最優估計。同時使用鎖相環來提取轉子的位置信息、轉速,進一步提高觀測精度。通過構建李雅普諾夫(Lyapunov)方程對本文提出的改進型滑模觀測器進行了穩定性判定,得到了進入滑模面的充分條件。最后在Simulink平臺上對位置估算、轉速估算、反電動勢觀測、電流觀測、負載擾動及動態過程進行了仿真分析,通過對比分析驗證了本文提出的滑模算法的可行性與精準性。
1 永磁同步電機數學模型
1.1 靜止坐標系下PMSM數學模型
PMSM是一個強耦合、多變量、復雜的非線性系統,需要對其解耦分析,在α、β兩相靜止坐標系下數學模型為:
(1)
(2)
由式(2)可知擴展反電動勢中包含位置信息,從擴展反電動勢中可以提取轉子電角速度ωe和電角度θe:
(3)
1.2 旋轉坐標系下數學模型
在d-q旋轉坐標下的數學模型為:
(4)
式中:ud、uq為d-q坐標系下的定子電壓;id、iq為d-q坐標系下的定子電流;Ed、Eq為d-q坐標系下的感應電動勢,且Ed=0,Eq=ωeψf,Eq包含著轉速信息,通過對轉速積分可得到轉子的位置信息:
(5)
PMSM機械轉矩方程式和電磁轉矩方程為:
(6)
(7)
式中:J為轉子轉動慣量;Te為電磁轉矩;TL為負載;B阻尼系數;pn電機極對數;ψf為定子磁鏈;ω為機械角速度。
2 改進型滑模觀測器
2.1 旋轉坐標系下滑模觀測器構造

根據式(4)滑模觀測器可構造為:
(8)
式(8)減去式(4),得電流誤差方程為:
(9)

(10)
(11)
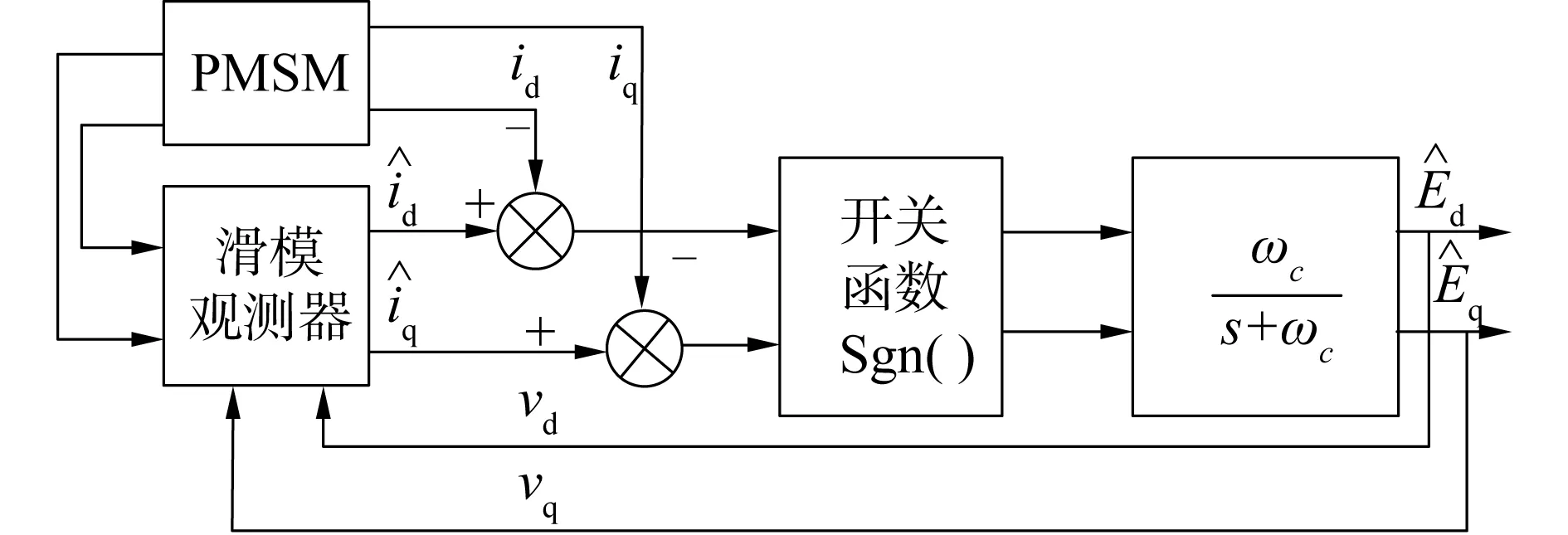
圖1 傳統滑模觀測器結構Fig.1 Structure block diagram of traditional sliding mode observer
2.2 雙曲正切函數滑模觀測器構造
傳統滑模觀測器中使用的是不連續的開關函數,某些改進型的控制策略將開關函數改為飽和函數,在一定程度上改善了開關函數突變造成的抖振問題,但是仍有較大抖振。為最大程度減弱開關函數帶來的抖振問題,本文采用雙曲正切函數代替開關函數。開關函數、飽和函數、雙曲正切函數曲線如圖2所示。
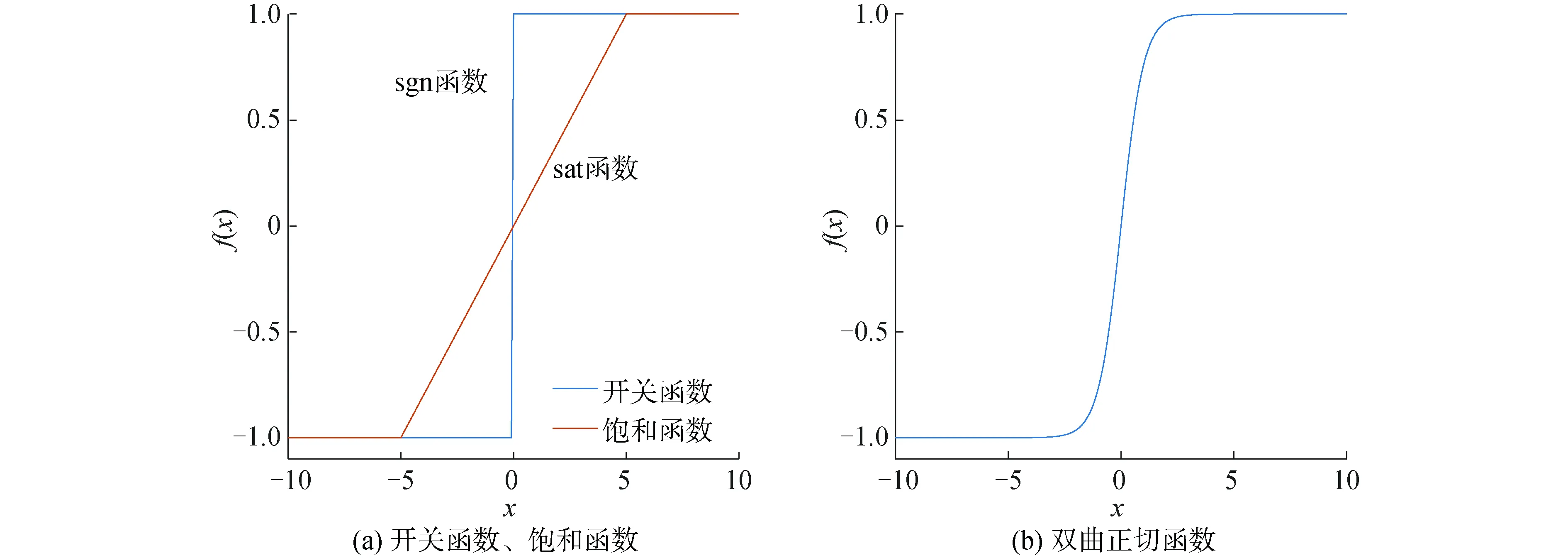
圖2 開關函數、飽和函數、雙曲正切函數曲線Fig.2 Curves of sgn(·) function, sat(·) function, tanh(·) function
根據實際控制要求將雙曲正切函數修改為:
(12)
式中:α為權重因子,α越小邊界層厚度越大,系統收斂越慢,且系統的魯棒性越差,當α無窮大時,f(x)轉換為開關函數,造成較大的抖振,本文選取α值為2.2,滿足系統的精度和魯棒性要求。使用雙曲正切函數代替滑模函數則,式(8)改寫為:
(13)
雙曲正切函數變化平緩,不存在突變,一定程度上削弱了滑動模態運行過程中的高頻抖動。
2.3 李雅普諾夫穩定性分析
不同改進型的滑模觀測器,最終都要使估計值收斂到滑模面。當電流誤差為負值時,電流誤差的微分值要為正,修正電流減小的趨勢;當電流誤差為正時,電流誤差的微分值要為負,修正電流增加的趨勢。使用李雅普諾夫(Lyapunov)函數判斷雙曲正切函數滑模觀測器的穩定性。Lyapunov穩定性方程為:
V=sTs/2
(14)

(15)

(16)
對于表貼式PMSM有Ld=Lq=Ls,對于內嵌式PMSM為化簡方便,可認為Ld=Lq=Ls=(Ld+Lq)/2,將式(16)代入式(15)得:
歐洲腦白質疏松和殘疾研究(LADIS)是一項納入396名受試者的大樣本的前瞻性的隨機對照研究,研究發現受試者的糖尿病病史、空腹血糖水平,以及既往腦卒中病史與腦白質損害的進展有著顯著的相關[15]。
(17)
(18)
2.4 感應電動勢卡爾曼濾波
低通濾波器設置的截止頻率過大,則感應電動勢中含有的干擾信號較多,濾波效果不明顯;若截止頻率選得過小,會導致估算感應電動勢中存在較大的相位誤差。低通濾波處理后感應電動勢中仍然存在著估算誤差和諧波分量,可進行二級濾波處理,減小諧波分量,卡爾曼濾波器不僅可以濾除感應電動勢中的高頻分量,還能夠對系統噪聲和測量噪聲進行過濾處理,提高觀測精度[20]。卡爾曼濾波是一個不斷預測、修正的過程,能夠實現實時采集預測,不需要存儲歷史測量數據,非常適合在MCU運算處理器中實時濾波處理。
由于系統采樣周期極短可以認為k時刻和k-1時刻感應電動的值沒有變化,則無控制量的離散卡爾曼濾波狀態預測方程為:
(19)

(20)

(21)
式中:Kk表示k時刻的卡爾曼增益;H為測量模型的參數矩陣,一維時可設置為1;R為噪聲的協方差。
根據k時刻的感應電動勢估計值和k時刻低通濾波輸出的值,可以得到k時刻感應電動勢最優估計值,也就是k時刻濾波后的值。
(22)

(23)
2.5 鎖相環估算轉子位置
電機實際運行過程中磁鏈ψf并不是一個常量,受負載、溫度變化的影響,經除法運算求得轉速不準確,造成角度估算存在較大誤差。為改善這種除法運算引入的誤差,采用鎖相環(phase-locked loop,PLL)的方式來獲取轉子的位置觀測值。將三相電壓變換到d-q坐標系有:
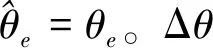
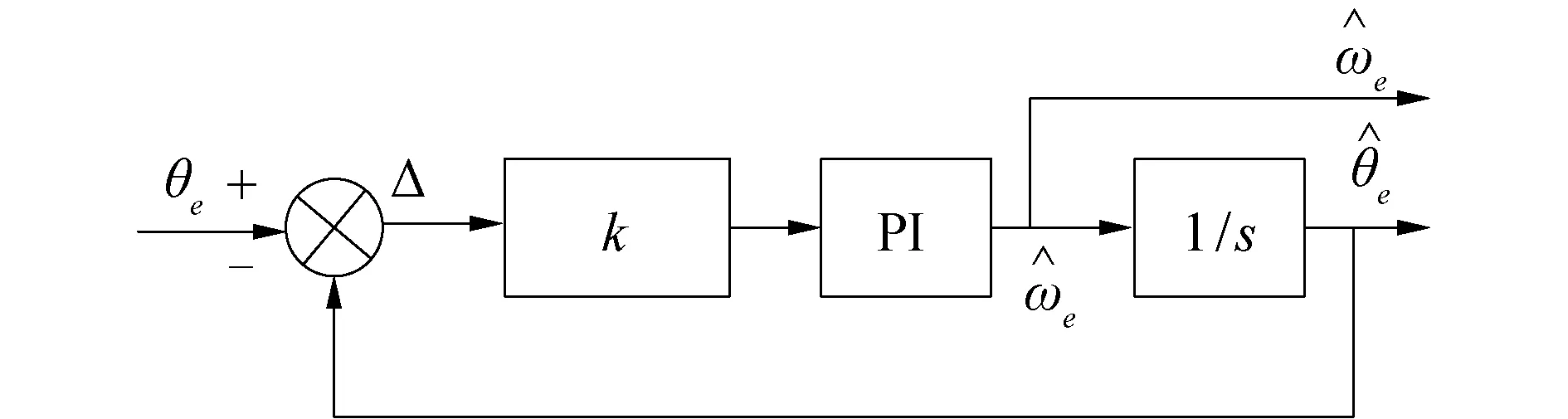
圖3 鎖相環轉子位置估算Fig.3 Estimation of PLL rotor position
根據圖3計算等效鎖相環的系統傳遞函數為:
(24)
式中:k為增益系數;kp、ki為PI環的比例、積分系數。
從式(24)可以看出G(s)具有低通濾波的作用,可以減弱估算電角度中的高頻諧波,與式(5)相比,雖然鎖相環系統動態性能弱一些,但鎖相環法提取的角度信息和轉速信息誤差更小,具有更高的觀測精度和更強的魯棒性。基于雙曲正切函數的改進型滑模觀測器結構如圖4所示。
圖4 雙曲正切函數的改進型滑模觀測器Fig.4 Improved sliding mode observer based on tanh(·) function
3 仿真實驗結果與分析
3.1 速度變化結果分析
為驗證改進型滑模觀測器的可行性,本文基于Simulink仿真平臺進行仿真驗證。系統仿真時間為1.8 s,采用id=0控制策略,永磁同步電機的關鍵參數設置如表1所示。
設置目標轉速為800 r/min,在0.5 s時突然施加1 N·m負載,0.8 s時卸載,1.1 s時施加3 N·m負載,1.4 s時卸載,反復加載卸載,根據仿真結果,觀測系統仿真特性。滑模觀測系統均使用鎖相環控制估算轉子的位置信息。3種控制策略的電流環、速度環、鎖相環中的PI控制參數完全相同。基于開關函數、飽和函數、雙曲正切函數滑模觀測器控制系統仿真結果的速度變化曲線如圖5~7所示。
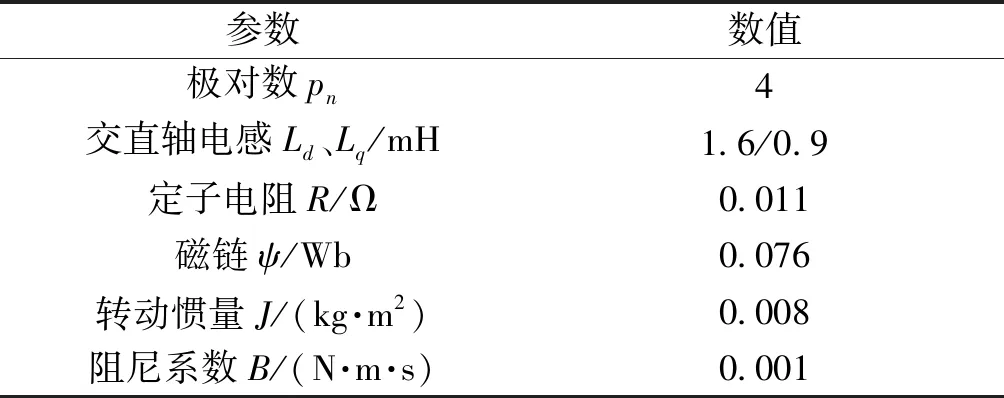
表1 永磁同步電機參數Table 1 Parameters of PMSM
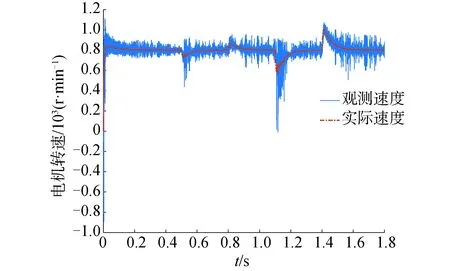
圖5 基于開關函數的滑模觀測器速度變化曲線Fig.5 Speed curves of sliding mode observer based on sgn(·) function
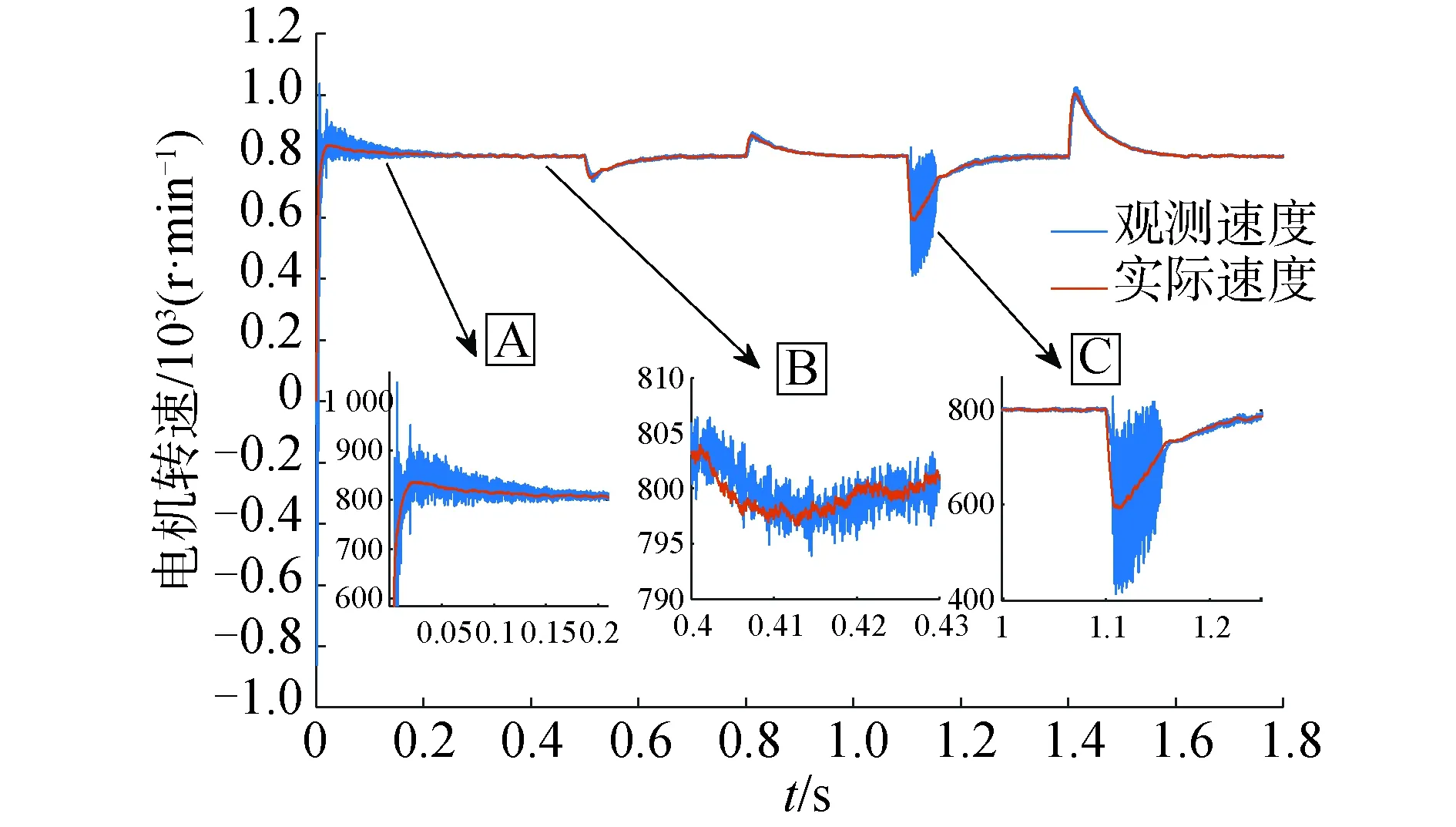
圖6 基于飽和函數的滑模觀測器速度變化曲線Fig.6 Speed curves of sliding mode observer based on sat(·) function
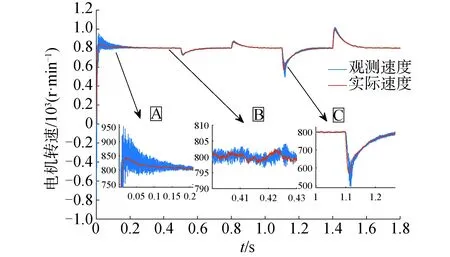
圖7 基于雙曲正切函數的滑模觀測器速度變化曲線Fig.7 Speed curves of sliding mode observer based on tanh(·) function
由圖5~圖7中可以看出,穩態時飽和函數和雙曲正切函數的速度平穩性要明顯優于開關函數。在受到外界負載沖擊時飽和函數和雙曲正切函數的抗干擾能力明顯優于開關函數。在0.5 s突然施加1 N·m負載,在0.8 s時卸載,飽和函數和雙曲正切函數的速度曲線變化沒有明顯區別。對比圖6、圖7中的A部分放大圖,在啟動瞬間飽和函數觀測速度振蕩幅度超過了1 000 r/min,明顯大于雙曲正切函數觀測速度振蕩幅度950 r/min。之后的啟動過程中,二者都存在明顯的振蕩。但雙曲正切函數仍存在明顯的大幅振蕩幅值和較長的收斂時間,在啟動階段的穩定性并沒有得到較大改善。對比圖6、圖7中的B部分放大圖,穩態時雙曲正切函數的速度波動在5 r/min內,小于飽和函數的速度波動,削弱了無感穩態速度抖動。
在1.1 s突然施加3 N·m負載,在1.4 s時卸載該負載,可以看到在突然施加負載時雙曲正切函數的抗干擾能力要明顯優于飽和函數。對比圖6、圖7中的C部分放大圖,飽和函數的最低速度接近400 r/min,而雙曲正切函數的最低速度接近500 r/min,并且飽和函數的速度變化存在較大的振蕩,速變化不平穩,而雙曲正切函數的速度變化曲線比較平滑,在PI的調節作用下逐漸達到目標速度。受到較大沖擊時,雙曲正切函數較飽和函數具有更強的抗干擾能力。在1.4 s時卸載二者的速度變化基本相同。
3.2 電動勢變化結果分析
圖8~圖10顯示的是反電動勢eα、eβ變化曲線。由圖8~圖10中可以看出基于飽和函數的反電動勢和基于雙曲正切函數的反電動勢明顯優于基于開關函數的反電動勢。轉速變化直接反應了反電動勢的變化,開關函數的速度變化較劇烈,其反電動勢變化也不穩定。
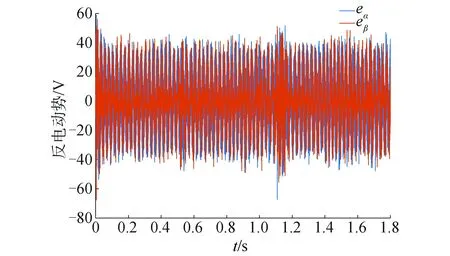
圖8 基于開關函數的滑模觀測器反電動勢變化曲線Fig.8 Back EMF curve of sliding mode observer based on sgn(·) function
啟動瞬間基于飽和函數的振蕩幅值要明顯大于基于雙曲正切函數幅值。在0.5 s突然施加1 N·m負載,在0.8 s時卸載,二者的反電動勢都沒有明顯的區別,但是在0.8 s時突然施加3 N·m負載基于飽和函數的反電動勢曲線出現了明顯紊亂,振蕩的幅值和收斂時間都要大于雙曲正切函數。基于雙曲正切函數的反電動勢出現短時振蕩后便逐漸收斂,在1.4 s時卸載,二者的反電動勢出現了輕微的波動,但區別不是很明顯。由式(2)表明了反電動勢與轉速之間的關系,根據轉速仿真結果、反電動仿真結果以及上述的分析,可知仿真結果的合理性。
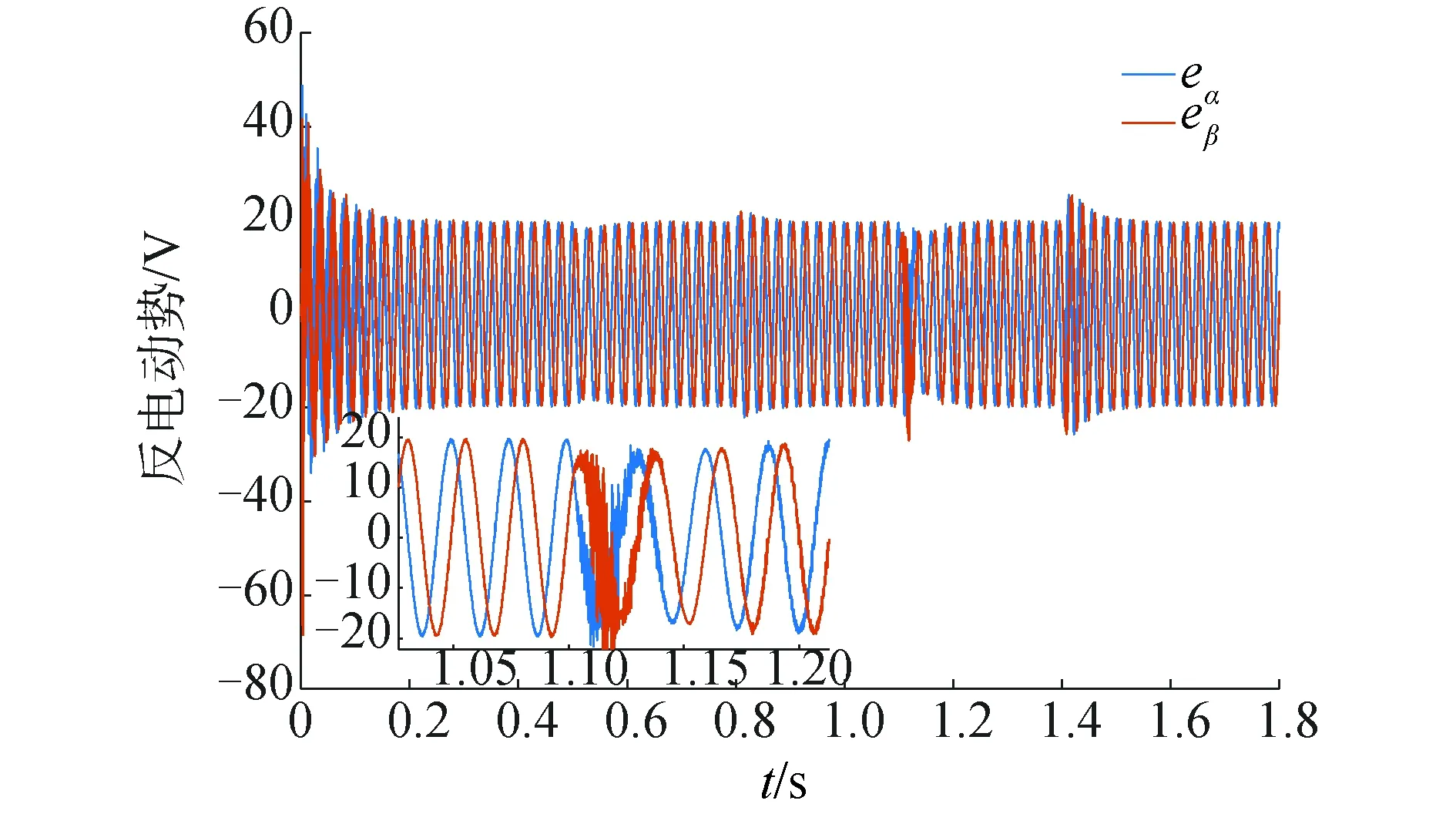
圖9 基于飽和函數的滑模觀測器反電動勢變化曲線Fig.9 Back EMF curve of sliding mode observer based on sat(·) function
圖10 基于雙曲正切函數的反電動勢變化曲線Fig.10 Back EMF curve based on tanh(·) function
3.3 電流變化結果分析
圖11~圖13顯示是三相電流變化曲線。
圖11 基于開關函數的電流曲線Fig.11 Current curve based on sgn(·) function
由圖11~圖13可知,開關函數的電流變化曲線含有較多的高頻諧波,電流波動較大。在施加負載時開關函數電流振蕩幅度較大,電流畸變明顯,收斂速度慢。對比圖12和圖13中的局部放大圖A,在0.5 s時施加1 N·m負載,基于飽和函數和基于雙曲正切函數的三相電流變化曲線差別不是很明顯。在1.1 s時突加3 N·m負載,對比局部放大圖B,雙曲正切函數電流相比飽和函數電流畸變小,且能在更短的時間內迅速調節到規律的正弦變化曲線,證明基于雙曲正切函數的抗干擾能力較強。對比局部放大圖C,施加負載進入穩定階段后二者的電流變化曲線沒有明顯區別。
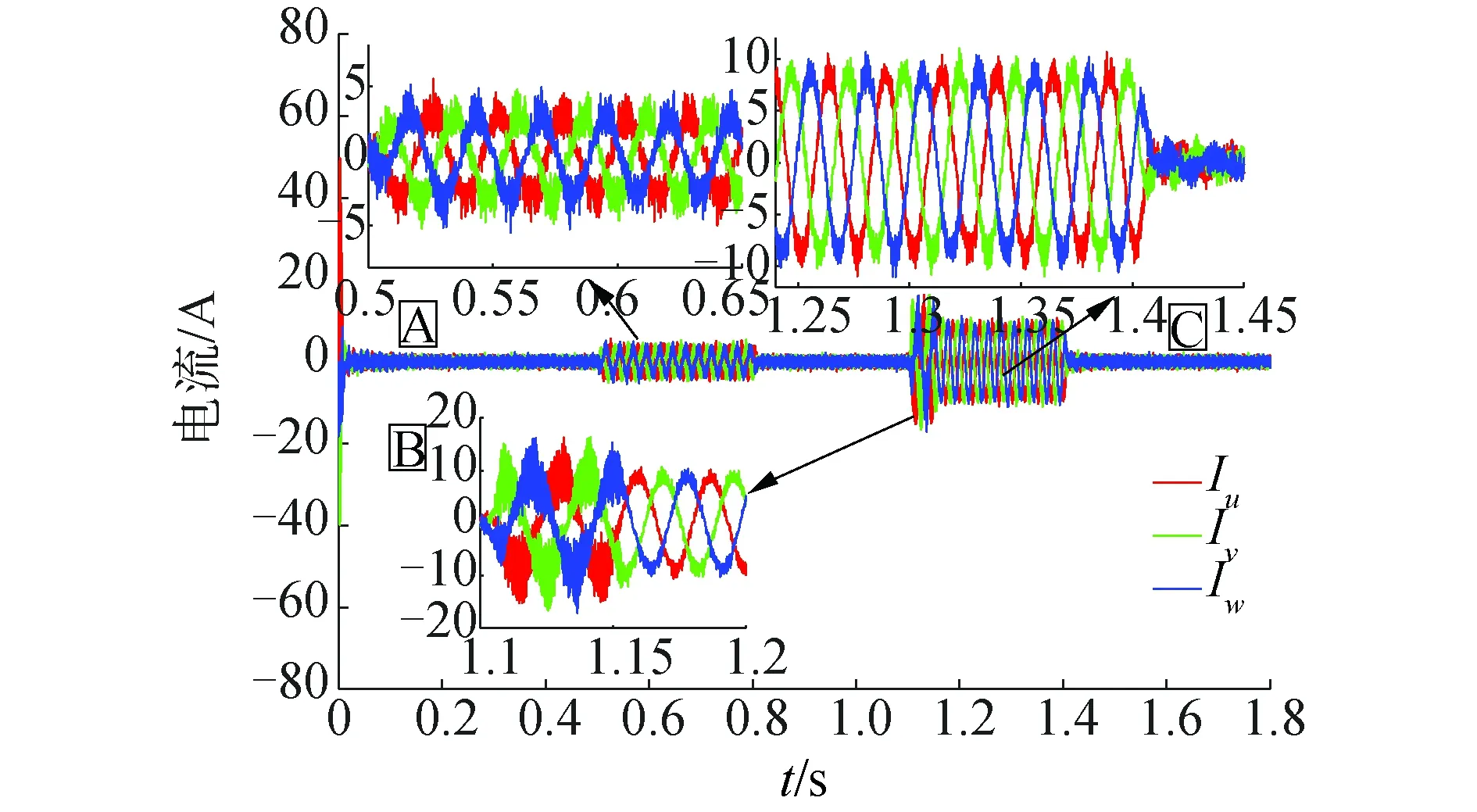
圖12 基于飽和函數的電流曲線Fig.12 Current curve based on sat(·) function
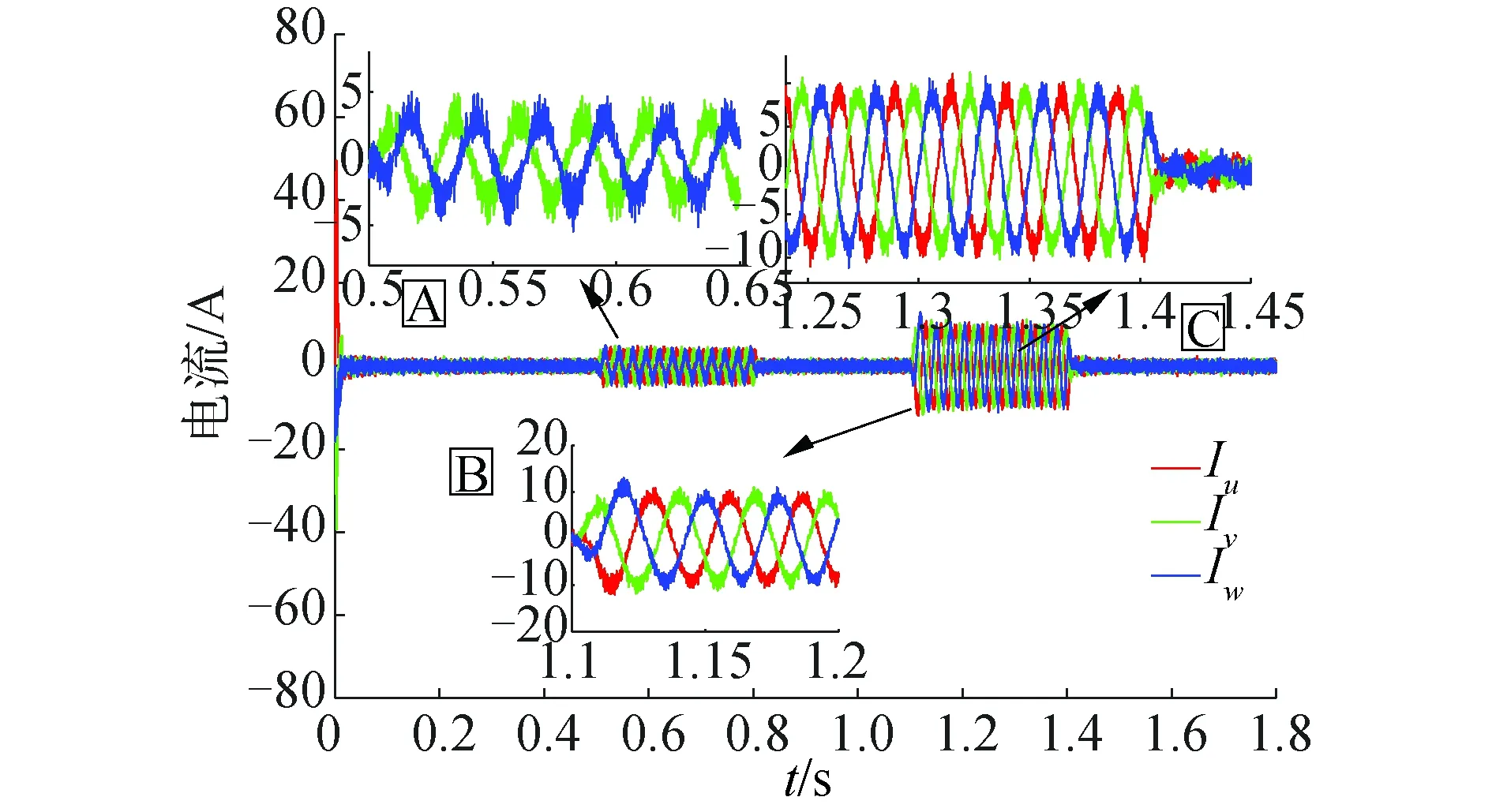
圖13 基于雙曲正切函數的電流曲線Fig.13 Current curve based on tanh(·) function
3.4 轉速誤差變化曲線分析
圖14~圖15顯示的是飽和函數和雙曲正切函數轉速誤差變化曲線。由圖5可以看出基于開關函數的觀測速度在空載和負載情況下跟實際速度有較大的誤差,不做詳細對比。
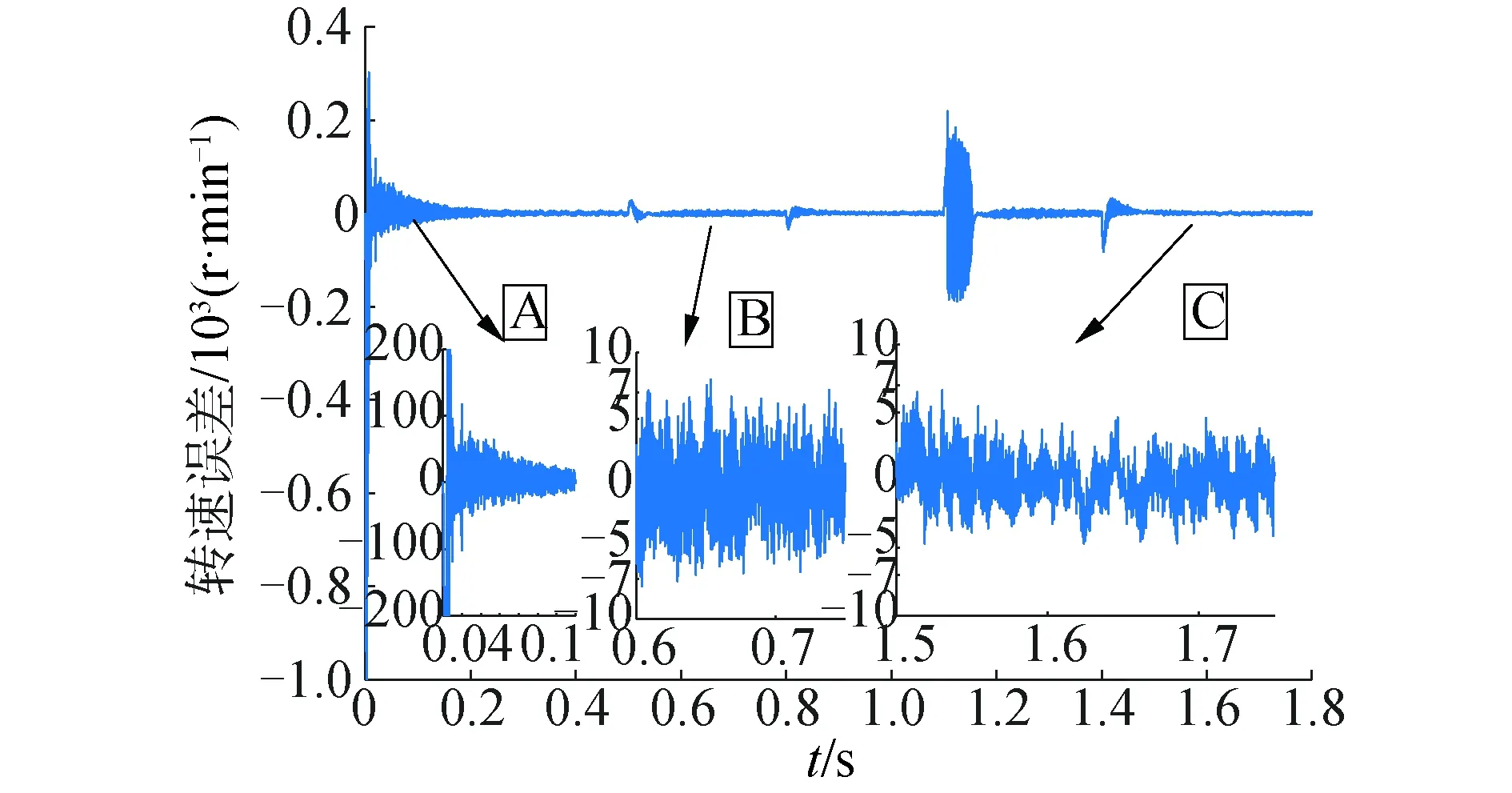
圖14 基于飽和函數的轉速誤差曲線Fig.14 Speed error curve based on sat function
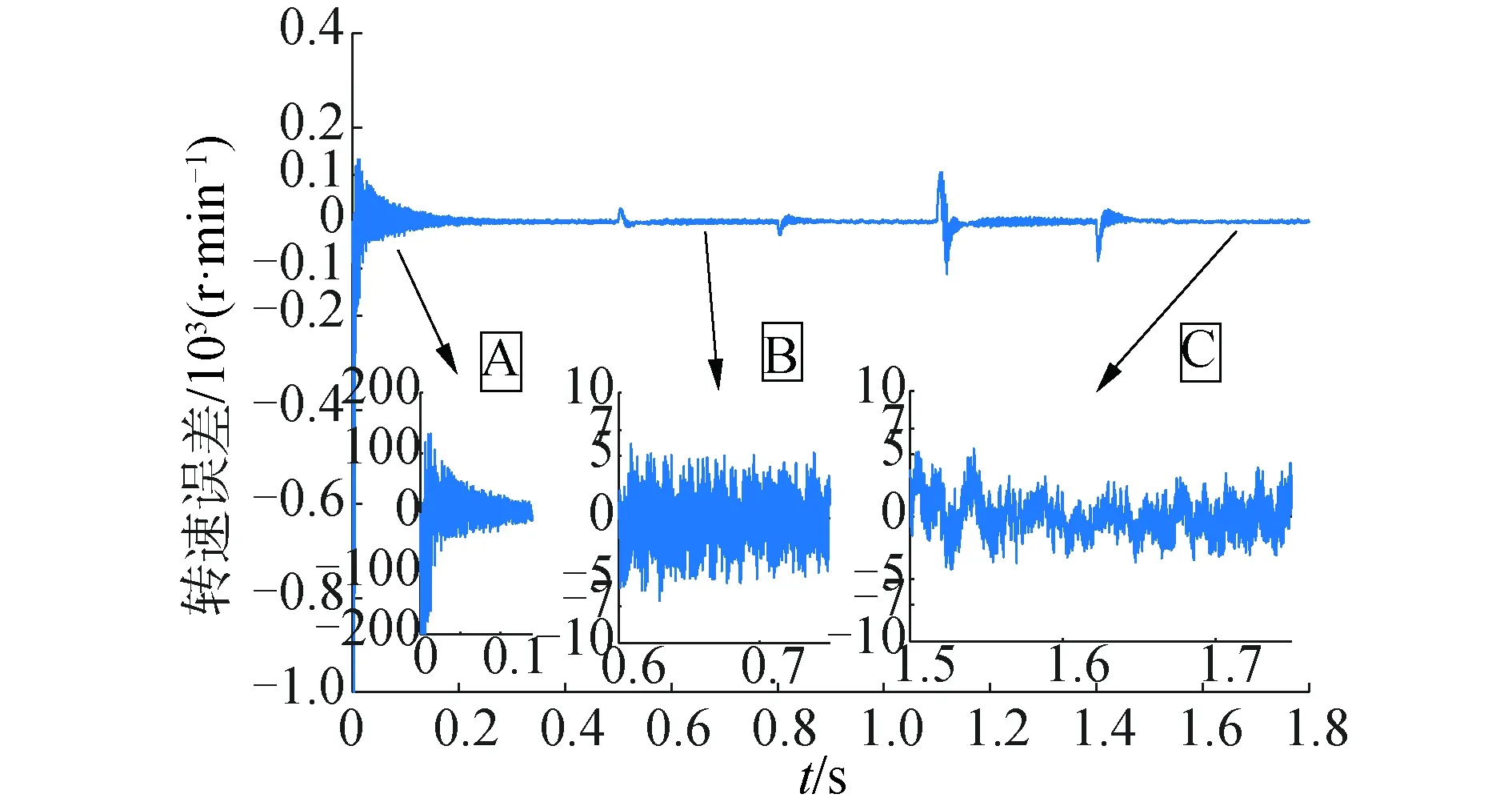
圖15 基于雙曲正切函數的轉速誤差曲線Fig.15 Speed error curve based on hyperbolic tangent function
由圖14~圖15啟動階段的A部分局部放大圖可知,雙曲正切函數的振蕩的最大幅值小于飽和函數的最大幅值,但仍存在較大的振蕩。兩處穩態運行階段的局部放大圖B、C,基于雙曲正切函數的估算轉速與實際轉速在-7~6 r/min范圍內變化,基于飽和函數的估算轉速與實際轉速在-8~8 r/min范圍內變化,穩態運行時雙曲正切函數較飽和函數對抖振現象有所緩解。在0.5 s施加1 N·m負載,在0.8 s卸載,二者的轉速誤差曲線差別不太明顯,但在1.1 s時施加3 N·m負載,在1.4 s卸載,雙曲正切函數的振幅明顯小于飽和函數的振幅,并且在較短的時間內收斂到目標值附近,具有較強的抗干擾能力。
3.5 帶卡爾曼濾波的速度變化分析
通過上述仿真可以證明雙曲正切函數具有較強的削弱穩態抖振能力和較強的抗干擾能力。為進一步改善雙曲正切函數啟動過程振蕩幅度大和穩態運行的抖振問題,在反電動勢末端加入卡爾曼濾波,由于電流變化和反電動勢變化都能在速度曲線上體現出來,這里只分析速度和速度誤差變化曲線,圖16~圖17是在雙曲正切函數基礎上加入卡爾曼濾波的速度變化曲線和速度誤差變化曲線。
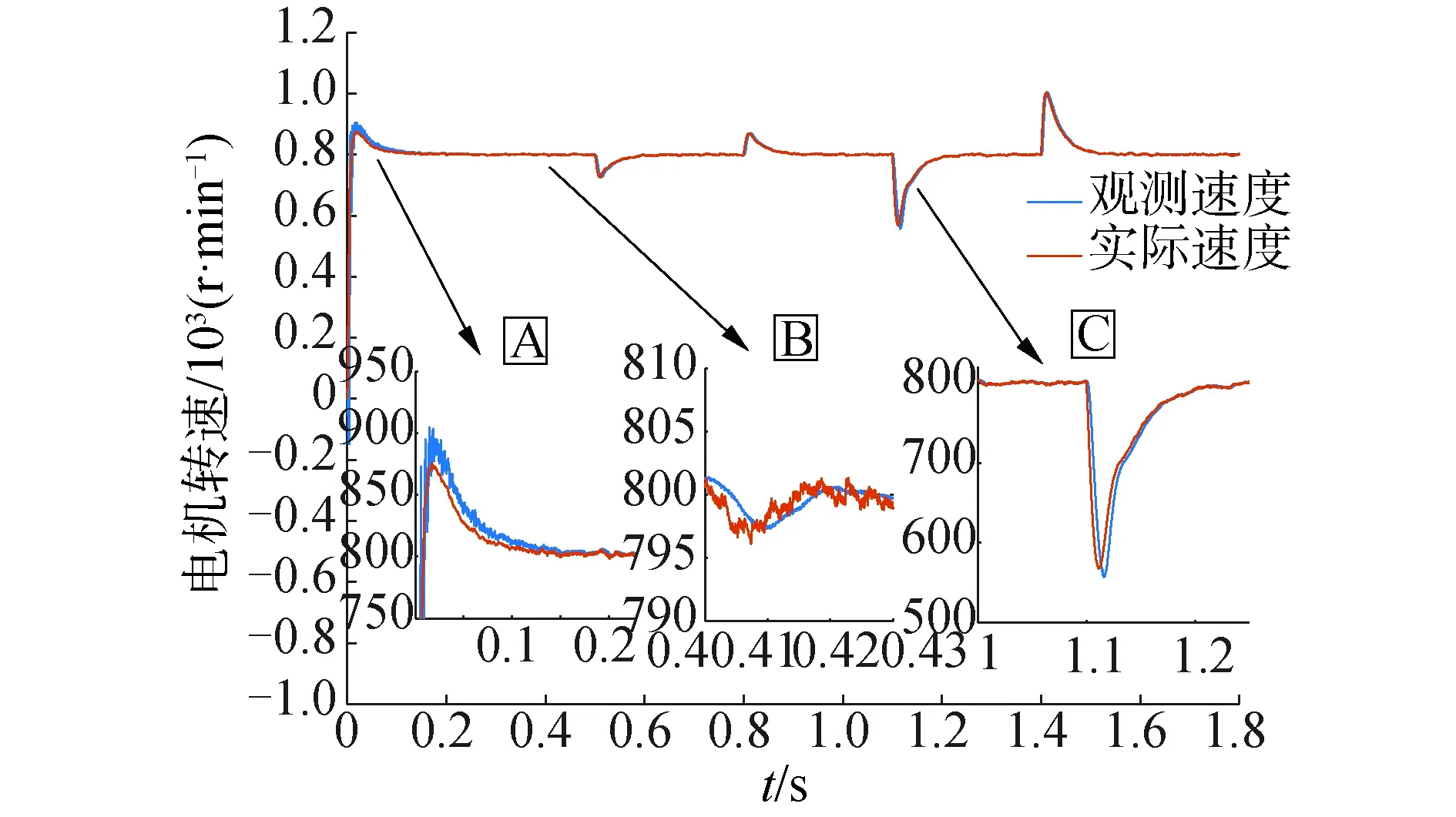
圖16 帶卡爾曼濾波器的速度變化曲線Fig.16 Speed curve of Kalman filter
對比速度變化曲線圖7和圖16的局部放大圖A,經過卡爾曼濾波后啟動過程的振蕩頻率與振蕩幅值得到明顯改善,從之前的950 r/min降低到900 r/min,收斂時間也明顯減小從之前的0.2 s縮短至0.1 s。對比局部放大圖B 可知在穩態運行時,加入濾波后的穩態運行誤差值更小。局部放大圖C是施加3 N·m負載的速度波動曲線,估算速度的振蕩頻率與最大振蕩幅值明顯減小,圖16經卡爾曼濾波后的最小速度約為580 r/min,明顯大于圖7無卡爾曼濾波的最小速度500 r/min。圖16中在1.2 s時達到目標速度,圖7中在1.25 s時達到目標速度,收斂時間減小。
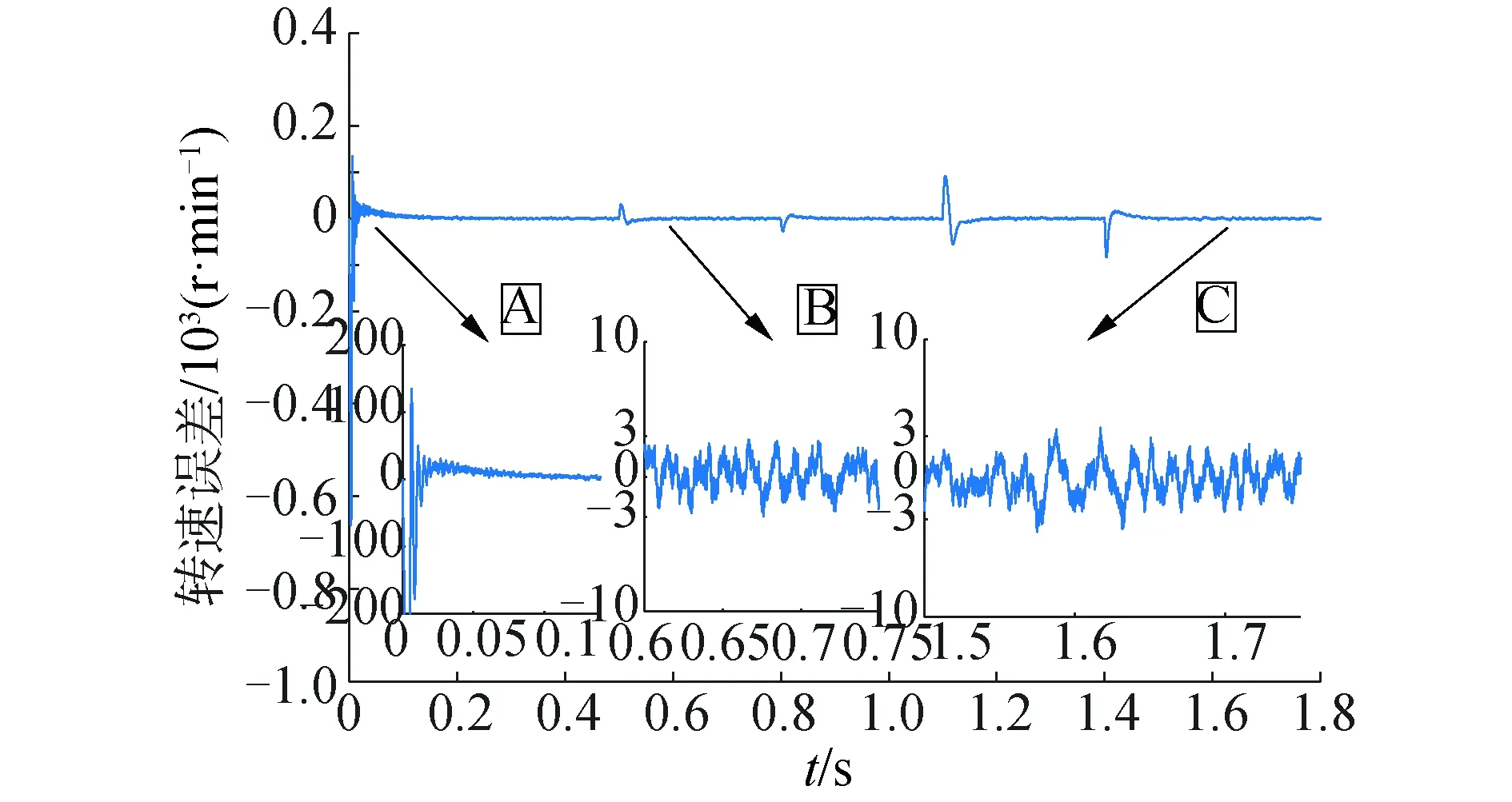
圖17 帶卡爾曼濾波器的速度誤差變化曲線Fig.17 Speed error curve of Kalman filter
加入卡爾曼濾波器后系統抗干擾能力明顯增強。對比圖15和圖17,加入卡爾曼濾波后啟動過程速度誤差波動曲線在0.05 s時基本達到穩定,啟動過程的振蕩得到明顯改善,從B部分和C部分是穩態運行過程的局部放大圖,振蕩幅值得到明顯改善,由之前的-7~7 r/min縮小到-3~3 r/min。
通過對圖7和16,圖15和17的對比分析可以證明加入卡爾曼濾波后明顯改善了啟動階段的振蕩幅值與收斂時間,并且進一步削弱了穩態運行過程中的高頻抖振問題。
4 結論
1)采用改進型滑模控制算法在穩定運行過中的速度誤差明顯減小,縮小到-3~3 r/min,改善了穩態的抖振問題。
2)當外界突加負載時,改進型滑模控制方法適應能力最佳,具有最強的抗干擾能力,能夠更好的保持三相電流穩定。
3)對反電動勢進行卡爾曼濾波后,啟動過程的速度振蕩幅度與收斂時間明顯減小,啟動過程更為平滑。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36