CT26型斷路器操動機構動力學仿真及拐臂疲勞壽命分析
2021-06-03 02:45:58王增彬姚聰偉王立軍
浙江電力 2021年5期
關鍵詞:模型
王增彬,張 拓,姚聰偉,孫 帥,王立軍
(1.廣東電網有限責任公司電力科學研究,廣州 510080;2.廣東省電力裝備可靠性企業重點實驗室,廣州 510080;3.西安交通大學電力設備電氣絕緣國家重點實驗室,西安 710049)
0 引言
高壓開關是電網中的關鍵設備之一,起著控制和保護電路的雙重作用,是電力系統安全可靠運行的重要保障。在電力系統發生的事故中,由開關設備引起的故障占很大比例[1],嚴重影響電力系統安全可靠運行。第三屆CIGRE 斷路器可靠性報告指出,斷路器故障原因占比最高的是操作機構機械故障[2-4],因此對斷路器機械特性進行研究十分必要。斷路器在長期運行過程中,部分受力大的部件可能會出現疲勞損傷,GB 1984—2014[5]對此作出相關規定,因此需要對斷路器機構的關鍵部件進行疲勞壽命分析。
隨著數值仿真技術廣泛應用于現代工業生產過程中,制造物理樣機之前會建立虛擬樣機進行仿真模擬,可以提前了解其性能,提出指導性意見[6-9]。國內外已有諸多學者對斷路器的電弧性質進行了研究[10-11],對斷路器操動機構建立仿真模型,并計算其機械特性[12-15]。高壓斷路器操動機構屬于機械裝置,在其長期運行過程中還應考慮疲勞損傷。國內對于疲勞損傷問題的研究起步較晚,但仍取得許多研究成果[16-18]。文獻[19]利用多體動力學軟件Adams 建立真空斷路器操動機構的虛擬樣機,并對斷路器的分合閘過程進行了仿真;文獻[20]利用機械系統多體動力學分析軟件Motion 與液壓系統仿真軟件AMEsim 建立聯合仿真模型,對420 kV 高壓液壓操動式斷路器機構進行了仿真分析;文獻[21]基于ANSYS Workbench以及nCode DesignLife 軟件對斷路器緩沖器缸體進行有限元疲勞壽命分析,為緩沖器及彈簧操動機構其他零部件的疲勞分析提供了一種新的分析路徑和方法。
本文基于Adams 和AMEsim 軟件建立仿真模型,對252 kV 高壓斷路器CT26-252 型彈簧操動機構分合閘過程的運動情況進行仿真計算,同時對機構運動過程中受力較大的零件進行疲勞壽命計算。
1 斷路器結構與計算原理
1.1 斷路器機構結構簡介
252 kV 高壓斷路器CT26-252 型操動機構為彈簧儲能式機構,其整體模型如圖1 所示。

圖1 斷路器操動機構三維模型
斷路器處于分閘狀態,且合閘彈簧已儲能時,機構狀態如圖1 所示。合閘過程中,合閘線圈動作,釋放分閘保持掣子,合閘彈簧帶動儲能軸旋轉,凸輪撞擊拐臂滾子,主軸旋轉,帶動斷路器動觸頭運動,同時為分閘彈簧儲能,直到合閘保持摯子扣接,完成合閘過程;分閘階段,分閘線圈動作,釋放合閘保持摯子,在分閘彈簧的作用下主軸旋轉,完成分閘過程。
由于分、合閘觸頭動作速度較高,會對機構及滅弧室零部件造成沖擊,因此通常采用添加緩沖裝置的方式來吸收運動部位的分合閘剩余動能,防止沖擊力過大造成斷路器零部件損傷。CT26-252 型操動機構采用油緩沖器進行緩沖。油緩沖器是一個液壓系統,剖視圖如圖2 所示。

圖2 油緩沖器剖視圖
1.2 斷路器操動機構仿真原理
采用動力學仿真設計是復雜機械系統優化設計的主要手段之一,能夠真實地模擬機構零部件運動過程,對多種參數方案進行量化分析,減少樣機制造的試錯次數,縮短產品研制周期與成本。由于油緩沖器屬于簡單液壓系統,Admas 為機械系統仿真分析軟件,不能對油緩沖器部分進行仿真,因此本文聯合采用Adams 與液壓仿真軟件AMEsim,對斷路器分合閘過程的機構運動情況進行仿真。仿真流程如圖3 所示。

圖3 操動機構仿真流程
在SolidWorks 中建立斷路器操動機構的模型,并將該模型導入Adams 中進行相應設置,同時在AMEsim 中建立油緩沖器模型,通過仿真軟件的數據接口完成聯合仿真。
為了分析機構關鍵部件的應力應變情況,研究部件受力形變對機構運動的影響,需要建立剛柔性混合動力學模型,對斷路器機構運動進行更加精確的模擬。基于Adams 的剛柔混合動力學模型仿真分析流程如圖4 所示。

圖4 基于Adams 剛柔混合動力學模型仿真流程
通過剛柔混合動力學模型仿真不僅可以得到柔性體部件在機構運動過程中的應力應變情況,還可以得到在該過程中柔性體部件的載荷譜,為疲勞壽命分析提供基礎數據。
1.3 疲勞壽命仿真原理
若構件在循環恒幅應力S 的作用下,承受N次循環載荷產生疲勞損壞,則其在承受n 次循環時的損傷量化值D 如式(1)所示:

假設構件在應力水平Si作用下,承受ni次循環時的損壞為Di=ni/Ni。若構件承受的一次載荷歷程包括k 個應力水平Si(i=1,2,3,…,k)的作用,每一個應力水平Si包括ni次循環,則可以定義一次載荷歷程下的總損傷如式(2)所示:

式中:ni為Si作用下的循環次數,由載荷譜確定;Ni為Si作用下的疲勞壽命,由S-N 曲線確定。
構件產生疲勞破壞的判斷依據為D=1。
依據上述方法,使用ANSYS workbench 對構件進行受力分析,獲取構件應力分布,從Adams中導出構件的載荷譜。將應力分布與載荷譜導入nCode 進行求解分析,得到疲勞壽命計算結果。
2 仿真過程及結果分析
2.1 斷路器操動機構仿真
2.1.1 多剛體動力學模型仿真結果
采用Adams 與AMEsim 聯合仿真的方法,將斷路器操動機構的各個零件簡化為剛體模型,將緩沖器部分按照液壓系統計算。其中,分閘彈簧彈性系數為156 N/mm,預緊力為10 750 N;2 個合閘彈簧并聯,彈性系數分別為120 N/mm 和85 N/mm,預緊力分別為28 560 N 和19 290 N。斷路器機構的分合閘示意圖如圖5 所示。

圖5 斷路器機構示意圖
仿真時為了減少不必要的計算耗時,在合閘完成且停止彈跳后約40 ms 便讓其開始分閘動作。計算得到輸出拐臂在分合閘過程中的機械行程曲線如圖6 所示。

圖6 分合閘過程中拐臂輸出位移
為驗證仿真結果的準確性,利用機械特性測試儀實際測量同型號機構的分合閘行程曲線。斷路器分閘過程中的實驗結果與仿真結果對比如圖7 所示,可以看出,分閘行程曲線的實驗結果與仿真結果基本吻合,驗證了仿真模型的準確性。
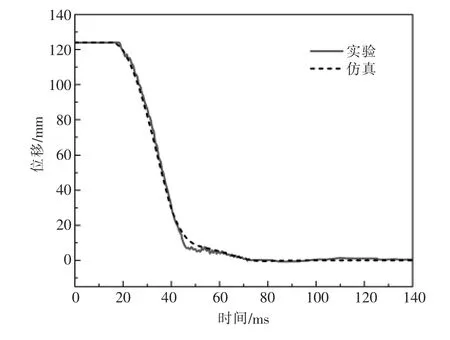
圖7 拐臂行程實驗結果與多剛體動力學模型仿真結果對比
2.1.2 剛柔混合動力學模型仿真結果
在斷路器分合閘過程中,操動機構中的輸出拐臂將承受很大的力,可能在動作過程中產生形變,從而影響機構運動。因此考慮將機構中的輸出拐臂替換為柔性體進行計算,用柔性體代替輸出拐臂后的模型如圖8 所示。將仿真得到的輸出拐臂行程與實驗值進行對比,結果如圖9 所示。

圖8 剛柔混合動力學模型示意圖
由圖9 可以看出,剛柔混合動力學模型仿真結果與實驗結果基本一致,且分閘過程中的速度都在42 ms 處發生突變。原因是斷路器操動機構在運動到約42 ms 時,油緩沖器中連接內腔下部與外腔的油孔全部關閉,油緩沖器對機構的反作用力瞬間增大,導致分閘速度下降。

圖9 拐臂行程實驗結果與剛柔混合模式仿真結果對比
多剛體模型和剛柔混合動力學模型的輸出拐臂位移對比如圖10 所示。可以看出,多剛體動力學模型與剛柔混合動力學模型的仿真結果基本一致,將拐臂替換為柔性體后對機構整體運動模擬影響小。

圖10 2 種仿真模型的結果對比圖
斷路器運動過程中輸出拐臂應變最大的10個點的應變情況如表1 所示,輸出拐臂最大應變為0.002 25。可見,由于輸出拐臂在斷路器機構運動過程中應變量小,所以剛柔混合動力學模型與多剛體動力學模型的仿真結果基本一致。
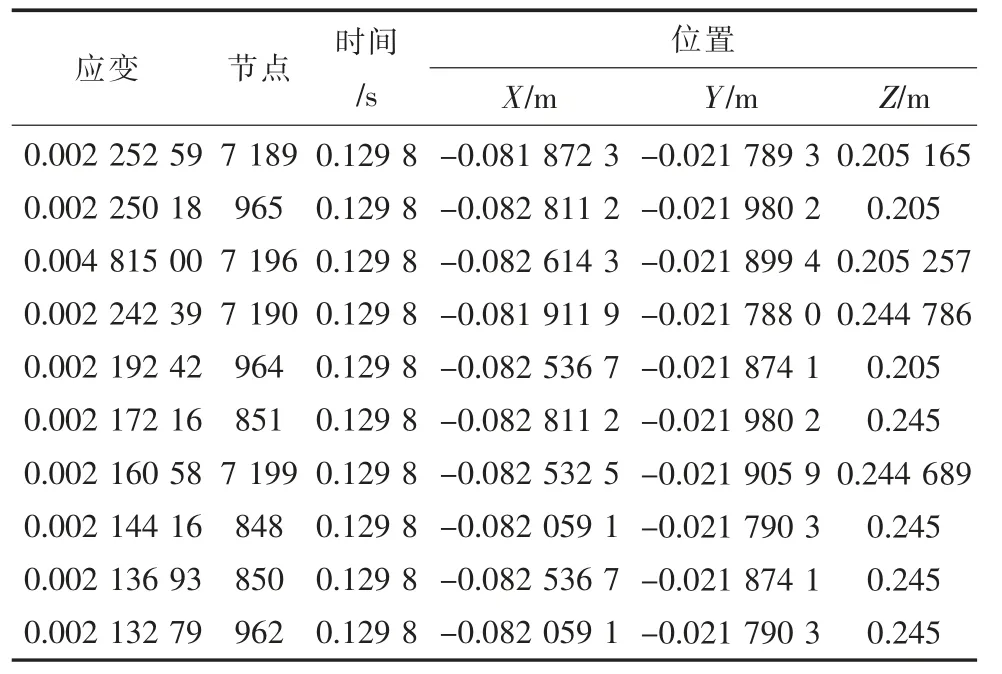
表1 斷路器分合閘過程中拐臂應變最大節點信息
通過剛柔混合動力學模型可獲得斷路器操動機構動作過程中的輸出拐臂載荷譜。分合閘過程中,輸出拐臂的載荷譜如圖11 所示。由圖可見,在分合閘過程中拐臂上下孔載荷存在差異:合閘過程中,拐臂上孔存在較大載荷,而下孔載荷較小;分閘過程中,拐臂上下孔載荷變化趨勢相似,但下口承受載荷較大。這是因為拐臂下孔與油緩沖器相連,所以在合閘過程中載荷較小。

圖11 拐臂的載荷譜
2.2 疲勞壽命計算
2.2.1 有限元分析結果
利用nCode 軟件對拐臂進行疲勞分析時,需要讀入有限元分析結果,所以首先需要利用ANSYS Workbench 對拐臂進行有限元分析。斷路器分、合閘過程中,拐臂受力情況差別較大,可將其分解為兩種工況,每種工況下的受力值由載荷譜決定。第一種工況下設置拐臂中孔為固定約束,上孔受力為51.2 kN;第二種工況下設置拐臂中孔為固定約束,下孔受力為59.99 kN。兩種工況下拐臂受力設置如圖12 所示。

圖12 拐臂受力設置情況
由圖13 得知,兩種工況下的最大應力應變分別在上孔和下孔附近,最大應力分別為563.47 MPa 和656.86 MPa,最大應變分別為0.002 8 和0.003 3。

圖13 兩種位置下應力和應變分析結果
2.2.2 疲勞壽命仿真結果
利用nCode 軟件對拐臂進行疲勞壽命分析。拐臂材料為40Cr,材料的抗拉強度為750 MPa,將有限元分析結果以及載荷譜導入nCode 軟件,得到拐臂疲勞壽命云圖如圖14 所示。可見,拐臂的上下孔處疲勞壽命最短,說明在該位置處更容易產生裂紋,最短壽命位于拐臂下孔,為60 430次,可滿足國標中對斷路器能夠進行10 000 次操作的要求[5]。

圖14 拐臂疲勞壽命云圖
3 結論
本文基于多體系統動力學理論和液壓緩沖理論,采用Adams 軟件和AMESim 軟件聯合仿真的方法,建立了帶油緩沖器的高壓斷路器彈簧操動機構動力學仿真模型,對斷路器分合閘過程中操動機構的動作情況進行仿真,并與實驗結果進行對比;同時采用疲勞壽命分析軟件對關鍵部件的疲勞壽命進行仿真,得到以下結論:
(1)利用Adams 與AMESim 建立聯合仿真模型,對斷路器分合閘過程進行仿真,得到的輸出拐臂行程曲線與實驗值基本一致,驗證了聯合仿真模型的正確性,為含緩沖器的斷路器機構仿真提供了新的分析方法。
(2)對比多剛體動力學模型仿真結果與剛柔混合動力學模型仿真結果可知,由于拐臂在斷路器操動機構運動過程中應變量較小,機構整體運動受拐臂應變的影響較小。
(3)在斷路器機構合閘過程中,拐臂上通孔受力大于下通孔,且兩者的載荷譜差異大;在分閘過程中,拐臂上通孔受力小于下通孔,兩者的載荷譜變化規律相似。
(4)對拐臂進行疲勞壽命計算后發現,拐臂疲勞壽命可達到60 000 次以上,拐臂疲勞壽命最短位置處于拐臂下通孔位置。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
