剛-柔混合建模的玉米摘穗臺虛擬樣機開發研究
2021-05-18 01:33:36
南方農機 2021年9期
關鍵詞:模型
(河南工業貿易職業學院,河南 鄭州 451191)
0 引言
玉米收獲機摘穗臺傳動系統包括喂入裝置、摘穗裝置和螺旋輸送裝置,其傳動特性對玉米收獲機收割效率等作業性能具有重要影響[1-4]。傳統解析法分析摘穗臺傳動特性時存在建模復雜度高,變量動態關聯性差的缺點。采用可視化虛擬樣機技術可以實現摘穗臺傳動系統構件動力學關系間的動態耦合,大幅降低模型復雜度。現有關于玉米收獲機摘穗臺虛擬樣機的研究均采用剛性建模方法,忽略了構件彈性形變對傳動特性的影響,仿真精度較低。
本文以4YZW-4C 型玉米收獲機摘穗臺為實例。在ADAMS 和Solidworks 平臺上開發剛-柔混合虛擬樣機,分析玉米收割作業中摘穗臺的動力學特性。
1 虛擬樣機創建

圖1 玉米收獲機摘穗臺傳動路線
選擇4YZW-4C 型玉米收獲機摘穗臺作為開發實例。圖1 為實例摘穗臺傳動路線,表1 對應圖中主要傳動參數。由圖可知,玉米收獲機摘穗臺工作時,摘穗臺動力由主動帶輪輸入,經由二級鏈傳動和三級鏈傳動分別傳遞至動力解耦器和果穗螺旋裝置,并通過動力解耦器分別將動力傳遞至拉莖輥和撥禾鏈,用于玉米收割時的摘穗和撥禾作業。由于傳動系統的穩定性、響應速度等直接影響玉米摘穗臺的生產效率和作業質量,采用柔體動力學模塊建立傳動系統中的傳動軸和皮帶,用剛體動力學模塊建立其他傳動構件虛擬樣機模型。

表1 4YZW-4C 摘穗臺主要傳動參數
ADAMS Flex 平臺采用基于動態子結構的Craing-Bampton 修正方法,能夠大幅降低模型復雜度,提高仿真精度,在ADAMS Flex 平臺上創建傳動系統柔體動力學虛擬樣機模型。其柔體建模原理為:使用展開后的模態向量和模態坐標線性組合表征彈性構件本身的彈性位移,將彈性構件的全部自由度離散化為有限結點自由度后,其彈性形變可近似為少量模態的線性組合[5],通過截斷高階模態的低階模態集描述主模態集,單次釋放固定界面自由度得到約束模態,其數目等于子結構界面自由度數目[6],最后采用基于笛卡爾廣義坐標的拉格朗日運動方程求解[7]。
圖2 為創建后的4YZW-4C 玉米收獲機摘穗臺虛擬樣機模型。創建過程為:
1)首先通過Solodworks 實體造型庫分別創建摘穗臺機架、動力解耦器機架、果穗螺旋、傳動軸等的三維實體模型。然后將其導入Solodworks 裝配體模塊,采用共面、同軸、固定等配合關系限制零件的相對位置,完成實體零件裝配。最后將模型簡化,通過基于Solidworks 與ADAMS 的Parasolid 核心實體造型技術將其導入ADAMS 中,能夠很好地保留模型特征,防止數據丟失。
2)通過ADAMS/Machinery 庫在三維實體模型對應坐標位置分別構造輸入帶傳動、鏈傳動、果穗螺旋、齒輪組、錐齒輪組、傳動軸和機架的數字化模型,并基于約束庫添加傳動構件運動關系。其中,機架與大地、動力解耦器殼體之間沒有相對運動,采用“固定副”約束;傳動構件中的鏈輪、齒輪、帶輪與傳動軸采用花鍵鏈接,能夠同軸等速旋轉,采用“固定副”約束;柔性傳動軸分別相對于機架、動力解耦器殼體旋轉,采用“旋轉副”約束;果穗螺旋安裝在機架上,和機架間添加“旋轉副”約束。
3)在采用ADAMS/Flex 平臺上對數字化模型中的傳動軸和皮帶進行離散化處理,通過外接節點實現與其他剛性模型的動態耦合。
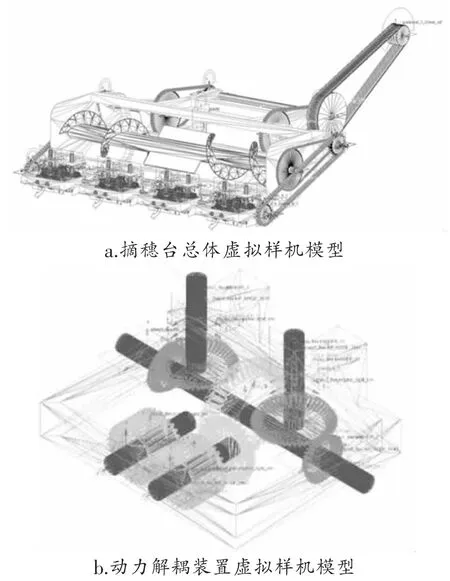
圖2 4YZW-4C 玉米收獲機摘穗臺虛擬樣機模型
為進一步體現虛擬樣機的材料外觀屬性,根據4YZW-4C 型玉米收獲機摘穗臺的材料參數,在ADAMS/View 界面對剛-柔混合虛擬樣機進行渲染,得到包含外觀屬性的玉米收獲機摘穗臺剛-柔混合虛擬樣機模型如圖3所示。
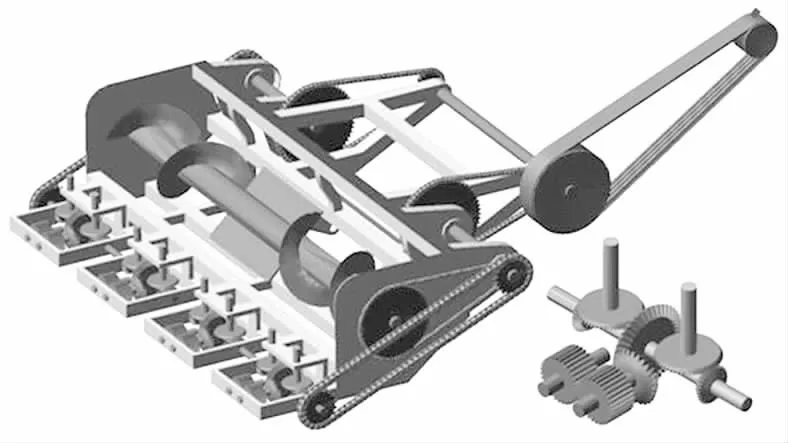
圖3 包含外觀屬性的玉米收獲機摘穗臺剛-柔混合虛擬樣機
2 動力學特性分析
2.1 虛擬試驗設計
在ADAMS/Postprocessor 平臺上進行虛擬試驗中的運動演示、數據采集和分析。由于玉米收獲機摘穗臺輸出裝置中果穗螺旋的轉速最小,標準轉速為100r/min,根據采樣定理,設置仿真周期為1s,采樣頻率為1 000Hz。
采用具有恒定轉速的輸入功率模擬摘穗臺收獲作業時的驅動功率。通過階躍函數40*360d*step (time,0,0,0.2,1)表征轉速特征,設定加載周期內輸入轉速在0.2s內逐漸增大至2 400r/min,其余時間保持恒定。根據玉米收獲機摘穗工況特征,采用階躍函數[8.88 29.8]*step(time,0,0,0.2,1)表征果穗螺旋和撥禾鏈處的負載轉矩,設定加載周期內果穗螺旋和撥禾鏈端負載轉矩在0.2s 內逐漸增大8.88N·m 和29.8N·m,其余時間保持恒定。由于拉莖輥負載變化較大,具有隨機性。根據文獻[1],玉米適收期摘穗拉力約為0.93kN,采用脈沖函數41.85*(step(time,0,0,0.2,0.2)+step(time,0.4,0,0.41,1)*step(time,0.41,1,0.42,0))表征拉莖輥處的負載轉矩。設定加載周期內拉莖輥負載轉矩在0.2s 時達到8.3N·m;0.2s~0.4s 保持恒定;從0.41s施加峰值為41.85N·m 負載轉矩脈沖。其中恒定階段用于模擬排莖過程,脈沖階段模擬摘穗過程。
2.2 仿真結果分析
圖4 為拉莖輥動力輸入軸端轉速曲線。由圖可知,加載后拉莖輥轉速振蕩最大幅值出現在沖擊加載時刻0.41s附近,表明開發的虛擬樣機可以有效體現玉米收獲機摘穗過程中由于作物排列不均勻和土質差異導致的沖擊載荷,并且能夠有效反應傳動系統中柔性體彈性形變產生的動態特征。

圖4 拉莖輥轉速特征
圖5 為動力解耦器中撥禾鏈端錐齒輪組的轉矩曲線。由圖可知,0.2s 后,從動錐齒輪的平均轉矩為29.80N·m,方向與負載轉矩相反,大小等于負載轉矩。對比圖4 可知,由于傳動軸柔體模型的阻尼特征,撥禾鏈從動錐齒輪處的波動轉矩振幅較小。主動錐齒輪平均轉矩為18.21N·m,錐齒輪組轉矩比為1.64,接近實際值。對比圖5 可知,撥禾鏈主動錐齒輪的轉矩波動較大,經分析主動齒輪轉矩波動的主要原因是:齒輪組的重合度為1.43,單組齒嚙合和雙組齒嚙合交替過程中由于輪齒形變而引起的載荷沖擊所致。
圖6 為動力解耦裝置中間軸錐齒輪組轉矩特征。由圖可知,加載過程中主動錐齒輪和被動錐齒輪在加載轉矩附近波動,符合描述排莖負載的階躍函數特征;并在0.41s 處出現沖擊,主動輪沖擊度較小,表明4YZW-4C 型玉米收獲機摘穗臺拉莖輥錐齒輪副傳動特征能夠有效吸收來自摘穗作業中的沖擊負載,提高摘穗臺傳動系統的平順性。

圖5 撥禾鏈主從動齒輪轉矩曲線

圖6 中間軸錐齒輪組轉矩曲線


圖7 拉莖輥從動錐齒輪轉矩時頻特性
圖7 為經過低通濾波和幅頻變換后拉莖輥從動錐齒輪轉矩時頻特性。由濾波后曲線可知,當系統受到拉莖輥的沖擊負載時,動力解耦裝置拉莖輥輸出軸處震蕩衰減較快,能夠迅速恢復穩定狀態,穩定時間為0.2s,表明4YZW-4C 型玉米收獲機摘穗臺傳動快速性較好。由傅里葉曲線可知,動力解耦裝置拉莖輥輸出軸處轉矩波動的基頻為286.7Hz,等于拉莖輥錐齒輪的嚙合頻率;大于撥禾鏈錐齒輪的嚙合頻率200Hz,曲線基頻對應的振蕩幅值為4.72N·m,表明4YZW-4C 型玉米收獲機摘穗臺同時進行摘穗、排莖、撥禾作業時,高頻載荷主要來自摘穗作業,傳動系統的高頻載荷主要集中在拉莖輥動力輸出軸端從動錐齒輪處。
3 結論
1)在ADAMS 和Solidworks 平臺上創建了4YZW-4C型玉米收獲機摘穗臺剛-柔混合虛擬樣機,能夠有效體現該型號摘穗臺的實體特征。
2)設計了模擬摘穗、排莖、撥禾作業時的加載函數,基于剛-柔虛擬樣機平臺開展了仿真分析,結果表明:基于剛-柔混合建模開發虛擬樣機模型能夠有效體現4YZW-4C 型玉米收獲機摘穗臺的傳動特征,各傳動構件的動力學特性符合柔體動力學特點。
3)加載沖擊度后,表明4YZW-4C 型玉米收獲機摘穗臺傳動系統的高頻載荷主要集中在摘穗臺動力解耦裝置拉莖輥端錐齒輪組;拉莖輥端主動齒輪沖擊度小于從動輪錐齒輪,傳動平順性較好;沖擊衰減較快,穩定時間為0.2s。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19