離散元法在農業工程研究中的應用現狀和展望
2021-05-19 01:49:32曾智偉曹秀龍李澤華王曦成
農業機械學報 2021年4期
關鍵詞:模型
曾智偉 馬 旭 曹秀龍 李澤華 王曦成
(1.華南農業大學工程學院, 廣州 510642; 2.華南農業大學數學與信息學院, 廣州 510642)
0 引言
目前,日益增長的高質量農產品需求對農業機械設計提出了更高的要求。過去通用的理論分析和經驗公式與實際農業生產情況差異性較大,并且農作物季節性較強,設計的樣機田間試驗時間也受限。伴隨著現代力學、數值方法與計算機技術的迅速發展,一系列數值模擬軟件對農業工程設計的輔助作用逐漸增強,計算機數值模擬技術以其強大的優越性和適用性引起越來越多農機科研人員的關注和重視[1-3]。計算機數值模擬仿真能夠一定程度上替代繁雜的田間試驗,省時、省力,可精簡樣機試制流程,提高設計質量和效率,降低設計成本;其可視性好,可對動態工作過程進行演示和仿真計算分析,為農業機械設計提供詳實的直觀信息和關鍵數據;還可對研究對象進行多層面、多維度的深度探究,揭示宏觀實驗的內在機理,為現代農業裝備數字化設計提供理論基礎。
離散元法是一種基于不連續性假設的計算機數值模擬方法[4]。與傳統理論推導和試驗分析相比,離散元法具有省時省力、成本低、結果可視化等優點;與基于連續理論的數值模擬方法(例如有限元法和計算流體動力學法)相比,離散元法在模擬非均質、非線性、各向異性的不連續體運動和動力學響應上具有模型保真度高、仿真結果準確度高等優勢。離散元模擬仿真的可信度在很大程度上取決于其接觸模型的選取和仿真參數的設定[5],因此研究接觸模型和參數標定具有重要意義。農業裝置經常涉及到大量的散體顆粒,散體顆粒既可以是其工作對象也可以是其承載介質[6]。隨著現代農業機械向大型化、復合化方向的發展,對直接與農業物料相接觸工作部件的各項性能提出了越來越高的要求,因此基于離散元法的農業機械關鍵部件優化設計技術和方法成為該領域研究的重要前沿和熱點之一。
本文對目前農業工程研究領域中應用離散元法的相關研究成果進行綜述,尤其對農業生產作業環節及農產品加工過程中的各種機械設備與裝置展開綜述。由于農業生產中常見物料多為散粒體,故本文集中探討顆粒類離散元法,對塊體和其他類型離散元方法不予考慮。同時,由于農業物料多為大宗高密度顆粒集合體,故本文主要針對軟顆粒模型方法進行討論,不涉及用于解決瞬時碰撞問題的硬顆粒模型。
本文首先對離散元法的基本原理和發展過程進行概述,介紹常用軟件及其特點,然后對常見農業物料和土壤的離散元接觸模型和參數標定進行分析,并對耕整地、種植、田間管理、收獲、農產品采后加工等方面的離散元應用現狀及動態進行綜述,對國內外應用離散元法進行農業機械設計的典型實例進行深入探討和分析,最后對離散元法在農業工程領域的應用前景和發展趨勢加以展望。
1 離散元方法概述
1.1 基本原理
離散元法又稱離散單元法,是一種用于模擬并分析散體介質系統動力學行為的數值方法,其主要思想是將模擬介質系統(理想情況下為散狀物料)看作為具有一定形狀及質量的顆粒集合,并用邊界壁面表示機械工作部件,通過賦予顆粒之間及顆粒與邊界之間特定的接觸力學模型和參數,來考慮模擬介質和工作部件不同的物理特性及其相互作用關系,然后給予一定的初始邊界條件,通過跟蹤各單顆粒的運動,利用顆粒間、顆粒與邊界間碰撞產生的能量交換來預測顆粒群的詳細運動過程,并揭示相應的介質-部件互作關系規律;其基本原理是牛頓第二定律結合不同的本構關系以反映模擬介質系統的特殊物理特性,通過動力松弛法以時間步長為單位進行顯式有限差分迭代求解;其基本假設是在很短的時間步長內,顆粒的速度和加速度為恒定值,顆粒的擾動只能傳遞給與之相鄰的顆粒,單個顆粒的形變量遠小于整體介質的變形,因此模型顆粒多為剛體,用接觸處的重疊量描述由接觸互作產生的形變量。其基本計算流程如圖1所示。首先定義顆粒、邊界、接觸模型及其初始化參數,然后以時間步長為單位對模型進行迭代運行,在每一個時間步長中,相鄰且有接觸作用的顆粒和邊界首先被確定,它們之間的接觸力由重疊量計算得到;接著計算顆粒所受合力和合力矩,并確定位移量和轉動量,更新顆粒的位置和朝向,用于下一時間步長的計算;重復這一步驟直至最后滿足用戶預設的迭代量或者迭代終止條件。
1.2 發展歷程
1971年CUNDALL[7]提出適于巖石力學的離散元法,1979年CUNDALL等[8]又提出適用于土力學的離散元法,并推出二維圓盤程序BALL和三維圓球程序TRUBAL,其后分別發展成商業軟件PFC2D和PFC3D,形成較系統的模型與方法,被稱為軟顆粒模型。隨著PFC、EDEM等基于離散元法的商業軟件成功應用,離散元技術在巖土工程、化工過程、地質災害、礦山工程、海洋工程、農業工程、機械工程、大氣科學、醫療制藥、生命科學以及其他領域得到了廣泛應用,有效地促進了這些學科的發展。離散元法在農業工程領域的應用發展可以分為以下幾個階段。
1.2.1初始期(1979—2000年)
這個階段的研究主要集中在巖石、煤礦、水壩邊坡穩定性等領域。國外離散元法在農業工程領域的應用首先是在谷物儲藏和加工上[9-10]。王泳嘉[11]介紹了離散元法及其在巖土力學工程上的應用,標志著該方法被引入我國。此階段,其在農業工程上的應用成果比較少,主要介紹了離散元法的概念,探討了其在模擬農業物料上的可行性,嘗試性地在物料流動特性分析等方面進行了應用[12-13]。受限于大量的模型理想化假設和有限的計算量,此時期的模擬仿真效果總體上與實際差距較大,離散元模型能大致反映實際系統的特征和趨勢,但遠未達到精確仿真的要求[14]。
1.2.2發展期(2001—2010年)
21世紀的前10年是初步發展階段。這時有了一些通用離散元軟件,如EDEM等,促進了離散元法的發展。期間國內相關的研究成果仍然不多,主要集中于播種、物料堆積、土壤耕作和施肥等方面。這個階段的特點是采用CAD技術與離散元法單一結合,相關的離散元仿真從二維逐漸發展到三維。由于應用對象的大量增加,農業物料性狀差異性大,已有接觸模型的局限性凸顯,模擬效果取決于接觸模型近似實物模型的程度。其中綜述性文獻[15-16]具有代表性。
1.2.3快速發展期(2011年至今)
參考有限元法等其他計算機數值模擬方法在農業工程領域的發展軌跡,其快速發展期往往長達20年,前10年相關研究成果呈井噴型增長,后10年研究成果出現調整下降,但質量仍然保持一定程度的提高。離散元法在農業工程中的應用經歷了快速發展期的前10年,接下來的10年仍將保持一定速率的增長,并且更加注重應用落地。
在快速發展時期,離散元仿真研究的目的從單一的運動力學分析向動力學及碰撞破裂機理研究等方向發展,同時考慮熱因素、化學反應以及相變在內的多因素互作影響,因此研究手段從單一的離散元模擬分析,逐步發展到多相耦合分析階段,有離散元-有限元耦合、離散元-計算流體力學耦合和離散元-多剛體動力學耦合等,不同模擬方法各有所長,各盡其能,這也擴展了離散元法的使用范圍,分析的領域也擴展到食品加工檢測、物料混合及篩分、秸稈處理、生物環境等幾乎所有涉及農業散體物料的分學科。其中綜述性文獻[17-19]具有進展代表性。
1.3 常見程序軟件及特點
隨著離散介質領域科學研究和工程應用的深入,基于離散元的高性能計算顆粒力學分析軟件受到極大的關注,各種相關計算分析軟件得到了快速發展。目前常見的軟件可分為開源軟件、商業軟件和少許自主開發內部使用測試軟件。主要開源軟件包括LIGGGHTS[20]、YADE[21]、MercuryDPM[22]等;主要商業軟件包括PFC[23]和EDEM[24]。
PFC全稱為Particle Flow Code,是第一款商業通用離散元軟件,由離散元法提出者CUNDALL作為聯合創始人創辦的ITASCA工程咨詢公司于1994年首次推出,經過多次主版本更新,目前已是第6版。PFC是基于命令流的操作界面,如圖2a所示。應用該軟件需要掌握其內置的FISH語言和命令指令才能實現人機交互,近期的版本兼容Python語言編程操作,在一定程度上降低了學習使用難度,提高了軟件可操作性。PFC支持自主輸入命令流來創建模型,其總體架構設計具有高普適性,對模擬結構相對復雜、介質組分相對多樣化的系統提供了可能。并且其所有內置算法、方程式和參數均可在用戶文檔和理論文檔中查看,方便用戶了解仿真模擬數學模型和物理意義,以及按需微調自主定義。該軟件的主要特點為:既有開源軟件的透明度和靈活性,也具有商業軟件的易用性和技術支持功能。
EDEM全稱為Engineering Discrete Element Modelling,是由英國DEM Solutions Ltd. 公司2006年開發并推出的一款綜合計算機輔助設計工程軟件。作為眾多商業軟件中的后起之秀,其發展迅猛,2019年被美國Altair Engineering公司收購并進一步整合。從建模到求解以及后處理的整個仿真過程,EDEM實現了全圖形化操作,如圖2b所示,與大多數用戶熟悉的計算機輔助設計軟件操作環境類似。其耦合功能強大,接口設置完善,率先實現了EDEM-Fluent、EDEM-ANSYS、EDEM-Adams等多種仿真平臺的無縫對接。在并入Altair Engineering公司之后,最新版的軟件支持EDEM-MotionSolve、EDEM-OpenFOAM等耦合計算求解。該軟件的主要特點為實用性高、入門簡單,同時具有較為強大的耦合求解和跨平臺操作功能。
AgriDEM是由吉林大學于建群等開發的,具有自主知識產權的集設計和性能分析評價為一體的針對農業工程領域的新型計算機輔助設計工程軟件,其基本思路是由農機部件的CAD模型建立其離散元法分析模型,實現了三維CAD軟件與自主設計的三維離散元法軟件、三維計算流體動學軟件和三維多剛體動力學軟件的集成。該軟件的特點是:在設計階段,通過修改農機部件的CAD模型,能對不同結構和尺寸的農機部件進行性能分析和評價,由此實現農機部件結構方案和尺寸參數的優化;通過農機部件的CAD模型,能進行農機部件工作過程的動態仿真,由此分析農機部件的工作機理、結構以及尺寸參數和運動參數對其性能的影響,為農機部件的優化設計提供了一種新方法[25]。該軟件創新性地將計算機輔助設計軟件與數值模擬算法有機結合,在農業機械創新設計中具有重要意義,但由于國內研發離散元軟件起步晚,基礎相對薄弱,該軟件相比于國際上先進的商業離散元軟件,在體系架構、算法可靠性、數據可視化性、系統可維護性等方面還存在差距,目前仍處于內部測試階段,并未對外開放。近年來其開發團隊不斷對其體系結構、邊界建模模塊、求解器、可視化模塊等關鍵核心功能進行改進研究[26-30]。
總體來說,不同的軟件各有特點和優勢,在實際應用過程中,應該綜合考慮模擬需求、工程實際、經費預算等因素合理選擇使用。離散元法的發展已有半個世紀,目前尚未出現成熟的專用于農業工程領域的商業化離散元軟件。究其原因,主要的難點在于農業工程領域所涉及的散體顆粒具有種類多、物理性質跨度大、隨時間季節變化顯著等特點,同時農業機械裝備在工作性質、工作方式和工作對象等方面也存在較大差異,研發農業工程領域的專用離散元軟件技術難度大、開發周期長。目前絕大部分的農業工程領域學者采用通用商業離散元軟件進行模擬仿真,因此對于農業物理離散顆粒體或者顆粒群的接觸模型選擇及其參數標定至關重要。
2 接觸模型及參數標定
2.1 參數標定簡介
農業工程領域涉及的典型散體顆粒包括土壤散體顆粒和農業物料顆粒。土壤顆粒受土壤種類和形態的影響性質各異。農業物料包括谷物種子、生物質、飼料、肥料、果蔬等(如表1)。同種屬性的顆粒性質不完全相同,不同屬性的顆粒性質更是千差萬別。由于土壤顆粒和農業物料一般為易吸濕介質,其材料特性隨著含水量的變化而變化,相比礦物或金屬塑料等顆粒材料而言,其顆粒性質更加復雜。因此,即使同種屬性的農業物料顆粒的模型及參數仍需根據實際情況分別進行建模和標定,才能保證后續模擬研究的準確性。
顆粒之間以及顆粒與邊界之間的作用關系包括彈性、粘性、塑性等接觸、摩擦和粘附等。從動力學的角度來看,這些接觸關系的共同作用效果通過法向和切向的力-位移法則以及轉動方向的力矩-角度法則來支配顆粒系統的行為;從能量的角度來看,彈性接觸積聚能量,粘塑性接觸和摩擦損耗能量,系統能量處于一個動態的變化過程中;從變形體力學的角度看,這些接觸作用反映了材料不同的本構關系,因此需要不同的接觸模型來表達。常見的應用于農業工程領域散體顆粒模擬的接觸模型包括線彈性模型、彈塑性模型、粘彈性模型、表面粘附模型、切線剛度模型等[37]。離散元仿真軟件均有一系列內置的接觸模型,盡管名稱不盡相同,但基本為以上幾種基本接觸模型的組合或者是基于基本接觸模型的微調改進,同時部分軟件提供開發接口,供用戶根據實際仿真需求自行開發特殊接觸模型。
離散元模型仿真需要的參數可分為材料本征參數和接觸力學參數兩大類。材料本征參數包括顆粒的形狀、粒徑分布、密度、彈性模量、泊松比、屈服強度等;接觸力學參數包括恢復系數、靜摩擦因數、滾動摩擦因數、粘滯阻尼、粘附系數等。材料本征參數相對容易確定,大多可以通過標準化的試驗進行測量,但接觸力學參數往往為微觀參數,非常難甚至無法通過實測得到。早期的研究多使用理論分析假設值或者經驗值,后期的學者探索使用了不同的逆向標定方法來確定,其基本思想為反復試錯調整模型參數直至模型宏觀力學行為與實際相符或非常接近。接觸模型的微觀參數與真實物料的宏觀性質不存在明顯的對應關系,對于某種特定狀態下的物料,可能存在特定的關系,但總的來說,并沒有普遍適用的關系。
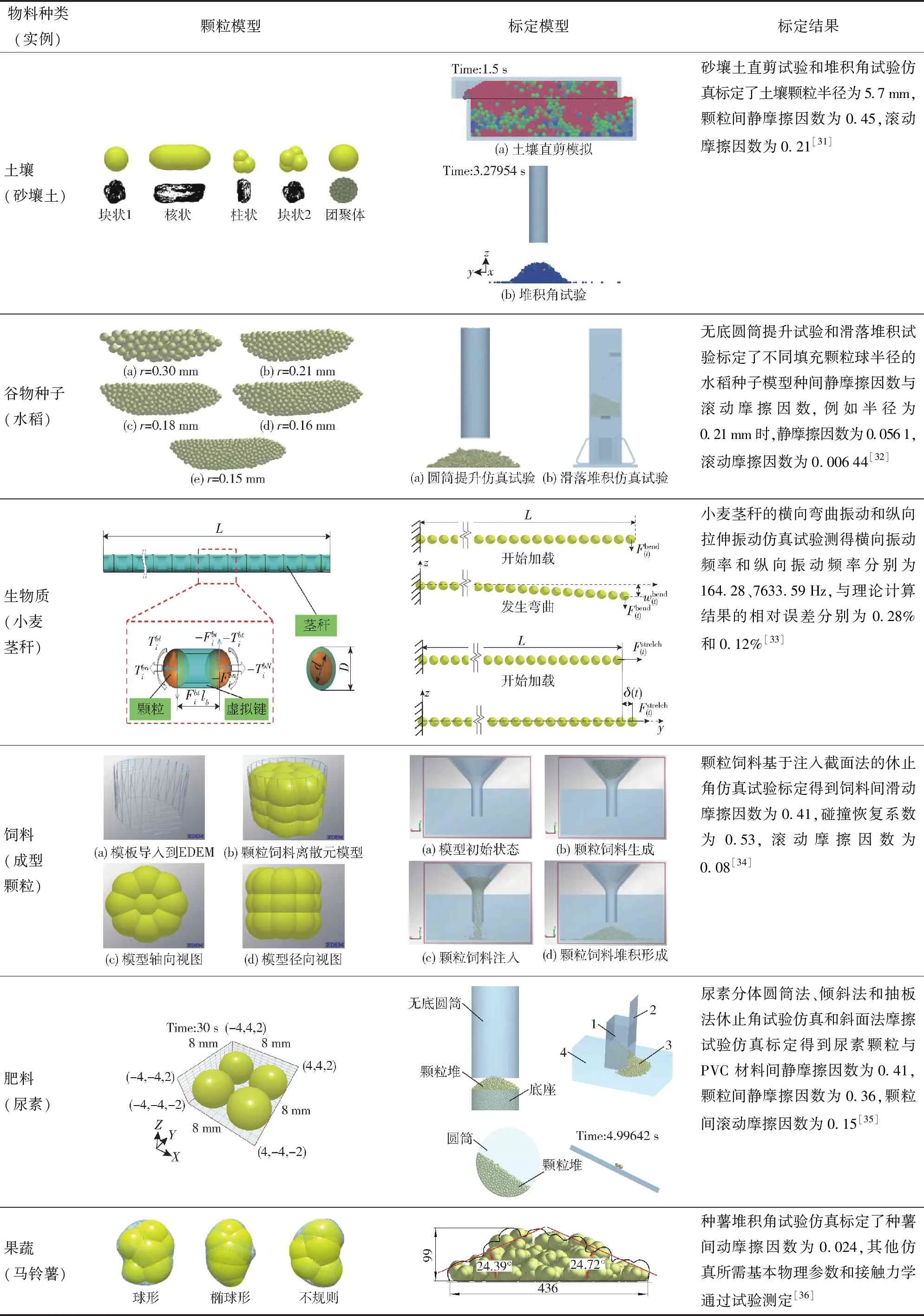
表1 常見農業物料離散元模型參數標定實例Tab.1 Common agricultural materials DEM parameters calibration
2.2 土壤散體顆粒接觸模型及參數標定
土壤在觸土部件的作用下,發生變形、破碎、移動、翻轉等一系列復雜行為。作為一種復雜的多相混合物,土壤在耕作過程中多表現出很強的離散特性,因此離散元法是分析外力作用下土壤動態行為變化過程的較理想方法。土壤特性可以分為物理特性、機械特性、動態特性等。在農業工程范疇內考慮較多的物理特性包括土粒密度、土壤容重、含水量和孔隙度;機械特性包括內摩擦角、內聚力、彈性模量、泊松比、抗剪強度、貫入阻力;動態特性包括土壤切削力和擾動特征。
ASAF等[38]提出一種確定離散元模型無粘性沙土土壤參數的方法系統。土壤顆粒為由兩個圓盤組合而成的二維模型,顆粒間接觸關系為線性模型,首先使用圓錐型和平板型土壤貫入儀進行一系列的原位沉降試驗,然后通過Nelder-Mead優化算法來尋找最優土壤摩擦因數和彈性常數組合使得試驗值和仿真值差異最小,其中優化求解的初始值通過土壤能量法和彈塑性法則來確定,以保證優化結果唯一性,最后通過3個仿真實例驗證了提出的土壤參數標定方法的正確性。
王憲良等[31]基于敏感性分析和代理模型理論,提出了一種通用的離散元土壤模型的參數標定優化方法,首先由基本試驗測得土壤離散元模型所需基本參數,然后搭建土壤直剪試驗和堆積角試驗仿真模型并進行敏感性分析得出關鍵待標定參數,然后再以這些參數為自變量,試驗實測值為求解目標構建代理模型,優化迭代求解導出最優參數組合。作者以一種砂壤土為例,用不同形狀和尺寸的顆粒組合描述土壤團聚體,選擇了兼具彈塑性和粘結性的The Edinburgh Elasto-Plastic Cohesion Model作為接觸模型,確定了模型敏感參數為土壤顆粒半徑、靜摩擦因數以及滾動摩擦因數,使用優化后的參數建立的輪胎-土壤仿真模型預測的接觸應力誤差在5%左右。
對于非粘性土或者低凝聚性土壤,例如沙土,相關學者多假設顆粒間的粘結作用效果忽略不計,采用簡化高效的接觸模型來提供仿真計算效率。張銳等[39]在EDEM軟件中使用了Herzt-Mindlin-Deresiewicz無滑動接觸模型;UCGUL等[40-41]提出的Hysteretic Spring接觸模型能夠綜合表示土壤的彈性應變和塑性變形行為;OBERMAYR等[42]在Pasimodo軟件中自行定義了一種線性模型來描述沙土本構關系。對于粘性土,由于有內聚力和粘附力的存在,接觸模型更為復雜,UCGUL等[43]基于EDEM的Hysteretic Spring接觸模型,整合了線彈性內聚力和黏結力接觸模型;武濤等[44]采用Hertz-Mindlin with JKR Cohesion接觸模型進行土壤堆積角仿真試驗,對影響粘結力的土壤顆粒間關鍵參數,如JKR 表面能、恢復系數、靜摩擦因數與滾動摩擦因數進行了標定;OBERMAYR等[45]在Pasimodo無粘土壤模型中加入了顆粒間正向吸引力的概率;而在PFC軟件中,應用較多的為采用Parallel Bond接觸模型來模擬土壤粘性[46-48]。同時由于土壤含水率是影響土壤粘性和彈塑性的主要因素,有關學者還對不同含水率的土壤顆粒模型分別進行了標定[49-50]。
2.3 農業物料顆粒接觸模型及參數標定
2.3.1糧油作物種子
糧油作物種子作為一種典型的散體顆粒物料,大多數為球形或者近球形,非常適合用離散元法來進行研究。目前應用較多的糧油作物種子包括大豆、玉米、水稻、油菜等。選擇合適的接觸模型并賦予精確標定的參數是保證糧油作物種子在播種、收獲、清選和后期加工處理等一系列過程仿真正確性的前提條件。
張榮芳等[32]采用顆粒聚合粘結的方法,使用Hertz-Mindlin with bonding接觸模型,用不同半徑的填充顆粒球構建水稻種子離散元模型,首先通過圓筒提升和滑落堆積兩種仿真試驗確定水稻種子間靜摩擦因數和滾動摩擦因數,仿真結果顯示隨著填充顆粒半徑減小、填充顆粒數的增加,仿真得到的休止角更加穩定,但仿真時長也有所增加,最后通過水稻氣固兩相流耦合仿真試驗,確定了仿真用時較低且仿真精度較高的最優填充顆粒球半徑。
HORABIK等[51]提出了一種用來確定離散元種子模型在不同濕度下恢復系數的方法。選用豌豆、大豆和油菜籽作為研究對象,使用高速攝像儀測得種子在單次彈跳試驗和反復彈跳試驗中彈起高度,使用壓電陶瓷壓力傳感器測得其沖擊力隨時間的響應曲線,模型探索了3種不同的粘彈性接觸模型仿真不同濕度種子的正確性,結果表明3種接觸模型分別適用3種不同種子,同一種種子在不同濕度下的力學性質差異顯著,隨著濕度的增加,種子恢復系數隨碰撞速度的變化關系趨于非線性,因此也要求離散元接觸模型具有非線性激勵響應特性。
BOAC等[52]匯總了大豆、玉米、小麥、高粱、水稻、大麥、燕麥、葵花籽、油菜籽等一系列谷物和油料種子的材料及接觸模型參數,并選用大豆檢驗了使用文獻中模型參數作為離散元仿真基本輸入值的可行性,單球模型和多球模型的比較結果顯示單球大豆模型能更加準確地模擬散體物料特性,最優參數組合包括顆粒恢復系數0.6、顆粒靜摩擦因數0.45、顆粒滾動摩擦因數0.05、標準差系數0.4的顆粒粒徑正態分布,以及顆粒剪切模量1.04 MPa。
劉彩玲等[53]提出了一種基于三維激光掃描法的模擬水稻等非規則球形顆粒材料的離散元模型建立方法,結果表明多顆粒聚合模型比常規橢球體模型仿真精度更高,與實際試驗結果更加接近。馬文鵬等[54]以休止角和堆積角為試驗指標,采用響應面分析法和非支配排序遺傳算法Ⅱ相結合,對苜蓿種子離散元模型參數進行了標定。基于堆積試驗和休止角試驗模擬仿真,國內外學者還對玉米[55-56]、小麥[57]、大豆[58]等常見谷物以及三七種子[59]、水稻芽種[60]等少見特殊谷物種子離散元模型的參數進行了系統標定研究。
2.3.2生物質顆粒
常見的生物質物料包括秸稈和農產品加工副產品,如谷物外殼、木材邊角料等,這些物料及其生成品與金屬塑料等工業材料有著完全不同的力學特性,主要表現為非線性和各向異性。
李永奎等[61]使用離散元對玉米秸稈粉料在單向受壓狀態下的力學行為進行了仿真分析,基于玉米秸稈粉料的黏彈特性,模型中使用軟球模型表示物料,通過調試得到模型參數取值的初始范圍,模型邊界約束條件由實際單模孔致密成型實驗確定,對比實測值和模擬值得出了離散元顆粒參數的最佳取值范圍,包括法向和切向剛度系數以及摩擦因數。
馮俊小等[62]采用離散元法對桿狀秸稈顆粒在固態發酵筒內混合狀態仿真所需參數進行了標定,桿狀秸稈為長徑比為8的模型顆粒,顆粒接觸模型采用了Hertz-Mindlin (no slip)與Linear Cohesion相結合的復合模型,綜合利用堆積實驗和轉筒內顆粒混合運動實驗對顆粒間參數和顆粒與壁面接觸參數進行了標定,仿真結果表明顆粒間靜摩擦因數是影響物料堆積性質的主要參數,而顆粒與壁面粘性系數為物料混合程度的決定性因素。
針對收獲作業谷草分離的技術要求,國內外學者基于離散元模型對柔性作物莖稈的彎曲[64]、剪切[65]、拉伸[66-67]、壓縮[68-69]、振動響應[33,70]等力學特性以及仿真參數敏感性[71]和應用效果[72]進行了一系列的研究。
2.3.3飼料顆粒
合成飼料加工過程的粉碎、混合、調質、制粒等加工環節是影響飼料質量的重要因素。
彭飛等[34]采用離散元法對顆粒飼料建模,并提出一種基于注入截面法的休止角測定裝置與方法來標定離散元參數,采用27球填充組合的方式表示擠壓成型圓柱體顆粒飼料,應用Hertz-Mindlin接觸模型,通過調用軟件數據庫和文獻確定了仿真參數的合理取值范圍。休止角仿真模擬結果顯示滑動摩擦因數為最顯著影響因素,通過回歸分析和響應面分析得到最優的顆粒飼料離散元標定參數組合,優化后的模型休止角仿真結果與試驗值相比相對誤差為3.1%。
廖宜濤等[73-74]分別對飼料油菜莖稈果莢初期和薹期的離散元模型參數進行了標定,其中初期莖稈模型應用Hertz-Mindlin接觸模型和圓筒提升堆積法標定了油菜莖稈顆粒間靜摩擦因數、滾動摩擦因數和飼料油菜莖稈-鋼靜摩擦因數;薹期莖稈模型在上述仿真的基礎上,采用Hertz-Mindlin with bonding接觸模型和莖稈彎曲破壞仿真試驗標定了莖稈顆粒法向接觸剛度、切向接觸剛度、臨界法向應力與臨界切向應力等粘結參數。
2.3.4肥料顆粒
肥料分為有機肥和化學肥料,有機肥是植物或動物及其廢棄物發酵腐熟的含碳有機物料,化學肥料包括氮肥、磷肥、鉀肥、微肥、復合肥料等,常見的有顆粒狀和液態兩種形態,目前已有學者利用離散元對顆粒狀尿素和各種畜禽糞便有機肥進行了參數標定。
溫翔宇等[35]利用Plackett-Burman試驗方法進行尿素顆粒的休止角仿真試驗,采用了分體圓筒法、傾斜法和抽板法3種不同的測試方法,并輔以斜面法測量尿素顆粒與PVC材料間靜摩擦因數仿真試驗,尿素顆粒為兩種不同直徑且分別正態分布的混合顆粒集合,接觸模型采用Hertz-Mindin (no slip)接觸模型,顯著性篩選試驗結果顯示在檢測的10個模型參數中,僅有尿素顆粒間靜摩擦因數、尿素顆粒間滾動摩擦因數、尿素顆粒與PVC 材料間靜摩擦因數在多個顆粒特性仿真試驗中對休止角有顯著影響,使用標定模型參數進行的無底圓筒法休止角驗證試驗結果表明其與實際測量值誤差在5%之內。
劉彩玲等[75]以大顆粒干燥尿素顆粒為研究對象,設置模型顆粒粒徑為正態分布,采用Hertz-Mindlin無滑動接觸力學模型,利用Plackett-Burman 休止角仿真試驗進行了模型邊界參數顯著性篩選,確定影響尿素顆粒堆積特性的顯著參數依次為尿素顆粒間滾動摩擦因數、顆粒間靜摩擦因數和顆粒與ABS 板間靜摩擦因數,仿真試驗還表明休止角與3個顯著參數呈正相關關系。利用自制靜摩擦因數測量儀結合虛擬仿真標定方法得出了最優參數組合,仿真休止角與實際試驗休止角相對誤差僅為0.36%,不同含水率下的實際試驗休止角與標定參數下的仿真休止角相對誤差均不大于3.25%。
在有機肥仿真模擬方面,國內學者普遍采用Hertz-Mindlin with Johnson-Kendall-Roberts凝聚力接觸模型來描述顆粒間本構關系,主要得益于該模型中存在顆粒間表面能參數(JKR表面能),可以用于模擬細小潮濕顆粒間的黏聚作用,因此這一參數也是顯著性參數分析和標定的重要備選對象。韓樹杰等[76]對牛糞基廄肥采用注入式堆積角試驗仿真對廄肥-廄肥恢復系數、廄肥-鋼恢復系數、JKR 表面能進行了標定,仿真堆積角與物理試驗值相對誤差為2.73%;袁全春等[77]基于圓筒提升法休止角試驗仿真標定了羊糞基有機肥顆粒間滾動摩擦因數、表面能JKR和有機肥-鋼板滾動摩擦因數,使用標定的參數進行仿真驗證試驗,仿真休止角與實際休止角的相對誤差為0.42%;羅帥等[78]對不同含水率的蚯蚓糞基質仿真標定了顆粒間靜摩擦因數、顆粒間滾動摩擦因數和JKR表面能,并且構建了休止角與含水率的關系模型。國外學者使用其他顆粒接觸模型來描述粘濕有機肥顆粒接觸關系,LANDRY[79]以豬糞基有機肥為研究對象進行直剪試驗仿真,在線性接觸模型中,顆粒剛度系數正切向比值參數為影響內摩擦角的主要因素,而對于簡化Herzt-Mindlin接觸模型而言,剪切模量則為影響表觀粘聚力和內摩擦角的主要因素。
2.3.5果蔬顆粒
常見的離散元在果蔬類農產品方面的應用包括馬鈴薯、蘋果、葡萄等。這些模型一般所需的顆粒數量較低,但顆粒的形狀復雜且往往不可過度簡化,主要用于探討果蔬產品在收獲和產后加工過程中互相之間以及與機具部件之間的碰撞機理,以及所帶來的挫傷和刺穿等損傷問題。
VAN ZEEBROECK等[81]首次提出將離散元法應用于蘋果擦傷模擬中,采用了簡化的單球模型近似蘋果,使用了非線性的Kuwabara and Kono接觸模型,使用鐘擺試驗確定了蘋果顆粒的阻尼系數和剛度系數,并通過試驗確定了模型中顆粒間接觸力峰值與實際蘋果擦傷深度的對應關系,離散元仿真蘋果在振動箱內的擦傷深度與驗證試驗值接近,但由于模型缺乏記錄顆粒間接觸位置的功能,所以多次擦傷面積和體積無法監測。SCHEFFLER等[82]在上述文獻的基礎上使用多球組合模型表示蘋果,采用基于Mindlin-Deresiewicz的正切接觸模型,并且模型可以同時連續記錄多次碰撞過程中蘋果的接觸力大小及位置,從而實現擦傷深度、面積和體積的全方位預測,墜落仿真試驗得到的沖擊力與實測值相對誤差在11%之內,轉筒和振動箱仿真試驗中擦傷各類指標參數與實測值相對誤差均在50%之內。
石林榕等[36]根據測量統計結果將馬鈴薯分為球形、橢球形和不規則3種類型,并以測量的特征尺寸平均值為依據建立種薯模型,采用Hertz-Mindlin模型,種薯的基本物理參數和接觸力學參數由試驗測定和計算得到,其中靜摩擦因數由自制的測定裝置測量得到,種薯間的動摩擦因數由堆積角模型間接預測得到。使用確定的參數進行馬鈴薯堆積角仿真試驗,模型相對誤差為1.33%;應用于設計的馬鈴薯排種裝置仿真試驗,與臺架試驗相比相對誤差小于10%。基于Herzt-Mindlin接觸模型,劉文政等[83]對微型馬鈴薯進行了標定,無底圓筒提升法堆積角試驗和落種法試驗相對誤差均小于5%。
綜上所述,參數標定的方法在獲取物料參數過程中有著重要的應用。參數標定分析過程中物料接觸模型和自身的材料屬性是確保有效模擬和輸出正確結果的關鍵。農業物料材料的特性在很大程度上取決于物料的含水率,所以顆粒間接觸模型的選取主要依據之一為物料顆粒含水率。確定農業顆粒物料參數值的方法主要為直接測量法(在顆粒物料或接觸物體表面測量物料特性,并將獲取的數值直接作為輸入參數)和批量校準法(進行相對簡單的實驗室或現場試驗,然后進行重復數值分析,通過改變各參數值,直到獲得滿意的結果)。直接測量法的優點是獲得的參數值獨立于所使用的分析軟件和接觸模型。主要缺點是如果農業物料顆粒相對較小且形狀不規則,則很難在顆粒或接觸表面測量物料屬性。對于材料屬性形狀、尺寸分布、密度、彈性模量、剪切模量和泊松比等都可通過試驗獲取,但對于物料間相互作用屬性恢復系數、靜摩擦因數和滾動摩擦因數、塑性或粘性阻尼系數等很難通過試驗獲得,通常需要通過顆粒材料參數試驗標定方法獲取,目前參數標定方法主要采用無底圓筒法、旋轉箱自流測定法和塌落測定法等,由于沒有通用方法,各標定方法存在很大差異性,不同方法獲取的參數有一定差異。因此,如何選擇合適的顆粒間接觸模型和通用的標定方法仍然是研究的難點問題之一。
3 農業工程研究領域中離散元法應用現狀
現代農業機械化作業一般包括耕整地、種植、田間管理和收獲等環節,作物收獲后的處理加工也是農業生產中的重要一環,各環節中典型農業機械裝備與離散顆粒狀農業物料的相互作用是影響其工作效率和作業性能的重要因素。不同部件的結構、作業方式、作業對象各不相同,因此對其進行性能優化的方式方法也不盡相同。表2列舉了基于離散元法的典型農業機械設備優化設計實例。
3.1 耕整地機械
耕整地過程是各類耕作機具的觸土部件對土壤進行松動、翻轉、破碎、移動等一系列作用效果的過程,為農作物的播種作業和出苗生長創造有利的條件,此過程能量消耗巨大,往往占到總農業生產能耗的一半及以上。農業土壤與觸土部件間的相互作用規律是設計、選擇、使用和調試耕作機具的基礎,研究土壤和觸土部件間的互作規律即是研究它們之間的相互作用力和作用效果,作用效果包括土壤受力后的運動規律以及機具的磨損變形程度。
方會敏等[88]建立了旋耕刀與土壤互作模型,利用土壤示蹤塊測得土壤在室內旋耕實驗中的水平位移和側向位移平均值,實測值和仿真值相對誤差在20%左右,仿真結果表明土壤位移隨深度增加而增加,中層土壤發生側向重置的情況最頻繁,可以通過提高旋耕機轉速增加土壤拋撒范圍和程度。
袁軍等[89]利用DEM-MBD耦合算法,對一種自激振動深松機作業過程進行了仿真分析,離散元模型主要為耕作土壤,采用自定義的濕顆粒模型作為接觸模型,進行了深松鏟動力學響應分析、彈簧和牽引力響應分析以及土壤擾動動態過程分析。仿真結果不僅定性地解釋了深松機減阻機理,還提供了深松鏟入土角、鏟柄質心高度、彈簧力和牽引力等關鍵設計參數的變化范圍。
胡建平等[84]建立了雙軸旋耕機-水稻秸稈-粘壤土的離散元仿真模型,秸稈為多顆粒拼接近似細高圓柱體形狀,土壤為黏結顆粒群,其材料接觸參數由堆積角試驗確定并隨土層位置變化而變化,基于仿真模型結果構建了旋耕功耗與前刀軸回轉半徑、后刀軸回轉半徑、后刀軸中心相對前刀軸中心豎直距離和前后軸回轉圓水平距離4個結構參數的數學模型,并優化求解得出了最小功耗的結構設計參數組合。
劉鵬等[90]基于DEM-CFD耦合法研究了秸稈還田機作用下玉米秸稈的粉碎和拋撒運動過程和規律,得出了粉碎刀軸轉速在滿足粉碎程度要求的前提下不宜過大,以免影響碎稈拋撒均勻度的結論。近幾年來,學者通過離散元軟件仿真模擬了鑿式[91-92]、直柄平板式[93]、箭形式[94]、側翼式[95-96]、分層交互式[97]、折線破土刃式[98]、擬合曲線型[99]等多種結構形式的深松鏟,重點分析了土壤的擾動行為。基于減小耕作阻力,優化土壤擾動效果這一目標,國內外學者對鋤式開溝器[100-102]、鏟式開溝器[103-105]、圓盤開溝器[106]等觸土部件進行了離散元仿真模擬,數值分析結果為開發設計新型低阻觸土機具提供了技術指導。
3.2 種植機械
種植機械包括播種機械和移栽機械兩大類,主要功能為將籽粒或者種苗精準定量地放入土壤中預先設定的位置,由仿形、開溝、排種、導種、覆土、鎮壓等多個關鍵工作部件組合構成,精密種植技術要求仿形機構靈活平穩、開溝器開溝深度穩定溝形一致、排種器不漏不重、導種器投送均勻性好、覆土器覆土均勻穩定、鎮壓器壓力適當且一致,明確排種器和導種器與種子的互作機理,其他部件與土壤的互作機理是優化設計種植機械的先決條件。相關學者主要應用離散元法對各種排種器的結構和工作參數進行仿真優化。
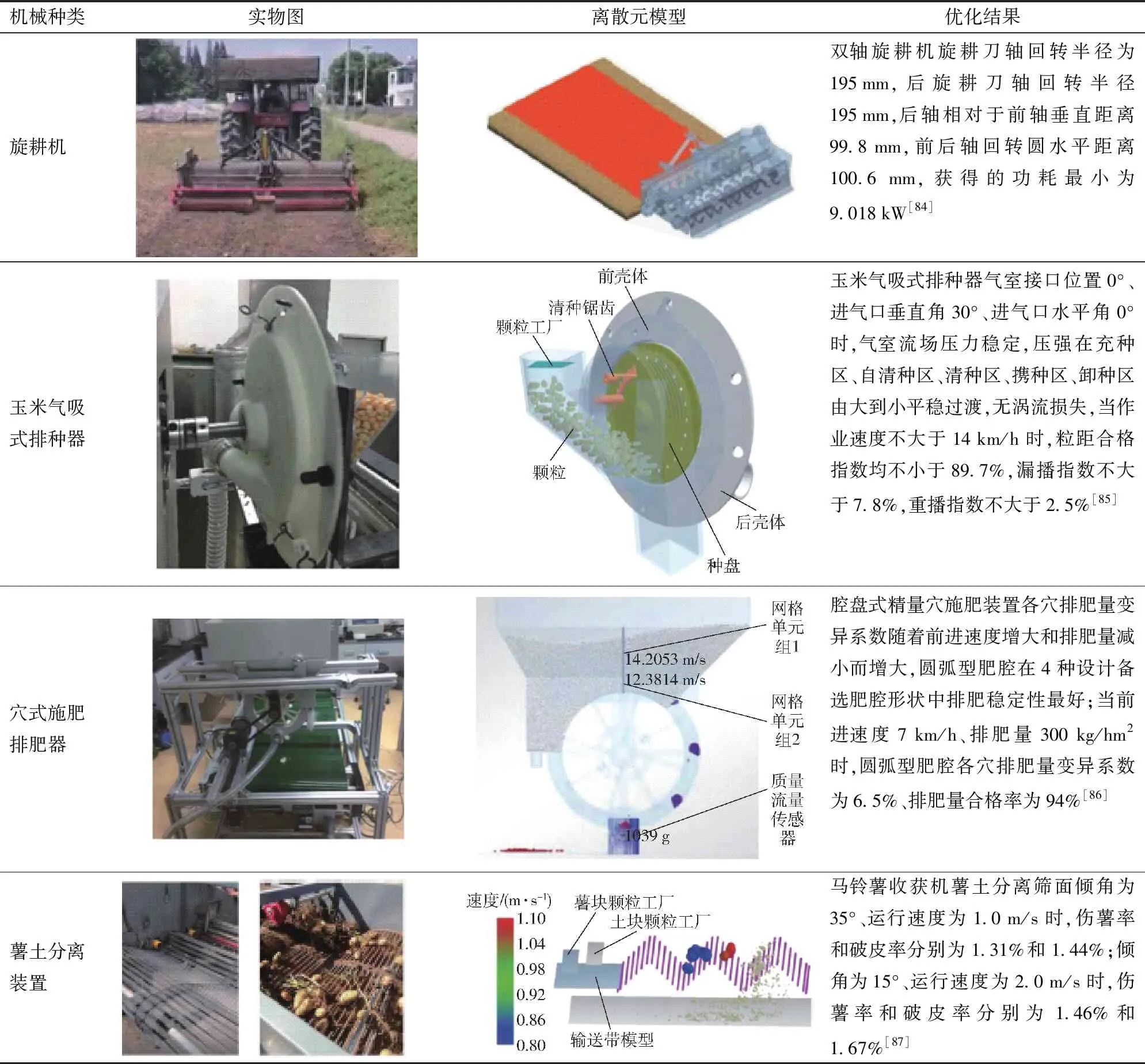
表2 基于離散元法的典型農業機械設備優化設計實例Tab.2 Typical agricultural machinery design and optimization based on DEM
丁力等[85,107]基于離散元與計算流體動力學氣固耦合法對玉米氣吸式排種器的進氣口位置和種盤結構參數進行了仿真優化,采用Bonding 黏結模型填充生成大扁形、小扁形和類圓形3 類玉米籽粒,選用充種區型孔壓強、自清種區型孔壓強、清種區型孔壓強、攜種區型孔壓強為評價指標,對進氣口位置相關的氣室接口位置、進氣口垂直角和進氣口水平角3個因素進行了多因素仿真分析,排種驗證試驗結果與仿真結果基本一致,并優于原排種器工作性能。
鹿芳媛等[108-109]基于離散元法對水稻秧盤育秧流水線的振動式精密播種裝置的定量供種機構和振動勻種機構進行了仿真分析,仿真結果不僅對后期的試驗研究具有指導作用,也為揭示試驗結果和現象內在的動力學機理提供了參考作用,基于離散元仿真優化參數設計的精密播種裝置播種合格指數提高到了92%,空穴指數控制在2%以下。
針對不同排種器結構原理,國內外學者對圓盤式[110]、窩眼輪式[111-112]、外槽輪式[113]、指夾式[114]、勺輪式[115]、凸勺式[116]等機械排種器,氣吹式[117]、 旋轉氣吸式[118]等氣力式排種器,以及機械氣力組合式排種器[119-120]進行了仿真分析及優化。針對不同的作業對象,國內外學者對三七氣吸滾筒式排種器[121]、三七氣吸窩眼輪式排種器[122]、馬鈴薯氣吸圓盤式排種器[123]、大蒜雙鴨嘴式正頭機構[124]等播種裝置進行了模擬研究。趙淑紅等[125]基于離散元法對一種V 型凹槽撥輪式導種器進行仿真優化,提高了導種投送的均勻性和穩定性。
3.3 田間管理機械
肥料是農作物生長的原料之一,現代農業生產要求探索節本增效的施肥新技術和新設備,如變量、分層、深施、穴施等精確施肥方法,實現農業生產的可持續性發展,施肥準確性和穩定性是評價施肥機作業性能的重要指標。
苑進等[126]采用離散元法對設計的聯合作業機的土肥摻混作業環節進行了建模分析,選取Hertz-Mindlin with JKR黏性力學模型作為接觸模型,模擬分析了鉆頭轉速和摻混時間對菌肥和土壤摻混均勻程度的影響。模型菌肥顆粒群和土壤顆粒群的動態變化特征表明土肥摻混分為3個階段,分別是初期的對流混合、中期的剪切混合以及后期的擴散混合,仿真結果顯示最優摻混作業參數為轉速250 r/min和摻混時間14 s。
張季琴等[127]通過構建螺旋輪排肥器離散元模型研究了控制序列不同排肥口開度和排肥軸轉速的組合對排肥穩定性的影響規律,根據實際測得的復合肥顆粒粒徑分布情況,模型將顆粒肥簡化為3種不同尺寸的組合顆粒模型。仿真試驗表明,相比于大目標施肥量工況,小目標施肥量下的施肥穩定性更取決于排肥器的控制序列,應該合理選擇開度和轉速,避開邊界值。
楊慶璐等[128]建立了空間分層施肥器作業的離散元模型,首先通過單因素仿真試驗確定了施肥調節片安裝角的合理變化范圍,然后進行二次正交旋轉組合仿真試驗,建立了排肥口出肥量與施肥裝置結構參數的回歸模型,優化求解得出當施肥調節片前端寬度為3.61 mm,后端寬度為21.52 mm,安裝角為43.23°時,排肥口上、中、下3層出肥量比例為最佳值。田間試驗進一步證實了選用優化的結構參數組合,空間分層施肥器在不同作業速度和不同施肥量要求下工作性能穩定。
在穴式精量施肥技術上,國內外相關學者對行間滾輪式穴式排肥器[129]和腔盤式精量穴施肥裝置[86]建模仿真,主要對穴施機定點機構、扎穴機構和排肥機構開展優化設計。近幾年來,相關學者采用離散元法對變量施肥器[130]、深施肥器[131-132]、分層施肥器[133]等多種新型施肥機械進行了仿真研究,模擬分析結果為施肥機具的設計提供了方向。
3.4 收獲機械
農產品的清選環節,是將目標農業物料與其他各種雜質材料無損分離的過程,對于谷物類作物,指的是谷物與秸稈、葉子等;對于根莖類作物,指的是作物與土壤、石塊、秧蔓、雜草等,分離篩選裝置的結構參數和工作參數對于分離篩選效果和收獲產品品質至關重要,而作業效率和減損防損往往有不同的參數要求,難以兼顧,因此如何優化收獲機械的結構和作業參數使其達到最佳綜合效果是學者們關注的重點。
魏忠彩等[87]構建了馬鈴薯收獲機中的波浪形篩面薯土分離機構工作的離散元模型,用多球聚合模型表示橢球形和類球形的薯塊,而土壤塊體由黏結顆粒模型表示,在一定的外力作用下黏結力鍵會發生斷裂來近似土塊的激振解聚特性。借助離散元模型綜合研究分析了篩面傾角和篩面運行速度對土塊破碎分離過程以及薯塊碰撞特征的影響,并用優化得到的結構參數和運行參數組合進行了田間試驗,相關測試指標顯示機具工作性能優良。
王萬章等[134]通過構建小麥植株離散元模型和離散元-多體動力學耦合的數值模擬仿真體系,研究了小麥從聯合收獲機螺旋輸送器喂入開始,經傾斜輸送器,直至到達脫粒滾筒連續輸送過程中的運動情況和遷移規律。
戴飛等[135]基于離散元軟件EDEM對小區小麥種子收獲機的伸縮撥指式錐型脫粒裝置進行了模擬仿真和物料運動特征解析,建立了包含小麥籽粒和短莖稈的脫粒物料顆粒模型,分析研究了脫粒物料中小麥籽粒平均速度、位移隨脫輸時間的變化規律,改進后樣機有效減小了籽粒損失率和破碎率,規避了易滯種、堵塞等問題。
3.5 其他機械
離散元法在農產品采后加工處理機械的設計研究上有著廣泛的應用[136]。侯俊銘等[137]基于離散元粘結接觸理論,構建了蓖麻蒴果在雙滾筒柔性脫殼機中脫殼過程的仿真模型,研究了蓖麻蒴果在脫殼室內群體運動規律,并進行了相關參數優化及脫殼損傷原理分析;GUZMAN等[138]采用離散元軟件PFC模擬了大麻纖維球磨機的功率和能耗,結果表明研磨速度是影響機器工作能耗最關鍵的因素。
近幾年來,離散元法也被學者應用于有機肥顆粒轉筒干燥設備[139]、飼料加工監測裝置[140]、飼料調質器[141]、螺旋喂料輸送器[142]、槽輪式補飼機[143]、混合攪拌裝置[144]、殘膜回收清雜裝置[145]等農業機械設備的設計上。
實際農業生產和試驗過程中,顆粒物料與機具表現出十分復雜的運動行為和力學行為,而這些行為通常無法直接使用現有基本理論,尤其是基于連續介質理論的方法來解釋。離散元法是根據顆粒物料本身特有的離散特性建立數學模型,將需要分析的物體看作離散顆粒的集合,這就與離散物質本身的性質相符。因此,離散單元法在分析具有離散體性質的物料時具有很大的優越性和不可替代性。并且在分析過程中可以為粒子流的運動、受力、熱量和能量傳遞提供高級的解決途徑。另外,離散單元法使用簡單的方程就可以對高復雜系統的靜態和動態行為進行模擬,使得解決實際問題的途徑簡捷可行。對于連續介質理論無法解釋和分析的物質力學行為,離散單元法可以進行較準確的預測和分析。
4 發展趨勢
離散元法在農業工程領域中的應用對提高農業機械設備研究和設計水平,縮短研發周期,節省試驗成本,提高成品的工作性能和使用壽命等具有重大意義。如何加快推進離散元模擬仿真技術全方位走向工業應用,成為農機設計者常規使用的計算機輔助設計方法和數值計算分析方法,是下一階段需要重點關注的問題。MARIGO等[146]指出缺乏有效準確的模型參數確定方法是制約離散元法在工業設計中廣泛應用的最主要原因,其次模型中顆粒的尺寸、形狀和數量等也是重要的限制條件。
離散元的接觸模型和微觀參數對于整體模型的正確性和仿真的效率具有決定性的作用,但尚未見報道通用且實用的確定方法,相關研究多為通過反復試錯來逼近宏觀試驗結果,標定參數的選取和優化仿真參數初始值的確定往往隨機性大,缺乏一種能夠被廣泛認可接受的系統方法。然而,目前大量的研究集中于離散元法在實際工程問題中的應用研究,關于接觸模型和參數標定的基礎研究工作不多。隨著實際應用對更加準確高效離散元接觸模型和參數標定方法的需求不斷增長,加強基礎研究勢在必行。另外,目前不同的軟件平臺對接觸模型和相關參數有各自的定義和命名系統,雖然大同小異但仍存在細微差別,常見的例子包括滾動摩擦因數[147]和接觸阻尼系數[148],這就造成了標定得到的參數往往僅在同款軟件類似應用中具有參考性,不具備跨平臺通用性,所以標準化仿真軟件和方法也將是一個重要的發展方向。
對于與大量散體顆粒相接觸的大型農業機械,目前的離散元模擬研究只能借助有限的顆粒數構建模型機具進行原理性的定性研究,而不可能用足夠多的顆粒對機器進行實用性的研究,模型結果對于實踐應用往往僅具有參考性而非指導性。目前模型顆粒尺寸上限為毫米級、仿真時間上限為數秒、顆粒數量上限為百萬級,無法滿足一些大型的工程應用。例如大型全尺寸耕作機械與千萬量級土壤顆粒集合的互作關系仿真,可以通過提高計算機計算和存儲能力并相應地改進離散元算法來解決。隨著計算機技術的不斷發展,這些問題會在不遠的未來得到解決,這將大大促進離散元法在農機研發設計上的廣泛應用,最終實現部分替代繁瑣冗長的樣機試制和田間試驗環節。
5 展望
隨著農業科技進步和發展,農業生產需要功能更多、效率更高、生產成本更低的農業機械。離散元法在農機設計和虛擬試驗中發揮著極為重要的作用,目前已經成為解決與散粒體相關的問題主要研究方法之一,凡涉及顆粒流動、破碎、混合等現象的應用都可以采用離散元法得到較好的仿真分析結果。總體上,離散元法作為一種基于不連續理論的數值模擬方法,實踐證明可以廣泛應用于農業工程領域的許多方面,如何提高模擬方法的通用性、仿真結果的精準性以及提高模型計算效率,是未來離散元法及其應用的進一步發展趨勢,具體包括:
(1)由于計算時間和計算機性能的限制,建模過程中簡化的圓球顆粒并不足以彌補顆粒物料形狀差異所產生的偏差。未來應繼續深入研究物料特性的微觀參數,從逼近真實物料特性的角度進行考量,重點分析顆粒間的接觸與脫離,存在的相互運動、接觸力與能量的聯系,構建完善的顆粒體接觸模型以表征顆粒體間的力學關系。
(2)離散元數值模擬能直觀展示設備實際的工作情況,極大地提高了優化改進的工作效率。進一步推動適用于農業工程領域實際問題,基于離散元法的專業通用軟件平臺的開發具有重要的意義,該平臺的成熟應用將解決現有軟件存在的針對性不足和仿真結果跨平臺通用性差等問題,為解決眾多農業機械設計研究中涉及顆粒和結構的復雜向題,提供了一個高效的工具。
(3)實際農業生產過程中涉及復雜的幾何體運動和多相流問題,單純依靠離散元法性能分析軟件已經不能滿足復雜的模擬要求,多軟件耦合已成為離散元法發展的一個重要方向,在大型農業機械應用中離散元分析軟件通常還需與其他CAE工具聯合使用,如CFD(計算流體動力學)、FEA(有限元分析)和RBD(剛體動力學)等連續體分析方法。離散元分析軟件的模型還可以同熱傳導模型、質量傳遞模型、化學反應動力學及總體平衡模型進行耦合,進而解決更加復雜的工業應用問題,擴展離散元法在農業工程領域的應用范圍。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
