500 kV瓷套清掃機械臂的研制
2021-05-21 14:03:06陳昊陳瑋光葉昱媛何嘉弘徐偉倫
機械制造與自動化 2021年2期
關鍵詞:機械
陳昊,陳瑋光,葉昱媛,何嘉弘,徐偉倫
(1. 國網江蘇省電力有限公司檢修分公司,江蘇 南京 211102; 2. 東南大學 電氣工程學院,江蘇 南京 210096)
0 引言
500 kV電網是超高壓電力系統的主動脈,承擔著省級電網電能輸送的重任。隨著我國社會經濟的發展和電網建設的不斷推進,500 kV變電站電氣設備的安全運行水平越來越受人矚目[1-2]。當遇到大霧等不良天氣時,絕緣子表面上附著污穢后容易發生污閃[3],引起保護裝置動作[4-5],進而造成大面積線路停電等現象,嚴重時甚至造成人員傷亡。在此背景下,絕緣子防污閃措施的意義格外凸顯。另一方面,隨著物聯網(IoT)的發展,智能運檢逐漸成為電網技術智能化發展的新興研究方向。瓷套是變電站內絕緣子的主要形式,瓷套清掃是絕緣子防污閃的重要措施[6],近年來已有較多的研究成果[7-9]。文獻[10]研制了一種絕緣子風力清掃環。文獻[11]設計了一種針對帶電清掃機器人的液壓自動調平系統。文獻[12]研制了一種超高壓帶電作業機器人,作為一種新型的絕緣子清掃機械臂應用于現場。文獻[13]設計了一種360°全方位半自動清掃的機械裝置。文獻[14]設計了一種盤形懸式絕緣子手持式氣動清掃裝置,克服了工程應用中清洗存在死角的問題。傳統的清掃方式主要依靠人力進行瓷套表面的擦洗,清洗效率低、難度大,除污質量對人員的依賴性大,清洗質量一致性不高,工作人員安全難以得到保障。而目前已有的一些絕緣子清掃裝置雖然可以有效輔助人工進行絕緣子的清掃,一定程度上提高了清掃的效率和效果,但其本質還是人工去污方式,需要尋找一種更為高效的機械自動擦洗清掃裝置去替代人的工作。
本文研制了一種應用于變電站停電檢修情況下,針對500 kV瓷套的清掃機械臂,該裝置采用開口清掃圓環結構以適應變電站現場復雜的環境,采用變軸長清污刷桿設計以提高清掃的效率,控制系統保證清洗質量的一致性,在南京電網的實踐驗證了機械臂的清掃效果。
1 系統組成
瓷套清掃機械臂主要由移動電動升降平臺、清掃刷頭、絲杠模組、光電開關、操作箱(含控制觸摸屏)和驅動控制箱等6大組件構成。裝置設計方案如圖1所示。
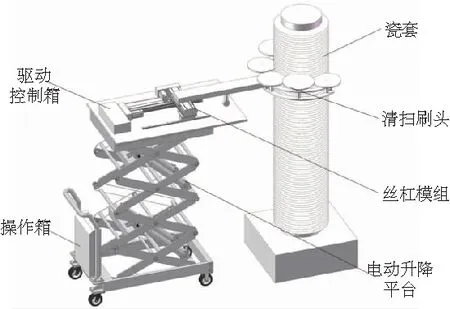
圖1 瓷套清掃機械臂示意圖
1.1 電動升降平臺
電動升降平臺采用剪叉式機械結構,具有較高的穩定性且結構緊湊、運輸狀態尺寸小、承載能力高、高空作業范圍大,并適合搭載多種檢測儀器同時作業。
1.2 操作箱
操作箱安裝于電動升降平臺的移動底座上,包括操作按鈕盒和工業控制觸摸屏。操作按鈕盒操作簡單,可以通過按鈕切換手動和自動控制模式。工業控制觸摸屏適用于調試工程師進行現場參數的配置,調整電動升降平臺的上升速度、下降速度、平臺的上升高度、絲杠模組的移動速度和清掃刷頭電機的工作轉速。
1.3 驅動控制箱
驅動控制箱安裝于電動升降平臺的工作臺上,內部安裝有步進電機驅動器,直流電機驅動器,S7-200 PLC以及相關中繼繼電器。它是整個清掃機械臂工作狀態下的控制核心。
1.4 絲杠模組
絲杠模組和其驅動電機采用平行安裝方式,以減小模組整體體積。上模組安裝位安裝有清掃刷頭,經減速機帶動進行X和Y自由度方向的平移運動,以針對瓷套進行定位調整。
1.5 清掃刷頭
清掃刷頭采用鋁合金定制,刷頭安裝6個清掃電機和3個光電開關定位。清掃機械臂伸出長度為0.9 m,伸長桿中間位置安裝有支撐萬向輪,以減輕清掃機械臂末端由于裝置自重產生的轉矩影響,增強裝置的結構穩定性。
1.6 光電開關
光電開關間隔120°安裝于清掃機械臂的末端圓環上。光電開關感應距離為50 mm,通過相應光電開關定位組的反饋,判斷瓷套所在的位置,進一步對清掃機械臂進行移動調整,使得瓷套位于清掃刷頭開口圓環的中心位置。
2 機構設計
2.1 清掃刷頭設計
清掃刷頭是清掃機械臂的核心。針對500 kV瓷套設計了一種120°圓環開口的清掃刷頭結構,如圖2所示。本文提出的120°圓環開口的清掃刷頭結構具備多角度接近并進行瓷套自動對準定位的功能,在變電站復雜工作環境適應性和現場可操作性兩個維度達到了很好的平衡。
本結構采用中間位置安裝有萬向輪支撐裝置的伸長桿,一方面實現刷頭裝置的伸出,另一方面利用萬向輪支撐提高結構的穩定性,減小刷頭自重所產生的轉矩影響。
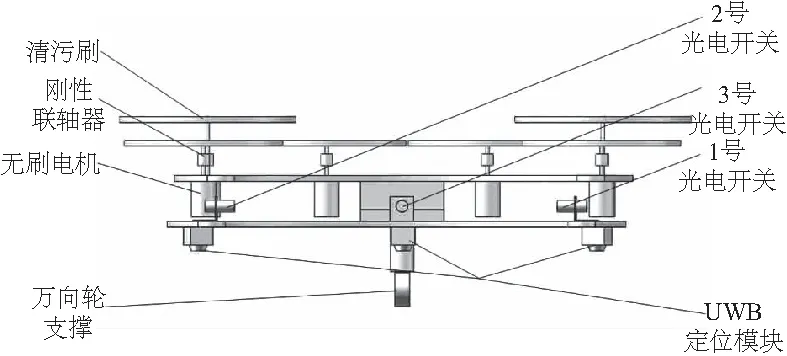
圖2 瓷套清掃刷頭結構圖
直流電機和清污刷之間通過剛性聯軸器連接,具有良好的結構穩定性。由于清污刷刷毛較長,近距離安裝時相鄰清污刷之間難免發生碰擦與干擾,因此本結構采用變軸長清污刷桿,使相鄰清污刷處在不同的工作平面上,有效增加清掃覆蓋面積,提高清掃效率。
2.2 光電開關設計
光電開關是瓷套清掃機械臂的定位核心,其在清掃刷頭圓環上間隔120°安裝,如圖2所示。圓環開口處的1號光電開關和2號光電開關正對安裝,作為一級定位組,實現瓷套的對中,即使瓷套位于圓環開口連線中心。圓環末端與伸長桿連接處安裝2號光電開關,作為二級定位組。當裝置完成一級定位動作,使瓷套位于圓環開口連線中心時,絲杠模組帶動清掃刷頭前進,瓷套進入圓環內部。當末端3號光電開關動作時,說明瓷套已經位于開口圓環的中心位置,即完成了二級定位。
2.3 基于激光測距模塊的同軸定位設計
上節給出的二級定位是一種針對清掃刷頭的平面定位方法。在實際應用中,當瓷套清掃機械臂開始清掃工作時,裝置存在沿瓷套的軸向運動,僅有的瓷套平面定位無法保證在運動過程中瓷套始終處于開口圓環的中心位置。例如,當瓷套本體存在輕微傾斜情況時,很可能在清掃工作持續一段時間后,細微傾斜的影響逐漸顯現,直到發生與瓷套本體發生碰擦,導致機械臂急停。為了保證清掃機械臂在上升與下降的過程避免與瓷套本體發生碰撞的危險,本文在三點式檢測原理的基礎上[15]提出了一種基于激光測距模塊的同軸定位方法,如圖3所示。
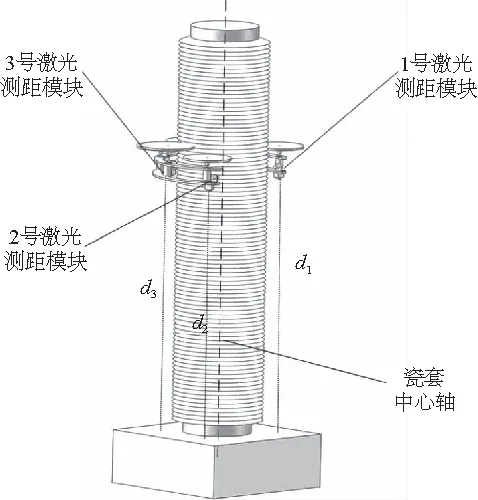
圖3 基于激光測距的同軸定位方法
激光測距模塊安裝于3個光電開關的正下方,編號與對應光電開關保持一致,如圖2和圖3所示。通過測量每個激光測距模塊到瓷套底部固定支柱的距離,判斷清掃刷頭是否與瓷套保持同軸位置。若3個激光測距模塊測量出的距離超出給定的誤差范圍,首先通過其距離差值折算出工作平臺的傾斜角度,然后利用下文提到的同軸調節控制方法,實現瓷套自動清掃裝置整體的調平工作,保證清掃刷頭工作方向與瓷套中心軸方向一致。
3 自動控制系統設計
3.1 基于S7-200 PLC的控制系統設計
圖4是系統原理圖。S7-200 PLC是整個清掃機械臂的控制核心,通過接收傳感器的信號控制清掃機械臂的各執行機構動作。光電開關判斷瓷套所在的位置,PLC接收到信號后,發出高速脈沖控制步進電機驅動器工作,驅動模組步進電機,使絲杠模組調整到合適的位置,光電開關和模組限位開關作為傳感器反饋,判斷目標瓷套所在的位置以及防止裝置碰撞。上位機采用工控觸摸屏與S7-200 PLC通信,進行運動控制和參數設置。
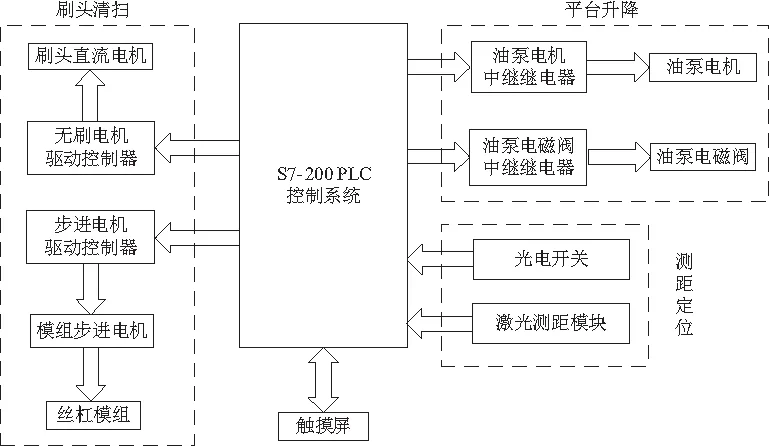
圖4 裝置系統原理圖
3.2 同軸調節控制
為保證電動升降平臺上升下降的過程中,清掃刷頭圓環不會與瓷套發生碰撞,要求裝置工作平臺的傾角在允許的誤差范圍內,當傾角過大時可以自動進行同軸調節。本裝置通過3個激光測距模塊反饋的距離數據計算出工作平臺的傾斜角度,實現實時傾角量反饋控制。
控制策略為門限控制,在清掃工作過程中進行自動的同軸調節。

根據門限控制策略,i時刻的X軸調節速率如式(1)所示。
(1)
門限控制策略實現了對絕對傾角的動態控制,能實現快速響應(1 s以內完成)。
3.3 基于UWB的帶電區域感知技術
變電站內電氣環境復雜,因此在工作人員配合瓷套清掃機械臂進行清掃時,首先要與帶電區域保持足夠的距離,以保護設備安全和人身安全。
本文提出一種基于UWB定位技術的安全距離控制與定位方法。基站在Ta1發射請求性質的脈沖信號,標簽在Tb1時刻收到請求信號,并在Tb2時刻發射一個響應性質的信號,基站在Ta2時刻接收到該響應信號,則基站與標簽之間的距離R可以通過下式進行計算:
R=C×[(Ta2-Ta1)-(Tb2-Tb1)]
(2)
其中C為光速。
機械臂基于移動UWB實現裝置工作區域的小范圍定位,實現了對作業附近帶電區域的隔離,確保清掃工作中設備與人身安全。
3.4 工作流程
裝置的控制分為手動和自動模式。手動模式下采用點動控制方式,通過工控觸摸屏控制絲杠模組的移動、電動升降平臺的升降和刷頭電機的啟動與停止。自動模式下,在完成人工初步定位使裝置到達接近的位置時,可以一鍵實現瓷套的清掃。
自動清掃分為定位和清掃兩個階段。在定位階段,人工將清掃刷頭圓環開口與瓷套初步對準,按下自動清掃按鈕,絲杠模組開始前進運動接近瓷套。當兩者足夠接近時,光電開關動作,前進運動停止,開始進行基于1號光電開關和2號光電開關的一級定位。瓷套一級定位對準完成以后,絲杠模組再次前進,直到清掃圓環末端3號光電開關動作時停止。此時說明目標瓷套已經位于清掃圓環的中心位置,二級定位完成,定位階段結束,工作進入清掃階段。
清掃過程中通過激光測距傳感器實時監控工作平臺的傾斜角度,通過同軸調節控制方法保證上升與下降的過程中清掃刷頭工作方向與瓷套中心軸方向一致,避免碰撞危險。
4 現場試驗
根據500 kV瓷套的結構尺寸確立了清掃機械臂的結構參數,并研制了瓷套清掃機械臂樣機。經過實驗室試驗之后,在南京電網某500 kV設備現場,開展瓷套清掃試驗,試驗環境如圖5所示。
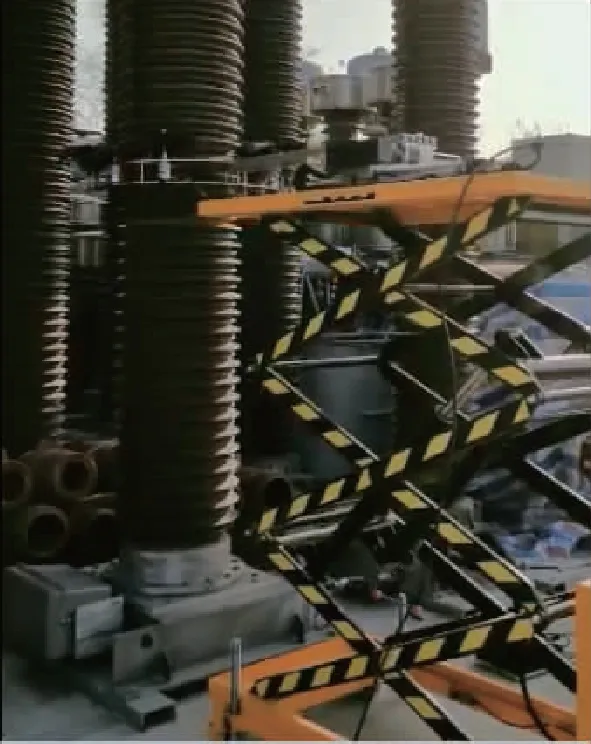
圖5 實驗平臺
電動升降平臺上裝載的清掃刷頭和絲杠模組總重55 kg,可以根據需求安裝與拆卸,具有良好的適配性。清掃刷頭伸長桿長度為0.9 m,保證清掃刷頭有足夠的接近調整距離。在刷頭接近被試CT過程中,自動調平功能可以確保升降平臺水平面始終保持平衡狀態,在1 s中完成調整。
經過現場實驗,考慮到工作人員初步定位的不確定性,清掃刷頭的調整時間為50~95 s,而機械臂一次清掃的總時長僅需20 s,清掃效率相對人工清掃有了極大的提高,整個清掃過程具有良好的平穩性與一致性。此外,試驗過程中,驗證了機械臂對高壓帶電區域感知功能,能有效報警或切斷電源,靈敏度亦達到設計預期。
綜上,試驗結果驗證了清掃機械臂的實用性和穩定性,裝置具有良好的清掃瓷套的能力。
5 結語
本文研制了一種500 kV瓷套清掃機械臂,該機械臂擁有高效的機械結構和靈活的控制系統,在南京電網的實踐表明裝置具有良好的清掃瓷套的能力,為以后的研究提供了重要指導意義。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
