傾轉(zhuǎn)旋翼飛行器定翼機(jī)模態(tài)模型預(yù)測控制
2021-05-22 02:20:26毋萌王彪唐超穎劉春生
機(jī)械制造與自動化 2021年2期
毋萌,王彪,唐超穎,劉春生
(南京航空航天大學(xué) 自動化學(xué)院,江蘇 南京 211106)
0 引言
傾轉(zhuǎn)旋翼飛行器既有直升機(jī)的垂直起降功能,又有定翼機(jī)的高速巡航飛行能力,融合了兩種飛行器的優(yōu)點,在軍民領(lǐng)域的用途非常廣泛[1]。傾轉(zhuǎn)旋翼機(jī)在擴(kuò)大飛行包線的同時,也帶來了許多新的技術(shù)問題。傾轉(zhuǎn)旋翼飛行器在起降時工作在直升機(jī)模態(tài),在高速巡航時工作在定翼機(jī)模態(tài),兩種模態(tài)通過發(fā)動機(jī)短艙傾轉(zhuǎn)實現(xiàn)。在短艙傾轉(zhuǎn)過程中,飛行控制被控對象的結(jié)構(gòu)、參數(shù)以及所處環(huán)境都有很大的不確定性。如今國內(nèi)外關(guān)于傾轉(zhuǎn)旋翼機(jī)飛行控制問題的理論研究算法有PID[2]、滑模變結(jié)構(gòu)控制[3]、粒子群優(yōu)化[4]、反饋線性化[5]、自適應(yīng)控制[6]等,仍有問題存在或者待解決,如一些算法的魯棒性與抗干擾能力不強(qiáng),在切換控制時容易出現(xiàn)抖振現(xiàn)象,有的對理想化環(huán)境較為依賴等。本文以橫列式雙傾轉(zhuǎn)旋翼飛行器XV-15為原型,開展定翼機(jī)模態(tài)縱垂向的模型特性分析與控制研究。
1 建模與對象特性分析
傾轉(zhuǎn)旋翼飛行器動力學(xué)系統(tǒng)的全量方程雖然準(zhǔn)確,但是線性化的飛行運動方程更適合于以成熟的線性系統(tǒng)控制理論來進(jìn)行飛行控制系統(tǒng)的設(shè)計,因此需要將本課題組建立的六自由度非線性模型[7]簡化為三自由度模型,并進(jìn)行線性化近似處理,得到常系數(shù)線性微分方程形式的數(shù)學(xué)模型[8]為:

(1)
其中:
式中狀態(tài)量X、控制量U、測量輸出Y依次為:
X=[uwqθh]T、U=[δcδe]T、Y=[uwqθh]T。
其中:h為地面坐標(biāo)系下飛行高度;u、w為機(jī)體軸的縱垂速度分量;θ為機(jī)體俯仰角;q為俯仰角速率。特別注意以上各變量含義是相對于平衡點的偏差量。X、Z、My為機(jī)體軸系的前向力、垂向力、俯仰力矩;Iy為轉(zhuǎn)動慣量;g為重力加速度;u0、w0、θ0為配平值。
根據(jù)參考文獻(xiàn)[9],選定βM≥50°、速度>62 m/s為定翼機(jī)模態(tài),僅用總距δc與升降舵δe操縱。以下為短艙角βM=50°、βM=90°前飛狀態(tài)的A、B陣:
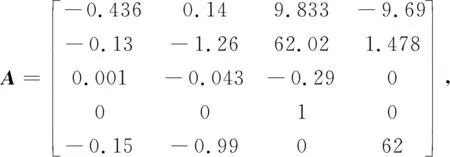
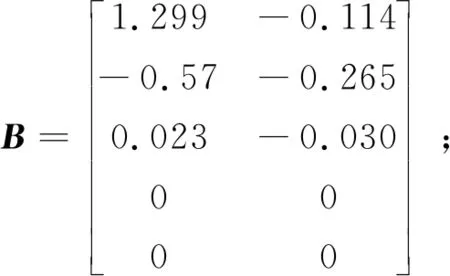
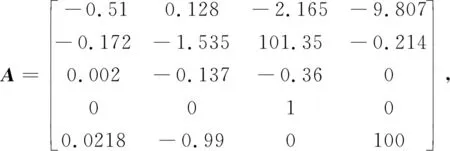
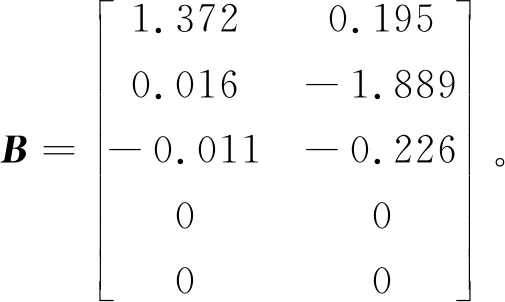
A是系統(tǒng)狀態(tài)矩陣,B是操縱導(dǎo)數(shù)矩陣,其變化反映了短艙傾轉(zhuǎn)時,傾轉(zhuǎn)旋翼機(jī)動操縱性的快時變性。傾轉(zhuǎn)旋翼機(jī)的定翼機(jī)模態(tài)與普通定翼機(jī)不同,飛機(jī)部件相互間存在氣動干擾,氣動特性復(fù)雜,動力學(xué)模型不僅隨著前飛速度變化,也會隨著短艙角傾轉(zhuǎn)不斷變化[10]。氣動布局發(fā)生變化,慣性積、力臂與坐標(biāo)系間的轉(zhuǎn)換矩陣改變,旋翼拉力、對質(zhì)心的力矩大小方向隨之改變,升降舵操縱引起的俯仰力矩變大,總距通道的響應(yīng)與俯仰通道的耦合程度變化,導(dǎo)致俯仰、沉浮運動間的耦合氣動特性大范圍變化,使得傾轉(zhuǎn)旋翼機(jī)定翼機(jī)模態(tài)的飛行控制復(fù)雜,富有挑戰(zhàn)性。
2 控制方案設(shè)計
本文選擇研究基于線性狀態(tài)空間模型的模型預(yù)測控制(MPC)算法進(jìn)行傾轉(zhuǎn)旋翼定翼機(jī)模態(tài)的縱垂向飛行控制。MPC能充分利用模型狀態(tài)量信息,自然處理執(zhí)行器與狀態(tài)量約束,易于在多變量系統(tǒng)上實現(xiàn),可以控制具有復(fù)雜動態(tài)行為的系統(tǒng),有利于受控系統(tǒng)的物理實現(xiàn)。
定翼機(jī)模態(tài)時,速度通道即前飛速度的改變由前向力改變,前向力主要由總距操控改變旋翼拉力,因此總距能夠直接影響速度,速度運動體現(xiàn)為短周期運動;垂向通道即高度的改變通過俯仰運動來實現(xiàn),是典型的內(nèi)外環(huán)結(jié)構(gòu),俯仰運動為內(nèi)環(huán),垂向運動為外環(huán),由升降舵控制俯仰運動間接控制高度。因此垂向運動體現(xiàn)為長周期運動,振蕩周期長、衰減較慢[11]。本文采用級聯(lián)結(jié)構(gòu),控制結(jié)構(gòu)如圖1所示,外環(huán)是高度控制,給定輸入為參考高度,輸出是期望俯仰角θr。內(nèi)環(huán)完成前飛速度與俯仰姿態(tài)控制,輸入是期望前飛速度和外環(huán)提供的期望俯仰角,輸出為總距與升降舵的增量值,再加上配平值即為傾轉(zhuǎn)旋翼機(jī)的操縱量。與單控制器控制策略相比較,使用級聯(lián)結(jié)構(gòu)可以通過降低每個控制器的復(fù)雜性來簡化整體控制難度,易于處理作為控制量輸入的狀態(tài)變量所受到的約束條件[12]。
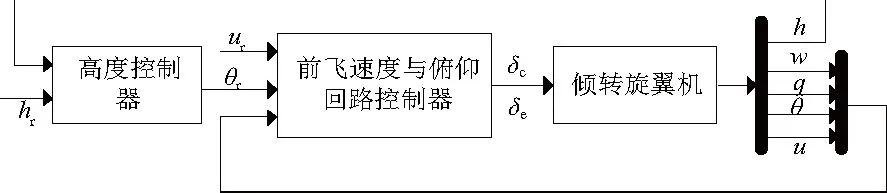
圖1 定翼機(jī)模態(tài)級聯(lián)MPC控制結(jié)構(gòu)示意圖
首先,將被控對象式(1)按采樣周期Tc進(jìn)行離散化后的狀態(tài)空間模型為:
(2)
從式(2)中抽取出內(nèi)、外環(huán)被控對象狀態(tài)空間模型,然后分別推導(dǎo)預(yù)測模型,進(jìn)而完成內(nèi)、外環(huán)控制器設(shè)計[13]。外環(huán)預(yù)測模型中狀態(tài)量、控制量、被控量依次為:
內(nèi)環(huán)預(yù)測模型中,狀態(tài)量、控制量、被控量為:
由于內(nèi)外環(huán)的設(shè)計方法、過程相同,下面以內(nèi)環(huán)為例。參考經(jīng)典預(yù)測模型建立方法[14],定義狀態(tài)增量與控制增量:
(3)
式中Δxp(k)表示在k時刻狀態(tài)的改變。
再定義增廣狀態(tài)向量:
(4)
建立以xarg(k)為狀態(tài)量、Δup(k)為控制增量的增廣模型:
(5)
式中:
由式(5)可建立如下經(jīng)典形式預(yù)測模型:
Y=Exarg(k)+T1ΔUp
(6)
式中:
其中:Xarg為P維預(yù)測狀態(tài)向量;ΔUp為M維預(yù)測控制向量;P和M為預(yù)測控制的重要參數(shù),即預(yù)測時域長度和控制時域長度。其中M表示未來控制量改變的數(shù)目,可通過增大M來提高控制能力[12],在選擇P時,需要在穩(wěn)定性和動態(tài)快速性之間權(quán)衡。
MPC控制器增益通過最小化目標(biāo)函數(shù)求極值計算得到[13]。所用性能指標(biāo)為:
J(k)=[Rr(k)-Y(k)]TQ[Rr(k)-Y(k)]+ΔUT(k)RΔU(k)
(7)
J中第一項的目標(biāo)是減小跟蹤的誤差,第二項是對控制向量的約束;J極小的物理意義是,當(dāng)系統(tǒng)偏離平衡狀態(tài)時,用盡可能小的控制能量,獲得盡可能好的控制效果和終端精度。上式中的Y、Rr分別為預(yù)測時域內(nèi)的預(yù)測輸出和期望值向量。Q、R為誤差與控制加權(quán)矩陣,Q=diag(qi),R=diag(ri),在一定范圍內(nèi),調(diào)節(jié)Q和R元素的比例可以改變系統(tǒng)穩(wěn)定性和動態(tài)性能,各自的數(shù)值沒有任何意義。
將式(6)代入到預(yù)測控制性能指標(biāo)式(7)中,通過求極值運算獲得最優(yōu)控制量:
(8)
預(yù)測控制是一種以優(yōu)化確定控制策略的算法[14],基于滾動優(yōu)化,只取ΔUp的第一組值施加于被控對象:
(9)
3 仿真結(jié)果與分析
本文對短艙轉(zhuǎn)角βM=50°傾轉(zhuǎn)到βM=90°之間的定翼機(jī)模態(tài)進(jìn)行縱垂向控制。為使控制器不需切換即可應(yīng)用于整個模態(tài),系統(tǒng)魯棒性更佳,選擇中間值βM=60°時設(shè)計。
3.1 短艙角βM =60°的控制
在短艙角βM=60°、空速66 m/s時進(jìn)行配平與線性化,建立預(yù)測模型,設(shè)計內(nèi)、外環(huán)的控制器。在短艙角βM=60°時進(jìn)行仿真驗證,綜合考慮前飛速度、高度響應(yīng)的穩(wěn)定性與動態(tài)性能,選擇外環(huán)控制器預(yù)測時域長度P=250,控制時域M=1,加權(quán)矩陣權(quán)重值qi=5,qd=1,ri=1;內(nèi)環(huán)控制器參數(shù)預(yù)測時域長度P=220,控制時域長度M=3,qi= 0.1,ri=5。期望速度增加5 m/s,期望高度做兩次不同加速度的變換。仿真結(jié)果如圖2所示。
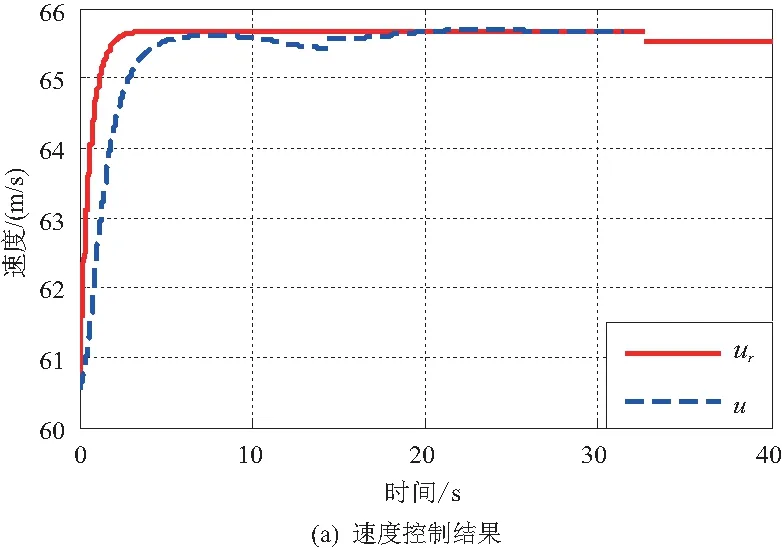


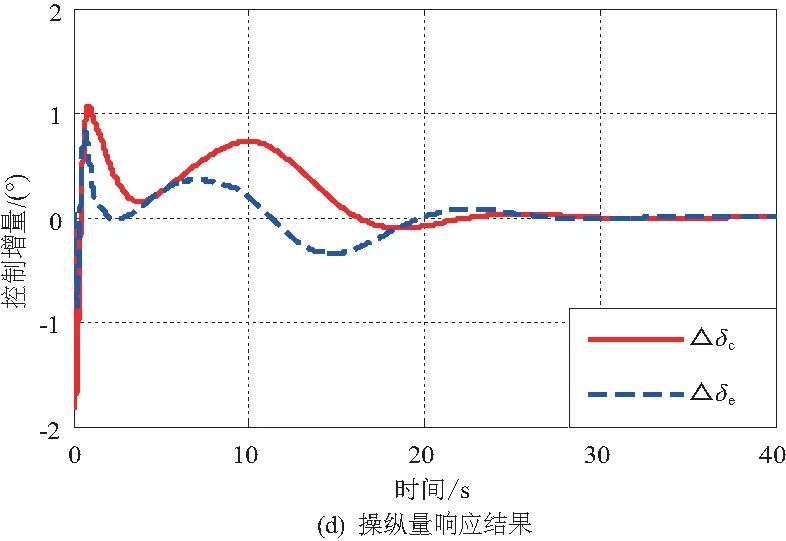
圖2 βM=60°縱垂向控制結(jié)果
高度運動的調(diào)節(jié)時間長,有振蕩但振蕩次數(shù)少、幅度小。定翼機(jī)模態(tài)縱垂向間的運動存在著耦合,所以引起了前飛速度響應(yīng)的輕微振蕩。俯仰力矩的變化引起俯仰角度變化,進(jìn)而使高度改變,同時縱垂向的分力隨之改變,引起耦合運動。Δθ在-1°~5°間變化,操縱控制增量在-2°~1°內(nèi)變化,各增量變化平穩(wěn)。完成了在定翼機(jī)模態(tài)βM=60°時對縱垂向的控制。
3.2 定翼機(jī)模態(tài)控制
將短艙角βM=60°時設(shè)計的控制器應(yīng)用到整個定翼機(jī)模態(tài)。前向加速飛行同時期望高度變化,直至短艙角βM傾轉(zhuǎn)到90°,速度保持在90 m/s。
控制操縱量同配平值很好地重疊,高度因其自身特性在控制結(jié)果中有振蕩,速度與高度沒有穩(wěn)態(tài)誤差,響應(yīng)過程具有良好的平穩(wěn)性,實現(xiàn)控制系統(tǒng)快準(zhǔn)穩(wěn)的要求。仿真結(jié)果表明,設(shè)計的定翼機(jī)模態(tài)預(yù)測控制器能夠在大范圍的飛行條件下表現(xiàn)出色的性能。仿真結(jié)果如圖3所示。
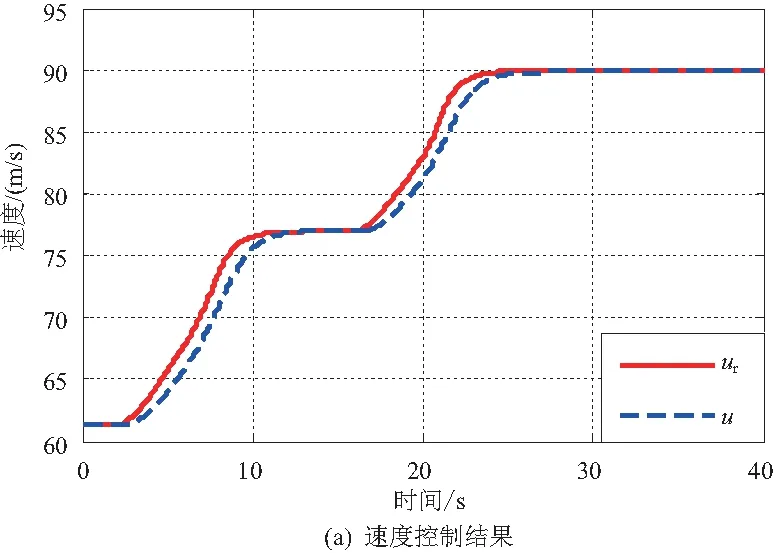
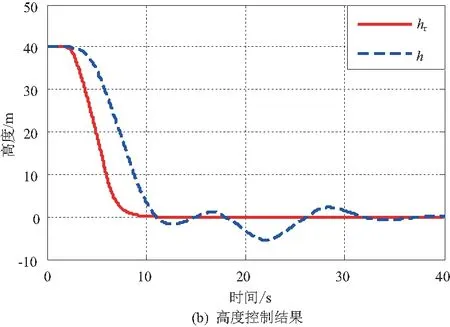

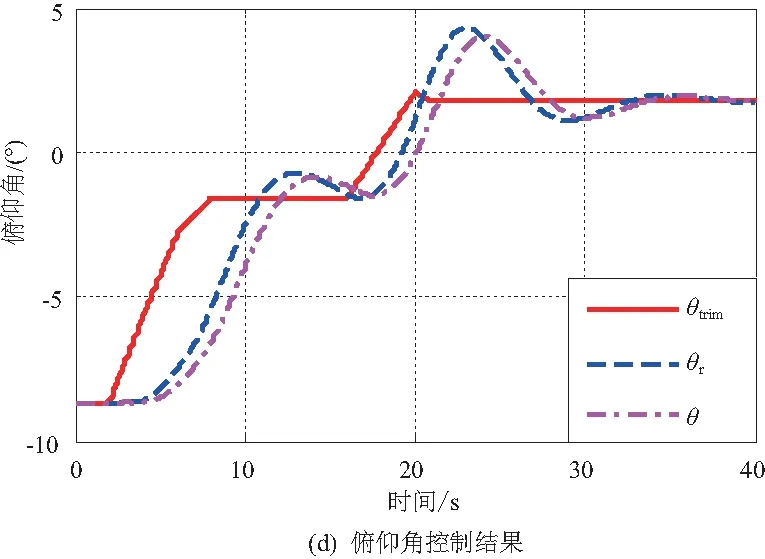
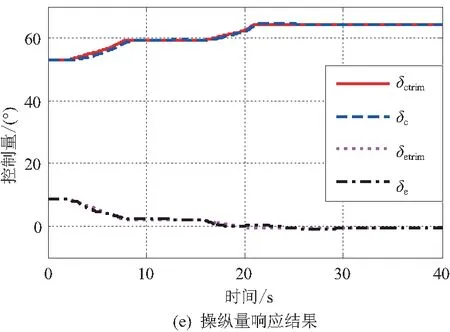
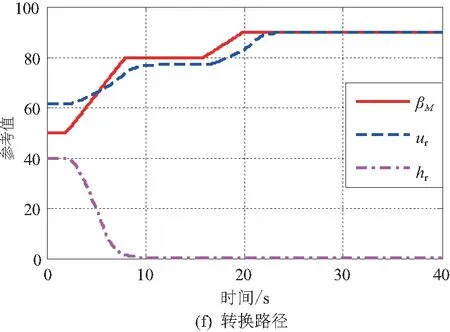
圖3 定翼機(jī)模態(tài)控制結(jié)果
4 結(jié)語
本文為實現(xiàn)定翼機(jī)模態(tài)時對前飛速度與高度的控制,設(shè)計了級聯(lián)形式控制方案;以XV-15數(shù)學(xué)模型為基礎(chǔ),將短艙角60°處經(jīng)配平、線性化建立預(yù)測模型,得到基于狀態(tài)方程的預(yù)測控制器。針對傾轉(zhuǎn)旋翼機(jī)隨短艙傾轉(zhuǎn)的大范圍飛行狀態(tài),本文設(shè)計的控制器具有強(qiáng)魯棒性,可以將短艙角60°處的控制器應(yīng)用于整個定翼機(jī)模態(tài),實現(xiàn)了無切換的定翼機(jī)模態(tài)縱垂向控制,避免了切換控制抖振問題。
未來將繼續(xù)開展過渡段模態(tài)的控制設(shè)計,本文對實現(xiàn)傾轉(zhuǎn)旋翼全模態(tài)的過渡控制具有較好的理論參考意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
航空學(xué)報(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
