改進模糊PID方法及其在電液伺服控制中的應用*
2021-05-24 08:50:48汪成文張震陽吉鑫浩趙贊魁
機電工程 2021年5期
陳 帥,汪成文,2,3*,張震陽,吉鑫浩,趙贊魁
(1.太原理工大學 機械與運載工程學院,山西 太原 030024;2.太原理工大學 新型傳感器與智能控制教育部/山西省重點實驗室,山西 太原 030024;3.浙江大學 流體動力與機電系統國家重點實驗室,浙江 杭州 310058)
0 引 言
因具有功重比大,能夠以高精度和快速響應來驅動大慣量和重負載的特點,電液伺服系統在各行各業都得到了廣泛的應用,尤其是在工業現場和國防武器系統中應用最為普遍,如挖掘機上大臂小臂的驅動系統、渦輪機的變槳系統、艦船火炮的驅動系統等[1-3]。
學術界和工業界對高性能電液伺服控制技術的需求越來越來迫切。然而,在實際工作中,隨工況的變化,電液伺服系統的泄漏系數、阻尼、剛度等參數都是時變的,而且系統所受的外界干擾也是不確定的,因此,由一組預先設定好的控制參數值往往不能滿足工況需求,并確保系統具有良好的控制效果。對此,研究人員引入了擁有智能化特點的模糊控制與PID控制相結合的復合控制算法—模糊PID控制算法。模糊PID控制算法可解決PID控制參數固定不變的問題,又可以使控制算法在系統數學模型未能精準創建的情況下,兼具優異的伺服控制性能和魯棒性[4,5]。
國內外部分高校和研究單位對模糊PID進行了相關研究與應用:李文靜等人[6]345將模糊PID控制器應用于列車制動電液控制系統中,對高頻電磁閥的開關動作進行了調控,實現了制動系統壓力的比例控制。葛雷等人[7]11將模糊PID控制器運用在工業蝶閥電液伺服控制系統中,驗證了模糊PID的控制效果明顯優于PID控制。LIU F C等人[8]356利用模糊PID控制器對空間操縱器進行了控制,并與PID控制進行了對比,發現模糊PID的控制性能對機械臂的軌跡控制更為有效。鐘定清等人[9]663在模糊PID控制器的基礎上引入了支持向量回歸預測算法,提出了一種支持向量機模糊PID控制策略,實現了交流電力測功機控制系統的“超前”控制。LUO Q Z等人[10]3362提出了一種前饋模糊邏輯PID算法,在抗干擾性能和跟蹤精度方面都得到了有效的提升。BOUKHALFA G等人[11]1887將粒子群優化算法與模糊PID算法相結合,利用粒子群算法對模糊PID的比例因子進行了優化,并將該控制策略應用于雙星感應電機直接扭矩控制中,結果表明該控制策略有效減少了高轉矩脈動,以及縮短了上升時間。其中,文獻[9-11]所提的與其他先進算法結合的復合模糊PID控制策略,雖然在一定程度上進一步提高了系統的性能,但其算法結構復雜、計算成本大。此外,文獻[6-8]以及文獻[12-17]均是對傳統模糊PID控制算法的研究與應用。
對上述文獻中模糊PID控制算法的模糊規則庫進行分析,可以得出其對PID 3個參數Kp、Ki、Kd進行在線調整的修正機制是PID整定的專家經驗[18,19]。
目前,大多數關于模糊PID的研究都是基于傳統的模糊規則庫開展的,傳統模糊規則庫存在的問題是:傳統模糊PID控制算法依據ΔKp規則庫對PID的Kp參數進行在線修正時,ΔKp規則庫中的部分規則與PID整定的專家經驗存在矛盾,致使對Kp參數進行在線修正時精準度不足。例如,當誤差|e|較大時,為使系統能盡快達到穩態,且能以較高的精度跟蹤指令信號,依據PID整定經驗,無論誤差的變化趨勢如何,此時的Kp值應取大值,但傳統模糊PID的ΔKp規則庫中的部分規則反而會使Kp值減小。如當E、EC均為正大PB時,此時依據PID整定經驗,Kp值應取大值,然而,傳統模糊PID規則庫中ΔKp對應的是負大NB,反而使Kp值變小,產生矛盾。
針對上述問題,筆者提出一種改進模糊PID算法。
1 控制對象系統描述
筆者以典型的電液位置伺服閥控缸系統為控制對象,其結構如圖1所示。

圖1 電液位置伺服閥控缸系統示意圖xd—給定信號;xp—作動器活塞桿的位移,控制器做差值控制調節伺服閥的開口大小,實現位置閉環控制
2 模糊PID控制器設計
2.1 模糊PID控制器結構
模糊PID控制器采用雙輸入三輸出的形式,以液壓缸活塞桿輸出位移的誤差e(t)和誤差變化率ec(t)為輸入,輸出為PID 3個參數的增量ΔKp、ΔKi、ΔKd。
PID控制參數在線修正公式如下:
(1)
式中:Kp0,Ki0,Kd0—PID控制器的初值;Ke,Kec—量化因子;KΔp,KΔi,KΔd—比例因子。
模糊PID控制器結構如圖2所示。
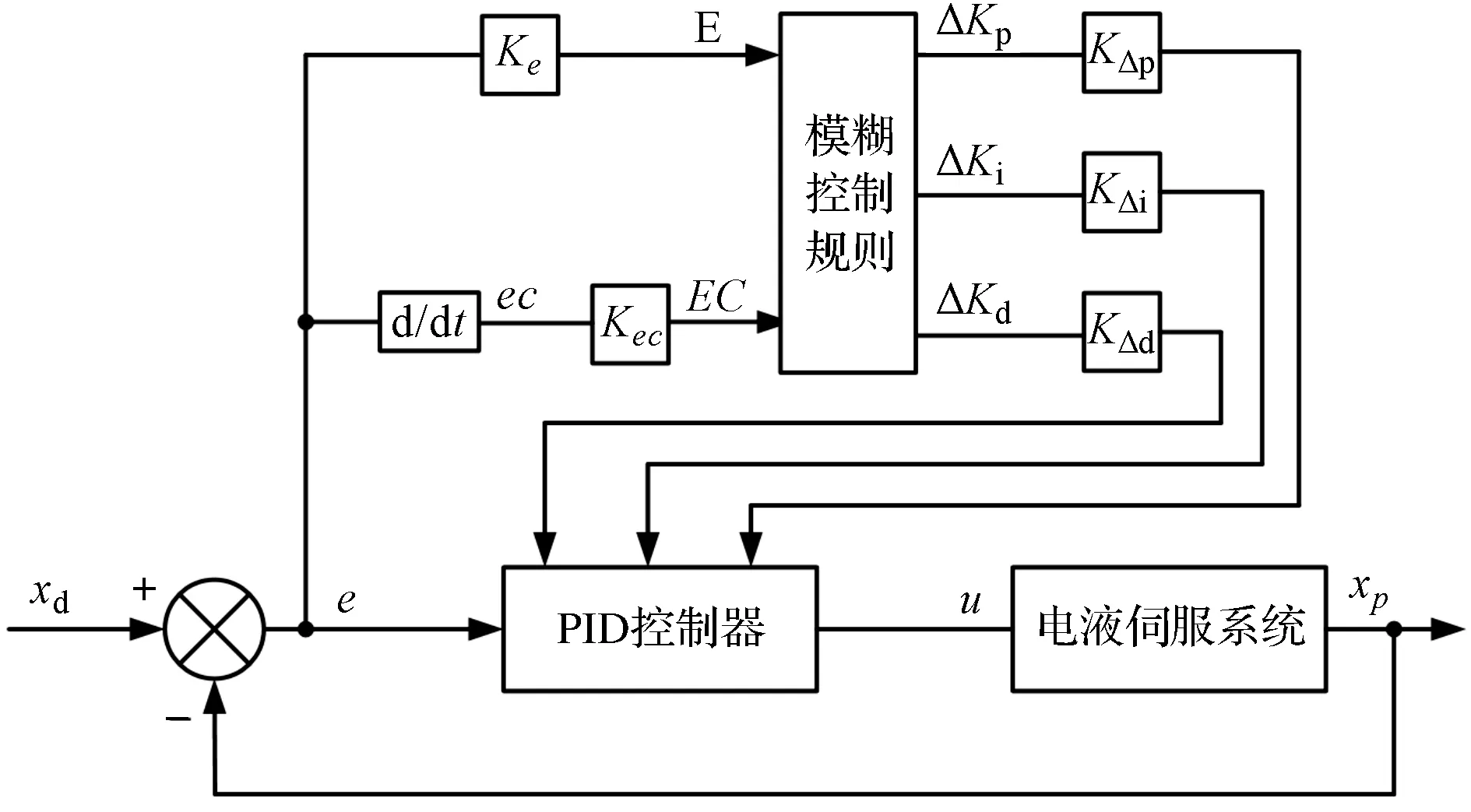
圖2 模糊PID控制器結構示意圖
2.2 規則改進模糊PID(FPID)控制策略
隸屬函數的選取直接影響著系統的控制性能。一般在誤差比較大的場合,選取分辨率低的隸屬函數smf或zmf,在誤差接近于0的情況下,筆者選取分辨率高的隸屬函數trimf,故選取傳統模糊PID算法和規則改進模糊PID算法的輸入/輸出變量中7個語言變量:NB(負大)、NM(負中)、NS(負小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)所對應的隸屬函數均分別為zmf、trimf、trimf、trimf、trimf、trimf、smf,其分布如圖3所示。

圖3 輸入/輸出變量隸屬函數分布圖
根據PID整定的專家經驗,并參考論文對傳統模糊PID控制器中模糊控制規則庫的編制規律,針對傳統模糊PID中模糊規則庫存在的問題,筆者對傳統模糊PID的ΔKp規則庫進行分析,明確哪些規則與PID整定的經驗不符,對其進行修正與改進,并通過仿真實驗做進一步的調整,即可形成新的ΔKp規則庫。
傳統的模糊PID的規則庫如表1所示。

表1 傳統的ΔKp、ΔKi、ΔKd模糊規則庫
新的規則改進后的模糊PID的模糊規則庫如表2所示。

表2 規則改進后的ΔKp、ΔKi、ΔKd模糊規則庫
ΔKp規則庫改進思路:
若e(t)·ec(t)>0時,表明系統的輸出隨時間的推移趨于發散狀態,即誤差|e(t)|會越來越大,此時為了快速降低誤差使系統能再次達到穩態,就必須適當增大Kp。由公式Kp=Kp0+KΔp·ΔKp(KΔp>0)可知,此時,模糊控制應輸出一個正的ΔKp值;因此,當誤差|e|較大時,為使系統具有快速的響應能力,ΔKp應取大值,故當E、EC均為PB時,ΔKp應為PB,而傳統模糊PID的ΔKp規則庫中對應的為NB(模糊控制輸出的ΔKp值為負),產生矛盾,因此需對此條規則進行調整;當誤差|e|減小為中等大小時,為保證系統即具有足夠的響應能力,又能避免產生較大的超調,ΔKp應取適中值,故當E、EC均為PM時,ΔKp應為PM,而傳統模糊PID的ΔKp規則庫中對應的為NM(模糊控制輸出的ΔKp值為負),產生矛盾,因此需對此條規則進行調整;當誤差|e|較小時,為避免系統在達到穩態時出現振蕩,ΔKp應取小值,故當E、EC均為PS時,ΔKp應為PS,而傳統模糊PID的ΔKp規則庫中對應的為NS(模糊控制輸出的ΔKp值為負),產生矛盾,因此需對此條規則進行調整;根據該思路便可完成對ΔKp規則庫中E與EC同號規則的優化與改進。
同理,若e(t)·ec(t)<0時,表明系統的輸出隨時間的推移趨于收斂狀態,即誤差|e(t)|會越來越小,此時為了使系統的輸出穩定在穩態值附近,只需根據偏差|e|的大小和偏差變化率|ec|的快慢對ΔKp適當取值即可;根據該思路便可完成對ΔKp規則庫中E與EC異號規則的優化與改進。
新的規則改進后的模糊PID控制器的ΔKp規則庫,與傳統的模糊PID控制器的ΔKp規則庫的差異,可通過ΔKp規則庫的曲面圖直觀地反映出來,如圖4所示。

圖4 不同規則庫下的ΔKp規則庫曲面圖對比
3 仿真驗證
筆者以閥控對稱缸系統為被控對象,對規則改進后的模糊PID控制性能進行仿真研究與分析。在AMESim中搭建閥控對稱缸的液壓系統模型,利用MATLAB的Simulink模塊庫,實現筆者所提控制器的設計,通過MATLAB自帶的Fuzzy工具箱,完成對所設計的模糊規則庫的編寫與創建,借助2個軟件的接口技術,實現一個完整的電液位置伺服系統的建模。
在AMESim中搭建的閥控對稱缸的液壓系統模型如圖5所示。

圖5 閥控對稱缸的液壓系統模型
閥控對稱缸系統主要參數如表3所示。

表3 閥控對稱缸系統主要參數
在Simulink中搭建的改進模糊PID控制器的模型如圖6所示。

圖6 改進模糊PID控制器模型
為檢驗規則改進后的模糊PID(FPID)控制器是否具有快速的響應能力,以及更好的位置跟蹤精度和抗干擾能力,筆者以電液位置伺服閥控缸系統為被控對象跟蹤階躍信號,并與PID控制器和傳統模糊PID控制器進行對比分析;
此外,為驗證所設計的模糊PID控制器在系統的啟閉過程中是否仍具有良好的控制效果,筆者以正弦信號來模擬系統的啟閉過程,做了兩組跟蹤正弦信號的仿真研究,以進一步檢驗所設計控制器的優越性和可行性。
3.1 跟蹤40 mm的階躍信號
輸入40 mm的階躍信號,為模擬突變干擾的影響,假設在5 s時加入一個幅值為3 000 N的階躍力模擬突變干擾。此時,系統位置跟蹤曲線、動態跟蹤誤差曲線如圖7所示。

圖7 加入階躍干擾力的階躍響應
其中,PID控制的參數:P=600、I=550、D=20;模糊PID控制的參數:Ke=1 500、Kec=30,KΔp=100、KΔi=45.8、KΔd=1.67,Kp0=600、Ki0=550、Kd0=20。
從圖7(a)可以看出:這3種控制方法均能實現對位置指令的精確跟蹤,但跟蹤精度與抗干擾能力有所差別。傳統模糊PID控制和PID控制在1 s附近均出現不同程度的超調量,而改進模糊PID控制的超調量很小幾乎沒有;
此外,3種控制策略下系統達到穩態的時間也大不相同,改進模糊PID控制下系統在1.5 s處達到穩態,而系統在其余兩種控制器作用下都是在2.8 s后才進入穩態;在5 s處加入突變干擾后,3種控制方案下系統均出現了波動,但改進模糊PID控制的波動情況明顯小于其余控制算法,抗干擾能力更強。
從圖7(b)可以看出:PID控制下系統的最大位置跟蹤誤差為給定指令的9.5%;傳統模糊PID控制下系統的位置跟蹤誤差在5.5 s~6.1 s超過了給定指令的7.5%(最大為10.1%),其他時間段里的位置跟蹤誤差在給定指令的7.5%以內;而改進模糊PID控制下系統的最大位置跟蹤誤差僅占給定指令的5.2%,相比于PID控制器所設計的規則改進后的模糊PID控制器的最大位置跟蹤誤差縮小了45.26%,所設計的規則改進后的模糊PID控制器相比于傳統模糊PID控制器,最大位置跟蹤誤差縮小了48.52%,系統動態跟蹤誤差明顯小于其他兩種控制方法。
由此可以得出結論,即與其余兩種控制器相比,改進的模糊PID控制器響應能力更快、伺服跟蹤精度更高、抗干擾能力更強。
3.2 跟蹤1 Hz~40 mm的正弦信號
輸入40sin(2πt) mm的正弦信號,為模擬實時變化的干擾力,0 s時加入3 000sin(2πt) N的干擾力,模擬時變干擾。此時,系統位置跟蹤曲線、動態跟蹤誤差曲線如圖8所示。

圖8 加入正弦干擾力的正弦響應
其中,PID控制的參數:P=7 500、I=2 500、D=5;模糊PID控制的參數:Ke=1 500、Kec=30,KΔp=450、KΔi=208、KΔd=0.5,Kp0=7 500、Ki0=2 500、Kd0=5。
從圖8(a)以及局部放大圖可以看出:這3種控制方法均能實現對位置指令的精確跟蹤并且都具有一定的魯棒性,但改進模糊PID控制下系統的伺服跟蹤精度優于其余兩種控制方法。
從圖8(b)可以看出:在加入時變干擾的情況下,PID控制器的最大跟蹤誤差為給定指令的7.95%;傳統的模糊PID控制器的最大跟蹤誤差占給定指令的9.6%;而規則改進后的模糊PID控制器的最大跟蹤誤差僅為給定指令的6.47%,相比于PID控制器所設計的規則改進后的模糊PID控制器的最大位置跟蹤誤差縮小了18.62%,所設計的規則改進后的模糊PID控制器相比于傳統模糊PID控制器,最大位置跟蹤誤差縮小了32.61%,系統動態跟蹤誤差明顯小于其他兩種控制方法。
由此可以得出結論:在系統的啟閉過程中,所設計的規則改進后的模糊PID控制器仍具有良好的控制效果和抗干擾能力。
現實中干擾一般是復雜無規律的,因此為了使仿真更接近現實,同時為了進一步對比傳統模糊規則庫和改進模糊規則庫對PID參數在線修正的靈活性和準確性,筆者用一組復合的干擾力來模擬復雜無規律的干擾,即將上述仿真中,將有規律的正弦干擾力改為復雜的復合干擾力。
此時,系統的動態跟蹤誤差曲線如圖9所示。
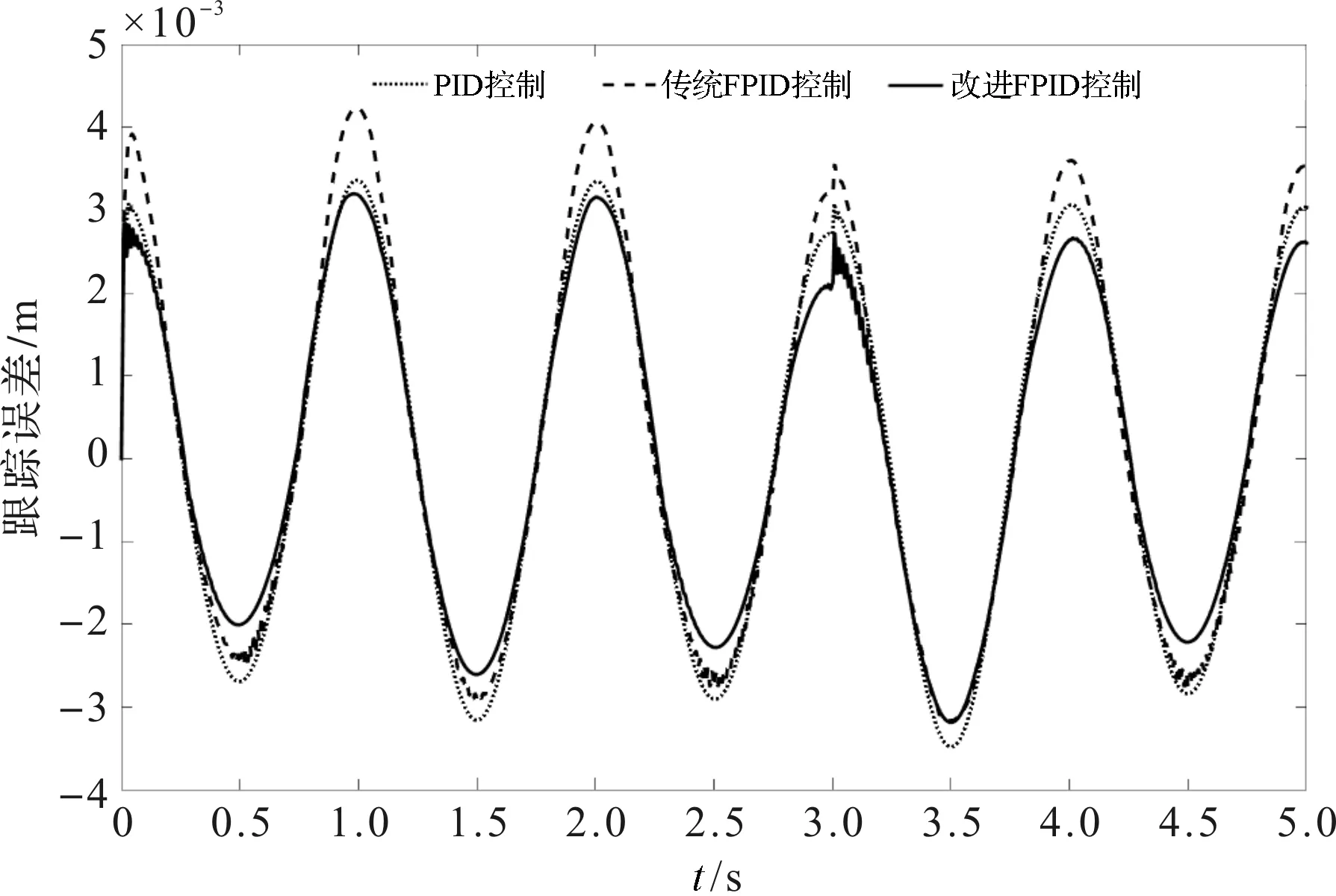
圖9 加入復合干擾力的正弦響應
其中,復合干擾力的函數表達式如下:

(2)
復合干擾力曲線如圖10所示。

圖10 復合干擾力
從圖9可以看出:將正弦干擾力換為復合干擾力后,傳統模糊PID控制在0.5 s、2.5 s、4.5 s均出現了不同程度的抖震現象,改進模糊PID控制在3 s處因干擾力的跳躍性變化而產生了輕微的抖震,但很快就趨于穩定,相比于傳統模糊PID控制,其穩定性得到了顯著提升;此外,改進模糊PID器控制下系統的動態跟蹤誤差明顯依舊小于其他兩種控制方法。
結合圖8(b)和圖9可以看出:在加入干擾的情況下,傳統模糊規則庫和改進模糊規則庫均能實現對PID參數的在線修正,但修正能力有所差別,傳統模糊規則庫因存在精準度不足的問題而導致其正向跟蹤誤差大于PID控制器的正向跟蹤誤差,而改進模糊規則庫克服了該問題,故改進模糊PID控制下無論是正向誤差還是負向誤差均比PID控制下的小。
由此可以得出結論,即所設計的規則改進后的模糊PID控制器的模糊規則庫更符合PID的調整規律,對Kp、Ki、Kd進行調整時更加靈活與準確。
綜上仿真結果可以說明:相比于傳統的ΔKp規則庫,改進后的ΔKp規則庫更符合Kp的調整規律,對Kp參數進行調整時更加靈活與準確;故在系統發生擾動時,規則改進后的模糊PID控制器的響應更加迅速、抗干擾能力更強。
4 結束語
針對目前傳統模糊PID控制算法存在精準度不足的問題,筆者提出了一種改進模糊PID算法,其核心是對傳統模糊PID中的規則庫進行修正,改進后的模糊PID智能控制策略綜合了PID控制和模糊控制的優勢,具有優異的伺服跟蹤精度和抗干擾能力;為了驗證改進方法的可行性和有效性,筆者通過Simulink搭建了新的模糊規則庫,在此基礎上完成了對改進模糊PID控制器的設計;最后以電液位置伺服閥控缸系統為研究對象,對所提控制策略進行了聯合仿真。研究結論如下:
(1)筆者提出的改進模糊PID控制器統一了模糊控制與PID控制的優勢,即解決了PID控制參數固定不變的問題,又可以使控制算法在系統數學模型未能精準創建的情況下,兼具優異的伺服控制性能和魯棒性;
(2)與傳統的模糊規則庫相比,筆者所提的改進后的模糊規則庫中的ΔKp規則庫更符合Kp的調整規律,對Kp、Ki和Kd的參數進行在線修正時,顯得更加靈活與準確,故更適合于PID控制參數的在線修正與自整定;
(3)聯合仿真的結果表明:改進模糊PID控制器克服了傳統模糊PID控制器存在的問題,其伺服跟蹤精度和抗干擾能力都得到了顯著的提升。
另外,在該控制策略中的優化ΔKp規則庫思路,可以為將來模糊PID控制的改進與優化提供一條新的途徑。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45