溫室種植精準對靶噴霧機器人的研究
2021-05-21 02:09:18喻晨
農業技術與裝備 2021年3期
關鍵詞:系統
喻 晨
(新疆農業科學院 農業機械化研究所,新疆維吾爾自治區 烏魯木齊 830000)
就當前植物植保機械來講,采用的手動噴霧器80%依然是背負式。噴霧器在應用過程當中存在明顯的跑、冒、滴、漏等情況,對于農藥利用率造成很大影響,而且在噴藥過程中,時常出現施藥中毒情況,尤其是在溫室環境條件下進行噴藥,中毒事件時有發生。為此,對于植株和病害部位進行精準對靶噴霧施藥成為當前的研究重點[1]。但就目前情況來講,在溫室種植過程當中,精準對靶噴霧機器人方面的研究尚處于初始階段,還有很多問題亟待探索,尤其是非結構環境條件下噴霧機器人工作過程當中,面對作業對象多義性的形態和顏色以及復雜的背景信息,溫室作業過程中空間改變以及光照條件改變,都給機器人感知信息、運行控制和規劃軌跡帶來很大影響[2-5]。基于此,本文主要以溫室種植過程中黃瓜霜霉病為研究對象,充分考慮黃瓜種植模式以及溫室環境,對精準對靶噴霧機器人進行設計,通過計算機視覺,來獲取黃瓜病害信息,通過系統分析,開展對靶噴霧。
1 對靶噴霧機器人結構與系統原理
該系統主要包括機械臂以及移動平臺、變量噴嘴和病害診斷分析系統等幾部分(見圖1)。其中1 為移動平臺屬于高架軌道,通過電機(0.1~0.3 m/s)進行驅動,2 為導軌和黃瓜壟相互垂直,設置在和地面相差3.0 m 的高度,移動平臺能夠通過黃瓜植株頂部進行運動。噴桿運動利用機械臂控制,達到對靶效果,在直角坐標系統上機械臂可以自由地進行各個方向運動,運用剪切式升降結構控制z向運動,直線導軌控制x、y方向,噴桿和旋轉定位相平行,x向通過腕部來達到控制效果。
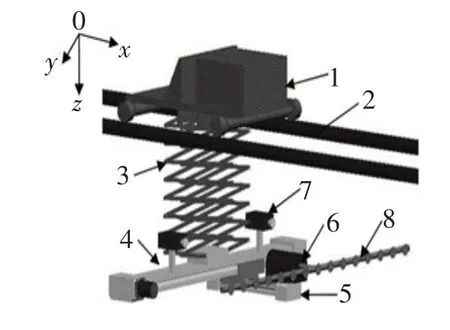
圖1 對靶噴霧機器人結構示意Fig.1 The schematic diagram of target spraying robot structure
對于病害信息診斷系統而言,主要在y 軸直線導軌4 上安裝固定2 臺彩色攝影機(由雙目視覺系統構成),對前視場作物具體情況進行實時圖像采集,同時對作物病害情況做出準確判斷,控制施藥量。
噴桿8 長為1.2 m,噴嘴6 按照0.2 m 的距離均勻分布其上,主要利用高速電磁閥實現控制,機器人針對噴嘴區域相應病害信息,利用PLC 來實現電磁閥控制,保證噴藥過程中,噴藥時間和培養量的控制。
在機器人運行過程中,根據溫室黃瓜栽培壟的特點,將磁定位預設在導軌之上,噴霧機器人有效啟動,而且在導軌運動基礎上將機器人啟動實施噴霧。首先進行定位檢測,準確標記,之后停車,根據對應位置,下降剪切式升降臺,當與黃瓜高度1/2 相符合時,噴桿隨著x向伸出,同時運用腕關節回轉,使其垂直。當前的場景圖像利用雙目視覺系統來完成,對圖像當中存在的病害情況進行判斷,然后根據直線導軌y向、x向直線導軌以及噴稈從一側端部移動至另一側,找準病害位置,合理控制電磁閥,保證對靶噴霧,直至將所有工作全部完成。
2 自由度機械臂設計
植株在溫室結構條件下都是規則的生長,所以進行機械臂整體構架機器人設計中,逆運動學是對靶噴霧機器人的主要特征,而且擁有解耦3 個關節。因此,為了避免有運動學奇異點發生,控制和減少系統復雜性,在圖1 當中,施藥4 自由度機械臂在移動平臺下吊裝,可以自由地針對各個方向植物病害進行精準對靶噴藥,利用回轉腕關節來實現噴桿控制,讓其確保合適的姿態來精準噴藥,機械臂具體運動參數見表1。
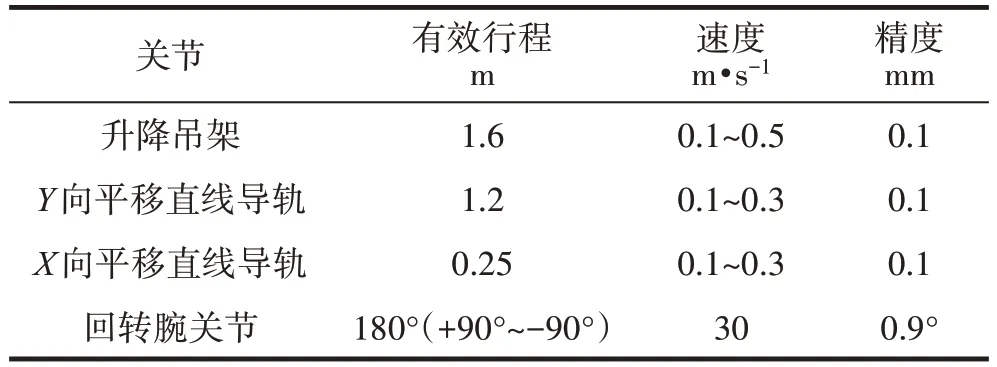
表1 機械臂關節參數Tab.1 The joint parameters of manipulator
系統中z向運動是難點,剪叉式升降吊架不僅具有很好的剛性強度,而且具有較大的工作范圍。在移動軌道運動平臺過程中,升降吊架保持在收縮的狀態,使移動過程當中機器人與導軌和黃瓜植株出現的干涉問題得到很好解決,并確保機器人穩定運行。
剪叉式升降吊架在固定端進行驅動,其操作的角度應當進行8°~35°保持,為了實現相應的工作高度,對靶噴霧機器人運用10 個剪刀叉來實現相應高度,地面位置上確保0.9~2.5 m 有效行程,運用2副剪叉構成整體結構,在前后方向上布置,充分考慮操作角度,在吊架最低點位置上合理設定,水平線和剪叉桿保持30°夾角,使吊架具有較好的整體穩定性。
3 獲取靶標信息
為使靶標信息更加準確獲取,應對植株病害作出全面分析,確保定量精準性。如對黃瓜霜霉病信息進行獲取時,通過計算機視覺獲取病害信息,依照感染葉片病害及其紋理、顏色,判斷其感染情況,黃瓜間距為1.4 m,其株距為0.4 m。
通過雙目視覺系統應用,搭載OK_AC1300 型2 臺攝像機,工作位置相距黃瓜中心0.9 m,攝像機間距為0.6 m,可以完成1.2 m×1.2 m采集范圍。
直接計數法以及分級計數法是測定傳統植物病害情況的主要方法,然而針對對靶實時噴霧系統,發生病害在時間以及空間上存在非均勻性的特點,植株不同以及不同的葉片,和較大差異性的病害程度,所以需要構建適于溫室條件下評價病害的標準。文中把圖像采集區域進行6×6 個單元劃分,各單元當中按照0.2 m×0.2 m 設置最小的靶標單元,設置最小的單個噴嘴噴幅,處理圖像之后,對各個單元病害感染情況進行統計,噴霧過程當中,依照感染情況,確定噴霧時間。
4 結語
運用精準對靶噴霧,可以使農藥用量大幅度減少,還能保證作業安全,避免對環境造成更大污染,保證食品質量。本文對精準對靶噴霧系統進行研究分析表明,噴霧系統采用高架導軌模式,在溫室種植過程當中,可以根據籬架型作物,按壟種植特點精準噴霧。自由度噴霧機器人運用直角坐標,聯合應用電磁閥對噴嘴進行控制,實施對靶精準變量噴霧。研制的溫室種植精準對靶噴霧機器人,可以精準地獲取黃瓜病害,對作物病害感染情況以及分布特征等精確確定,能夠實現精準對靶施藥。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32