基于GADF與卷積神經(jīng)網(wǎng)絡(luò)的滾動(dòng)軸承故障診斷研究*
2021-05-24 08:50:48劉紅軍魏旭陽(yáng)
機(jī)電工程 2021年5期
劉紅軍,魏旭陽(yáng)
(沈陽(yáng)航空航天大學(xué) 機(jī)電工程學(xué)院,遼寧 沈陽(yáng) 110000 )
0 引 言
在現(xiàn)今機(jī)械設(shè)備中,旋轉(zhuǎn)機(jī)械是機(jī)械設(shè)備中最常見和最重要的組成部件之一。滾動(dòng)軸承作為旋轉(zhuǎn)設(shè)備最基本的結(jié)構(gòu)之一,對(duì)機(jī)械設(shè)備的壽命與穩(wěn)定性有著決定性的影響。
因此,國(guó)內(nèi)外許多學(xué)者對(duì)滾動(dòng)軸承的故障檢測(cè)進(jìn)行了深入的研究[1],并提出了許多有價(jià)值的方法。大部分檢測(cè)方法多采用對(duì)滾動(dòng)軸承的故障信號(hào)進(jìn)行分析,提取有效特征作為輸入,導(dǎo)入各種分類器中進(jìn)行識(shí)別。如楊宇等[2]通過(guò)EMD和神經(jīng)網(wǎng)絡(luò)結(jié)合的故障診斷方法;劉韜等[3]通過(guò)KPCA和耦合隱馬爾科夫模型的軸承故障診斷。
但此類方法存在過(guò)程復(fù)雜、缺少靈活性、對(duì)專家的經(jīng)驗(yàn)與知識(shí)具有依賴性,以及分類器缺少非線性擬合能力等問(wèn)題。
近些年來(lái),深度學(xué)習(xí)的非線性擬合能力在軸承故障檢測(cè)方面得到了充分的展示,并獲得了理論上的高精度診斷水平。其中,卷積神經(jīng)網(wǎng)絡(luò)(CNN)因其自身具有共享權(quán)值與偏重、局部感受野和子采樣測(cè)量等特點(diǎn),與深度信念網(wǎng)絡(luò)(DBN)[4]和限制玻爾茲曼機(jī)(RBM)[5]等其他深度學(xué)習(xí)方法相比,在語(yǔ)音以及圖像分類任務(wù)方面具有較大的優(yōu)勢(shì)。同時(shí),其在故障診斷領(lǐng)域的應(yīng)用也日益增多。
CNN在執(zhí)行數(shù)據(jù)分類任務(wù)時(shí),作為輸入的數(shù)據(jù)集可分為一維數(shù)據(jù)和二維數(shù)據(jù)兩類。如孫曙光等[6]提出的一維CNN的低壓萬(wàn)能式斷路器附件故障診斷;肖雄等[7]的一種二維CNN優(yōu)化軸承故障診斷方法。WU Y等[8]對(duì)兩種類型數(shù)據(jù)進(jìn)行了比較,認(rèn)為在已有的大多數(shù)CNN模型中,二維圖像數(shù)據(jù)更適用于神經(jīng)網(wǎng)絡(luò)的模型的訓(xùn)練。而如何將一維振動(dòng)信號(hào)清晰地轉(zhuǎn)化為二維圖像數(shù)據(jù),成為智能故障檢測(cè)的重要難點(diǎn)。
基于以上分析,筆者提出一種新的故障診斷方式,由格拉姆角差場(chǎng)(GADF)時(shí)間序列編碼方式[9]將一維時(shí)序數(shù)據(jù)轉(zhuǎn)換為二維圖像數(shù)據(jù),并結(jié)合改進(jìn)的CNN模型進(jìn)行預(yù)測(cè),以達(dá)到高精度診斷的效果。
1 格拉姆角差場(chǎng)圖像編碼轉(zhuǎn)換
GADF圖像編碼的本質(zhì)是通過(guò)格拉姆角場(chǎng)(GAF),將獲取到的一維時(shí)序數(shù)據(jù)轉(zhuǎn)化為二維圖像數(shù)據(jù)的方法;將時(shí)間序列X縮放入?yún)^(qū)間[-1,1],再將其極坐標(biāo)化得到x。
其過(guò)程如下:
(1)
θ=arc cos(xi),-1≤xi≤1,xi∈X
r=ti/N,ti∈N
(2)
經(jīng)過(guò)上述變換過(guò)程,即可將一維時(shí)間序列數(shù)據(jù)轉(zhuǎn)換為對(duì)稱的帶有顏色、點(diǎn)、線的對(duì)稱特征圖像。
當(dāng)GAF基于正弦函數(shù)時(shí)生成格拉姆角差場(chǎng)(GADF),如下式所示:
(3)
通過(guò)編碼轉(zhuǎn)化為二維圖像,GADF編碼的示意圖如圖1所示。

圖1 GADF編碼示意圖
在圖1中,當(dāng)?shù)谝粋€(gè)波峰出現(xiàn)時(shí),在兩種特征圖中出現(xiàn)顏色較淺的對(duì)稱交叉線;而當(dāng)峰值波動(dòng)較大時(shí),特征圖中與其對(duì)應(yīng)的對(duì)應(yīng)交叉線其顏色更為明顯;
與此同時(shí),其余較小的震動(dòng)在GADF特征圖中也完整地表現(xiàn)出來(lái)。
由此可見,GADF可以將滾動(dòng)軸承的震動(dòng)信號(hào)完整地映射為二維特征圖像,并作為CNN模型的輸出。
2 卷積神經(jīng)網(wǎng)絡(luò)
卷積神經(jīng)網(wǎng)絡(luò)(CNN)是一種前饋式神經(jīng)網(wǎng)絡(luò),其卷積層與池化層具有強(qiáng)大的數(shù)據(jù)特征提取能力,適用于處理圖像與聲音等網(wǎng)狀結(jié)構(gòu)數(shù)據(jù),神經(jīng)網(wǎng)絡(luò)模型中濾波器通過(guò)對(duì)輸入數(shù)據(jù)的迭代和分析來(lái)獲得更多的有效特征和隱藏信息;同時(shí)結(jié)合稀疏式全連接和權(quán)重偏置的共享機(jī)制,在時(shí)間與空間上進(jìn)行采樣,降低了數(shù)據(jù)的復(fù)雜程度,相比其他神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)類型減少了訓(xùn)練量,有效避免了算法過(guò)擬合。
CNN模型結(jié)構(gòu)簡(jiǎn)圖如圖2所示。

圖2 CNN模型結(jié)構(gòu)簡(jiǎn)圖
2.1 卷積層
卷積層是整個(gè)神經(jīng)網(wǎng)絡(luò)模型的核心所在,它通過(guò)對(duì)輸入圖像數(shù)據(jù)的卷積運(yùn)算提取圖像中的特征信息。
卷積層的具體運(yùn)算如下:
(4)

2.2 池化層
池化層的主要目的是降低卷積層處理后的數(shù)據(jù)維度。因?yàn)榫矸e后的數(shù)據(jù)雖然具有了之前數(shù)據(jù)的特征信息,但是其特征維度也急劇增長(zhǎng)。為了匯總特征平面的輸出,通常采用兩種池化方式,即平均池化與最大池化方式。
其中,池化層的具體運(yùn)算如下:
(5)
2.3 全局池化層
與傳統(tǒng)的全連接層相比,全局池化層降低了運(yùn)算的參數(shù)量,提高了模型的泛化能力,減少了過(guò)擬合情況的發(fā)生。與Dropout[10]相比,全局池化層提高了正則化效果。
在現(xiàn)代卷積架構(gòu)中,全局池化已經(jīng)逐漸取代了Dropout的位置。全局池化[11]的核心思想是,將每張圖片的所有特征值融合為一個(gè)特征值,實(shí)現(xiàn)張量的降維轉(zhuǎn)換,使特征值的維數(shù)等于最后一層卷積層的數(shù)目。

(6)
(7)
其中,式(6)代表的是最大全局池化,式(7)為全局平均池化。
3 試驗(yàn)研究
3.1 數(shù)據(jù)采集及編碼
為評(píng)估GADF-CNN算法對(duì)滾動(dòng)軸承故障智能診斷的有效性和準(zhǔn)確性,此次采用的試驗(yàn)數(shù)據(jù)集為美國(guó)凱西儲(chǔ)大學(xué)(case western reserve university,CWRU)公開的深溝球軸承故障數(shù)據(jù)集。
電機(jī)負(fù)載狀態(tài)為1 797 r/min、1 772 r/min、1 750 r/min、1 797 r/min 4種,故障分為外圈、內(nèi)圈與流動(dòng)體;
采集頻率為12 kHz,采用傳感器置于電機(jī)的驅(qū)動(dòng)端的12個(gè)位置進(jìn)行采集,采集時(shí)長(zhǎng)為10 s;
因傳感器采集信號(hào)時(shí),轉(zhuǎn)軸每圈所采集到的采樣點(diǎn)約為400個(gè);
為確保數(shù)據(jù)集的穩(wěn)定性,每種故障分類樣本長(zhǎng)度設(shè)置為500個(gè)采樣點(diǎn),各200個(gè)樣本。
本文選取1 797 r/min負(fù)載下,包括正常狀態(tài)與11種故障狀態(tài)的共12種情況作為數(shù)據(jù)集,分別由0~11數(shù)字表示,取前80%為訓(xùn)練集,輸入已建立好的CNN模型;其余為測(cè)試集對(duì)訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)模型進(jìn)行檢驗(yàn)。
二維故障圖分類圖如圖3所示。
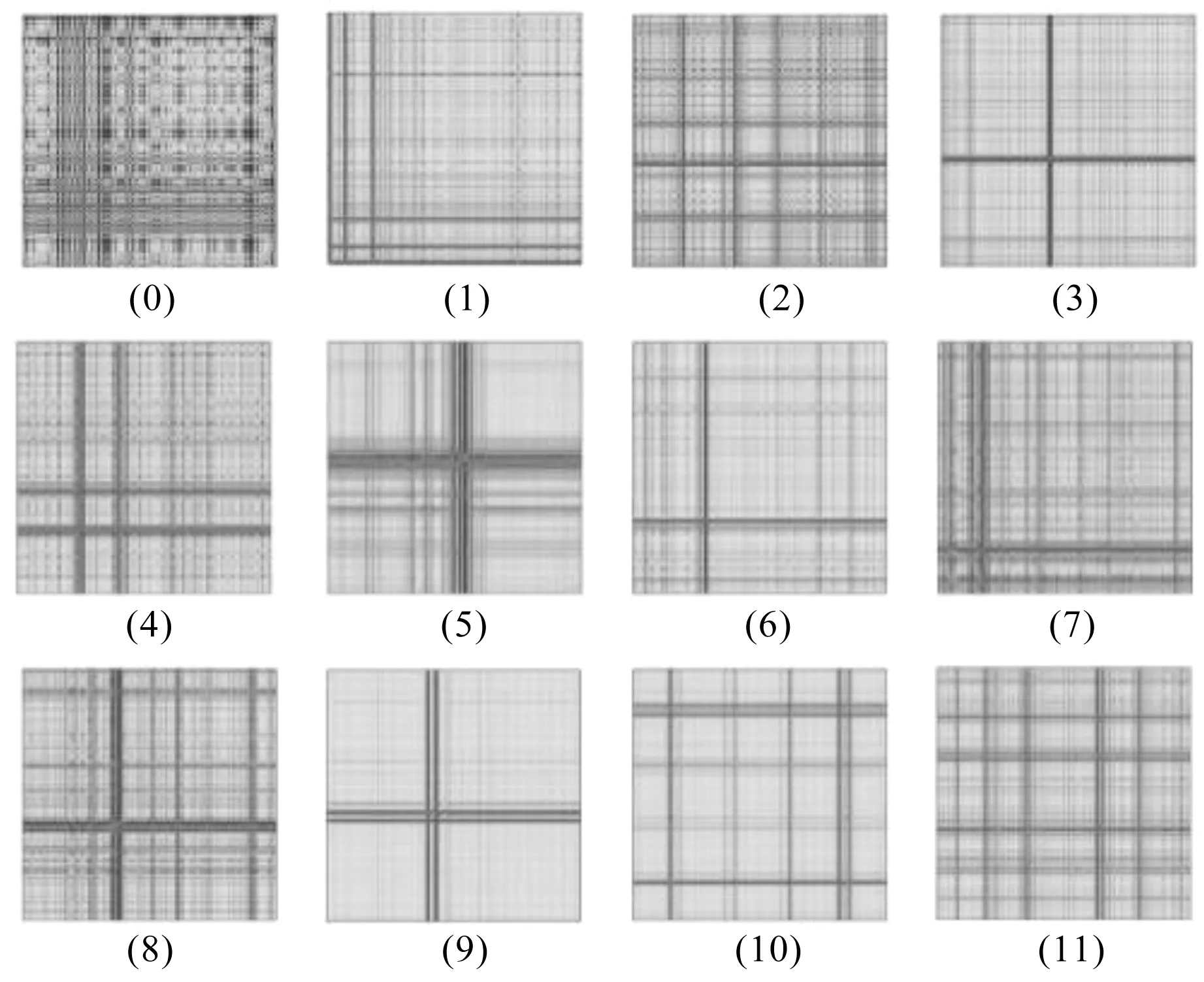
圖3 二維故障圖分類圖
3.2 卷積神經(jīng)網(wǎng)絡(luò)模型超參數(shù)優(yōu)選
超參數(shù)的選擇決定了整個(gè)卷積神經(jīng)網(wǎng)絡(luò)模型在故障診斷的精準(zhǔn)度,通常CNN中主要的超參數(shù)有卷積核、池化核、優(yōu)化器、激活函數(shù)、學(xué)習(xí)率等。
本次實(shí)驗(yàn)為了掌握不同超參數(shù)對(duì)CNN模型圖像處理性能的不同影響經(jīng)過(guò)多次調(diào)參,確立了一種由3卷積層與雙池化層穿插連接,采用全局池化層替代傳統(tǒng)卷積層的神經(jīng)網(wǎng)絡(luò)模型。該模型搭建平臺(tái)為tensorflow2.0.0GPU版,編譯語(yǔ)言為Python3.7.3,計(jì)算機(jī)CPU為i7、Windows10。
改進(jìn)CNN模型結(jié)構(gòu)表如表1所示。

表1 改進(jìn)CNN模型結(jié)構(gòu)表
3.2.1 激活函數(shù)的選擇
激活函數(shù)決定了CNN模型非線性表達(dá)能力,而該激活函數(shù)通常根據(jù)經(jīng)驗(yàn)來(lái)設(shè)置。但是這種方式隨機(jī)性較大[12]。為此本文選擇了常用的3種常用的激活函數(shù)進(jìn)行對(duì)比試驗(yàn)。
3種常用的激活函數(shù)對(duì)比如表2所示。

表2 激活函數(shù)對(duì)比表
由表2可以看出:
實(shí)驗(yàn)1準(zhǔn)確率最高,雖然在訓(xùn)練用時(shí)方面用時(shí)最長(zhǎng),但為保證模型的準(zhǔn)確度,在改進(jìn)神經(jīng)網(wǎng)絡(luò)模型中,本文選用Relu激活函數(shù)。
3.2.2 優(yōu)化器的選擇
在優(yōu)化器選擇實(shí)驗(yàn)中繼續(xù)采用表1中的基準(zhǔn)模型參數(shù)設(shè)置,該實(shí)驗(yàn)的卷積層采用Relu激活函數(shù)。該實(shí)驗(yàn)對(duì)目前最常用的SGD,RMSProp和Adam共3種優(yōu)化器進(jìn)行測(cè)試。
當(dāng)學(xué)習(xí)速率為0.000 1和0.001時(shí),Adam與RMSProp的準(zhǔn)確率遠(yuǎn)高于SGD;而當(dāng)學(xué)習(xí)速率升高時(shí),RMSProp準(zhǔn)確率急劇下降,Adam優(yōu)化器準(zhǔn)確率依然穩(wěn)定在97%左右。
為此,本文選用Adam小批量迭代優(yōu)化器。
優(yōu)化器準(zhǔn)確率對(duì)比圖如圖4所示。

圖4 優(yōu)化器準(zhǔn)確率對(duì)比圖
4 結(jié)果分析
4.1 改進(jìn)的CNN模型評(píng)估
為對(duì)GADF圖像編碼下改進(jìn)的CNN算法的準(zhǔn)確性進(jìn)行有效的評(píng)估,本文引用精確率與召回率作為評(píng)測(cè)指標(biāo)。其中,精確率是指預(yù)測(cè)結(jié)果中符合該類故障的樣本占結(jié)果總體的占有率;召喚率是指該類型故障真實(shí)樣本中被成功預(yù)測(cè)的樣本占類型總體的占有率。
其具體數(shù)學(xué)表達(dá)式如下:

(8)
式中:P—精確率;R—召回率;TP—預(yù)測(cè)類型與其真實(shí)類型相符;FP—預(yù)測(cè)類型為真,但實(shí)際類型為假;FN—實(shí)際類型為真,但預(yù)測(cè)結(jié)果為假;F1—精確率與召回率的調(diào)和均值。
根據(jù)改進(jìn)的CNN的實(shí)驗(yàn)結(jié)果,并按公式計(jì)算得到的精確率和召回率,如表3所示。

表3 改進(jìn)CNN模型診斷結(jié)果表

(續(xù)表)
為了更深一層地了解改進(jìn)CNN模型的故障判別情況,筆者引入了多分類混淆矩陣對(duì)故障結(jié)果進(jìn)行全面分析;其根據(jù)故障的不同等級(jí),樣本的真實(shí)值與預(yù)測(cè)值。
故障被誤判為何種類型故障等信息如圖5所示。

圖5 混淆矩陣量化圖
由圖5可知:在480份測(cè)試集樣本中,含有7個(gè)誤測(cè)樣本,分別為:
將標(biāo)號(hào)1類微小故障判斷為標(biāo)號(hào)9類輕型故障;將標(biāo)號(hào)3類輕微故障判斷為標(biāo)號(hào)9類輕型故障和7類顯著故障;將標(biāo)號(hào)6類輕型故障判斷為標(biāo)號(hào)10類輕型故障;將標(biāo)號(hào)8類中度故障判斷為標(biāo)號(hào)5類顯著故障;將標(biāo)號(hào)9類輕型故障判定為標(biāo)號(hào)3類輕微故障;將標(biāo)號(hào)10類輕型故障判定為標(biāo)號(hào)1類微小故障。
通過(guò)分析以上故障類型可以發(fā)現(xiàn),故障誤診類型多為輕型故障,誤診為中大型故障或同級(jí)故障類別發(fā)生錯(cuò)判,具有一定的預(yù)警作用,改進(jìn)后的CNN模型在正常0、故障2、4和11的情況下診斷準(zhǔn)確率為100%,說(shuō)明這類故障特征較為明顯,對(duì)旋轉(zhuǎn)設(shè)備的危害最大。
經(jīng)過(guò)試驗(yàn)驗(yàn)證可知,該算法綜合故障識(shí)別率達(dá)98.55%,對(duì)滾動(dòng)軸承中的GADF編碼圖像具有精準(zhǔn)的識(shí)別能力和優(yōu)越的診斷能力。
4.2 對(duì)比分析
為驗(yàn)證筆者提出的診斷方法的先進(jìn)性與優(yōu)越性,此處將GADF-CNN算法與其余3種主流的智能故障診斷算法進(jìn)行比較。
3種主流智能故障診斷算法分別為BPNN、SAE和SVM[13-15]智能算法。
筆者將二維圖像數(shù)據(jù)測(cè)試集按0~11故障診斷序號(hào)共12種情況,輸入進(jìn)其余智能算法模型進(jìn)行訓(xùn)練。
智能算法的對(duì)比圖如圖6所示。

圖6 智能算法對(duì)比圖
由圖6可以看出:
BP神經(jīng)網(wǎng)絡(luò)模型(BPNN)與支持向量機(jī)(SVM)的準(zhǔn)確率一直維持在90%以下,準(zhǔn)確率較低;而堆棧自動(dòng)編碼器(SAE)的準(zhǔn)確率略低于GADF-CNN。
由此可見,改進(jìn)的CNN模型更適用與對(duì)GADF編碼圖像數(shù)據(jù)的處理。
詳細(xì)的準(zhǔn)確率如表4所示。

表4 詳細(xì)的準(zhǔn)確率
5 結(jié)束語(yǔ)
為充分發(fā)揮深度學(xué)習(xí)識(shí)別二維圖像在滾動(dòng)軸承故障檢測(cè)方面的優(yōu)勢(shì),筆者提出了一種新的故障診斷方式,即格拉姆角差場(chǎng)(GADF)結(jié)合改進(jìn)卷積神經(jīng)網(wǎng)絡(luò)(CNN)的智能故障診斷模型,并結(jié)合改進(jìn)的CNN模型對(duì)滾動(dòng)軸承故障進(jìn)行了預(yù)測(cè),達(dá)到了高精度診斷的效果。
與其他智能診斷算法相比,GADF-CNN具有以下優(yōu)勢(shì):
(1)在對(duì)診斷信號(hào)的特征提取方面,相比其他算法的一維時(shí)序輸入或模態(tài)分解等方法,采用領(lǐng)先的格拉姆角差場(chǎng)法將診斷信號(hào)轉(zhuǎn)化為具有有效特征的二維圖像,對(duì)診斷信號(hào)的特征提取更為全面,同樣也更適合CNN(卷積神經(jīng)網(wǎng)絡(luò))的訓(xùn)練與測(cè)試;
(2)在卷積神經(jīng)網(wǎng)絡(luò)模型的搭建方面,與其他智能算法的診斷相比,由于輸入數(shù)據(jù)轉(zhuǎn)化為真正的二維圖像,使得卷積神經(jīng)網(wǎng)絡(luò)強(qiáng)大的線性表達(dá)能力可以全面地發(fā)揮出來(lái),為此改進(jìn)CNN模型添加了全局池化層、Adam優(yōu)化器、交叉熵?fù)p失函數(shù)等先進(jìn)的超參數(shù),GADF-CNN算法魯棒性和泛化能力。
本文的算法已經(jīng)可以在不同電機(jī)負(fù)載狀態(tài)下,對(duì)來(lái)自于電機(jī)驅(qū)動(dòng)端的振動(dòng)信號(hào)做出有效診斷。但由于數(shù)據(jù)庫(kù)的有限性,本文沒有獲取數(shù)據(jù)庫(kù)以外的滾動(dòng)軸承數(shù)據(jù)進(jìn)行診斷,該算法仍然存在一定的局限性。
獲取數(shù)據(jù)庫(kù)以外的數(shù)據(jù)將成為筆者進(jìn)行下一步實(shí)驗(yàn)研究的重點(diǎn)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21