斜鉸旋翼操縱力矩生成研究
2021-05-21 14:03:00王彪任至楷張寶晴唐超穎
機械制造與自動化 2021年2期
關鍵詞:方向
王彪,任至楷,張寶晴,唐超穎
(南京航空航天大學 自動化學院,江蘇 南京 211106)
0 引言
目前無人旋翼飛行器已經廣泛應用于攝影、檢修和安保等領域,且微型旋翼飛行器大多采用多旋翼構型。其主要原因是,除了具有對稱結構的多旋翼飛行器,大多數旋翼飛行器都需要機械斜盤和驅動舵機來調節旋翼拉力方向。隨著機體尺寸縮小,直接按傳統結構等比例縮小操縱機構對制造工藝和材料提出更高的要求,這不利于飛行器的大規模應用。目前已開展了一些對于旋翼操縱機構的簡化研究,例如GEORGE S與SAMUEL P合作為美國國防高級研究計劃局研制了一款微型共軸旋翼飛行器[1],其采用了一種名為傾斜電機的機構,直接改變旋翼姿態,便于進行機體操縱;清華大學的呂俊剛等人制作了一種利用慣性與材料彈性對旋翼進行操縱的機構[2],通過電機的瞬時加速帶動彈性連桿變形達到控制旋翼槳距的目的。本文所探究的斜鉸旋翼最先由PAULOS J于2013年提出[3],其后又對該設計的工程應用進行了分析[4],該設計利用電機的加減速,結合特殊的機械機構,簡化了整個旋翼推進系統,但同時也加大了旋翼控制的復雜度與難度。國內目前對于斜鉸旋翼只有一些零星的嘗試[5],未見對斜鉸旋翼本身機理進行深入研究。因此本文將在建立旋翼數學模型基礎上對斜鉸旋翼應用方式進行深入研究。
1 斜鉸旋翼原理分析與建模
1.1 斜鉸旋翼機械結構
斜鉸旋翼最初的設計理念即為減少多余的控制部件,只利用驅動電機就能夠達到傳統旋翼類似的操縱效果,因此斜鉸旋翼與傳統旋翼結構存在一定區別。其主要由槳葉、槳夾、槳轂組成,槳夾與槳轂之間存在一個傾斜鉸鏈的設計,運行時槳夾能夠繞斜鉸做相對于槳轂的轉動,具體部件如圖1所示。

圖1 斜鉸旋翼組成框圖
1.2 斜鉸旋翼工作原理
對于斜鉸旋翼推進系統的要求是其能夠在去除自動傾斜器及相關舵機的同時保留實現周期變距和改變總矩的能力。結合前文斜鉸旋翼機械結構可知,電機帶動旋翼做勻速旋轉的情況下,槳葉與槳轂之間無相對運動,槳葉隨槳轂做勻速圓周運動,槳距角不發生變化;當電機帶動槳轂做變速轉動時,槳葉慣性和空氣阻力會使槳葉相對槳轂產生超前/滯后的擺振運動,又由于斜鉸的特殊結構,在產生擺振運動的同時也會有槳葉圍繞變距軸線的旋轉產生,即槳葉的變距運動。只要驅動電機以一個合適的周期性變化的轉速帶動槳轂轉動,就能帶動槳葉產生類似周期變距的效果。
1.3 斜鉸旋翼動力學模型
由于機械結構的改變,斜鉸旋翼槳葉運動相對于傳統槳葉更加復雜。基于作者所在實驗室前期研究工作[6],可將槳葉運動分解為槳葉的圓周平動與繞點轉動來進行分析。
槳葉的圓周平動較為簡單,槳葉相對慣性系姿態不變,隨槳轂做圓周運動。繞點轉動較為復雜,在槳根處建立坐標系,該坐標系同樣隨槳根做圓周平動,槳葉轉動采用歐拉法描述,轉動建模過程如圖2所示。
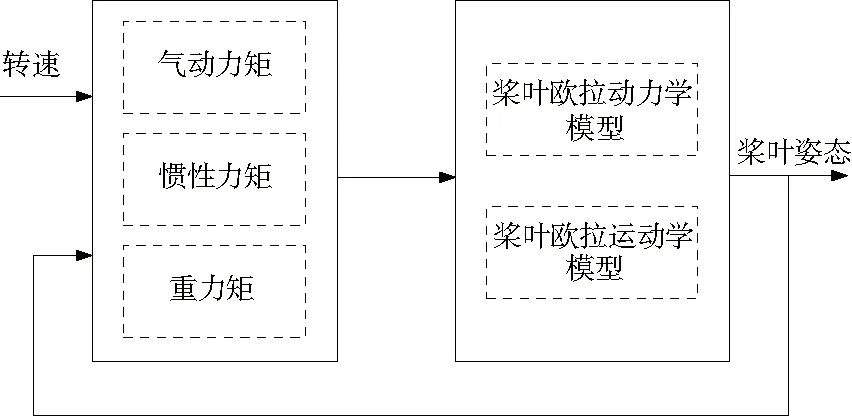
圖2 斜鉸旋翼非線性數學模型
圖2中輸入為槳轂轉速;輸出為槳葉姿態角。通過擬合得到槳葉升力系數與阻力系數,結合槳葉當前姿態角,采用葉素法求得整片槳葉所受的氣動力矩;慣性力作用于槳葉質心,其產生原因在于槳葉的轉動分析是在槳根坐標系這一非慣性系內進行,其值為FI=mBaB,mB為槳葉質量,aB為槳根坐標系的向心加速度,方向為槳軸中心指向槳根。
2 斜鉸旋翼應用方法研究
根據已有的研究[6],斜鉸旋翼與傳統旋翼的主要區別在于,傳統旋翼依靠自動傾斜盤推動槳距角造成槳盤傾斜來改變拉力方向,從而形成對機體的操縱力矩,而斜鉸旋翼利用兩片槳葉滯后/超前運動形成槳距角,造成拉力差來形成操縱力矩。雖然這種力矩生成方式簡化了操縱機構,但也意味著需要重新考慮其操縱力矩的生成規律。
2.1 有效操縱力矩生成規律研究
在旋翼旋轉過程中槳葉位置實時變化,這種情況下,斜鉸旋翼產生的力矩方向也是一直在變化的。為了使產生的力矩能夠對機體進行有效的操縱,期望在一定時間內旋翼每旋轉一周生成的合力矩也就是有效操縱力矩的大小與方向在各旋轉周期內一致。為了達成期望的效果,需要固定力矩幅值與其相位之間的關系。
以頻率5 Hz的正弦轉速信號作為上文所建立斜鉸旋翼動力學模型輸入,旋翼輸出力矩如圖3所示。
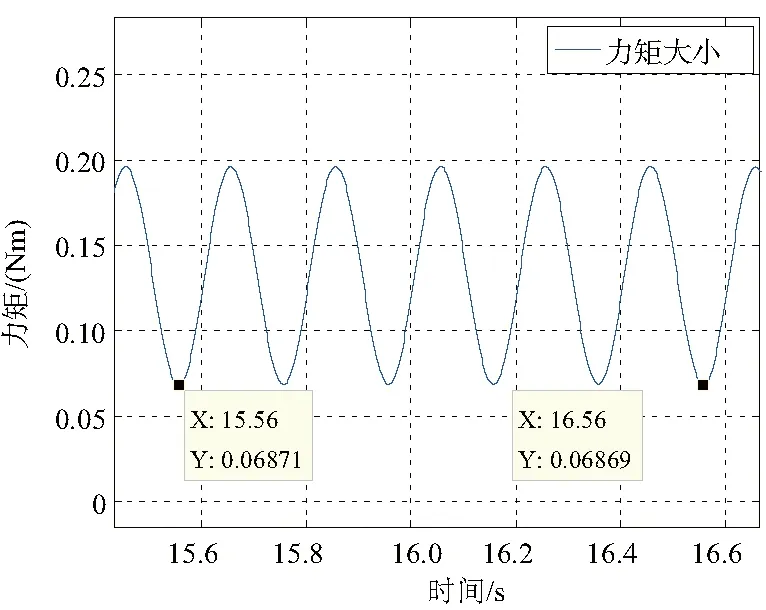
圖3 5 Hz波動轉速情況下的力矩大小
從圖3中可以看出力矩幅值大小出現了與轉速同頻率的波動,但其并不能對機體產生有效操縱,原因如圖4所示。
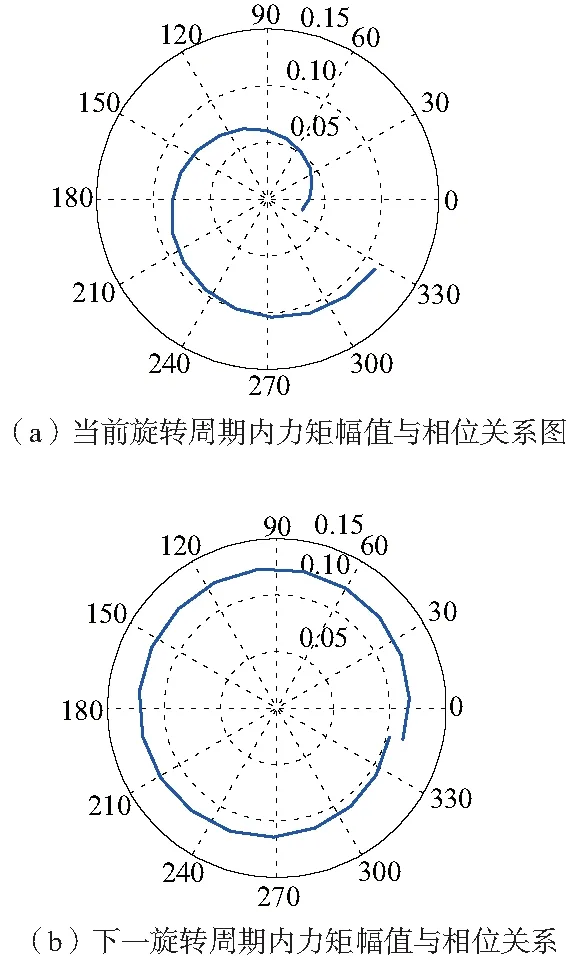
圖4 不同旋轉周期內瞬時力矩幅值與相位關系
圖4展示了相鄰兩個旋翼旋轉周期內產生的力矩幅值與相位間的關系,這種不固定的關系將造成不同周期內的有效操縱力矩方向和幅值不一致,無法持續地形成對機體某一方向上的操縱力矩。
參考傳統旋翼周期變距原理,自動傾斜盤保證了在每個旋轉周期內,槳葉在相同角度處的變距角是一致的。對于斜鉸旋翼,為了固定力矩幅值與相位間的關系,同樣需要保證槳葉變距角與轉角之間存在固定的關系。由前文分析,變距角波動頻率與轉速波動頻率一致,那么可以合理假設,只要轉速波動頻率與轉速頻率(1 s內旋轉的圈數)呈倍數關系,變距角與相位之間的關系就是固定的。
為使轉速波動頻率與轉速頻率一致,將電機轉角反饋至轉速控制器,融合后的參考轉速指令形式如下式:
Ω=Ω0+Asin(nφ)
(1)
式中:Ω0為基準轉速;A為波動轉速;φ為電機轉角。該指令保證了轉速在旋翼旋轉一周內完成一次周期變化。首先設n=1,以該指令作為輸入進行轉角反饋仿真實驗,獲得了槳軸坐標系xOy平面內的力矩,選取仿真時間25 s~50 s內的數據,瞬時力矩的大小和方向按極坐標形式給出,如圖5所示。
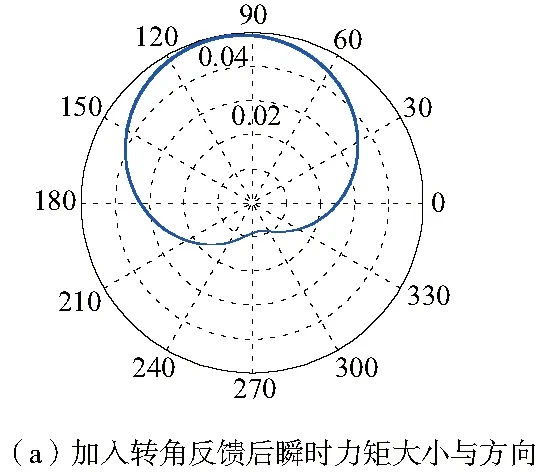
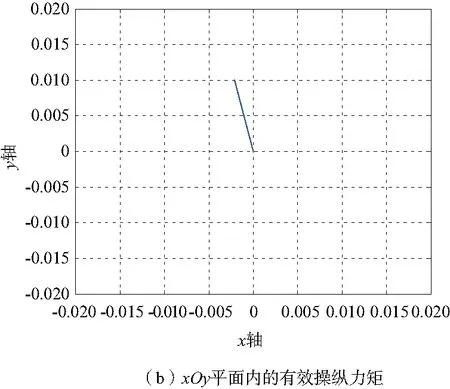
圖5 加入轉角反饋后的瞬時力矩與有效操縱力矩
從圖5(a)可以直觀地看出xOy平面左半平面內的力矩幅值明顯大于右半平面,圖5(b)所表示的有效操縱力矩也證實了這一點。假設機頭朝向y軸正方向,這一力矩可以認為是使機身右傾的滾轉力矩。
嘗試n=2、3,即轉速在旋翼一個旋轉周期內轉速完成了2次和3次周期變化,仿真結果如圖6所示。
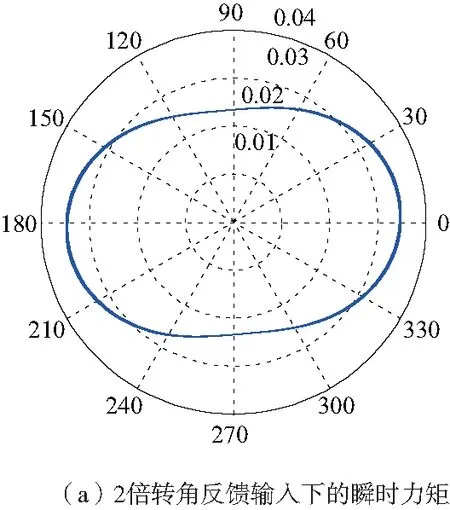

圖6 不同轉角反饋輸入下的瞬時力矩
觀察圖6很容易發現,隨著n的增大,瞬時力矩在極坐標內愈發趨近于圓形,將不能對機體產生有效的操縱。同時,加大轉角反饋的倍數會給后續帶來控制上的困難,倍數越高,其要求的轉速波動頻率越高,這對控制器的性能和控制算法均提出了極高的要求,不易于工程實現。通過上述分析與仿真,得到了適合的轉速輸入信號為
Ω=Ω0+Asin(φ)
(2)
2.2 有效操縱力矩方向控制研究
上節通過仿真分析確定了有效操縱力矩的生成規律,但僅關注了有效操縱力矩的生成。在實際使用中,無人直升機飛行過程中不同的操縱需求還要求能夠控制有效操縱力矩的方向,本節將重點探究對于有效操縱力矩方向的控制。
由于斜鉸旋翼槳葉姿態受旋翼轉動加速度的影響,合理猜測:改變波動轉速信號相位能夠改變有效操縱力矩方向。因此在轉速輸入信號中人為加入滯后角φ0,此時轉速輸入信號形式為:
Ω=Ω0+Asin(φ-φ0)
(3)
固定基準轉速Ω0與波動轉速A,分別設置滯后角φ0為0°、90°、180°、270°,仿真結果如圖7所示。
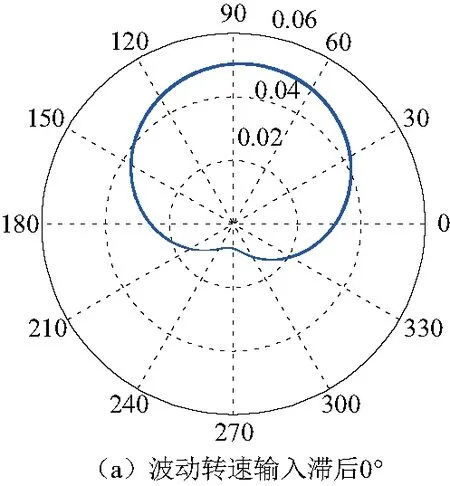
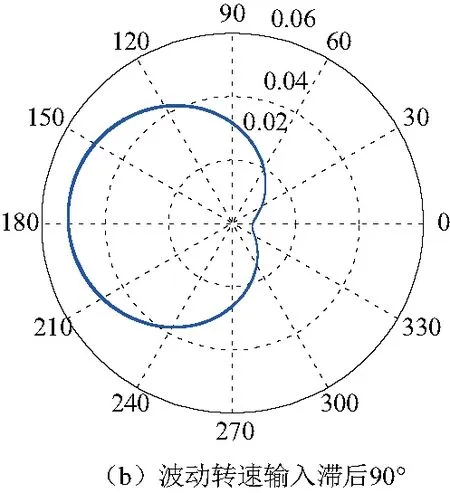
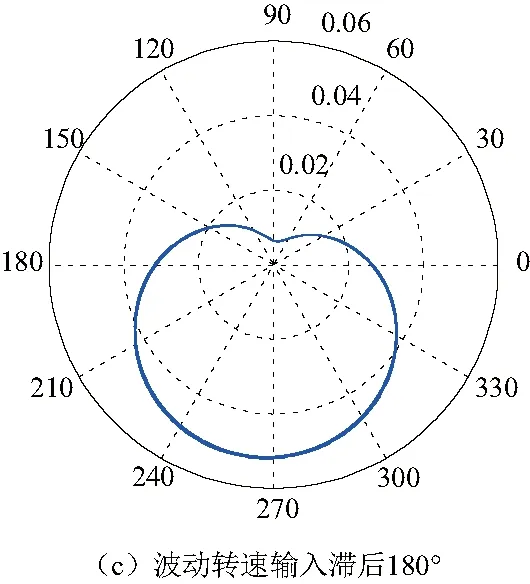
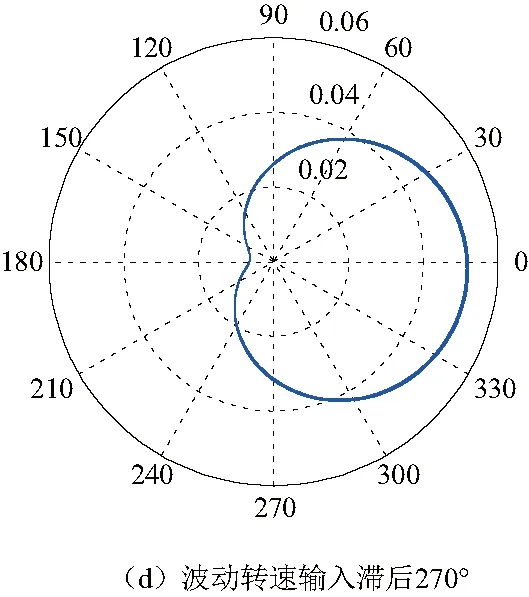
圖7 滯后角對力矩方向的影響
從圖7可以看出旋翼上生成的力矩均值方向隨著轉速輸入中滯后角的變化而變化,且與滯后角固定存在著90°的超前。該仿真實驗驗證了輸入中加入的滯后角可以有效操縱生成力矩的方向。
3 有效操縱力矩調節規律驗證
上節主要討論了用于產生有效操縱力矩的轉速調節規律,本節將考慮旋翼實際應用情況,探討在不同情況下該轉速調節方式的有效性。
由于驅動單元不能直接操縱槳葉位姿,因此槳葉當前的運動狀態會對之后的運動產生影響,例如在槳葉分別處于滯后狀態和超前狀態下同時對電機施加加速指令,雖然槳葉都會因為慣性而產生相對于槳轂的滯后轉動,但因初始槳距角不同,在轉動相同角度后,兩種初始狀態下的槳葉槳距角不同,影響生成的力矩。為驗證其影響程度進行以下仿真實驗:
1)在不同時間點轉速閉環輸入中加入波動;
2)在不同時間點閉環輸入中滯后角階躍。
仿真實驗1):實驗開始后旋翼轉速進入1200 r/min的穩態,分別在10 s、12 s、14 s、16 s時在閉環輸入中加入20 r/min的波動,槳距角仿真結果如圖8所示(本刊黑白印刷,如有疑問可咨詢作者)。
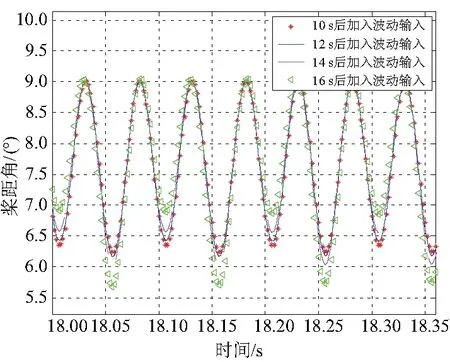
圖8 4種輸入下的槳距角變化
圖8展示了在仿真18 s后上槳葉的槳距角變化情況,可以看出不同時間點加入波動轉速會對槳距角幅值產生一定的影響,但其相位始終一致,這樣只會對力矩大小產生影響,對于有效操縱力矩的方向無明顯影響。
仿真實驗2):旋翼初始轉速為(1220±20) r/min,0°滯后角,在10 s、20 s、22 s、24 s時加入40°滯后角,上槳葉槳距角仿真結果如圖9所示。
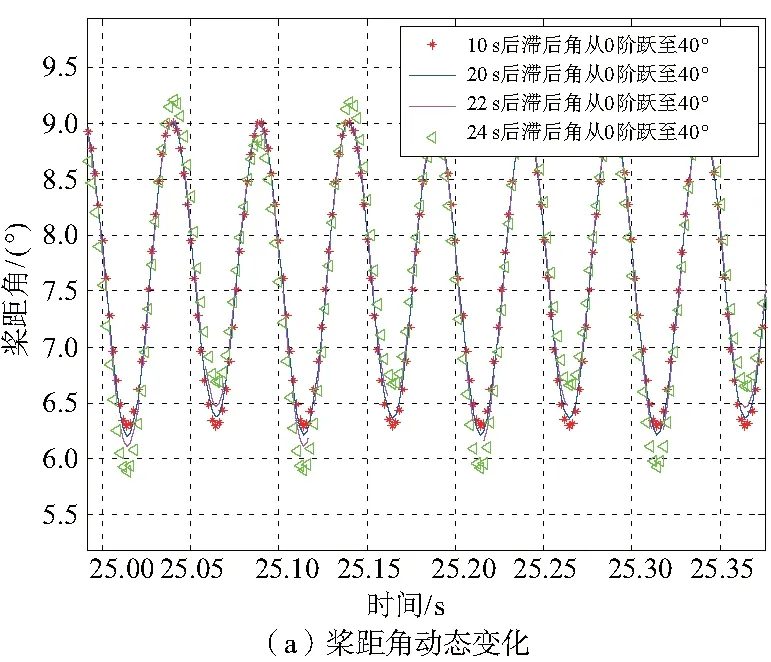
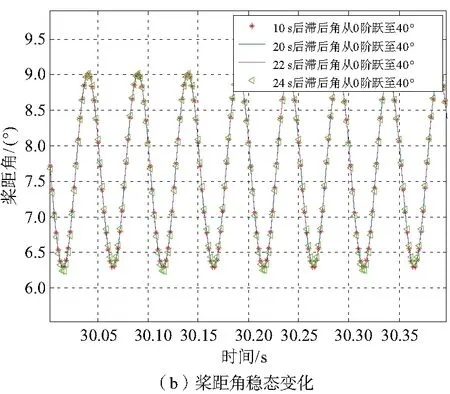
圖9 滯后角階躍導致的槳距角變化
以10 s時滯后角階躍導致的槳距角變化趨勢作為參考,從圖9中可以很容易看出:在出現滯后角階躍后,槳距角的變化存在著一段時間的動態過程,動態過程中槳距角相位相同,僅幅值存在一定的變化,與仿真實驗1)結果類似;同時,在5 s內槳距角即可進入穩定的正弦變化,滯后角階躍開始的時間對于進入穩定變化狀態的槳距角無影響。
仿真實驗1)模擬了斜鉸旋翼直升機從懸停狀態轉變為前飛或是側飛狀態所進行的旋翼操縱,仿真實驗2)模擬了斜鉸旋翼直升機任意兩次姿態變化間的旋翼操縱。
上述仿真結果說明斜鉸旋翼能夠快速響應轉速的變化,且無論處于何種工作狀態,對于相同的輸入,斜鉸旋翼的響應總是相似的。
4 結語
本文研究了斜鉸旋翼的應用可行性,特別是其對于旋翼飛行器機體姿態操縱的能力。首先通過建立斜鉸旋翼數學模型,結合對于斜鉸旋翼工作原理的分析,得出基于轉角反饋的轉速調節規律,并通過系統仿真,計算出在此調節規律下斜鉸旋翼能夠形成有效的操縱力矩。其次,在已有轉角反饋的情況下,人為加入滯后角,達到了控制斜鉸旋翼有效操縱力矩方向的目的。考慮到斜鉸旋翼特殊的操縱方式,其工作狀態可能對后續工作狀態產生影響,因此考慮實際操縱需要,給出相應的轉速輸入進行仿真分析。仿真結果表明斜鉸旋翼在不同狀態下對于相同轉速輸入的槳距角響應總是相似的,且能很快達成同步。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
