雙饋異步風(fēng)力機(jī)BP神經(jīng)網(wǎng)絡(luò)空載并網(wǎng)控制
2021-05-21 14:03:10王嘉良
機(jī)械制造與自動(dòng)化 2021年2期
關(guān)鍵詞:控制策略發(fā)電機(jī)
王嘉良
(河海大學(xué) 能源與電氣學(xué)院,江蘇 南京 211100 )
0 引言
據(jù)統(tǒng)計(jì),地球上可開發(fā)利用的風(fēng)能大約為2×107MW,從20世紀(jì)初開始,國(guó)際社會(huì)不斷注重風(fēng)力發(fā)電技術(shù)的發(fā)展[1]。隨著近20年的發(fā)展,風(fēng)力發(fā)電系統(tǒng)的單機(jī)容量不斷增大,主流機(jī)型逐漸發(fā)展為兆瓦級(jí)機(jī)組,在并網(wǎng)過程中風(fēng)力發(fā)電機(jī)組的安全問題、對(duì)電網(wǎng)產(chǎn)生的電流沖擊問題以及電能質(zhì)量問題引起研究人員的重視[2]。雙饋異步風(fēng)力發(fā)電系統(tǒng)由于使用的功率變流器較小,降低了成本,而且控制性能較高,因此成為風(fēng)力發(fā)電中的一種主流機(jī)型。雙饋異步風(fēng)力發(fā)電系統(tǒng)主要有空載并網(wǎng)、獨(dú)立負(fù)載并網(wǎng)和孤島并網(wǎng)3種并網(wǎng)方式,其中空載并網(wǎng)由于結(jié)構(gòu)簡(jiǎn)單且控制性能好,因此應(yīng)用最為廣泛[3]。
文獻(xiàn)[4]通過分析交流勵(lì)磁變速恒頻風(fēng)力發(fā)電機(jī)組運(yùn)行特點(diǎn),研究了矢量并網(wǎng)控制技術(shù),提出了基于定子磁鏈定向的空載并網(wǎng)策略,減小了并網(wǎng)時(shí)的沖擊電流,但是對(duì)模型參數(shù)的要求比較高。文獻(xiàn)[5]將電網(wǎng)電壓定向矢量控制應(yīng)用于空載并網(wǎng)策略中,該控制策略將定子磁鏈的檢測(cè)省去,減小了檢測(cè)誤差,降低了電網(wǎng)沖擊。文獻(xiàn)[6]將高階滑模控制應(yīng)用于電網(wǎng)電壓定向的空載并網(wǎng)控制策略,消除控制量中的抖振,增強(qiáng)了魯棒性,更有利于實(shí)現(xiàn)無沖擊電流的快速并網(wǎng)。文獻(xiàn)[7]在雙饋異步發(fā)電機(jī)空載并網(wǎng)模型的基礎(chǔ)上,介紹了一種自并網(wǎng)算法,并通過自主研制的試驗(yàn)平臺(tái)進(jìn)行仿真和試驗(yàn)研究,實(shí)現(xiàn)柔性并網(wǎng)。文獻(xiàn)[8-10]分別利用變結(jié)構(gòu)控制與全狀態(tài)反饋線性化結(jié)合的控制策略[8]、模糊控制[9]和積分滑模控制[10]實(shí)現(xiàn)發(fā)電機(jī)空載并網(wǎng),且在并網(wǎng)后能夠?qū)崿F(xiàn)最大風(fēng)能追蹤以及有功功率與無功功率的解耦控制。文獻(xiàn)[11]采用“空載-并網(wǎng)”兩階段控制的方案,實(shí)現(xiàn)“空載”和“并網(wǎng)”兩個(gè)工作狀態(tài)的平滑轉(zhuǎn)移,并網(wǎng)過程中對(duì)電網(wǎng)電壓的跟蹤能力強(qiáng),沖擊電流小,并網(wǎng)后能夠?qū)崿F(xiàn)功率的解耦控制和最大風(fēng)能追蹤。
本文建立了雙饋異步發(fā)電機(jī)(doubly-fed induction generator, DFIG)同步坐標(biāo)系下的數(shù)學(xué)模型,對(duì)空載并網(wǎng)的原理進(jìn)行分析,通過BP神經(jīng)網(wǎng)絡(luò)調(diào)整PID控制器參數(shù),實(shí)現(xiàn)轉(zhuǎn)子側(cè)電流對(duì)定子側(cè)電壓的有效最優(yōu)控制,并建立仿真模型,通過仿真結(jié)果的對(duì)比,驗(yàn)證了所用控制方法的合理性和有效性。
1 雙饋異步發(fā)電機(jī)空載數(shù)學(xué)模型
1.1 同步坐標(biāo)系下DFIG的數(shù)學(xué)模型:
本文中雙饋異步發(fā)電機(jī)采用電動(dòng)機(jī)慣例。假設(shè)異步發(fā)電機(jī)具有三相平衡對(duì)稱結(jié)構(gòu)、定子和轉(zhuǎn)子鐵芯與鐵損耗為線性關(guān)系,其數(shù)學(xué)模型為:
1)定子側(cè)和轉(zhuǎn)子側(cè)電壓方程分別為:
(1)
式中:vds、vqs、vdr、vqr分別是定子和轉(zhuǎn)子在dq軸上的電壓分量;Rs、Rr分別是定子和轉(zhuǎn)子繞組電阻;ids、iqs、idr、iqr分別為定子和轉(zhuǎn)子在dq軸上的電流分量;ψds、ψqs、ψdr、ψqr分別為定子、轉(zhuǎn)子在dq軸上的磁鏈分量;ωr、ω1分別為轉(zhuǎn)子角速度和同步角速度;p為微分算子,p=d/dt。
2)定子側(cè)和轉(zhuǎn)子側(cè)磁鏈方程分別為:
(2)
式中:Lm為勵(lì)磁電感;Ls、Lr分別為定子漏感和轉(zhuǎn)子漏感。
3)運(yùn)動(dòng)方程為:
(3)
式中:Tm、Te分別為發(fā)電機(jī)機(jī)械轉(zhuǎn)矩、電磁轉(zhuǎn)矩;J為轉(zhuǎn)子轉(zhuǎn)動(dòng)慣量。
4)轉(zhuǎn)矩方程為:
(4)
式中np為發(fā)電機(jī)極對(duì)數(shù)。
1.2 空載并網(wǎng)數(shù)學(xué)模型
當(dāng)雙饋異步風(fēng)力發(fā)電機(jī)定子電壓的幅值、頻率和相位與電網(wǎng)電壓的幅值、頻率以及相位一致時(shí),滿足并網(wǎng)要求,在并網(wǎng)前后通過采用定子磁鏈定向矢量控制策略來實(shí)現(xiàn)控制要求。采用發(fā)電機(jī)定子磁鏈定向,且忽略定子電阻,將定子磁鏈定向在d軸上,則磁鏈方程為:
(5)
由式(5)得定子電流為:
(6)
將式(5)和式(6)代入式(1)得:
(7)
當(dāng)雙饋異步發(fā)電機(jī)在空載運(yùn)行狀態(tài)下時(shí),定子電流為0,即ids=iqs=0,電壓方程和磁鏈方程簡(jiǎn)化為:
(8)
式中ωs=ω1-ωr,為轉(zhuǎn)差角速度。
(9)
由于定子電阻與定子電感相比很小,因此通常可以忽略,在定子磁鏈定向的情況下,磁鏈方程為:
(10)
在雙饋異步風(fēng)力發(fā)電系統(tǒng)的空載并網(wǎng)控制中,電磁轉(zhuǎn)矩為0,不考慮變槳距控制,機(jī)械模塊僅輸入風(fēng)速V。根據(jù)風(fēng)力機(jī)的機(jī)械功率和機(jī)械轉(zhuǎn)矩可得發(fā)電機(jī)的機(jī)械轉(zhuǎn)速[12]:
(11)
式中:ρ為空氣密度;R為風(fēng)輪半徑;Cp為風(fēng)能利用系數(shù);np為發(fā)電機(jī)極對(duì)數(shù)。
2 BP神經(jīng)網(wǎng)絡(luò)PID空載并網(wǎng)控制
BP神經(jīng)網(wǎng)絡(luò)PID控制器由BP神經(jīng)網(wǎng)絡(luò)和經(jīng)典的PID控制構(gòu)成,本文采用3層BP網(wǎng)絡(luò)結(jié)構(gòu)[13],選取Sigmoid函數(shù)為活化函數(shù),被控對(duì)象由PID控制器實(shí)現(xiàn)閉環(huán)控制,PID控制器的3個(gè)參數(shù)Kp、Ki、Kd由BP神經(jīng)網(wǎng)絡(luò)根據(jù)系統(tǒng)的運(yùn)行狀態(tài),通過自學(xué)習(xí)和調(diào)整加權(quán)系數(shù)的方式進(jìn)行在線調(diào)整,實(shí)現(xiàn)在穩(wěn)定狀態(tài)下系統(tǒng)最優(yōu)控制的目的。BP神經(jīng)網(wǎng)絡(luò)PID控制系統(tǒng)結(jié)構(gòu)如圖1所示。
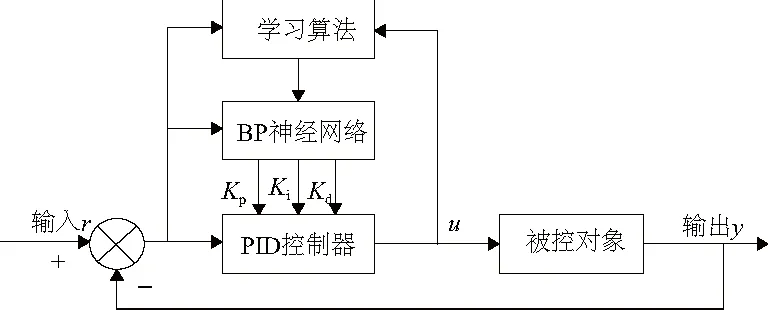
圖1 BP神經(jīng)網(wǎng)絡(luò)PID結(jié)構(gòu)圖


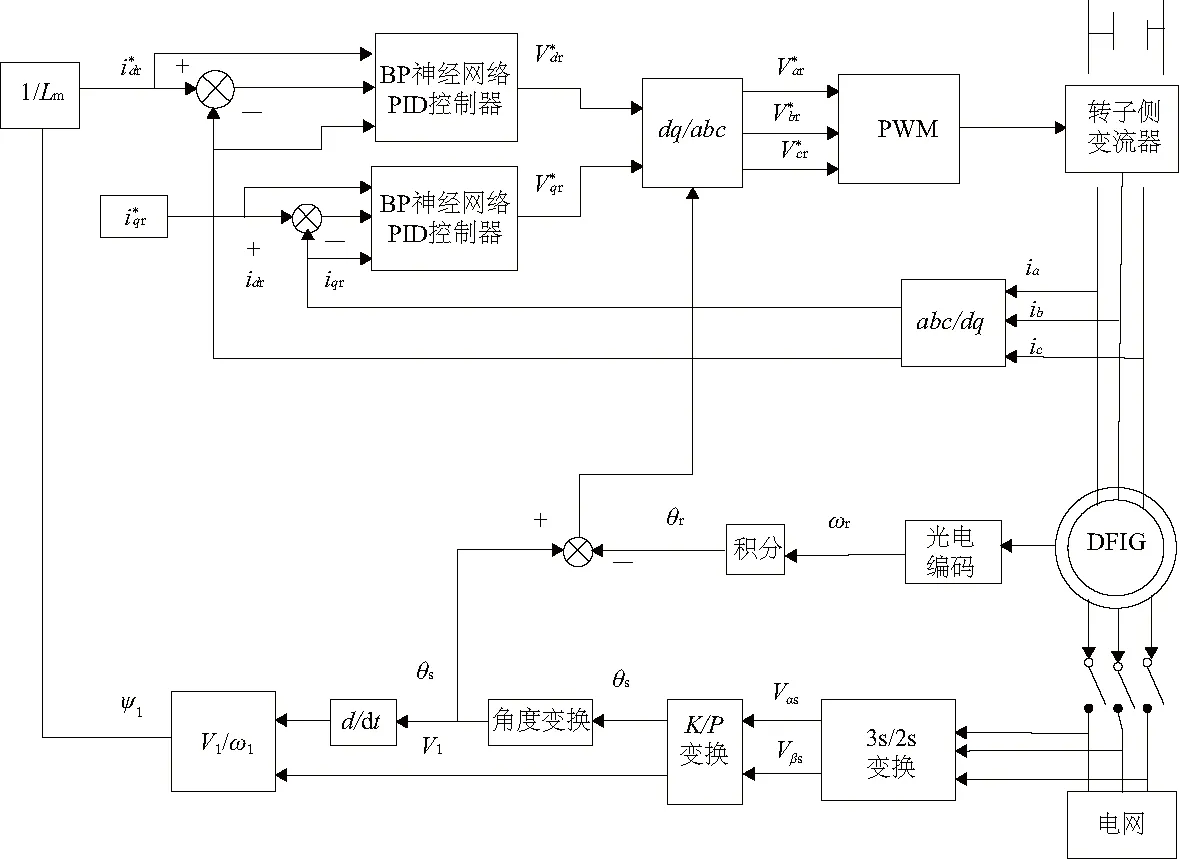
圖2 BP神經(jīng)網(wǎng)絡(luò)PID控制框圖
3 仿真分析
本文在Matlab/Simulink仿真軟件中搭建了雙饋異步發(fā)電機(jī)BP神經(jīng)網(wǎng)絡(luò)PID空載并網(wǎng)仿真模型(圖3),并與普通PID控制進(jìn)行比較分析,以驗(yàn)證本文使用的并網(wǎng)控制策略的有效性。雙饋異步發(fā)電機(jī)的參數(shù)如下:額定功率為1.5 MW,額定電壓為690 V,額定風(fēng)速為12 m/s,輸入風(fēng)速為7 m/s,風(fēng)輪半徑為31 m,空氣密度為1.225 kg/m3,風(fēng)能利用系數(shù)為0.48,發(fā)電機(jī)極對(duì)數(shù)為2,定子電阻為2.65 MΩ,定子漏感為0.168 7 MH,轉(zhuǎn)子電阻為2.63 MΩ,轉(zhuǎn)子漏感為0.133 7 MH,勵(lì)磁電感為5.474 9 MH。
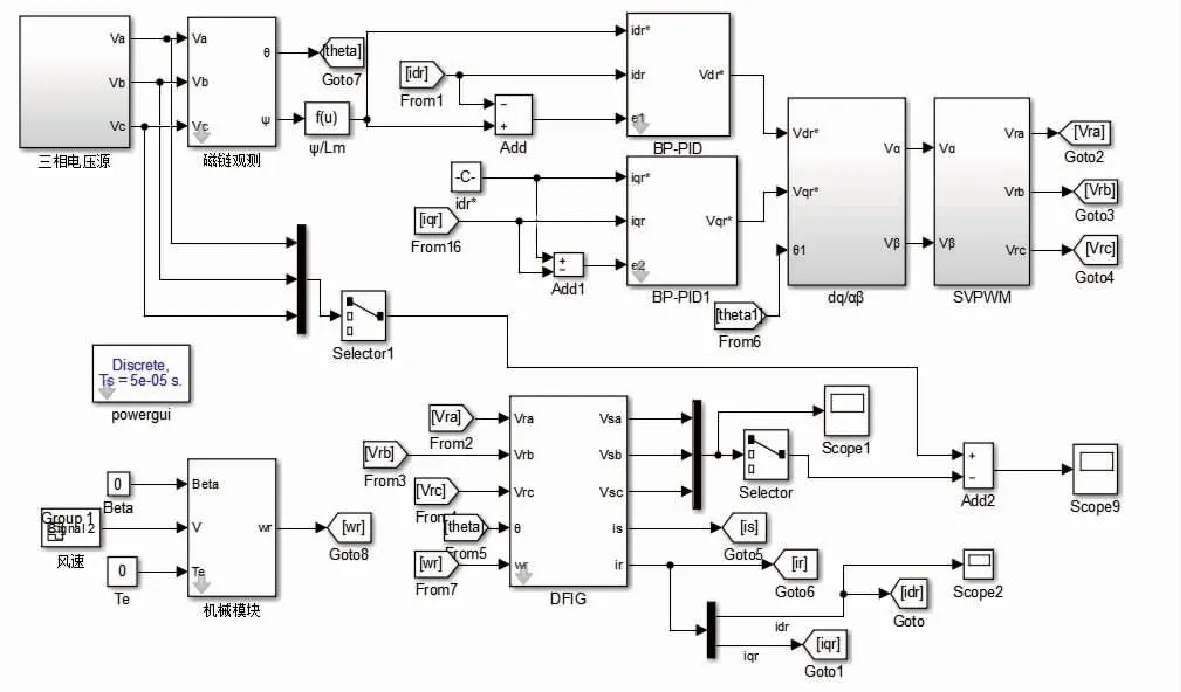
圖3 BP神經(jīng)網(wǎng)絡(luò)空載仿真
在理想狀態(tài)下,對(duì)雙饋異步發(fā)電機(jī)進(jìn)行仿真模擬。圖4為電網(wǎng)電壓曲線圖,圖5為BP神經(jīng)網(wǎng)絡(luò)PID控制策略下定子側(cè)電壓曲線圖,圖6為普通PID控制策略下定子側(cè)電壓曲線圖,圖7為兩種控制策略下電壓誤差曲線圖,圖8為兩種控制策略下轉(zhuǎn)子電流d軸分量曲線圖,圖9為電網(wǎng)發(fā)生短暫波動(dòng)時(shí)的電壓曲線,圖10為電壓波動(dòng)狀況下的電壓誤差曲線圖。
圖4-圖6是在空載運(yùn)行狀態(tài)下,兩種控制方式下電網(wǎng)電壓和定子側(cè)電壓的仿真曲線圖。從圖5-圖6可見,定子側(cè)電壓從波動(dòng)狀態(tài)快速變換到與電網(wǎng)電壓的幅值、頻率和相位一致的穩(wěn)定狀態(tài),達(dá)到并網(wǎng)要求。
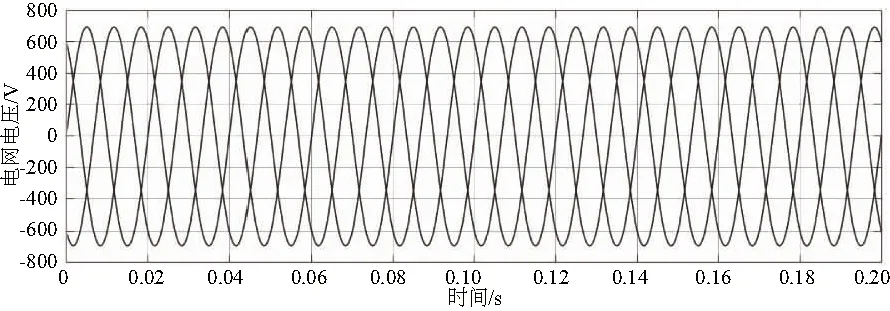
圖4 電網(wǎng)電壓曲線
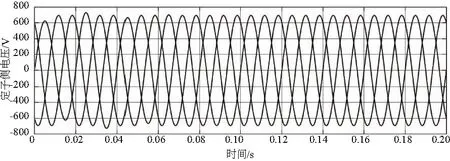
圖5 BP神經(jīng)網(wǎng)絡(luò)PID控制定子側(cè)電壓曲線
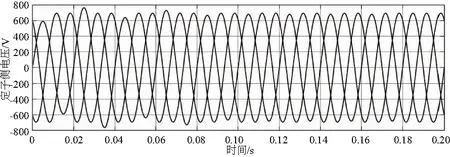
圖6 PID控制定子側(cè)電壓曲線
圖7為BP神經(jīng)網(wǎng)絡(luò)PID控制與普通PID控制空載并網(wǎng)時(shí)發(fā)電機(jī)定子電壓與電網(wǎng)電壓誤差的輸出曲線,由圖可見BP神經(jīng)網(wǎng)絡(luò)PID控制策略的電壓誤差更小,電壓波動(dòng)的時(shí)間更短,達(dá)到并網(wǎng)要求的速度更快。在0.08 s時(shí),電壓誤差值為0,此時(shí)滿足并網(wǎng)要求,完成并網(wǎng)。
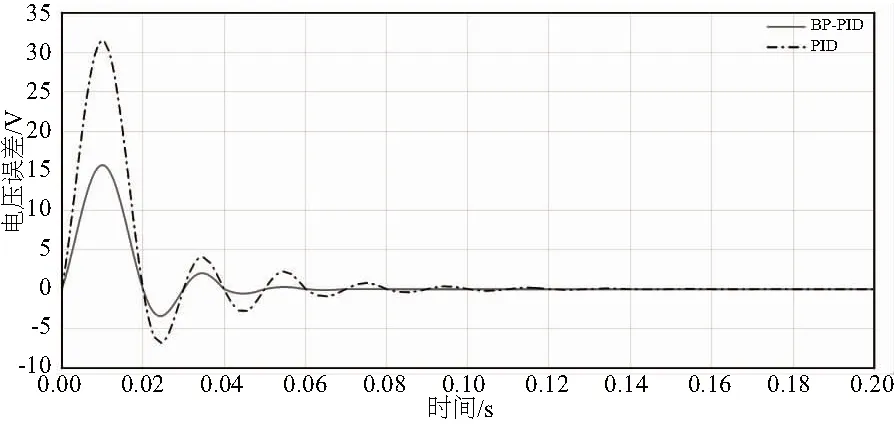
圖7 電壓誤差曲線
圖8為兩種控制策略的轉(zhuǎn)子電流d軸分量的曲線圖。在BP神經(jīng)網(wǎng)絡(luò)PID控制策略中,轉(zhuǎn)子電流在0.08 s時(shí)達(dá)到穩(wěn)定狀態(tài),普通PID控制策略在0.18 s時(shí)達(dá)到穩(wěn)定狀態(tài);在滿足空載并網(wǎng)要求的基礎(chǔ)上,BP神經(jīng)網(wǎng)絡(luò)PID控制的效果明顯優(yōu)于普通PID控制,電壓波動(dòng)更小,較短的時(shí)間即可達(dá)到穩(wěn)定狀態(tài),提高了系統(tǒng)的控制效率。
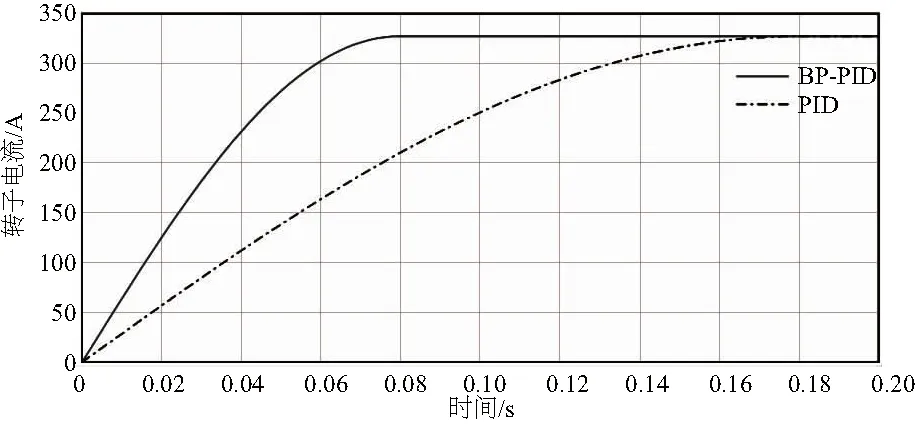
圖8 轉(zhuǎn)子電流曲線
電網(wǎng)電壓發(fā)生如圖9所示的短暫波動(dòng),圖10表示了兩種控制策略的電壓誤差曲線,從誤差曲線圖可知,BP神經(jīng)網(wǎng)絡(luò)PID控制策略在電網(wǎng)波動(dòng)情況下對(duì)電網(wǎng)電壓的追蹤效果仍然良好,精度更高;而普通PID控制策略對(duì)電網(wǎng)電壓的跟蹤效果較差,電壓誤差波動(dòng)較大,達(dá)到穩(wěn)定狀態(tài)的時(shí)間更長(zhǎng)。
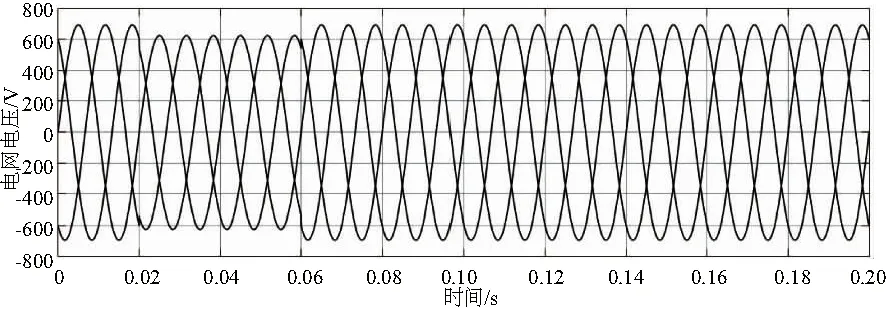
圖9 短暫波動(dòng)時(shí)的電網(wǎng)電壓曲線
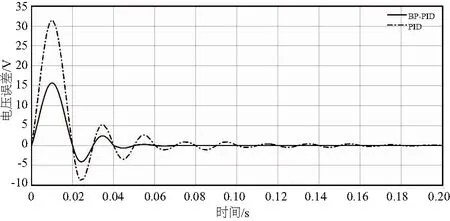
圖10 電壓波動(dòng)狀況下的電壓誤差曲線
4 結(jié)語(yǔ)
本文在雙饋異步發(fā)電機(jī)空載并網(wǎng)的基礎(chǔ)上,利用BP神經(jīng)網(wǎng)絡(luò)調(diào)節(jié)PID控制器的參數(shù),構(gòu)建了BP神經(jīng)網(wǎng)絡(luò)PID空載并網(wǎng)控制。研究表明,在該控制策略下,定子電壓對(duì)電網(wǎng)電壓的追蹤效果較好,電壓誤差快速趨近于0,控制效果相比普通PID控制更優(yōu),是一種優(yōu)良的并網(wǎng)控制策略。
猜你喜歡
故事作文·高年級(jí)(2021年12期)2021-12-21 02:32:35
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
電測(cè)與儀表(2014年17期)2014-04-04 11:56:50
