基于雙軸超聲列陣駐波原理的固體顆粒懸浮操控實驗
2021-05-12 00:48:34朱琳琳嚴雅琳黎廷豐唐小煜蔡偉博
物理實驗 2021年4期
關鍵詞:實驗
朱琳琳,嚴雅琳,黎廷豐,唐小煜,蔡偉博,黎 銘
(華南師范大學a.物理與電信工程學院; b. 物理國家級實驗教學示范中心,廣東 廣州 510006)
超聲駐波懸浮技術是利用超聲振動產生的輻射聲壓使懸浮體在沒有任何附加效應的聲場中懸浮或移動[1],因其具有非接觸,材料獨立,不需要對小球預處理,可以懸浮固體、液體和氣體等優點被廣泛應用在物理、化學、生物、材料科學等領域. 目前,一維單軸式軸對稱聲懸浮器是目前應用最多的一種聲懸浮裝置[2]. 郭木鐸[3]等建立單軸式聲懸浮實驗裝置,實現對多層泡沫球的穩定懸浮,同時肯定凹球面反射面對于提高聲懸浮器的懸浮能力的作用;范皓然[4]等基于超聲相控陣構建復雜聲場,通過調節發射反射面的幾何參量,利用單軸式超聲懸浮系統實現了樣品的懸浮;朱怡[5]等基于單軸式聲懸浮儀結構,通過調節超聲波的頻率和電壓實現目標的靜止到懸浮. 這類裝置雖然能夠實現懸浮物的懸浮,但產生的駐波聲場比較弱,因而懸浮能力較小,其次不能使得懸浮物在諧振腔內移動,限制其使用與應用推廣. 本文結合雙軸超聲列陣駐波機理,創新設計了平面-凹球面組合超聲列陣懸浮模型,自主搭建了懸浮裝置,實現了單粒子的束縛及定位移動,并測試了裝置的穩定性.
1 聲懸浮原理
1.1 超聲波駐波
駐波是由頻率和振動方向相同而傳播方向相反的2列波疊加而成[6],根據所發射超聲波的波長,設超聲波雙發射端之間的距離為聲波半波長的整數倍. 發射器兩端所發射超聲波波動方程分別為[5]
p1=p0cos (ωt-kz),
(1)
p2=p0cos (ωt+kz),
(2)
其中p0=ρ0c0u為無聲擾時介質的壓強. 所以疊加后的駐波聲場聲壓分布為
p=pi+pr=2p0cos (kz)cos (ωt),
(3)
設z軸與兩發射端聲波的傳播方向平行. 如圖1所示,聲壓在z軸方向呈現周期性變化,波節之間距離為半波長的整數倍.

圖1 駐波場中z軸傳播的聲壓變化圖
1.2 超聲波換能器列陣
在實際的超聲波懸浮實驗中,若上下兩端都是單個換能器的組合,源于儀器的功率問題,其所能提供的聲輻射力不足,使得儀器很難浮起輕小物體,或者導致懸浮穩定性不佳. 為了得到更大的聲場能量,將超聲波換能器以某種特定的規律排列起來,形成超聲波換能器列陣加強聲場能量. 根據波的疊加原理,在某一方向上傳播相同頻率的多列超聲波,會在空間中干涉,共同構建出能量更大的超聲波聲場[7]. 當僅有1對換能器發射超聲波時,其聲壓在-1.5~1.5 Pa之間;而當有5對換能器發射超聲波時,其空間聲壓可達-2.5~2.5 Pa.
若超聲波列陣探頭中每個晶片都獨立,都有自己的接口、延時電路和A/D轉換器,并且晶片之間彼此絕緣,那么此時超聲波換能器列陣可作為超聲波相控陣. 目前的超聲波換能器列陣主要分為平面列陣和凹面列陣,二者都有聚焦干涉的作用,但因為凹面列陣具有自聚焦性,其聚焦性能要優于平面列陣. 為了簡化裝置,本實驗將列陣中所有換能器并聯起來以便統一操控.
1.3 聲懸浮原理
根據Gor’Kov的聲懸浮理論,從動量交換的角度分析,該理論認為聲場中聲輻射力的大小等于介質質點在懸浮小球表面這一封閉面上的動量變化率,所以在超聲波駐波懸浮中引入聲輻射力的時間平均勢的概念[8],Gor’Kov的理論指出,在懸浮小球半徑遠小于懸浮聲場內的聲波波長時,懸浮小球所受聲輻射力的時間平均勢的表達式為[2]
(4)

(5)
(6)
根據(6)式即可通過懸浮空間中的聲場分布測量相應的質點振速,在已知流體介質靜密度ρ0及聲波在靜止介質中的傳播速度c0的前提下,可通過(4)式和(6)式計算出不同半徑的懸浮小球在空間聲場中所受聲輻射力的時間平均勢U. 當然為表述方便,一般用相對時間平均勢:
(7)
代替時間平均勢. 根據勢能與力的關系,易得:
F=-U.
(8)
根據(8)式,可計算出半徑為R的小球在c0和ρ0一定時,在聲場中所受z方向上的聲輻射力為
(9)
由于此聲輻射力的方向沿著z軸方向,故在重力場作用下,聲輻射力在某些位置可以抵消重力,創建局部的懸浮區域,使得半徑為的懸浮粒子可以懸浮在該區域內,且這一區域為超聲波駐波場波節附近區域[3,9].
1.4 移動原理
超聲波駐波場中波節的位置與超聲波的相位有關,而波節位置又是懸浮區域的位置,所以可以通過控制超聲波相位的方法,使得懸浮粒子隨波節移動而移動. 如圖2所示,運用數字電路設計出與超聲波頻率相同方波信號,占空比為50%,以此作為超聲波列陣的相控信號.
為解決串行切換帶來相位誤差,實驗采用了FPGA芯片,通過并行輸出解決此問題. 在相控方面采取如圖2所示的切換控制信號的方式. 通過FPGA開發板的時鐘將內部信號分頻為頻率40 kHz,分別對上下2個換能器列陣輸入2路相位相反的PWM信號,差分形成方波信號,通過軟件編程命令方波信號按照指定規律移動. 然后控制信號經過H橋驅動電路放大接入超聲換能器中,使之正常工作. 通過觸發FPGA板上的命令按鈕,控制相位變化,使換能器發出相位變化的信號,從而使懸浮目標移動[8].

圖2 控制信號相位變化圖
2 實驗裝置
自主搭建了雙軸超聲列陣駐波原理的固體顆粒懸浮操控實驗平臺,圖3(a)為利用COMSOL Multiphysics軟件建模而成的3D裝置圖,圖3(b)為裝置的實物圖. 實驗平臺主要由底座、超聲發生電源、控制模塊、懸浮裝置部分等構成. 其中底座由木塊和金屬板組成,底座的鏤空設計便于放置移動電池;超聲發生電源可用7.2 V的移動電源或者實驗室可調穩壓電源,根據實驗條件選擇合適的供電設備,通過導線與控制模塊相連;控制模塊集成設計成3層板,通過在FPGA產生PWM信號,差分后形成方波控制信號,再通過驅動電路放大后,驅動懸浮部分的超聲波換能器;懸浮部分由上下左右各36個超聲換能器振子分別固定在凹球面-平面上,并用導線相互連接形成回路,通過控制模塊驅動,產生40 kHz超聲波,使上下左右的超聲陣列振動,從而形成駐波聲場,實現顆粒的懸浮與操控.

(a)裝置3D建模圖
在本文的所有實驗中,皆是采用直徑約為1.5 mm,密度為0.91 g/cm3的聚苯乙烯泡沫塑料小球作為懸浮目標,采用的超聲換能器振子型號是響應頻率為(40.0±1.0) kHz,輸入峰值電壓為40 V的NU40C10T-2開放型. 利用外部電源供電,通過按鍵控制FPGA模塊產生控制信號,經過驅動電路作用于平面-凹球面換能器列陣. 裝置系統框圖如圖4所示.

圖4 裝置系統框圖
3 實驗過程與數據分析
3.1 實驗仿真
在正式實驗開始之前,采用COMSOL Multiphysics模擬軟件進行仿真預實驗,模擬凹球面列陣與平面列陣組合的雙軸懸浮聲場分布,如圖5所示. 從理論上證實列陣組合的可行性. 設置凹球面部分和雙邊平面部分發射40 000 Hz的球面波,其他部分的邊界區域則設置為開放邊界條件,由仿真結果得,仿真圖中心區域的淡橙色部分為聲壓節點位置,即粒子懸浮區域. 對比平面-平面組合,凹球面和平面列陣組成的雙軸懸浮裝置所產生的聲場也出現“網格”狀的聲場分布,對比單軸凹球面的懸浮裝置,此組合模型聚焦性性能更強,旁瓣較少,容易實現粒子的懸浮和定位操控. 對比雙軸凹球面-凹球面的懸浮裝置,雖然聲場的聚焦性更強,但是過強的聚焦性難以實現對粒子的定位移動操控. 因此凹球面-平面列陣組合的雙軸懸浮模型是可行的.

圖5 模擬駐波場聲壓分布圖
3.2 單粒子的懸浮
利用設計的實驗裝置實現懸浮目標的穩定懸浮. 將懸浮粒子送入裝置內進行懸浮,待穩定懸浮,記錄懸浮目標的位置,重復多次實驗,同時對實驗全程進行錄制,實驗后將視頻導入Tracker軟件,分析得到懸浮目標的懸浮位置(圖6). 為了探究懸浮目標懸浮的準確程度,將實際懸浮實驗中懸浮目標的懸浮高度與仿真實驗中聲壓節點高度(圖7)進行對比,計算其相對偏差,得到數據如表1所示.

圖6 使用Tracker軟件對懸浮粒子進行定位
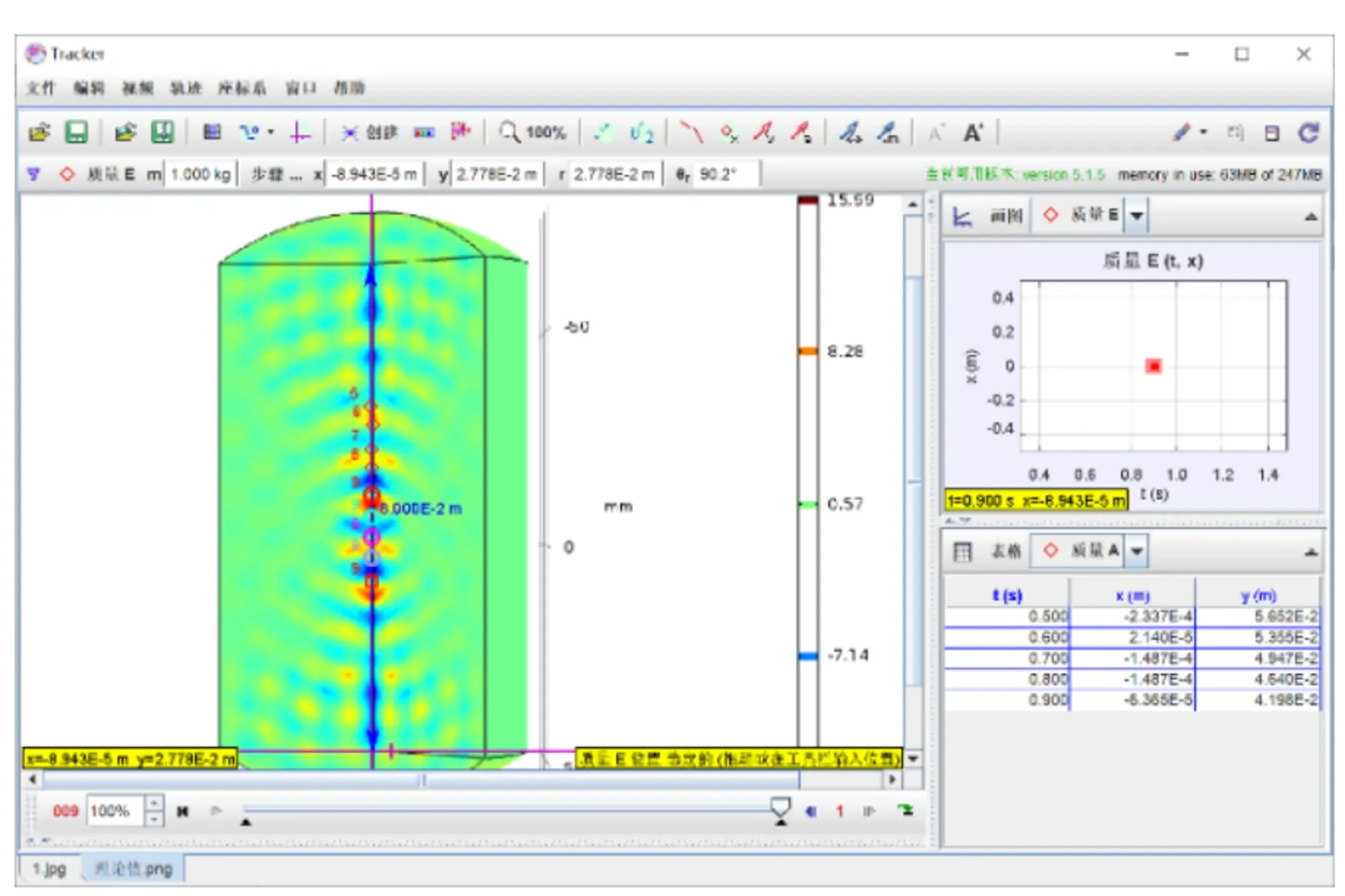
圖7 使用Tracker軟件對仿真模型中聲壓節點進行定位
從表1可以看出,實際懸浮實驗中懸浮目標的懸浮位置與仿真實驗吻合度較高,相對偏差較小,多次實驗平均相對偏差為Er=1.67%. 因此實驗裝置的實際懸浮高度與理論的懸浮高度匹配度較高.
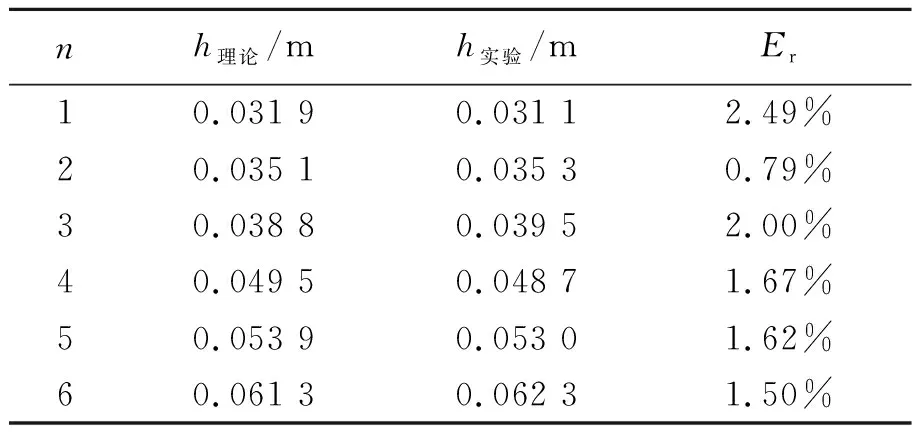
表1 仿真得到的聲壓節點位置與實際懸浮位置對比
3.3 單粒子的操控
超聲列陣結構具有較強的懸浮能力和移動能力,尤其是凹球面超聲列陣的懸浮能力由于曲面聚焦效應而大大增強[8]. 基于超聲列陣懸浮的基礎,超聲列陣能夠實現懸浮目標的穩定懸浮,但是仍存在不足之處. 不論是李文斌[7]等設計搭建的開放式陣列懸浮試驗平臺,還是王英偉[8]等設計搭建的凹球面陣列超聲懸浮系統,或者是武二永[10]等搭建的基于換能器列陣的超聲懸浮實驗裝置,尚未實現對懸浮目標的二維、三維移動以及定位操控. 因此,本文以此為研究焦點,探究在超聲列陣懸浮的基礎上實現對粒子的二維移動,從而定向操控粒子的運動情況.
基于本文設計搭建的平面-凹球面列陣,進行單粒子懸浮定位操控的實驗操作. 首先將單粒子懸浮在裝置中心偏下方位置,以便觀察粒子在徑向、軸向的運動情況,待粒子穩定后,觀察控制板上的顯示燈,若顯示燈不亮,表示裝置處于上下控制模式,按壓控制板塊上的按鍵,改變輸入信號,實現懸浮目標的上下移動;按壓控制板塊的模式按鍵,切換控制模式,使得裝置處于左右控制模式,此時按鍵控制并實現懸浮目標的左右移動.
由于平面-凹球面模型的特殊性,在陣元數量、圓環間距和凹球面半徑等因素的多重影響下,導致聲場呈現比理論仿真更為復雜的聲場分布. 因此,在復雜的聲場中并不能實現懸浮粒子的任意移動,經過多次實驗,發現懸浮目標能夠實現圖8所示的移動.

(a)粒子原位置
在單粒子的定位移動操控中,每次觸發相位改變按鍵,懸浮目標都將進行一定的位移,但是對于粒子操控的準確性并未有較為數據化的體現. 因此為檢驗粒子操控的準確性,以上下移動為例,僅讓懸浮粒子在豎直方向上移動(圖9). 將視頻導入Tracker軟件,分析計算出每12步長(1個周期)懸浮小球走過的距離,并與理論值進行對比,如圖10和表2所示.

圖9 操縱粒子上下移動

(a)向上運動

表2 懸浮粒子在豎直方向的移動距離

在移動過程中,相位變化會使粒子出現逃離原來的波節,被吸引到新波節的情況. 縱使對懸浮目標的操控的準確度存在一定的誤差,但是在超聲列陣懸浮系統中實現對懸浮目標的移動與定位也是研究的一大進步.
3.4 穩定性實驗
評價懸浮裝置的穩定性如何,可通過對懸浮物的穩定懸浮時間來進行初步驗證[11]. 無論是解文軍[12]等研制的磁致伸縮式單軸超聲懸浮裝置,還是江海[11]等設計的超聲駐波懸浮裝置均能實現超過30 min的穩定懸浮,而在實驗中本裝置也能實現超過30 min的穩定懸浮,因此采用懸浮時間作為懸浮物穩定性方案的判斷并不全面,參考朱怡[5]等利用轉動平臺以及傾斜軌道驗證整體裝置的穩定性.
借助智能小車,帶動整體裝置分別做180,380,560 mm/s勻速運動,并以雙攝像頭形式分別拍攝遠景和近景視頻(為方便觀測,將兩側的平面列陣拆下),將視頻導入Tracker軟件,分析裝置隨小車的運動情況.
遠景視頻分析懸浮目標在水平方向的運動軌跡,近景視頻分析懸浮目標在平衡目標附近的輕微擾動程度. 雖然懸浮目標會因為裝置的運動產生偏離平衡位置的輕微擾動,但從圖11和表3總體看,3個速度的抖動方差差距不大,說明整體裝置較為穩定.

(a)180 mm/s

表3 裝置不同速度運動中懸浮粒子懸浮抖動情況
實驗中發現若裝置能夠在起始至達到勻速過程中保持穩定,則在勻速狀態中均能保持穩定懸浮,為了深入探究懸浮目標脫離裝置的臨界情況,遙控智能小車加速運動,使用手機傳感器Phyphox軟件加速度傳感器模塊[13]實時記錄實驗中加速度大小(圖12),測得裝置在加速度為3.0~7.5 m/s2時,懸浮目標脫離裝置.

圖12 Phyphox軟件測量得到裝置運動加速度
4 結 論
為了利用超聲陣列結構實現固體顆粒的懸浮操控裝置,設計了平面-凹球面的雙軸發射極的超聲列陣. 通過預實驗仿真軟件優化設計,確定了平面-凹球面的雙軸懸浮模型的理論可行性,并搭建了超聲列陣懸浮實驗裝置. 在裝置中實現了單粒子的穩定懸浮,其中懸浮粒子與仿真理論值對比,平均相對偏差為1.67%;在懸浮的基礎上,還實現了對單粒子的定位移動操控,不僅實現了懸浮粒子的徑向移動,同時也實現了懸浮粒子的軸向移動,并以豎直移動為例探究粒子移動的準確度,得出懸浮粒子從上到下運動的相對偏差為1.6%,從下到上運動的相對偏差為2.2%. 最后,通過裝置在運動過程中水平方向的直線軌跡偏離情況以及在平衡位置附近的輕微擾動程度表征懸浮目標的穩定性[14]情況. 實驗表明,當運動加速度為3.0~7.5 m/s2時,懸浮目標脫離裝置.
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
