靜液壓傳動拖拉機定速巡航控制系統(tǒng)設(shè)計與試驗
2021-05-19 01:50:24趙春江魏傳省付衛(wèi)強尚業(yè)華張光強
農(nóng)業(yè)機械學(xué)報 2021年4期
趙春江 魏傳省 付衛(wèi)強 尚業(yè)華 張光強 叢 岳
(1.西北農(nóng)林科技大學(xué)機械與電子工程學(xué)院, 陜西楊凌 712100; 2.北京農(nóng)業(yè)智能裝備技術(shù)研究中心, 北京 100097)
0 引言
拖拉機定速巡航控制系統(tǒng)能夠根據(jù)輸入的目標(biāo)行進速度和發(fā)動機轉(zhuǎn)速,結(jié)合拖拉機工況參數(shù)對拖拉機傳動系統(tǒng)、油門以及載荷等進行自動調(diào)節(jié),從而達到精準(zhǔn)的作業(yè)速度,這是實現(xiàn)農(nóng)機無人作業(yè)的基礎(chǔ)[1-2]。
在國外,F(xiàn)OSTER等[3]基于PID控制,調(diào)節(jié)變量泵排量實現(xiàn)了自走式割曬機速度控制;COEN等[4]設(shè)計了收獲機定速巡航系統(tǒng),該系統(tǒng)在降低發(fā)動機轉(zhuǎn)速的基礎(chǔ)上實現(xiàn)了相同的巡航速度,并降低了噪聲和燃油消耗。在國內(nèi),郭娜等[5]通過控制變速踏板來控制變量泵排量,從而實現(xiàn)定速巡航;王卓等[6]通過固定擋位、調(diào)節(jié)油門開度實現(xiàn)定速巡航;韓科立等[7]設(shè)計了電液自動機械式變速裝置,通過換擋和調(diào)節(jié)油門實現(xiàn)定速巡航控制;何杰等[8]通過機械結(jié)構(gòu)連接變速踏板和油門踏板,二者同時增大或減小,實現(xiàn)了速度控制。
目前,農(nóng)機速度調(diào)節(jié)方式多采用定油門變傳動比、定傳動比變油門、油門傳動比耦合控制3種控制策略。農(nóng)機定速巡航控制系統(tǒng)通常控制單一系統(tǒng)輸入,即僅控制油門開度或僅控制變速踏板,這導(dǎo)致系統(tǒng)功率匹配度不高,燃油經(jīng)濟性較差。因此,本文以約翰迪爾4720型靜液壓傳動拖拉機為平臺,開展農(nóng)機定速巡航控制策略研究,根據(jù)拖拉機工況對傳動系統(tǒng)、油門等進行協(xié)同控制,實現(xiàn)拖拉機定速巡航控制,并提高燃油經(jīng)濟性[9-12]。
1 系統(tǒng)原理與硬件設(shè)計
1.1 靜液壓傳動系統(tǒng)調(diào)速原理
約翰迪爾4720型拖拉機采用靜液壓傳動系統(tǒng),主要由發(fā)動機、變量泵和定量馬達組成的靜液壓傳動以及機械式變速器組成,其速度調(diào)節(jié)通過調(diào)節(jié)油門踏板控制發(fā)動機轉(zhuǎn)速、調(diào)節(jié)變速踏板控制變量泵排量兩種方式來實現(xiàn)[13-18]。靜液壓傳動拖拉機傳動系統(tǒng)的原理如圖1所示。
1.2 總體設(shè)計
定速巡航控制器通過CAN總線接收車載計算機發(fā)送的拖拉機目標(biāo)速度和發(fā)動機目標(biāo)轉(zhuǎn)速,通過拖拉機電控單元(Electronic control unit, ECU)讀取發(fā)動機油門開度、轉(zhuǎn)速與轉(zhuǎn)矩百分比,以及拖拉機行進速度等工況參數(shù),結(jié)合牽引阻力傳感器測量的拖拉機牽引阻力與升降油缸位置傳感器測量的平地鏟升降液壓缸位移,根據(jù)定速巡航控制策略,計算控制量,通過控制油門電動調(diào)節(jié)機構(gòu)、作業(yè)負載調(diào)節(jié)機構(gòu)以及拖拉機自有的靜液傳動裝置,對發(fā)動機轉(zhuǎn)速、拖拉機速度以及平地鏟高度進行調(diào)節(jié),實現(xiàn)平地作業(yè)工況下拖拉機定速巡航控制[19-21]。系統(tǒng)總體設(shè)計如圖2所示。
1.3 硬件設(shè)計
1.3.1控制器與傳感器選型
控制器采用定制的C261控制器。該控制器集成了2路標(biāo)準(zhǔn)CAN總線接口,可實現(xiàn)與車載計算機的總線通訊,以及拖拉機工況的采集,具有27路I/O端口,滿足系統(tǒng)控制和信號采集需求[22]。編程環(huán)境為CoDeSysV2.3。
牽引阻力傳感器為合肥力智傳感器有限公司定制的LZ-ZXD21型軸銷傳感器, 12 V供電,量程為0~20 kN,輸出電壓為0~5 V,靈敏度為2.0 mV/V。
平地鏟升降油缸位置傳感器采用深圳米朗公司的KTC1-100mm型直線位移傳感器,5 V供電,量程0~100 mm,輸出電壓0~5 V。傳感器及其安裝位置如圖3所示。
1.3.2油門自動調(diào)節(jié)機構(gòu)
油門自動調(diào)節(jié)機構(gòu)由電動油門調(diào)節(jié)器、油門拉線和油門調(diào)節(jié)桿組成,如圖4所示。其工作原理為:電動油門調(diào)節(jié)器固定在油門支架上,電動油門調(diào)節(jié)器中電機動力經(jīng)減速器傳遞到自動油門拉線,從而帶動油門調(diào)節(jié)桿繞油門調(diào)節(jié)桿連接銷轉(zhuǎn)動,最終帶動油門位置傳感器轉(zhuǎn)動。發(fā)動機電控單元讀取油門位置傳感器的輸出電信號,對發(fā)動機轉(zhuǎn)速進行調(diào)節(jié)。油門限位裝置用來限制油門位置,以免油門開度過大對發(fā)動機造成損害。
1.3.3作業(yè)負載調(diào)節(jié)執(zhí)行機構(gòu)
作業(yè)負載調(diào)節(jié)執(zhí)行機構(gòu)包括牽引式平地鏟、平地鏟升降油缸、比例換向閥、銷軸傳感器等,如圖5所示。其工作原理為:平地鏟通過牽引架與三點懸掛下拉桿連接,地輪起到支撐作用,銷軸傳感器實時檢測拖拉機的牽引阻力;通過比例換向閥控制拖拉機后液壓輸出,從而控制液壓油缸的升降,根據(jù)電阻式位移傳感器測得的活塞桿位移,推算平地鏟高度,實現(xiàn)平地鏟的精準(zhǔn)升降[23-24]。
2 系統(tǒng)軟件設(shè)計
2.1 靜液壓傳動拖拉機系統(tǒng)
靜液壓傳動拖拉機是一個復(fù)雜的雙輸入系統(tǒng),發(fā)動機轉(zhuǎn)速和變量泵排量都可以控制拖拉機的行駛速度。在北京市昌平區(qū)國家精準(zhǔn)農(nóng)業(yè)示范基地,選取平整的水泥路面,啟動拖拉機自動導(dǎo)航系統(tǒng),使拖拉機保持直線行駛,通過田間計算機向控制器發(fā)送控制指令,改變油門開度和變量泵排量,記錄拖拉機速度,探求車速與油門開度、變量泵排量控制信號(PWM信號)占空比的關(guān)系[25-26]。
2.1.1油門開度與車速關(guān)系
固定PWM信號占空比為21%,油門開度在0%~70%之間變化,記錄不同油門開度下穩(wěn)定的車速,得到PWM信號占空比為21%時車速與油門開度的關(guān)系。將PWM信號占空比分別固定為18%、24%、27%、31%、34%和37%,重復(fù)上述試驗,得到各PWM信號占空比下油門開度與車速的關(guān)系(圖6)。
2.1.2PWM信號占空比與車速關(guān)系
固定油門開度為5%,PWM信號占空比在18%~37%之間變化,記錄不同占空比下穩(wěn)定的車速,得到油門開度為5%時車速與PWM信號占空比的關(guān)系。將油門開度分別固定為10%、20%、30%、40%、50%和60%,重復(fù)上述試驗,得到各油門開度下PWM信號占空比與車速的關(guān)系(圖7)。
對油門開度、PWM信號占空比和車速進行數(shù)據(jù)擬合,得到圖8所示的擬合曲面。
根據(jù)試驗數(shù)據(jù)擬合得到車速與油門開度、占空比的關(guān)系式為
v=0.204 5-0.015 29α-0.020 76β+ 4.795×10-6α2+9.066×10-4αβ+1.095×10-3β2
式中v——拖拉機速度,m/s
α——油門開度,%
β——PWM信號占空比,%
通過擬合車速與油門開度、PWM信號占空比的關(guān)系,可以判斷不同目標(biāo)車速下油門開度與PWM信號占空比的選擇范圍。
控制器根據(jù)接收的目標(biāo)車速和目標(biāo)油門開度計算PWM信號占空比的初始值并輸出,可以提高響應(yīng)速度,快速達到目標(biāo)車速。
2.2 拖拉機工況數(shù)據(jù)獲取
根據(jù)ISO 11783協(xié)議解析拖拉機CAN總線的工況數(shù)據(jù),可以得到發(fā)動機實際轉(zhuǎn)矩百分比、發(fā)動機轉(zhuǎn)速、油門開度和拖拉機行駛速度等參數(shù)[27-30],如表1所示。
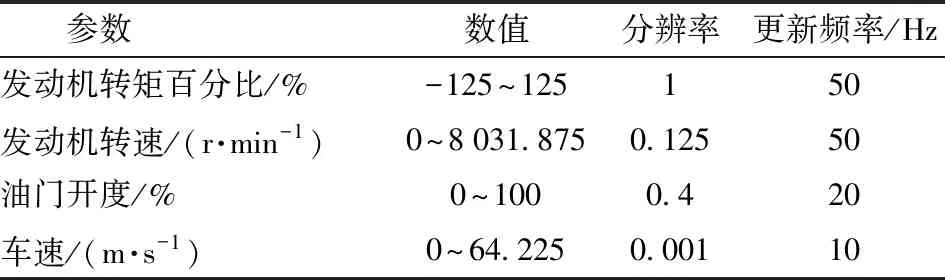
表1 拖拉機工況參數(shù)Tab.1 Tractor working condition parameters
2.3 控制策略分析
提出3種速度控制策略,分別為定油門控制策略、耦合控制策略和協(xié)同控制策略,具體為:油門開度固定,僅調(diào)節(jié)變量泵排量;發(fā)動機轉(zhuǎn)速和變量泵排量同增同減,雙輸入耦合為單輸入;不同工況下選擇不同的目標(biāo)發(fā)動機轉(zhuǎn)速,同時實現(xiàn)過載保護。
2.4 軟件設(shè)計
控制系統(tǒng)軟件由自動導(dǎo)航模塊、拖拉機工況采集模塊、傳感器模塊、油門控制模塊、變量泵排量調(diào)節(jié)模塊、作業(yè)負載調(diào)節(jié)模塊、通信模塊等組成。
定速巡航控制系統(tǒng)軟件流程(圖9)為:系統(tǒng)初始化后,控制器通過信號采集系統(tǒng)獲取當(dāng)前車速、油門開度、發(fā)動機轉(zhuǎn)速、平地鏟高度和牽引阻力等工況數(shù)據(jù),控制器接收車載計算機控制指令,當(dāng)接收到平地鏟控制指令時,讀取平地鏟目標(biāo)高度,計算控制量,調(diào)節(jié)平地鏟高度。控制器讀取目標(biāo)巡航車速,根據(jù)目標(biāo)車速、實際車速、牽引阻力與阻力閾值判斷當(dāng)前工況,當(dāng)阻力小于閾值、車速小于目標(biāo)車速80%時,即為起步工況,采用油門排量耦合控制策略,調(diào)節(jié)油門開度和變量泵排量使車速上升;當(dāng)牽引阻力小于閾值、車速大于目標(biāo)車速80%且小于穩(wěn)態(tài)車速時,即為接近目標(biāo)速度工況,采用變排量降油門控制策略,逐漸減小油門開度使發(fā)動機轉(zhuǎn)速保持在油耗較低的經(jīng)濟轉(zhuǎn)速范圍內(nèi),同時調(diào)節(jié)變量泵排量達到目標(biāo)巡航車速;當(dāng)牽引阻力小于閾值且阻力沒有大范圍波動、車速誤差在2%以內(nèi)時,即為穩(wěn)態(tài)工況,采用變排量定油門控制策略,保持油門開度不變,調(diào)節(jié)變量泵排量使車速保持目標(biāo)巡航車速;當(dāng)牽引阻力小于閾值、牽引阻力有較大的變化時,即為負載擾動工況,采用變排量變油門控制策略,根據(jù)牽引阻力判斷負載等級,計算與之對應(yīng)的目標(biāo)油門開度,同時調(diào)節(jié)變量泵排量保持巡航車速;當(dāng)阻力大于閾值時,即為過載工況,采用降載控制策略,抬升平地鏟。執(zhí)行下一個周期。
3 試驗
3.1 試驗條件
為驗證拖拉機速度控制系統(tǒng)的準(zhǔn)確性和3種控制策略的效果,以約翰迪爾4720型拖拉機為平臺,集成定速巡航控制系統(tǒng)和自動導(dǎo)航控制系統(tǒng)(圖10),在北京市昌平區(qū)國家精準(zhǔn)農(nóng)業(yè)示范基地進行水泥路面空載、田間空載和平地作業(yè)3種工況下的定速巡航控制試驗。通過查閱拖拉機使用手冊,將拖拉機的經(jīng)濟轉(zhuǎn)速設(shè)置為1 200 r/min。
選擇地面平整的地塊,進行牽引阻力控制閾值的測量試驗。設(shè)定平地鏟高度為-2 cm,拖拉機行駛車速為1.0 m/s,進行田間平地作業(yè),通過銷軸傳感器測量得到牽引阻力的最大值約為4 500 N。因此,設(shè)定牽引阻力閾值為5 000 N。
3.2 試驗結(jié)果與分析
3.2.1不同工況下的速度試驗
在水泥路面空載、田間空載和平地作業(yè)3種工況下進行了油門排量協(xié)同控制策略試驗,目標(biāo)速度為1.0 m/s。3種工況下拖拉機車速如圖11所示。
對圖11數(shù)據(jù)進行分析,得到3種工況下協(xié)同控制策略的速度控制試驗結(jié)果,如表2所示。
3.2.2平地作業(yè)工況下的不同控制策略試驗
在平地作業(yè)工況下進行了定油門、油門排量耦合、油門排量協(xié)同3種控制策略的速度控制試驗,目標(biāo)速度為1.0 m/s。3種控制策略下拖拉機的車速和發(fā)動機轉(zhuǎn)速如圖12、13所示。
對圖12、13數(shù)據(jù)進行分析,得到平地作業(yè)工況
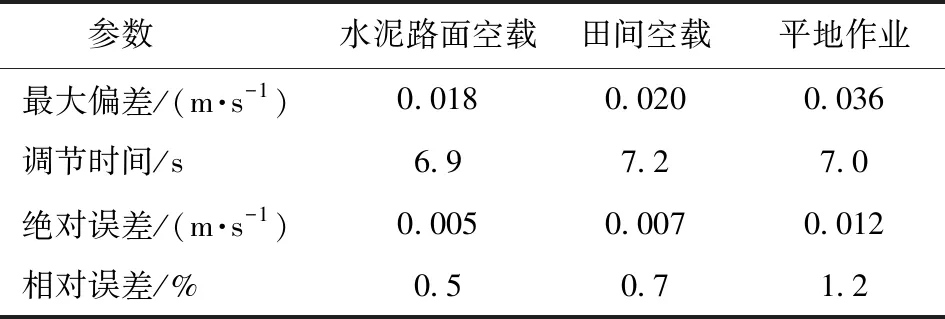
表2 3種工況下協(xié)同控制策略試驗結(jié)果Tab.2 Test results of cooperative control strategy under three working conditions
下3種控制策略的速度控制試驗結(jié)果,如表3所示。

表3 平地作業(yè)工況下3種控制策略試驗結(jié)果Tab.3 Test results of three control strategies under flat ground operation
3.2.3討論
采用定油門控制策略時,由于起步時發(fā)動機負載較大,所以將目標(biāo)發(fā)動機轉(zhuǎn)速設(shè)置為1 360 r/min,僅通過調(diào)節(jié)變量泵排量達到目標(biāo)速度。
采用耦合控制策略時,在0~4.7 s,發(fā)動機轉(zhuǎn)速隨變量泵排量的增加而增加至1 360 r/min,并穩(wěn)定在1 360 r/min左右。
采用協(xié)同控制策略時,在0~3 s,發(fā)動機轉(zhuǎn)速從1 000 r/min增加至1 350 r/min;在3~5 s,發(fā)動機轉(zhuǎn)速從1 350 r/min降低至1 200 r/min,隨后保持在1 200 r/min;拖拉機速度在0~3 s快速增加至0.94 m/s,從第3秒開始,發(fā)動機轉(zhuǎn)速下降,PWM信號占空比增大,車速緩慢增加,直至7.0 s時達到目標(biāo)速度。協(xié)同控制策略可以實現(xiàn)拖拉機保持巡航速度的同時,降低發(fā)動機轉(zhuǎn)速,減少燃油消耗。
4 結(jié)論
(1)研究了一套拖拉機平地作業(yè)定速巡航控制系統(tǒng),設(shè)計了速度調(diào)節(jié)和負載調(diào)節(jié)裝置,建立了靜液壓傳動拖拉機油門開度、變量泵排量與速度對應(yīng)的數(shù)學(xué)模型。
(2)提出了一種降低發(fā)動機轉(zhuǎn)速的定速巡航控制策略,在起步后降低發(fā)動機轉(zhuǎn)速,使拖拉機在較低的發(fā)動機轉(zhuǎn)速下達到目標(biāo)巡航速度,可以節(jié)省燃油。
(3)在水泥路面空載、田間空載和平地作業(yè)3種工況下進行了協(xié)同控制策略試驗,結(jié)果表明,協(xié)同控制策略的速度絕對誤差分別為0.005、0.007、0.012 m/s,速度相對誤差分別為0.5%、0.7%、1.2%,速度控制精度較好。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
