采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)的應(yīng)用研究
2021-05-26 07:06:04康國俊
山西冶金 2021年2期
康國俊
(西山煤電集團(tuán)公司鐵路公司,山西 太原030053)
隨著科學(xué)技術(shù)的不斷發(fā)展,以采煤機(jī)為代表的大型自動化綜采設(shè)備已經(jīng)廣泛應(yīng)用在煤礦井下綜采作業(yè)過程中,極大的提升了煤炭的綜采效率。采煤機(jī)在綜采作業(yè)過程中主要依靠搖臂角度的調(diào)整來滿足不同高度下的截割作業(yè)需求,在工作過程中搖臂需要承受截割作業(yè)時的截割沖擊等,導(dǎo)致?lián)u臂工作穩(wěn)定性差,一旦出現(xiàn)故障就需要停機(jī)由維修人員進(jìn)行故障查找和排除,效率極低,嚴(yán)重影響了煤礦井下的綜采作業(yè)效率。在對采煤機(jī)搖臂故障進(jìn)行統(tǒng)計分析的基礎(chǔ)上,本文提出了一種新的采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng),其采用了智能監(jiān)控的理論,通過對采煤機(jī)搖臂運(yùn)行狀態(tài)和理論狀態(tài)進(jìn)行對比,判斷出差異點(diǎn),在報警的同時能夠?qū)收衔恢煤统醪皆蜻M(jìn)行分析,幫助維修人員實行快速定位,根據(jù)實際應(yīng)用表明該搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)能夠快速準(zhǔn)確的實現(xiàn)故障定位,使采煤機(jī)停機(jī)維護(hù)時間降低了74.3%以上,平均故障排除時間降低了86.4%,對提升采煤機(jī)的運(yùn)行穩(wěn)定性和使用壽命具有十分重要的意義。
1 采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)
根據(jù)對采煤機(jī)搖臂運(yùn)行故障的分析,目前采煤機(jī)搖臂的故障主要包括三種形式。第一種是采煤機(jī)搖臂內(nèi)部的齒輪、軸承、行星架等傳動機(jī)構(gòu)在沖擊、重載運(yùn)行時的過渡磨損失效或者斷裂失效。第二種是搖臂油箱或者液壓機(jī)構(gòu)處的漏液現(xiàn)象,若不及時處理將導(dǎo)致齒輪磨損加劇,嚴(yán)重影響搖臂使用壽命和穩(wěn)定性。第三種是采煤機(jī)運(yùn)行過程中由于操作不當(dāng)導(dǎo)致的截齒斷裂、傳動系統(tǒng)過熱等故障。
針對采煤機(jī)常見的故障類型,在進(jìn)行搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)設(shè)計時要求系統(tǒng)能夠?qū)Σ擅簷C(jī)搖臂運(yùn)行時的油液溫度、壓力和搖臂運(yùn)行時的振動情況進(jìn)行實時監(jiān)測,當(dāng)監(jiān)測結(jié)果超出系統(tǒng)設(shè)定的安全范圍時開啟聲光報警并自動指示故障位置、提供初步的故障原因提示,便于工作人員能夠在第一時間確定故障具體原因并進(jìn)行修復(fù)[1]。
結(jié)合采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測需求和采煤機(jī)的實際運(yùn)行要求,新的采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)采用了集控時的監(jiān)控結(jié)構(gòu),如圖1所示[2]。
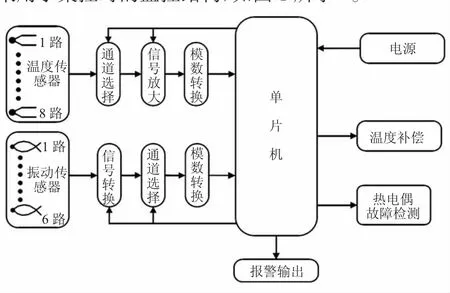
圖1 采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)結(jié)構(gòu)示意圖
由圖1可知,該搖臂狀態(tài)監(jiān)測系統(tǒng)以PLC為監(jiān)測系統(tǒng)為核心,同時在系統(tǒng)內(nèi)還設(shè)置有穩(wěn)壓電源模塊和顯示屏,便于保證在緊急狀態(tài)下的工作穩(wěn)定性。該監(jiān)測系統(tǒng)主要是對采煤機(jī)運(yùn)行時各液壓腔內(nèi)的油液的溫度、搖臂工作時傳動系統(tǒng)的振動情況以及搖臂工作時的范圍角進(jìn)行監(jiān)測。對搖臂油液溫度和振動情況的監(jiān)測主要是通過溫度和振動傳感器,對采煤機(jī)搖臂工作范圍角的監(jiān)測是通過在采煤機(jī)的搖臂上設(shè)置角度傳感器來進(jìn)行判斷。該監(jiān)測系統(tǒng)具有結(jié)構(gòu)簡單、監(jiān)測穩(wěn)定性好、可靠性高的優(yōu)點(diǎn),能夠?qū)崿F(xiàn)對采煤機(jī)搖臂工作時核心參數(shù)的智能監(jiān)控和報警。
2 傳感器設(shè)備選型及工作原理
傳感器是該監(jiān)測系統(tǒng)的核心,其工作的穩(wěn)定性和精度直接決定了搖臂監(jiān)測系統(tǒng)的工作可靠性,因此對傳感器設(shè)備具有很高的工作穩(wěn)定性要求。由于在整個監(jiān)測系統(tǒng)中監(jiān)測點(diǎn)位多,因此為了考慮系統(tǒng)成本,采用了多路模擬信號同步通道切換的數(shù)據(jù)傳輸方案,對多監(jiān)測點(diǎn)的數(shù)據(jù)信號同步解析,然后按優(yōu)先等級進(jìn)行模擬輸出,確保了數(shù)據(jù)傳輸?shù)木_性和經(jīng)濟(jì)性。
對采煤機(jī)搖臂工作溫度的監(jiān)控主要是傳動齒輪箱溫度、軸承穩(wěn)定、搖臂轉(zhuǎn)動處穩(wěn)定、行星頭溫度等,為了保證溫度判別效果的一致性,要求采用同類型的傳感器。經(jīng)過對多種類別傳感器的驗證,最終決定選用K型熱電偶,其采用了雙材質(zhì)導(dǎo)體能夠滿足在空氣、油液內(nèi)的監(jiān)測精度需求,同時為了確保不同導(dǎo)體下溫度監(jiān)測的準(zhǔn)確性,該熱電偶采用了溫度補(bǔ)償控制邏輯,根據(jù)實際監(jiān)測溫度和補(bǔ)償溫度來確定最終的實際溫度,監(jiān)測精度可達(dá)4.3 mV/100℃,具有監(jiān)測精度高、靈敏性好的優(yōu)點(diǎn),其監(jiān)測原理如圖2所示[3]。
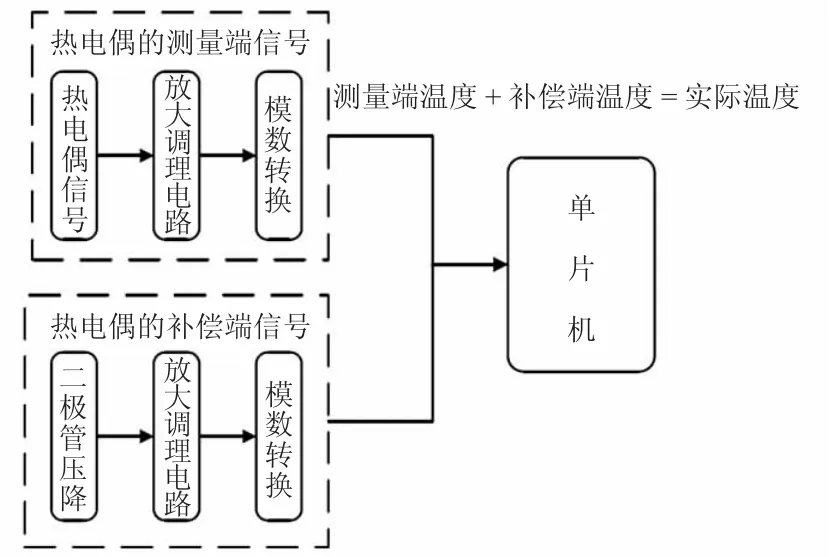
圖2 K型熱電偶監(jiān)測原理示意圖
對采煤機(jī)搖臂振動狀態(tài)的監(jiān)測,既要滿足對微小振動的監(jiān)測需求又要能夠準(zhǔn)確區(qū)分在沖擊載荷下的正常振動,因此針對異常振動會發(fā)出規(guī)律且連續(xù)振動的信號而沖擊載荷在的振動會迅速衰減的情況,提出了采用CT-SD-01型壓電式傳感器[4],在工作時首先從振動源處接收到振動量,然后通過壓電元件將振動量轉(zhuǎn)換為電量,通過放大電路的處理后經(jīng)積分電路和變送電路的分級處理,最終轉(zhuǎn)換為電流信號輸出。振動傳感器的振動信號采集原理如圖3所示。
3 采煤機(jī)搖臂監(jiān)測系統(tǒng)應(yīng)用效果
目前該采煤機(jī)搖臂運(yùn)行監(jiān)測系統(tǒng)已經(jīng)在多個煤礦進(jìn)行了應(yīng)用,監(jiān)測系統(tǒng)的監(jiān)控畫面如圖4所示。
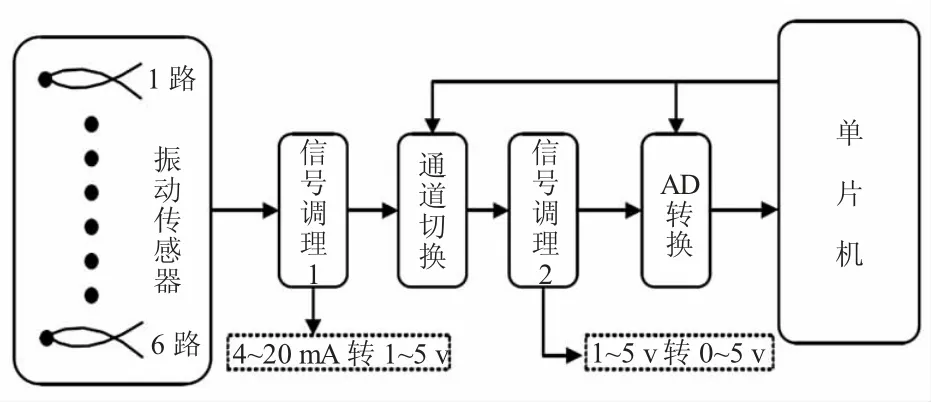
圖3 振動傳感器工作原理示意圖
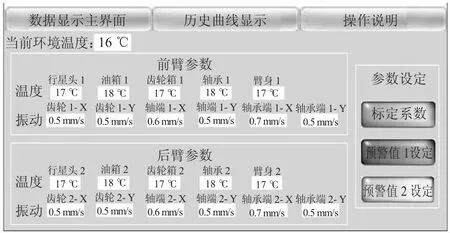
圖4 采煤搖臂監(jiān)測系統(tǒng)界面示意圖
通過對該搖臂監(jiān)測系統(tǒng)應(yīng)用以來采煤機(jī)工作狀態(tài)的分析,該系統(tǒng)能夠精確的對搖臂運(yùn)行過程中的關(guān)鍵參數(shù)進(jìn)行監(jiān)控,一旦超出設(shè)定值能夠及時進(jìn)行聲光報警,提醒工作人員提前對異常點(diǎn)進(jìn)行排查,避免了因異常導(dǎo)致停機(jī)后才對故障進(jìn)行排查而影響井下綜采效率。根據(jù)實際應(yīng)用表明該搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)能夠快速準(zhǔn)確的實現(xiàn)故障定位,使采煤機(jī)停機(jī)維護(hù)時間降低了74.3%以上,平均故障排除時間降低了86.4%,對提升采煤機(jī)的運(yùn)行穩(wěn)定性和使用壽命具有十分重要的意義。
4 結(jié)論
針對目前采煤機(jī)搖臂在高強(qiáng)度工作條件下容易出現(xiàn)故障、人工排查效率低,嚴(yán)重影響井下綜采作業(yè)穩(wěn)定性的情況。提出了一種采煤機(jī)搖臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng),利用傳感器設(shè)備對運(yùn)行時的狀態(tài)進(jìn)行實時監(jiān)測,根據(jù)實際應(yīng)用表明:
1)采煤機(jī)搖臂狀態(tài)監(jiān)測系統(tǒng)以PLC為監(jiān)測系統(tǒng)為核心,具有結(jié)構(gòu)簡單、監(jiān)測穩(wěn)定性好、可靠性高的優(yōu)點(diǎn),能夠?qū)崿F(xiàn)對采煤機(jī)搖臂工作時核心參數(shù)的智能監(jiān)控和報警。
2)傳感器選型應(yīng)滿足高可靠性和高精度監(jiān)測需求,用了多路模擬信號同步通道切換的數(shù)據(jù)傳輸方案,對多監(jiān)測點(diǎn)的數(shù)據(jù)信號同步解析,然后按優(yōu)先等級進(jìn)行模擬輸出,確保了數(shù)據(jù)傳輸?shù)木_性和經(jīng)濟(jì)性。
3)臂運(yùn)行狀態(tài)監(jiān)測系統(tǒng)能夠快速準(zhǔn)確的實現(xiàn)故障定位,使采煤機(jī)停機(jī)維護(hù)時間降低了74.3%以上,平均故障排除時間降低了86.4%,對提升采煤機(jī)的運(yùn)行穩(wěn)定性和使用壽命具有十分重要的意義。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
防爆電機(jī)(2022年1期)2022-02-16 01:14:06
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
計算物理(2014年2期)2014-03-11 17:01:44
河南科技(2014年18期)2014-02-27 14:14:58
