雙繞組無軸承磁通切換電機轉子徑向懸浮滑模控制研究
2021-05-23 11:38:04周揚忠黃政凱
微特電機 2021年4期
關鍵詞:控制策略
張 競,周揚忠,黃政凱
(福州大學 福建省新能源發電與電能變換重點實驗室,福州350108)
0 引 言
無軸承電機是依據磁軸承和傳統交流電機結構的相似性,將無軸承技術和電機相結合的一種新型電機,因其具有無機械接觸、易實現更高的轉速與更大的功率密度等特點,在航空航天、儀器儀表、生物醫藥、化學化工等行業有廣闊的發展前景[1?2]。
雙繞組無軸承磁通切換電機(以下簡稱BF?SPMM)是無軸承電機的一種,其既具有無軸承電機無機械接觸、無磨損、無需潤滑的特點,又具有磁通切換電機轉子無永磁體、空載反電動勢正弦度高、轉矩密度高等特點[3]。
目前,關于BFSPMM的研究絕大多數集中在電機本體上,而對BFSPMM驅動控制策略研究較少,尤其是轉子徑向懸浮控制策略。文獻[4]提出了一種兩段隔離轉子的新型無軸承電機,轉子所受懸浮力的大小和方向分別通過懸浮電流的幅值和相位來控制,并進行了實驗驗證。文獻[5]通過對電機磁路模型的簡化,推導了懸浮力的數學模型,并將轉子位置劃分為6個區間,分別制定不同的控制策略,實現電機懸浮控制。
在已有文獻中,轉子懸浮控制系統通常利用徑向位移閉環控制中的PI控制器來產生徑向懸浮力給定。雖然PI控制器結構簡單、工作可靠,但其受電機參數影響大、抗干擾能力差,且這種控制方法建立在轉子無偏心情況下,實際運行中轉子會發生偏心,且電機存在模型不精確的情況。針對這些問題,本文基于滑模變結構控制思想[6?7],提出構建徑向懸浮滑模控制器來代替現有徑向位移閉環控制中的PI控制器的控制方法,實現轉子徑向懸浮快速穩定控制。
1 雙繞組BFSPMM結構及懸浮原理
1.1 雙繞組BFSPMM結構
雙繞組BFSPMM橫截面及繞組連接示意圖如圖1所示。其轉子為凸極鐵心結構,共有10個齒,轉子上無永磁體和繞組。定子由12個“U”形鐵心構成,定子上還有mA,mB,mC三相功率繞組和sa,sb,sc三相懸浮繞組,每相功率繞組和每相懸浮繞組均由4個線圈按照圖1中的連接方式串聯構成;imA,imB,imC為三相功率繞組電流,功率繞組中通入電流產生切向電磁轉矩;isa,isb,isc為三相懸浮繞組電流,懸浮繞組中通入電流后產生的磁場會打破原有磁場的對稱性,從而產生徑向懸浮力。
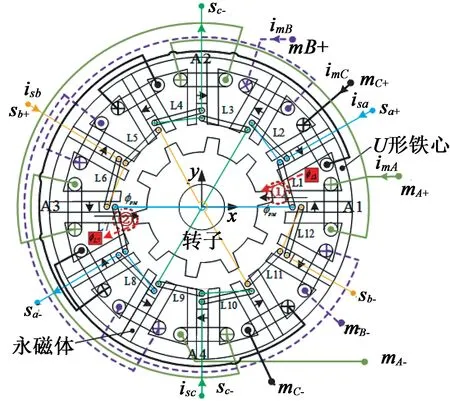
圖1 雙繞組BFSPMM橫截面及繞組連接示意圖
1.2 懸浮原理
如圖1所示,定義與功率繞組線圈A1、A3同軸線的水平軸為x軸,超前x軸90°的豎直軸為y軸,圖1中所標電流方向為正方向,氣隙①、②處所標箭頭為空載情況下永磁磁通φPM方向。根據文獻[8]研究結果表明,在懸浮繞組中通入合適的電流即可產生轉子徑向懸浮所需要的懸浮力,實現轉子徑向懸浮。三相懸浮繞組通入電流產生的懸浮力可用矢量圖表示,如圖2所示。
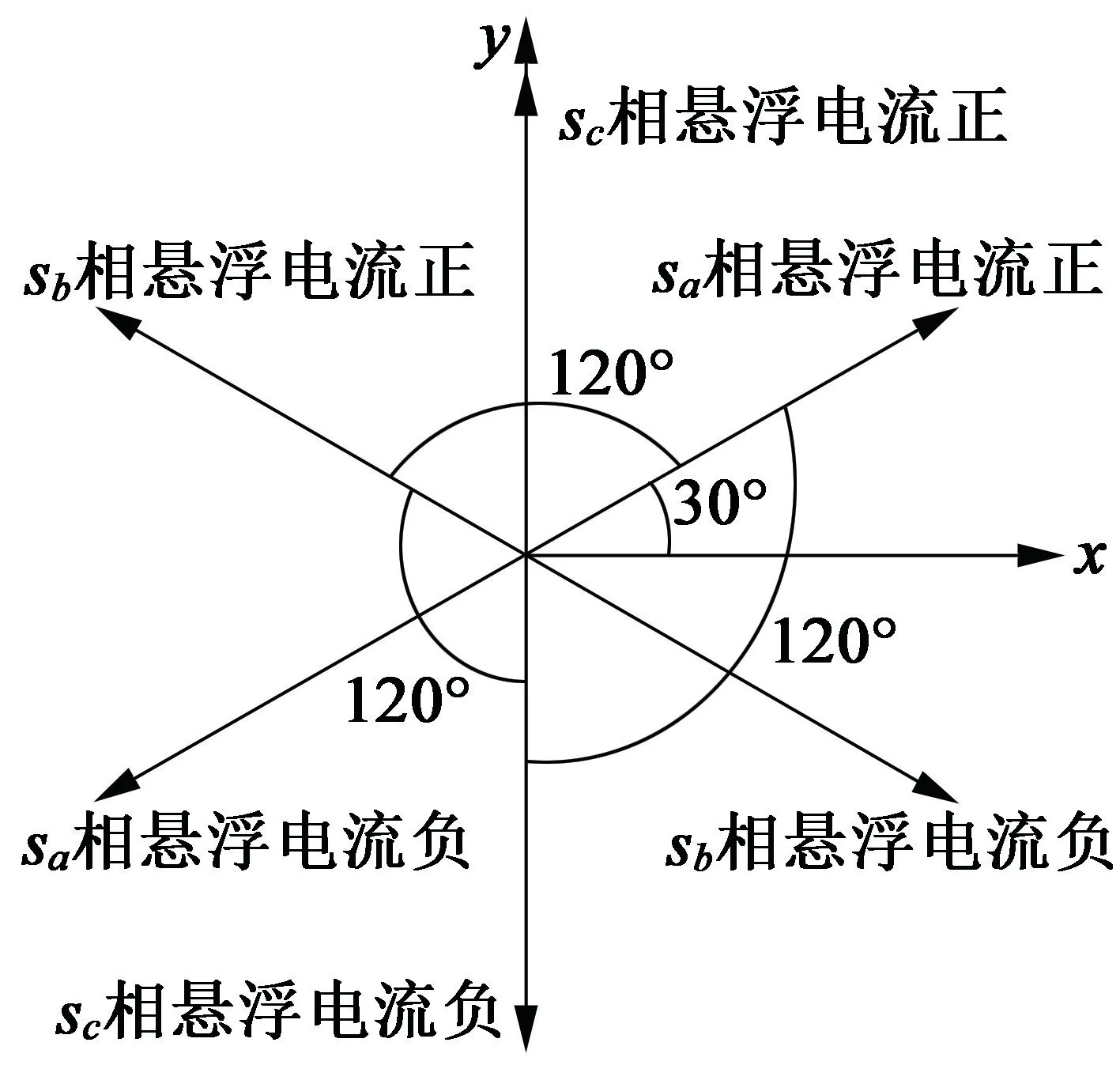
圖2 懸浮繞組電流與懸浮力關系
1.3 數學模型
1.3.1 坐標系定義
BFSPMM的坐標系定義如圖3所示。
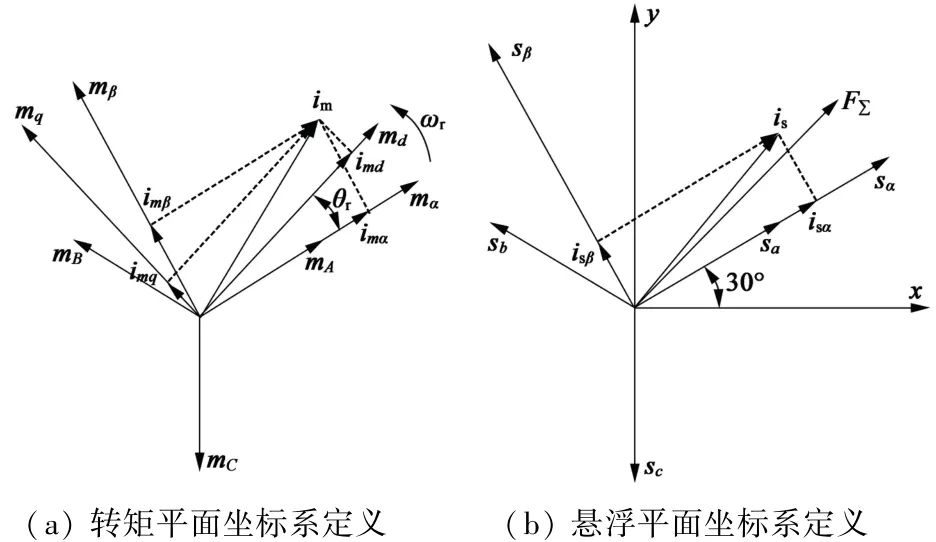
圖3 坐標系定義
圖3(a)為轉矩平面坐標系定義。mα,mβ為兩相靜止坐標系,mα與mA的軸線重合;md,mq為同步旋轉坐標系;mA,mB,mC為三相功率繞組軸線,imA,imB,imC為三相功率繞組電流,通過對三相功率繞組電流進行矢量合成得到功率繞組的電流矢量im;im在mα,m坐標β軸上的投影分別為imα,imβ,im在md,mq坐標軸的投影分別為imd,imq。md與mα夾角為θr,ωr為轉子旋轉電角速度。
圖3(b)為懸浮平面坐標系定義。x,y為水平-垂直直角坐標系,其中x,y軸的方向已在圖1中給出。sa,sb,sc為三相懸浮繞組軸線,isa,isb,isc為三相懸浮繞組電流,懸浮繞組的電流矢量is由isa,isb,isc矢量合成得到;sα,sβ為兩相靜止坐標系,sα與sa的軸線重合;x,y坐標系滯后sα,sβ坐標系30°;is在sα,sβ軸上投影分別為isα,isβ;懸浮繞組電流矢量is產生的懸浮力為F∑。
1.3.2 懸浮力數學模型
實際運行過程中,BFSPMM轉子會發生動態偏心,造成氣隙磁路不對稱,從而引起繞組電感、繞組耦合的永磁磁鏈發生改變。本文通過有限元方法,對偏心情況下的繞組電感、繞組耦合的永磁磁鏈進行分析。圖4為轉子偏心示意圖,以水平向右的方向為直角坐標系x軸的正方向,以垂直向上的方向為直角坐標系y軸的正方向建立平面直角坐標系。轉子的圓心由原來的O點偏移至點O′,點O′坐標為(x,y),總的偏移量e可表示:e=(x2+y2)1/2;偏心角度φ=tan-1(y/x)。

圖4 轉子偏心示意圖
通過有限元分析,轉子偏心情況下僅功率繞組與懸浮繞組間的互電感Mms以及永磁體匝鏈到懸浮繞組中的磁鏈ψfm與轉子偏心位移有關,則有:
式中:Mmm為功率繞組電感;Mss為懸浮繞組電感;ψfm為功率繞組耦合的永磁體磁鏈。
根據虛位移原理,轉子所受的徑向懸浮力等于磁共能Wm對徑向位移的偏導數,即徑向懸浮力Fx,Fy可表示:

利用有限元分析結果以及對繞組電流進行坐標變換,對式(2)、式(3)進一步推導得到懸浮力表達式:
電磁轉矩Te的表達式[8]:
式中:pr為電機極對數。
2 BFSPMM懸浮運行控制策略
2.1 BFSPMM的轉子動力學模型
本文所用BFSPMM為兩自由度結構(2?DOF),轉軸一端固定而一端實現自由懸浮。但是,在實際電機工作中,特別在轉子高速旋轉下,在轉子上施加徑向力時需要考慮到徑向兩個軸之間由于陀螺效應引起的耦合,及實際電機由于偏心旋轉帶來的離心力。
圖5為實際工作過程中的轉子狀態,定義靜止坐標系x,y,z及轉子同步旋轉坐標系i,j,k,其中k軸與轉子旋轉軸重合,轉子底部由調心軸承固定。定義轉子繞i,j,k三個軸旋轉的轉動慣量Ii,Ij,Ik。由于轉子結構對稱,故Ii=Ij。
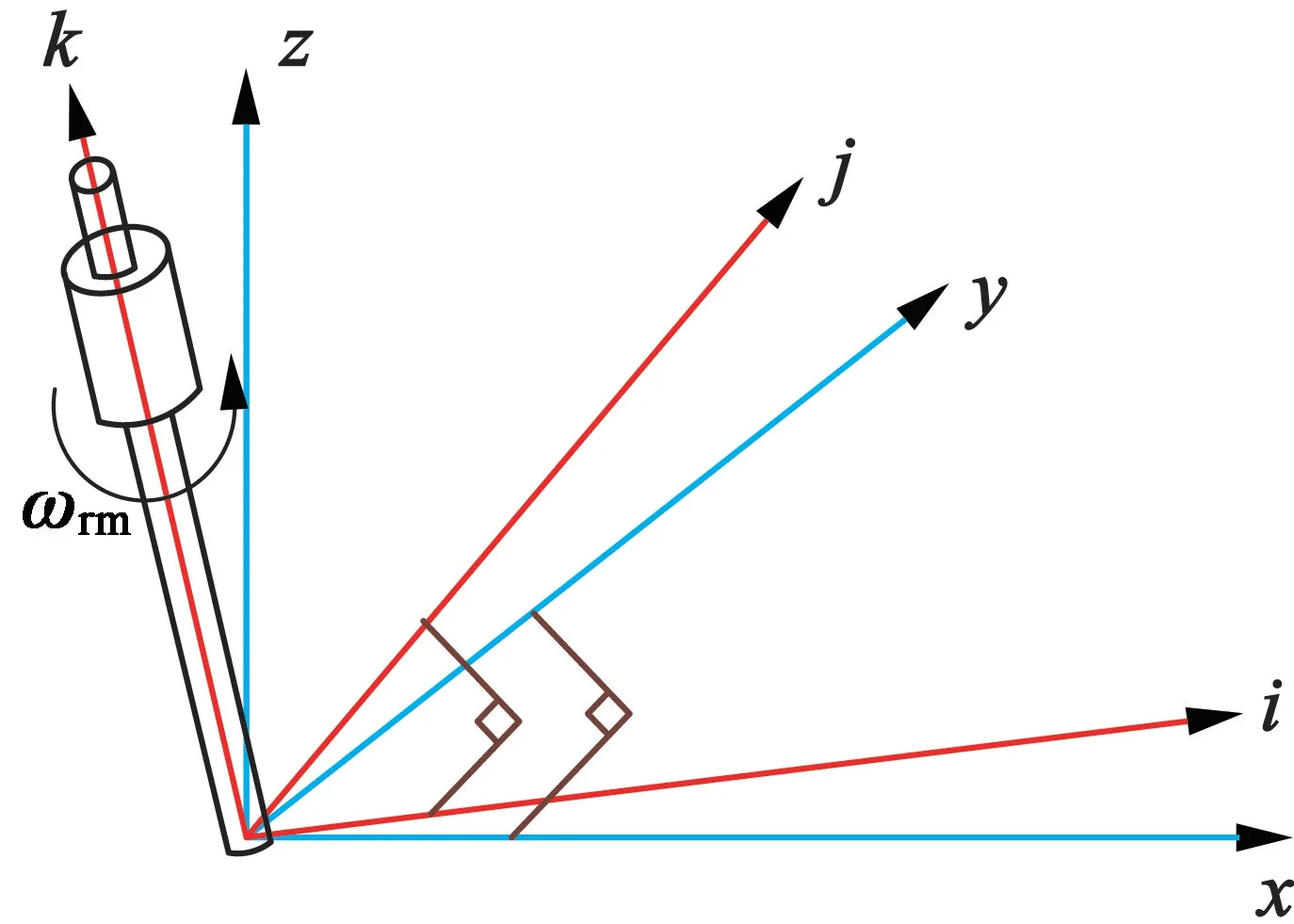
圖5 實際工作過程中轉子狀態
參考文獻[9?10]中提出的磁軸承轉子動力學方程,推出BFPSMM的轉子動力學方程:
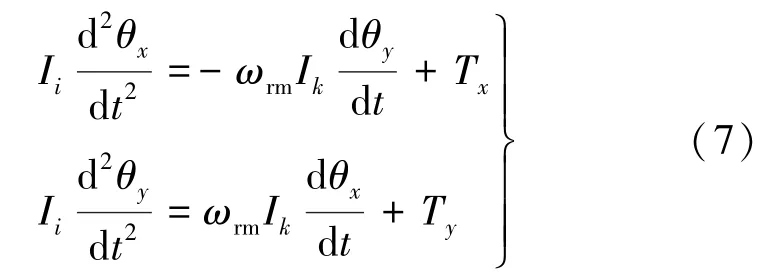
式中:Tx及Ty為轉子受到的力矩;θx,θy為轉軸與x,y軸的夾角;ωrm為轉子轉速。在BFSPMM中,轉子受到的力矩主要由三部分組成,分別為偏心下由重力產生的力矩(垂直放置)、偏心時轉子受到的單邊磁拉力矩以及由懸浮電流產生的懸浮力力矩。
1)偏心轉子受到的重力矩:
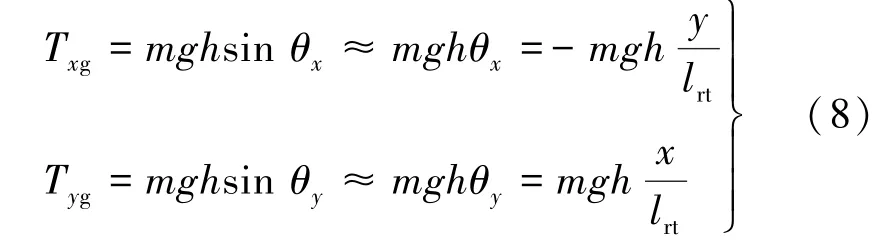
式中:h為轉軸質心的高度;lrt為轉軸的長度;x和y為轉子徑向偏移量。
2)單邊磁拉力力矩:
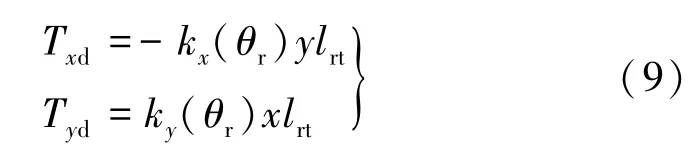
式中:kx(θr)和ky(θr)是x,y方向上的單邊磁拉力系數。在BFSPMM中,轉子在偏心時的單邊磁拉力不相等,且與轉子位置角θr相關。
3)懸浮力力矩:

式中:Fx和Fy分別為轉子上在x,y方向上產生的懸浮力。
結合式(7)~式(10)可得本文的雙繞組BF?SPMM在豎置狀態下的轉子動力學模型:
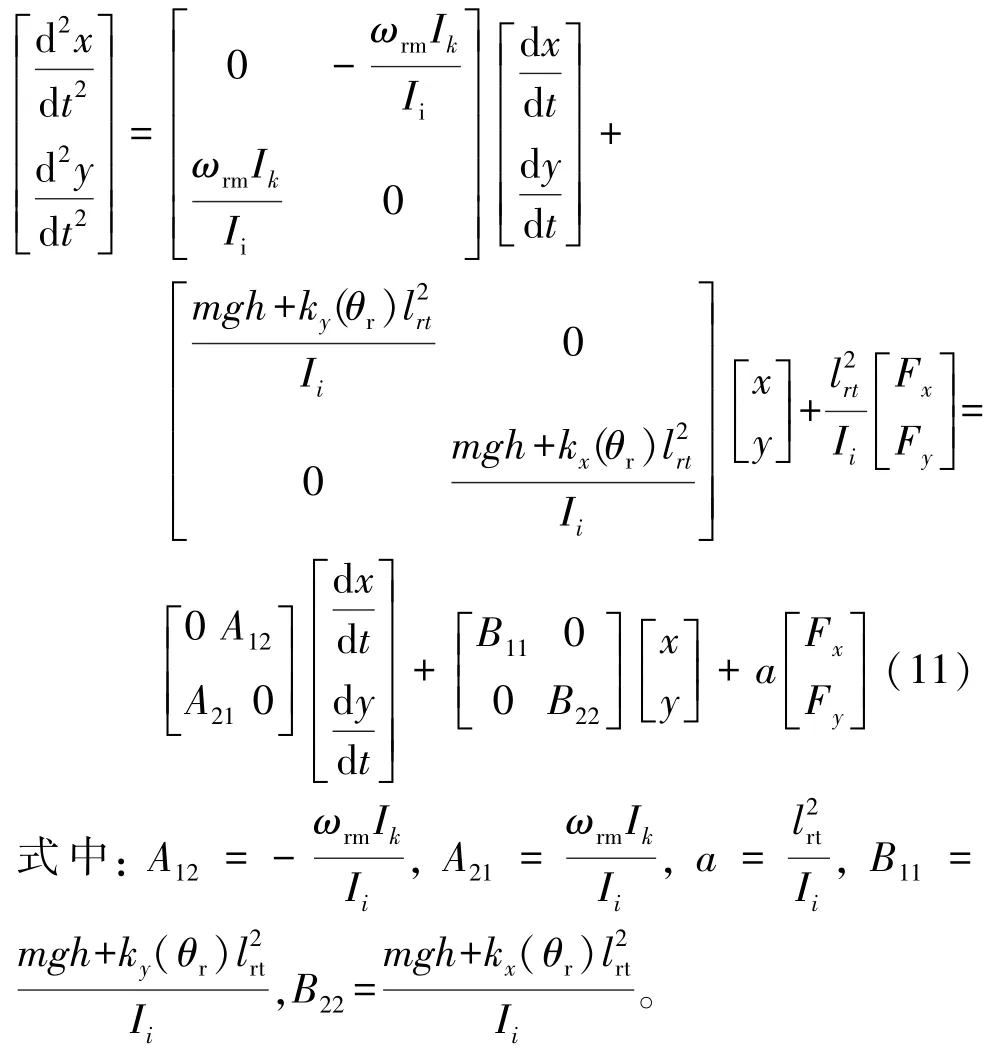
2.2 滑模變結構控制策略
BFSPMM是一個多變量、強耦合的非線性系統,其控制方法的有效性直接關系到電機的工作性能。為了提高徑向懸浮控制的穩定性、抗干擾能力,本文根據轉子動力學模型及懸浮系統狀態變量,得到徑向懸浮系統狀態方程,在徑向懸浮系統狀態方程的基礎上,基于滑模變結構控制思想,設計徑向懸浮滑模控制器,控制器的輸入為實際測得位移信號x,y與給定的位移信號x?=0,y?=0的偏差ex,ey,輸出為徑向懸浮力給定
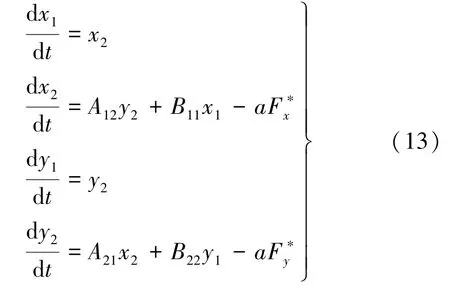
徑向懸浮系統的狀態變量定義如下:

式中:ex,ey為轉子徑向位移誤差。
結合轉子動力學模型式(11)以及懸浮系統狀態變量,得到徑向懸浮系統狀態方程:
根據滑模控制器的輸入,選取滑模切換面函數:
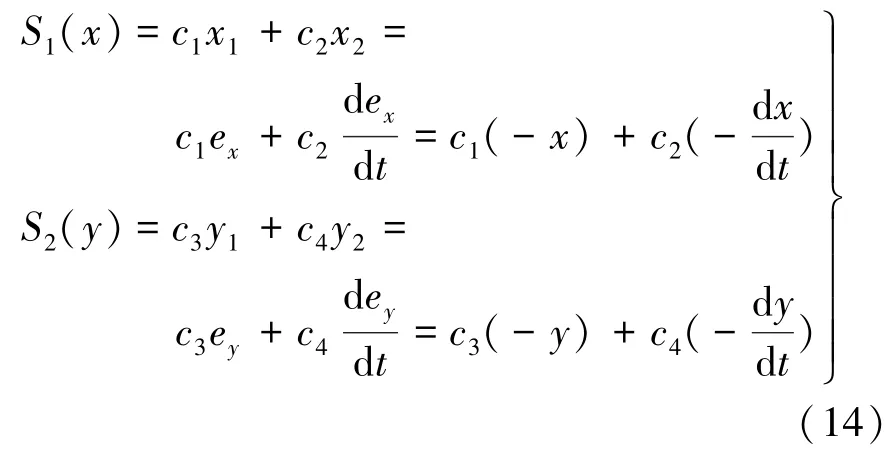
式中:c1,c2,c3,c4為常數,且都大于0。
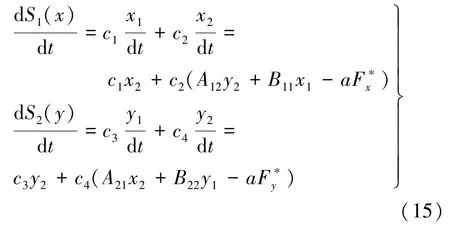
結合式(13),對選取的切換面函數求導,得:
為了保證系統良好的動態性能和減小抖振,在設計控制器的過程中還需要采用趨近律[11],趨近律表達式如下:
通過調節趨近律的參數ε和k,既可以保證滑動模態到達過程的動態性能,又可以減小系統的抖振。
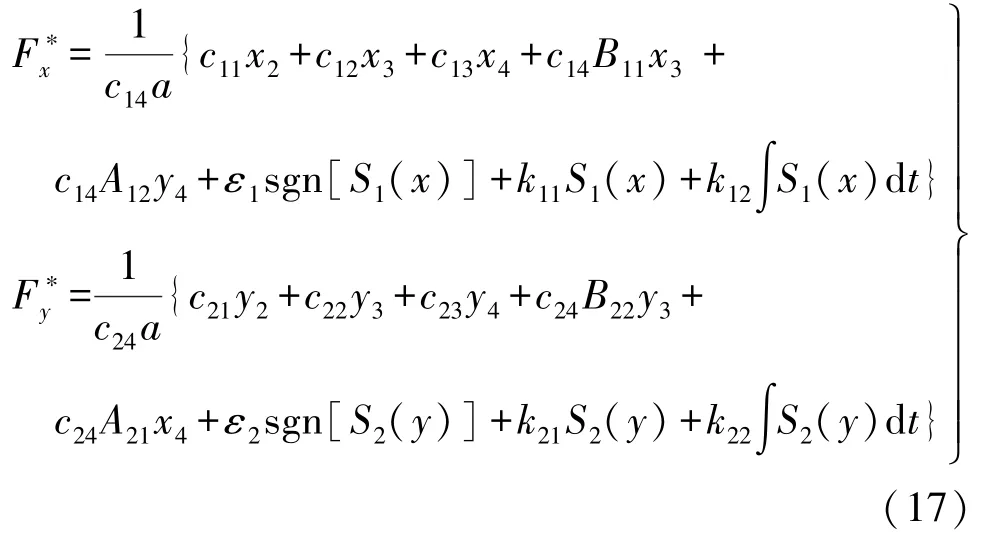
再結合式(15)與式(16),得到x軸、y軸懸浮力給定
由式(19)可知,若取ε1>0,k1>0,ε2>0,k2>0,則:
下面運用Lyapunov穩定性定理證明徑向懸浮滑模控制器的穩定性。
選取Lyapunov函數:
所以,設計的滑模控制器在Lyapunov函數下是漸近穩定的。
2.3 BFSPMM系統控制框圖
基于上述理論分析,構建整個雙繞組BFSPMM系統控制框圖如圖6所示。通過轉子徑向位移傳感器檢測轉子徑向位移實際值x,y,將轉子徑向位移給定值x?,y?與轉子徑向位移實際值x,y進行誤差計算,得到轉子徑向位移誤差ex,ey;將轉子徑向位移誤差ex,ey送入徑向懸浮滑模控制器,得到徑向懸浮力給定值再根據懸浮平面坐標系的定
對其求導可得:義,利用sα,sβ坐標系超前xy坐標系30°,將進行坐標變換得到利用2/3變換,將進行坐標變換得到三相懸浮繞組電流給定再將和isa,isb,isc送給電流滯環比較環節,輸出控制三相逆變橋臂控制信號,實現轉子徑向懸浮。功率繞組采用矢量控制策略,實現轉子切向旋轉控制。
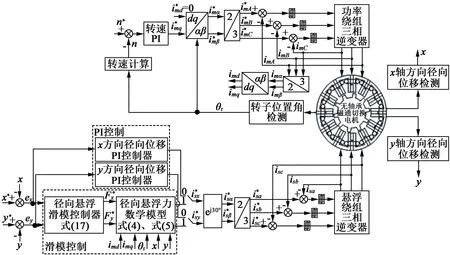
圖6 雙繞組BFSPMM系統控制框圖
3 仿真研究
根據圖6在MATLAB/Simulink中搭建雙繞組BFSPMM控制系統的仿真模型,電機參數如表1所示。
為了驗證本文控制策略的有效性,對采用滑模變結構控制策略和采用傳統PI控制策略的徑向懸浮系統進行仿真對照。電機給定轉速為1 500 r/min,切向負載5 N·m,x方向帶100 N徑向負載,0.5 s時x方向帶載由100 N突卸至0。仿真結果如圖7、圖8所示。
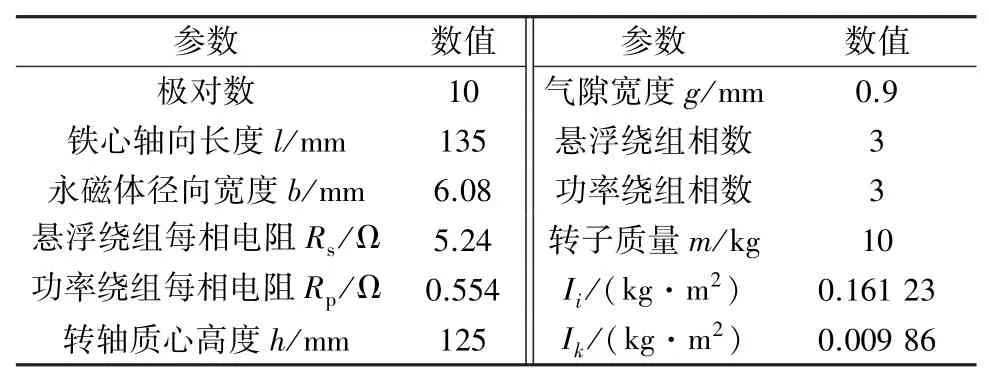
表1 電機參數

圖7 采用滑模控制策略的仿真結果波形
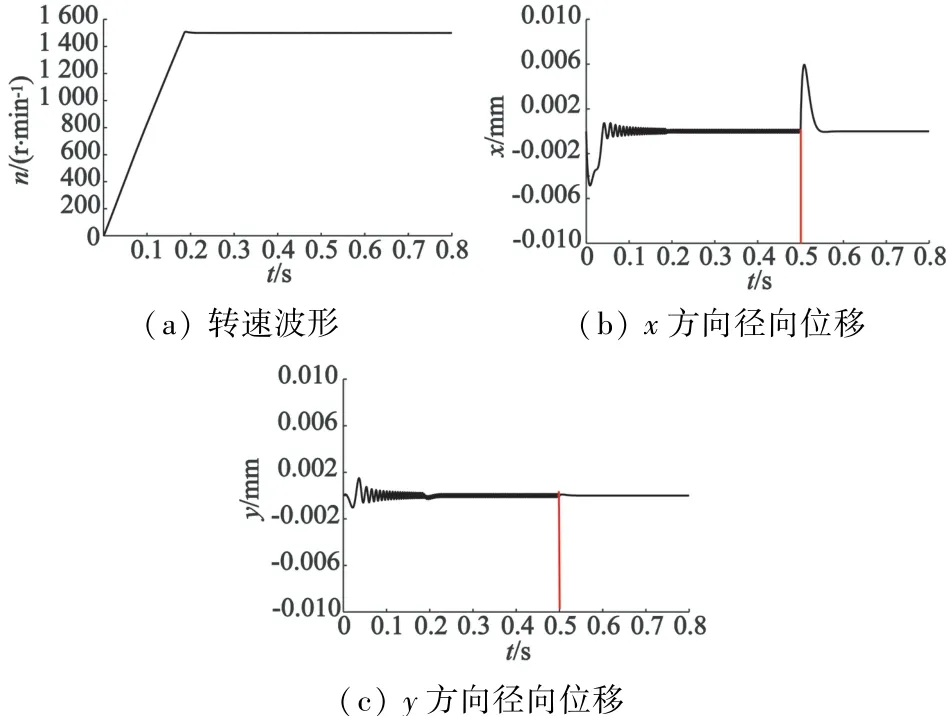
圖8 采用PI控制策略的仿真結果波形
圖7為采用滑模控制策略的仿真結果波形,圖8為采用PI控制策略的仿真結果波形。從圖7與圖8的控制對比仿真結果可見:
(1)在起動過程中,滑模控制系統x,y方向徑向位移脈動很快控制為0,但PI控制系統x,y方向徑向位移脈動需要長達0.2 s才收斂到0附近,表明滑模控制系統切向旋轉與徑向懸浮之間解耦性能更好;
(2)0.5 s時突卸徑向負載,滑模控制系統x方向徑向位移超調基本為0,而PI控制系統x方向徑向位移超調了0.006 mm,表明滑模控制系統徑向位移控制特性更硬;
(3)徑向負載越大,PI控制系統徑向位移脈動明顯大于滑模控制系統,表明滑模控制系統具有更優良的穩定性能。
4 結 語
本文針對雙繞組BFSPMM驅動系統,基于滑模變結構控制思想,提出了一種轉子徑向懸浮控制方法,理論分析與仿真結果表明:與傳統PI控制方法相比,采用滑模控制方法,有效地降低了轉子徑向偏移量、徑向偏移脈動,提高了系統響應速度以及抗干擾能力,整體控制效果更好。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36